Изобретение относится к радиолокации и радионавигации и может быть использовано для измерения угловых координат (УК) объектов в системах со сверхсканированием (Гинзбург В.М. Формирование и обработка изображений в реальном времени. Методы быстрого сканирования. М. Радио и связь, 1986).
Известен способ фазового измерения УК (Финкельштейн М.И. Основы радиолокации. Учебник для вузов. М. Радио и связь, 1983, с. 424), заключающийся в измерении разности фаз ΔΦ сигналов, принимаемых в точках, разнесенных на расстояние базы bx
Dv=(2π/λ)×bxcosα.
Точность данного способа зависит от длины базы bx, поэтому данный способ принципиально не позволяют измерять УК в одной точке приема.
Известен амплитудный способ приема УК (Теоретические основы радиолокации. / Под ред. В.В.Дулевича. Учебник для вузов. М. Сов. радио, 1978, с. 260-261), заключающийся в сканировании диаграммы направленности антенны (ДНА) с угловой скоростью Ω, приеме отраженного от цели сигнала и определении положения сканирующей ДНА в момент максимума огибающей амплитуд сигнала, что отождествляется с направлением на цель. Однако данный способ имеет низкую точность измерения УК ДНА из-за слабого изменения амплитуды сигнала в окрестности максимума ДНА.
В известных системах со скрытым сверхсканированием (Коростелев А.А. Пространственно-временная теория систем. Методическое пособие для вузов. М. Радио и связь, 1987, с. 96-97) используется цифровой способ приема УК. При цифровом способе промежуток времени между началом периода сканирования и коротким импульсом на выходе заполняется счетными импульсами. Показания счетчика импульсов пропорциональны направляющему косинусу UQ:
UQ=cosθ=λt3/bτпр,
где b линейный размер антенной решетки в плоскости сканирования;
λ длина волны;
t3 момент окончания принятого сигнала, относительно начала сканирования ДНА на прием;
tпр длительность импульса при приеме.
Однако данный способ имеет низкую точность измерения УК из-за систематической погрешности измерения, заключающейся в учете местоположения лоцируемой цели внутри формируемого "слоя видимости" (СВ) и различия законов сканирования при излучении и приеме. Недостатком, исключающим возможность рассмотрения данного способа как прототипа, является то, что он использует только линейный закон сканирования ДНА.
Наиболее близким техническим решением к предлагаемому изобретению является амплитудный способ измерения УК посредством сравнения огибающих амплитуд принимаемого сигнала (Теоретические основы радиолокации. / Под ред. В. В. Дулевича. Учебник для вузов. М. Сов. радио, 1978, с.260-262), заключающийся в излучении импульсного сигнала при сканировании диаграммы направленности антенны в некотором угловом секторе (θн, θн+θобз), сканировании диаграммы направленности антенны в этом же угловом секторе (θн, θн+θобз) при приеме отраженного от цели сигнала и определении направления на цель (θц) согласно выражению:
θц=(θ1+θ2)/2,
где θ1 угловое положение ДНА в момент начала приема отраженного от цели сигнала;
θ2 угловое положение ДНА в момент окончания приема отраженного от цели сигнала;
Однако данный способ имеет низкую точность измерения УК в случае сверхсканирования ДНА.
Изобретение направлено на решение задачи повышения точности измерения УК целей за счет дополнительного измерения момента времени t3, соответствующего пропаданию отраженного от цели сигнала относительно начала сканирования антенны на прием, а определение направления на цель для априорно известных временных законов сканирования антенны при излучении tизл(θ) и приеме tпр(θ) сигнала осуществляют путем решения следующего уравнения: ;
;
θпр(t) функция, обратная закону сканирования tпр(θ):
θпр(tпр(θ))=θ;
θo ширина диаграммы направленности антенны по заданному пороговому уровню.
Решение этой задачи наиболее актуально при создании (разработке) новых систем радиолокации и радионавигации (Коростелев А.А. Пространственно-временная теория систем: Методическое пособие для вузов. М. Радио и связь, 1987, с.96-97).
Сущность изобретения состоит в том, что от известного способа измерения УК, заключающегося в излучении импульсного сигнала при сканировании ДНА в некотором угловом секторе (θн, θн+θобз), сканировании ДНА при приеме, приеме отраженного от цели сигнала и определении направления на цель, предлагаемый способ измерения отличается тем, что дополнительно измеряют момент времени t3, соответствующий пропаданию отраженного от цели сигнала относительно начала сканирования антенны на прием, а определение направления на цель для априорно известных временных законов сканирования антенны при излучении tизл(θ) и приеме tпр(θ) сигнала осуществляют путем решения следующего уравнения:
θпр(t) функция, обратная закону сканирования tпр(θ)::
θпр(tпр(θ)=θ;
θo ширина диаграммы направленности антенны по заданному пороговому уровню.
Сущность способа поясняется фиг.1-4, где соответственно изображены:
распределение по дальности формируемого при излучении импульса τизл(θ) и "строба" по дальности τпр(θ) при приеме в секторе сканирования θ ∈ (θн, θн+θобз) (фиг.1);
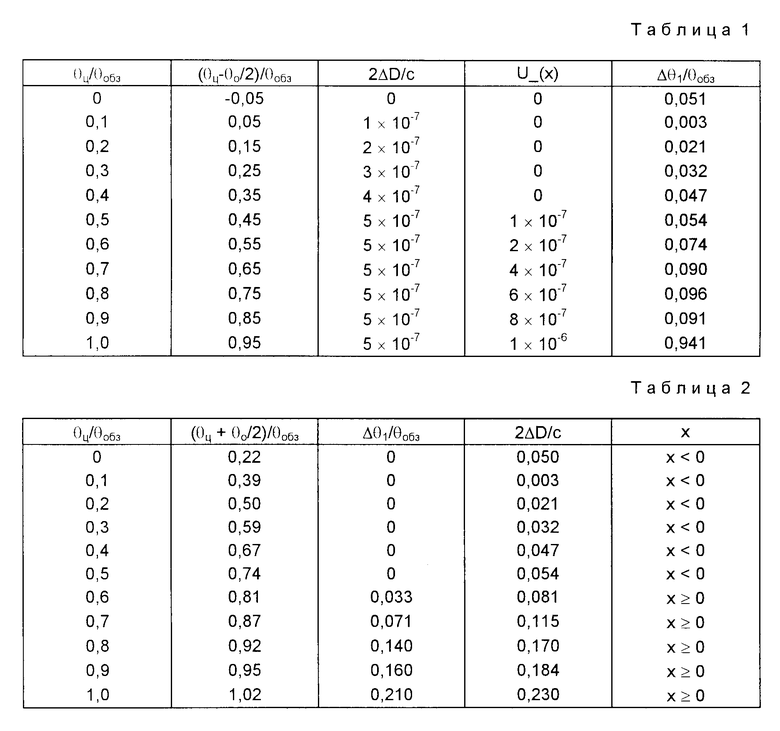
временная диаграмма процесса измерений (фиг.2);
блок-схема системы, реализующей предлагаемый способ измерения УК (фиг.3);
пример распределения систематической погрешности измерения УК способом-прототипом в угловом секторе сканирования, устраняемой предлагаемым способом (фиг.4).
Сущность способа заключается в следующем.
ДНА сканирует по закону θизл(t) и за время длительности излучаемого импульса τизл поворачивается в секторе обзора (θн, θн+θобз). Через определенный промежуток времени τпп в том же секторе начинает сканировать ДНА по закону θпр(t) для приема отраженного от цели сигнала. За время разворота ДНА при приеме τпр луч поворачивается с направления θн до направления (θн+θобз) (фиг. 1,2). Во время сканирования на прием с направления θц принимается отраженный от цели сигнал (фиг.2), длительность которого τs определяется как временем разворота ДНА относительно этого направления θц на угол, равный ширине ДНА τs=tпр(θц+θo/2)-tпр(θц-θo/2), так и положением цели внутри образованного СВ (фиг.1).
Из фиг.1 и 2 видно, что момент времени окончания приема с направления θц соответствует окончанию действия отраженного сигнала от цели в направлении θц, равен:
tпр(θц+θo/2)=t3, (2)
т.к. временной закон сканирования tпр(θ) является функцией, обратной закону сканирования θпр(t) при приеме, то направление на цель определяется по формуле:
θц=θпр(t3)-θo/2. (3)
Различие законов сканирования ДНА при излучении θизл(t) и приеме θпр(t) эквивалентно различию длительностей τизл(θ) излученного в направлении θц импульса:
τизл(θц)=tизл(θц+θo/2)-tизл(θц-θo/2) (4)
Поэтому для однозначной "привязки" к моменту времени окончания, формируемого в направлении θц "строба", необходимо проверить выполнение одного из неравенств:
где x показывает отличие длительности формируемого в направлении θц "строба" от длительности излученного в данном направлении θц сигнала, что определяет ширину СВ в данном направлении, а направление на цель θц можно однозначно определить из выражения:
θц=θпр(t3+U-(x))-θo/2, (7)
которое решается в два этапа. На первом определяют значение асимметричной функции U_ (х), а на втором направление на цель θц в соответствии с уравнением (7) (при условии x≥0) или в соответствии с уравнением (3) (при x<0).
В традиционном подходе (способе-прототипе) направление на цель по методу "вилки" определяют согласно выражению:
Т. е. предлагаемый способ позволяет повысить точность определения УК за счет учета расположения цели внутри образованного СВ и учета различия законов сканирования ДНА на излучение θизл(t) и при приеме θпр(t).
Повышение точности измерения УК можно определить из выражения для абсолютной погрешности измерения: .
.
Определение УК θц согласно (7) позволяет по сравнению со способом-прототипом устранить систематическую ошибку измерения Δθ:
вызванную методическими погрешностями измерения: Δθ1, возникающей из-за неучета местоположения цели по дальности ΔD (фиг.1) внутри формируемого СВ:
а также из-за неучета различных законов сканирования при излучении θизл(t) и приеме θпр(t) сигналов Δθ2:
Δθ2=θпр(t3+U-(x))-θпр(t3). (12)
Пример 1. При линейном законе сканирования ДНА на излучении сигнала
θизл(t)=θобзt/τизл+θн, (13)
и квадратичном законе сканирования луча антенны при приеме отраженного сигнала
θпр(t)=(θобзt/τпр)2+θн, (14)
в случае равенства времен сканирования луча антенны в секторе обзора на излучение τизл и прием τпр
τобз=τизл=τпр, θн=0, (15)
методическая ошибка измерения τθ1 будет равна: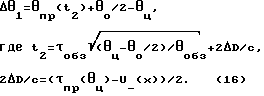
Согласно примеру распределение методической ошибки Δθ1/θобз в секторе сканирования [0,θобз] приведено в табл. 1 и на фиг. 4 для случая θo/θобз=0,1.
Пример 2. Для условий примера 1 (13)oC(15) при θo/θобз=0,1 методическая ошибка Δθ2 будет равна:
Δθ2=θобзU-(x)(2t3+U-(x))/τобз, (17)
а систематическая погрешность Δθ равна:
В условиях данного примера распределение величин Δθ2/θобз и Δθ/θобз приведено в табл. 2 и на фиг.2.
Система, реализующая предлагаемый способ измерения УК для систем со сверхсканированием, состоит из антенны 1, системы управления антенной 2 (СУА), антенного переключателя 3 (АП), передатчика 4 (ПРД), приемника 5 (ПРМ), устройства формирования импульса окончания счета 6 (УФИОС), триггера 7 (ТР), измерителя временного интервала 8 (ИВИ), микропроцессора 9 (МП), синхрогенератора 10 (СНХР) и счетчика-делителя на два 11 (СД), причем информационный вход антенны 1 подключен к выходу АП 3, первый вход АП 3 соединен с входом приемника 5, выход приемника подключен к входу УФИОС 6, выход УФИОС 6 соединен с входом установки в нулевое состояние ТР 7, выход триггера 7 подключен к входу ИВИ 8, выход ИВИ 8 соединен с входом МП 9, выход МП 9 является выходом устройства, пусковой вход устройства соединен с входом начальной установки триггера 7 и входом запуска синхрогенератора 10, выход СНХР 10 подключен к синхровходам АП 3 и СУА 2 и к входу СД 11, выход СД 11 подключен к входу установки в единичное состояние ТР 7, выход передатчика 4 соединен с вторым входом АП 3, выход СУА 2 соединен с управляющим входом антенны 1.
Система, реализующая данный способ (фиг.3), работает следующим образом.
Пусковой импульс на пусковом входе устройства переводит триггер 7 в начальное состояние и запускает синхрогенератор 10. В начальном состоянии на входе триггера 7 должен быть нулевой потенциал. По первому импульсу с синхрогенератора 10 антенный переключатель 3 подключает выход передатчика 4 к входу антенны 1, а система управления антенной (Ушкар М.Н. Микропроцессорные устройства в радиоэлектронной аппаратуре. / Под ред. В.Ф.Высоцкого. М. Радио и связь, 1988, с. 128) обеспечивает сканирование луча антенны 1 за время длительности импульса передатчика 4 в заданном секторе (θн, θн+θобз) по закону θизл(t). Этот же первый импульс с выхода синхрогенератора 10 поступает на вход счетчика 11. После окончания действия импульса передатчика 4 СУА 2 переводит луч антенны 1 в начальное направление θн. По второму импульсу синхрогенератора 10 антенный переключатель 3 подключает выход антенны 1 к входу приемника 5, а система управления антенной 2 обеспечивает сканирование луча антенны 1 за время "строба" (фиг.2) в секторе обзора (θн, θн+θобз) по закону θпр(t) Этот же второй синхрогенератора 10 поступает на вход СД 11, на выходе которого появляется сигнал. Сигнал с выхода счетчика 11 поступает на вход установки триггера 7 в единичное состояние, в результате чего на выходе триггера 7 появится высокий потенциал, который подается на вход измерителя временного интервала 8, работающий, например, по методу счетных импульсов (Финкельштейн М.И. Основы радиолокации. Учебник для вузов. М. Радио и связь, 1983, с. 536), начинает измерение. Отраженный от цели радиосигнал (фиг.1) принимается антенной 1 и через антенный АП 3 поступает на вход приемника 5. С выхода приемника 5 видеоимпульс поступает на вход УФИОС 6. УФИОС 6, например одновибратор, (Исаков Ю.А. и др. Основы промышленной электроники. Киев: Техника, 1976, с. 544) формирует импульс, фронт которого соответствует времени спада видеоимпульса с выхода приемника 5.
Импульс с выхода УФИОС 6 поступает на вход установки триггера 7 в нулевое состояние, на выходе которого в результате этого появится нулевой потенциал. Нулевой потенциал с выхода триггера 7 поступает на вход ИВИ 8, что соответствует моменту окончания измерения. Результат измерения (например, код) с выхода ИВИ 8 поступает на вход МП 9 (Казаринов Ю.М. Номоконов В.Н. Филлипов Ф.В. Применение микропроцессоров и микроЭВМ в радиотехнических системах. Учебное пособие для радиотехнических спец.вузов. М. Высшая школа, 1988. с. 207), который вычисляет направление на цель в два этапа. На первом этапе вычисляет значение асимметричной функции U_(x), а на втором этапе - направление на цель θц в соответствии с уравнением:
θц=θпр(t3+U-(x))-θo/2,
при условии x = τпр(θц)-τизл(θц) ≥ 0,
где t3 код промежутка времени между началом сканирования луча антенны на прием и окончанием действия принятого отраженного сигнала, который подается на вход МП 9 с выхода ИВИ 8;
x код промежутка времени, получаемый в результате сравнения длительности формируемого в направлении θц строба и длительности излученного в данном направлении θц сигнала.
Если x<0, тогда направление на цель θц вычисляется по формуле:
θц=θпр(t3)-θo/2.
По сравнению с прототипом предлагаемый способ измерения УК для систем со сверхсканированием позволяет повысить точность измерения на величину:
Δθц=[θпр(t3)+θпр(t3-τs)-2θпр(t3+U-(x))θo]/2,
где θo ширина ДНА; t3 момент времени между началом сканирования ДНА при приеме и окончанием действия принятого отраженного от цели сигнала; τs длительность принятого импульса; θпр(t) закон сканирования ДНА при приеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1992 |
|
RU2101726C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ВНЕШНЕЙ КОНТРОЛИРУЕМОЙ ОБЛАСТИ ПРОСТРАНСТВА ВО ВНУТРЕННЮЮ ОБЛАСТЬ НАБЛЮДЕНИЯ | 1994 |
|
RU2129718C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 1990 |
|
RU2012901C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА НАБЛЮДЕНИЯ ОБЪЕКТА | 1992 |
|
RU2037836C1 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1994 |
|
RU2093894C1 |
| ОПТИЧЕСКИЙ МУЛЬТИВИБРАТОР | 1992 |
|
RU2024898C1 |
| ОПТИЧЕСКИЙ УМНОЖИТЕЛЬ | 1994 |
|
RU2087028C1 |
| УСТРОЙСТВО ДЛЯ СИНТЕЗА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ | 1994 |
|
RU2110086C1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ФУНКЦИОНАЛЬНОГО УРАВНЕНИЯ | 1989 |
|
RU2047891C1 |
| ОПТОЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ РЕШЕНИЯ ДИФФЕРЕНЦИАЛЬНОГО ПАРАБОЛИЧЕСКОГО УРАВНЕНИЯ | 1989 |
|
RU2042179C1 |
Изобретение относится к области радиолокации и радионавигации и может быть использовано для измерения угловых координат объектов в системах со сверхсканированием. Сущность способа состоит в повышении точности измерения угловых координат объекта за счет дополнительного измерения момента времени t3, соответствующего пропаданию отраженного от цели сигнала относительно начала сканирования антенны на прием, и определения направления на цель для априорно известных временных законов сканирования антенны при излучении tизл(θ) и приеме tпр(θ) сигналов согласно выражению: ;
;
θпр(t) - функция, обратная временному закону сканирования tпр(θ):
θпр(tпр(θ))=θ;
θo - ширина диаграммы направленности антенны по заданному пороговому уровню. 2 табл., 4 ил.
Способ измерения угловых координат в системах со сверхсканированием, заключающийся в излучении импульсного сигнала при сканировании диаграммы направленности антенны в некотором угловом секторе (θн, θн+θобз), сканировании диаграммы направленности антенны в этом же угловом секторе (θн, θн+θобз) при приеме отраженного от цепи сигнала и определении направления на цель (θц), отличающийся тем, что дополнительно измеряют момент времени tз, соответствующий пропаданию отраженного от цепи сигнала относительно начала сканирования антенны на прием, а определение направления на цель априорно известных временных законов сканирования антенны при излучении tизл(θ) и приеме tпр(θ) сигнала осуществляют путем решения следующего уравнения
θц = θпр(t3+U-(x))-θo/2,
где 
θпр(t) - функция, обратная временному закону сканирования tпр(θ),
θпр(tпр(θ)) ≡ θ;
θo - ширина диаграммы направленности антенны по заданному пороговому уровню.
| Финкельштейн М.И | |||
| Основы радиолокации | |||
| - М.: Радио и связь, 1983, с | |||
| Способ приготовления хлебного вина | 1925 |
|
SU424A1 |
| Коростелев А.А | |||
| Пространственно-временная теория системы | |||
| Методические пособия для вузов | |||
| - М.: Радио и связь, 1987, с | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Теоретические основы радиолокации | |||
| /Под | |||
| ред | |||
| В.В.Дулевича | |||
| Учебник для вузов | |||
| - М.: Сов.радио, 1978, с | |||
| Прибор для периодического прерывания электрической цепи в случае ее перегрузки | 1921 |
|
SU260A1 |
