Изобретение относится к методам и средствам обнаружения скрытых объектов из электропроводных и/или ферромагнитных материалов и непосредственно касается индукционного способа обнаружения таких объектов и измерительного преобразователя для его осуществления. Изобретение предназначено для использования преимущественно в металлоискателях для целей геологоразведки, археологии, криминалистики, контроля при досмотрах и т.п.
Известен индукционный способ обнаружения скрытых объектов, согласно которому в исследуемой среде возбуждают первичное переменное магнитное поле, вектор магнитной индукции которого нормален к ее поверхности, воспринимают с помощью пары разнесенных приемных катушек результирующее магнитное поле, сравнивают наведенные в приемных катушках сигналы и выделяют разностный сигнал, по которому судят о факте присутствия в исследуемой среде скрытых объектов /прототип - авторское свидетельство СССР N 1712927, G 01 V 3/11, опубликовано в 1992 г.)
В этом способе с помощью каждой из пары разнесенных приемных катушек равным образом воспринимают соответствующую часть одного и того же результирующего магнитного поля, наводящего в каждой из них сравнимые по величине сигналы. Следовательно, разностный сигнал приемных катушек по существу представляет собой разность соответствующих наведенных в них полезных сигналов. По этой причине реальная эффективность обнаружения скрытых объектов описанным способом, выражаемая уровнем разностного полезного сигнала, может оказаться сильно сниженной по сравнению с потенциально достижимой. Так, в частности, полезный сигнал может даже отсутствовать, например, при симметричном расположении двух или более одинаковых скрытых объектов на одинаковой глубине. Расположенные подобным образом объекты все же могут быть обнаружены описанным способом, но только в динамическом режиме при перемещениях первичного магнитного поля вдоль поверхности исследуемой среды в различных направлениях. По той же причине описанный способ практически полностью неэффективен, если скрытые объекты представлены россыпью мелких частиц, более или менее равномерно распределенных в объеме исследуемой среды. Помимо этого, в описанном способе уровень полезного сигнала приемных катушек может резко изменяться и даже инвертироваться /изменять знак/ в зависимости от положения каждого скрытого объекта в пределах ширины зоны обнаружения. Это еще более снижает эффективность обнаружения, особенно с учетом того, что, в частности, цветные и черные металлы вызывают полезные сигналы противоположных знаков.
Известный измерительный преобразователь /см. тот же прототип/ для осуществления описанного способа содержит корпус с рабочей поверхностью, в котором установлены катушка возбуждения первичного магнитного поля, расположенная в непосредственной близости от рабочей поверхности корпуса таким образом, что ее ось нормальна к последней, и пара приемных катушек, соединенных между собой встречно-последовательно, при этом общая ось пары приемных катушек расположена в плоскости витков катушки возбуждения и нормальна к ее оси.
Недостатки описанного измерительного преобразователя обусловлены недостатками реализуемого им известного способа обнаружения скрытых объектов, описанными выше. Кроме того, описанное расположение приемных катушек относительно катушки возбуждения, имеющее целью свести к минимуму нежелательную прямую индуктивную связь между нею и приемными катушками, одновременно приводит к тому, что уровень полезного сигнала, наводимого в приемных катушках, также соответственно уменьшается. Это приводит к дополнительному снижению эффективности обнаружения скрытых объектов.
С учетом изложенного, решаемая настоящим изобретением задача состоит в повышении по сравнению с известным уровнем техники эффективности обнаружения скрытых объектов благодаря повышению уровня полезного сигнала и его независимости от характера распределения скрытых объектов в исследуемой среде.
Эта задача решается тем, что в индукционном способе обнаружения скрытых объектов, согласно которому в исследуемой среде возбуждают первичное переменное магнитное поле, вектор магнитной индукции которого нормален к ее поверхности, воспринимают с помощью пары разнесенных приемных катушек результирующее магнитное поле, сравнивают наведенные в приемных катушках сигналы и выделяют разностный сигнал, по которому судят о факте присутствия в исследуемой среде скрытых объектов, согласно основному воплощению изобретения симметрично первичному магнитному полю синхронно с ним возбуждают встречное магнитное поле, взаимодействующее с ним по разграничительной плоскости симметрии, параллельной поверхности исследуемой среды, и раздельно воспринимают результирующие магнитные поля, возбуждаемые первичным магнитным полем, с одной стороны, и встречным магнитным полем, с другой стороны.
При такой конфигурации магнитных полей исследуемую среду пронизывает только первичное магнитное поле, расположенное по одну сторону от разграничительной плоскости симметрии, параллельной поверхности исследуемой среды, тогда как встречное магнитное поле, расположенное по другую сторону от разграничительной плоскости симметрии, пронизывает лишь пространство над исследуемой средой. Соответственно одна из пары приемных катушек воспринимает только результирующее магнитное поле, несущее полезную информацию, в то время как другая приемная катушка воспринимает только поле, полезную информацию заведомо не несущее. Разностный полезный сигнал приемных катушек имеет при этом максимальный потенциально достижимый уровень для конкретных условий. Одновременно устраняются присущие прототипу резкое изменение и тем более инвертирование полезного сигнала в пределах ширины зоны обнаружения. Кроме того, полезный сигнал перестает зависеть от характера распределения скрытых объектов в исследуемой среде в пределах площади зоны обнаружения и по существу является интегральным для всех скрытых объектов, присутствующих в исследуемой среде в пределах зоны досягаемости. В результате существенно повышается эффективность обнаружения локальных скрытых объектов и достигается возможность обнаружения объектов в виде россыпи мелких частиц.
Указанная задача более полно решается в предпочтительном воплощении изобретения, согласно которому дополнительно к первичному и встречному магнитным полям и синхронно с ними возбуждают ограничительное магнитное поле, симметричное относительно разграничительной плоскости симметрии, параллельной поверхности исследуемой среды.
При этом благодаря взаимодействию первичного магнитного поля с противоположно направленным ограничительным магнитным полем первое получает боковое ограничение поверхностью соприкосновения со вторым. Вследствие этого зона обнаружения строго ограничивается по ширине, а поток магнитной индукции первичного магнитного поля возрастает соответственно степени этого ограничения. В результате адекватно возрастает поток магнитной индукции вторичного магнитного поля, обусловленного присутствием в исследуемой среде скрытых объектов, и соответственно увеличивается уровень полезного сигнала, повышая эффективность обнаружения скрытых объектов.
Измерительный преобразователь для осуществления описанного индукционного способа обнаружения скрытых объектов, как и известный, содержит корпус с рабочей поверхностью, в котором установлены по крайней мере одна катушка возбуждения первичного магнитного поля, расположенная в непосредственной близости от рабочей поверхности корпуса таким образом, что ее ось нормальна к последней, и по крайней мере одна пара приемных катушек, соединенных между собой встречно-последовательно. Согласно основному исполнению в паре с катушкой возбуждения первичного магнитного поля и соосно с ней измерительный преобразователь содержит катушку возбуждения встречного магнитного поля, которая расположена на большем расстоянии от рабочей поверхности корпуса, чем катушка возбуждения первичного магнитного поля, и соединена с ней встречно, при этом приемные катушки расположены попарно-симметрично по обе стороны от разграничительной плоскости симметрии, параллельной рабочей поверхности корпуса.
В предпочтительном исполнении каждая из приемных катушек расположена таким образом, что поверхность, образованная замкнутым контуром ее витков, совпадает с поверхностью намотки соответствующей катушки возбуждения.
В другом предпочтительном исполнении приемные катушки расположены симметрично относительно плоскости симметрии катушек возбуждения первичного и встречного магнитных полей, содержащей их ось, таким образом, что оси приемных катушек нормальны к упомянутой плоскости симметрии.
В следующем предпочтительном исполнении каждая из приемных катушек расположена в плоскости витков соответствующей катушки возбуждения соосно с ней.
В наиболее предпочтительном исполнении для осуществления предпочтительного воплощения индукционного способа обнаружения скрытых объектов измерительный преобразователь дополнительно содержит по крайней мере одну катушку возбуждения ограничительного магнитного поля, которая соединена встречно с другими катушками возбуждения и расположена симметрично относительно разграничительной плоскости симметрии, параллельной рабочей поверхности корпуса, таким образом, что поверхность, образованная замкнутым контуром ее витков, эквидистантна поверхности намотки катушки возбуждения первичного магнитного поля.
Описанный измерительный преобразователь реализует соответствующий изобретению способ обнаружения скрытых объектов, направлен на решение той же задачи и обеспечивает достижение того же технического результата, описанного выше, а именно повышения эффективности обнаружения скрытых объектов. Кроме того, достижению этого технического результата в предпочтительных исполнениях измерительного преобразователя способствует также описанное выше пространственное расположение приемных катушек, благодаря чему дополнительно повышается уровень разностного полезного сигнала приемных катушек, тогда как сигналы помех от внешних и собственных магнитных полей взаимно уничтожаются.
Более подробно изобретение поясняется ниже на примерах его практической реализации, представленных на следующих чертежах:
фиг. 1 - общий вид измерительного преобразователя в перспективном изображении с частичным разрезом /исполнение согласно фиг. 4/;
фиг. 2, 4, 6 - исполнения измерительного преобразователя в поперечном сечении /корпус не показан/;
фиг. 3, 5, 7 - характеристики измерительного преобразователя согласно фиг. 2, 4, 6 соответственно;
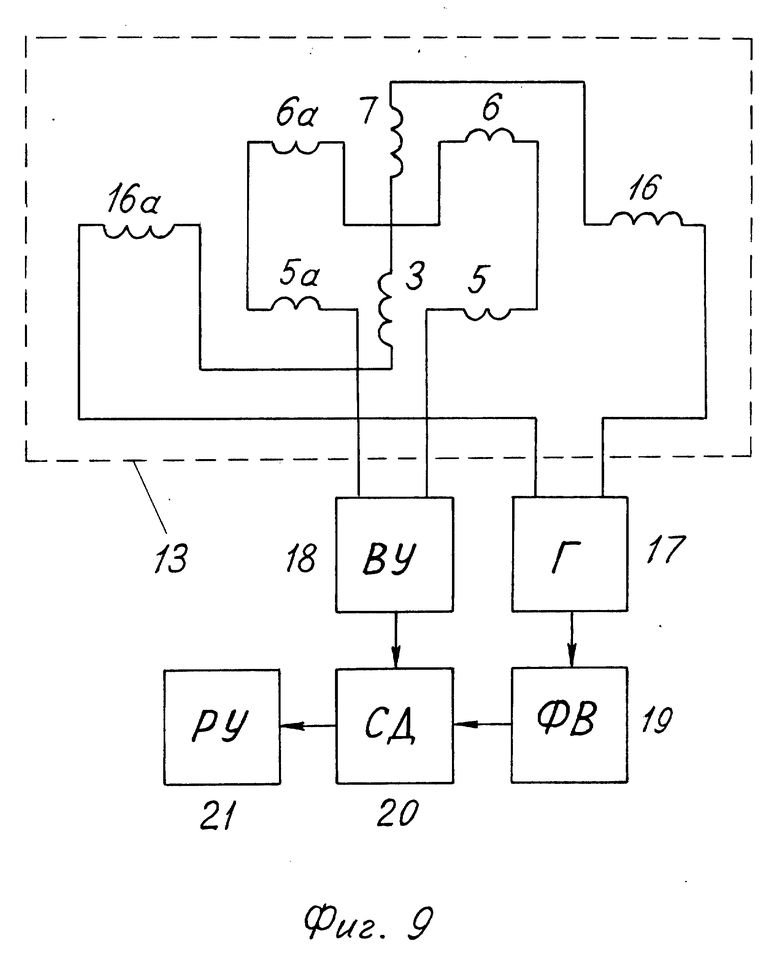
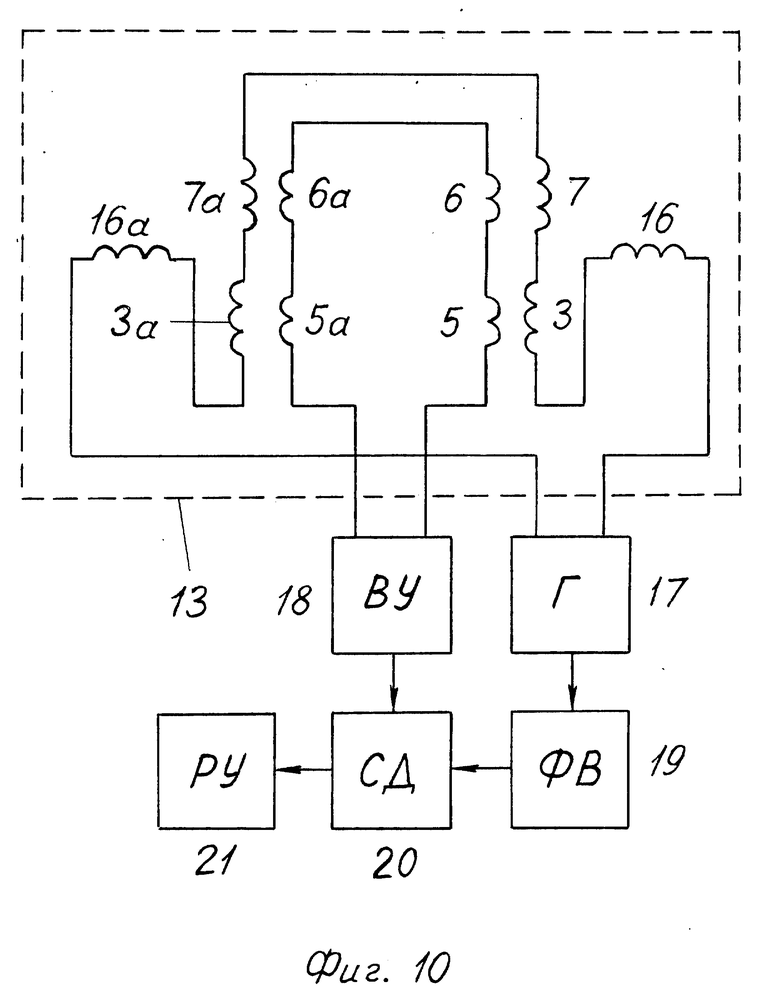
фиг. 8, 9, 10 - блок-схемы металлоискателя с измерительным преобразователем согласно фиг. 2, 4, 6 соответственно.
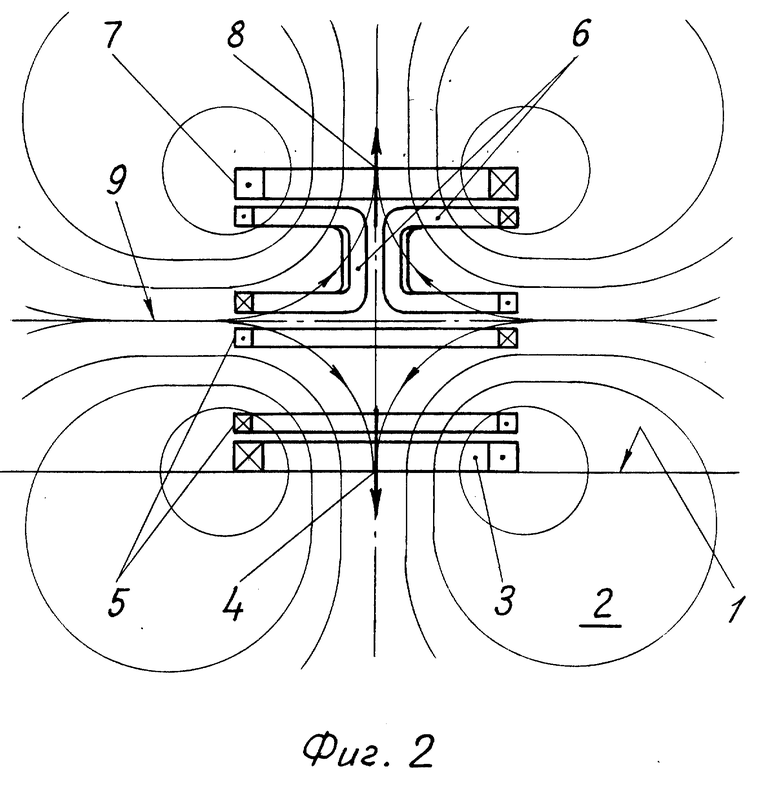
Индукционный способ обнаружения скрытых объектов состоит в том, что над поверхностью 1 исследуемой среды 2 /фиг. 2/ с помощью катушки возбуждения 3 возбуждают первичное магнитное поле, вектор магнитной индукции 4 которого нормален к поверхности 1 исследуемой среды 2, воспринимают с помощью пары разнесенных приемных катушек 5 и 6 результирующее магнитное поле, сравнивают наведенные в приемных катушках 5, 6 сигналы и выделяют разностный сигнал, по которому судят о факте присутствия в исследуемой среде 2 скрытых объектов.
Согласно основному воплощению изобретения симметрично первичному магнитному полю 4 синхронно с ним возбуждают с помощью дополнительной катушки возбуждения 7 встречное магнитное поле с противоположно направленным вектором магнитной индукции 8, которое взаимодействует с первичным магнитным полем 4 по разграничительной плоскости симметрии 9, параллельной поверхности 1 исследуемой среды 2.
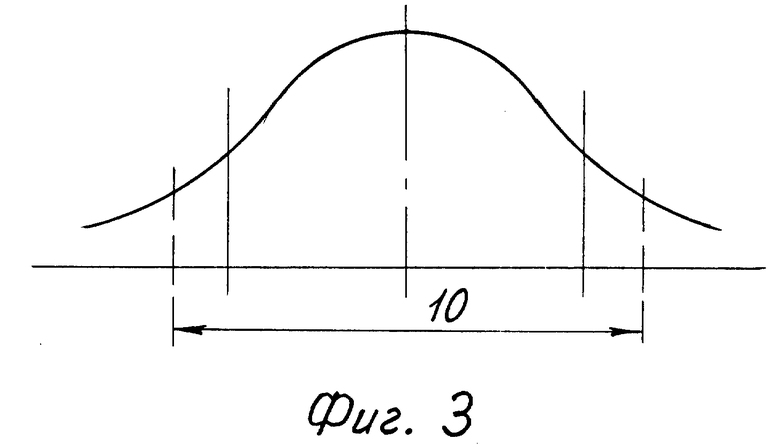
Как видно из фиг. 2, при такой конфигурации магнитных полей исследуемую среду 2 пронизывает только поток магнитной индукции 4 первичного магнитного поля, полностью расположенный со стороны разграничительной плоскости симметрии 9, обращенной к поверхности 1 исследуемой среды 2. Поток магнитной индукции 8 встречного магнитного поля, полностью расположенный с другой стороны разграничительной плоскости симметрии 9, пронизывает только пространство над исследуемой средой 2. Соответственно одна приемная катушка 5 воспринимает только результирующее магнитное поле, которое несет полезную информацию, в то время как другая приемная катушка 6 - только магнитное поле, которое заведомо не несет полезной информации. Сравнение сигналов, наведенных в каждой из приемных катушек 5, 6, позволяет выделить разностный полезный сигнал, который дает адекватное интегральное представление о присутствии в исследуемой среде 2 скрытых объектов. Уровень разностного полезного сигнала, соответствующий материалу, величине, глубине залегания и количеству скрытых объектов, не зависит от характера их распределения в исследуемой среде 2 и имеет максимальную возможную для конкретных условий величину, в то время как сигналы помех от собственных и внешних полей взаимно уничтожаются. Характеристика измерительного преобразователя, которая представляет зависимость уровня разностного полезного сигнала приемных катушек 5, 6 от положения эталонного объекта в пределах ширины зоны обнаружения 10 на фиксированной глубине, показана на диаграмме фиг. 3.
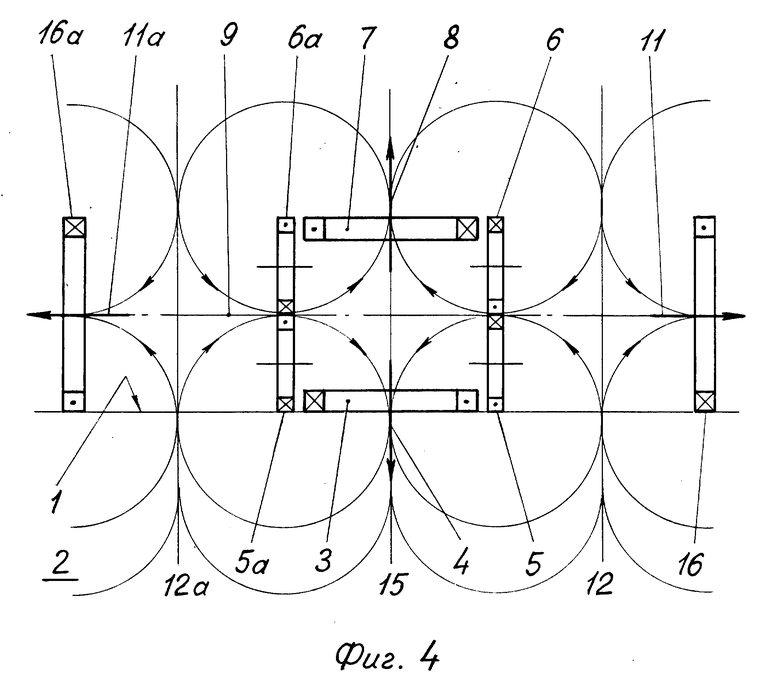
Согласно предпочтительному воплощению изобретения /фиг. 4/ дополнительно к первичному 4 и встречному 8 магнитным полям синхронно с ними возбуждают ограничительное магнитное поле, симметричное относительно разграничительной плоскости симметрии 9, параллельной поверхности исследуемой среды 2, вектор 11 /11а/ магнитной индукции которого расположен в плоскости симметрии 9 нормально к векторам магнитной индукции 4 и 8.
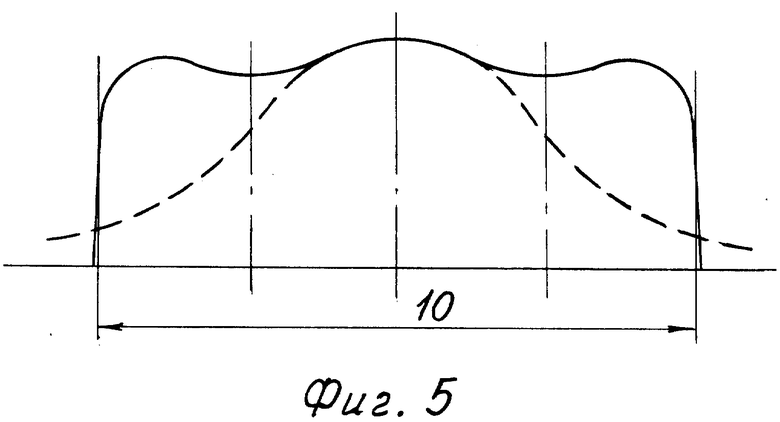
В результате взаимодействия первичного магнитного поля 4 с соответственно направленным ограничительным магнитным полем 11 /11а/ первичное магнитное поле 4 получает боковое ограничение поверхностью 12 /12а/ соприкосновения с ограничительным магнитным полем 11 /11а/. При этом, как видно из сравнения сплошной и пунктирной линий на диаграмме фиг. 5, характеристика измерительного преобразователя выравнивается, а зона обнаружения 10 строго ограничивается по ширине. Благодаря этому поток магнитной индукции 4 первичного магнитного поля соответственно возрастает и в такой же степени возрастает поток магнитной индукции вторичного магнитного поля, исходящий от скрытых объектов. Вследствие этого при прочих равных условиях повышается уровень разностного полезного сигнала, а форма характеристики /фиг. 5/ приближается к предпочтительной П-образной.
Измерительный преобразователь /фиг. 1, 2, 4, 6/ для осуществления описанного способа обнаружения скрытых объектов содержит корпус 13 с рабочей поверхностью 14, в котором установлены по крайней мере одна катушка возбуждения 3 первичного магнитного поля 4, расположенная в непосредственной близости от рабочей поверхности 14 корпуса 13 таким образом, что ее ось нормальна к последней, и по крайней мере одна пара приемных катушек 5, 6, соединенных между собой встречно-последовательно.
Согласно основному исполнению измерительного преобразователя в паре с катушкой возбуждения 3 первичного магнитного поля 4 и соосно с ней он содержит катушку возбуждения 7 встречного магнитного поля 8, которая расположена на большем расстоянии от рабочей поверхности 14 корпуса 13, чем катушка возбуждения 3 первичного магнитного поля 4, и соединена с ней встречно. При этом приемные катушки 5, 6 расположены попарно-симметрично по обе стороны от разграничительной плоскости симметрии 9, параллельной рабочей поверхности 14 корпуса 13. Целесообразное количество пар катушек возбуждения 3, 7 выбирается в пределах, например, нескольких пар; оно определяется конкретной задачей поиска скрытых объектов и ограничивается конструкционными и эксплуатационными соображениями. В таком исполнении измерительного преобразователя в принципе достигается решение поставленной задачи, а именно повышение эффективности обнаружения скрытых объектов благодаря интегральному характеру разностного полезного сигнала приемных катушек 5, 6 и его независимости от характера распределения скрытых объектов в исследуемой среде 2 по ширине зоны обнаружения 10.
Согласно предпочтительному исполнению /фиг. 2/ каждая из приемных катушек 5, 6 расположена таким образом, что поверхность, образованная замкнутым контуром ее витков, по крайней мере, примерно совпадает с поверхностью намотки соответствующей катушки возбуждения 3, 7. В примере, приведенном на фиг. 2, поверхности намотки катушек возбуждения 3, 7 и соответственно поверхности, образованные замкнутыми контурами витков приемных катушек 5, 6, имеют цилиндрическую или близкую к таковой форму. Характеристики измерительного преобразователя в этом исполнении, как показано на диаграмме фиг. 3, имеет плавный, но недостаточно равномерный ход с явно выраженным максимумом, при этом зона обнаружения 10 строго не определена.
Согласно другому предпочтительному исполнению /фиг. 1, 4/ приемные катушки 5, 6 /5а, 6а/ расположены симметрично относительно плоскости симметрии 15 катушек возбуждения 3, 7 первичного 4 и встречного 8 магнитных полей, содержащей их ось, таким образом, что оси всех приемных катушек нормальны к плоскости симметрии 15. В примерах, представленных на фиг. 1, 4, 6, все катушки имеют плоскую прямоугольную или близкую к таковой вытянутую форму. Характеристика измерительного преобразователя в таком исполнении, показанная на диаграмме фиг. 5 пунктирной линией, аналогична показанной на диаграмме фиг. 3.
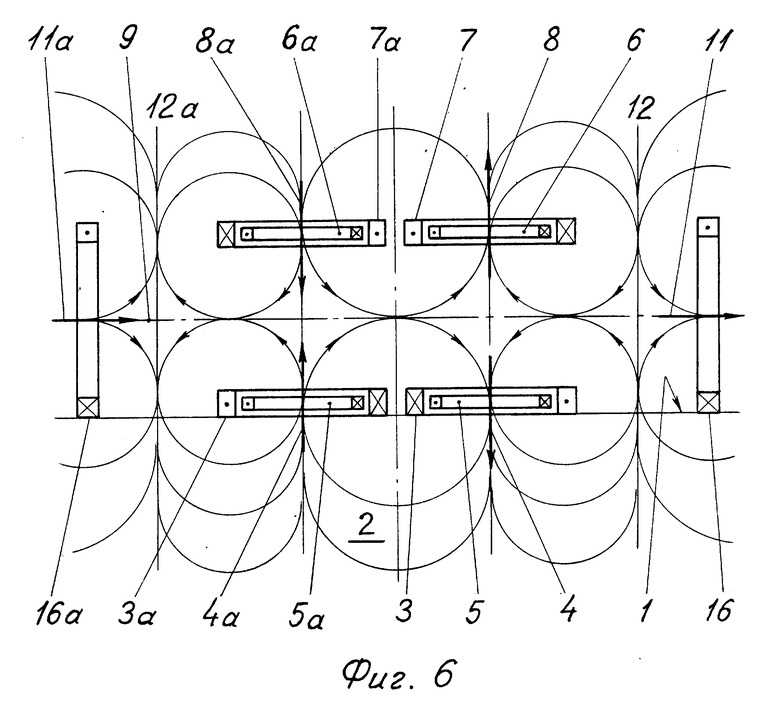
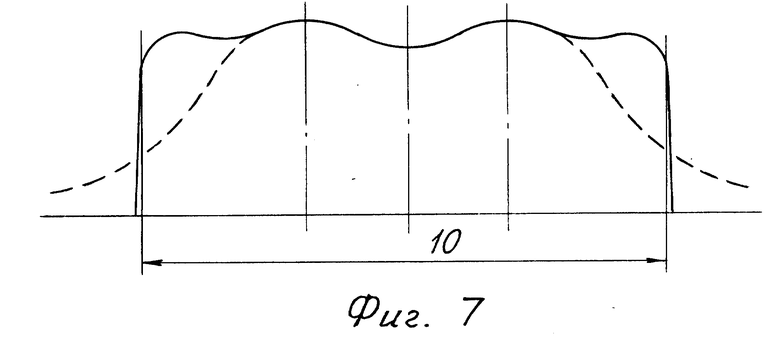
Согласно следующему предпочтительному исполнению /фиг. 6/ каждая из приемных катушек 5, 6 / 5а, 6а/ расположена в плоскости витков соответствующей катушки возбуждения 3, 7 /3а, 7а/ соосно с ней и повторяет ее форму. Характеристика измерительного преобразователя в таком исполнении, показанная на диаграмме фиг. 7 пунктирной линией, отличается от показанной пунктирной линией на диаграмме фиг. 5 отсутствием явно выраженного максимума и большей шириной зоны обнаружения 10.
Согласно наиболее предпочтительному исполнению /фиг. 1, 4, 6/ для осуществления предпочтительного воплощения индукционного способа обнаружения скрытых объектов измерительный преобразователь дополнительно содержит по крайней мере одну катушку возбуждения 16 /16а/ ограничительного магнитного поля 11 /11а/, которая соединена встречно с катушками возбуждения 3, 7 /3а, 7а/ и расположена симметрично относительно разграничительной плоскости симметрии 9, параллельной рабочей поверхности 14 корпуса 13, таким образом, что поверхность, образованная замкнутым контуром ее витков, эквидистантна поверхности намотки катушки возбуждения 3 /3а/ первичного магнитного поля 4 /4а/. В исполнениях согласно фиг. 1, 4, 6 поверхность, образованная замкнутым контуром витков катушки возбуждения 16 /16а/, представляет собой, в частности, плоскость, параллельную плоским боковым частям поверхностей намотки катушек возбуждения 3, 7 /3а, 7а/. Катушка возбуждения 16 /16а/ ограничительного магнитного поля 11 /11а/ не содержит приемных катушек и предназначена исключительно для бокового ограничения сферы действия первичного, а также встречного магнитных полей 4, 8 /4а, 8а/ и соответствующего увеличения потоков их магнитной индукции. Для подобных исполнений количество катушек возбуждения 16 / 16а/ более четырех нецелесообразно по соображениям разумной достаточности. На фиг. 4, 6 показана картина взаимодействия первичного 4 /4а/ и встречного 8 /8а/ магнитных полей с ограничительным магнитным полем 11 /11а/ по поверхности их соприкосновения 12 /12а/. Вследствие этого взаимодействия магнитных полей характеристика измерительного преобразователя подобного исполнения, показанная на диаграммах фиг. 5, 7 сплошной линией, по сравнению с показанной пунктирной линией приобретает строгое ограничение по ширине зоны обнаружения 10 и наиболее благоприятную форму, близкую к П-образной.
Описанный измерительный преобразователь во всех его исполнениях работает преимущественно с металлоискателем известного типа /фиг 8, 9, 10/, содержащим генератор 17 переменного тока звуковой частоты, входной усилитель 18, управляемый фазовращатель 19, синхронный детектор 20 и регистрирующее устройство 21. Измерительный преобразователь во время работы обращен к поверхности 1 исследуемой среды 2 своей рабочей поверхностью 14. Катушки возбуждения 3 /3а/, 7 /7а/, 16, /16а/ питаются от генератора 17 и возбуждают в исследуемой среде 2 и окружающем пространстве над ее поверхностью 1 соответствующие переменные магнитные поля 4 /4а/, 8 /8а/, 11 /11а/. Первичное магнитное поле 4 /4а/ действует только со стороны разграничительной плоскости симметрии 9, обращенной к поверхности 1 исследуемой среды 2, пронизывает ее и наводит в скрытых объектах, в случае их присутствия, вихревые токи, которые возбуждают вторичное магнитное поле, взаимодействующее с первичным с образованием результирующего магнитного поля, воспринимаемого приемными катушками 5 /5а/. Встречное магнитное поле 8 /8а/ действует только со стороны разграничительной плоскости симметрии 9, обращенной в противоположную по отношению к исследуемой среде 2 сторону, и, следовательно, не может воздействовать на скрытые в ней объекты. Ограничительное магнитное поле 11 /11а/ /при его наличии/ хотя и пронизывает исследуемую среду 2, но любая из приемных катушек для него недосягаема. Следовательно, полезную информацию несет только сигнал, наведенный в приемных катушках 5 /5а/. Благодаря встречно-последовательному включению парных приемных катушек 5, 6 /5а, 6а/ осуществляется сравнение /вычитание/ наведенных в них сигналов и, вследствие взаимного уничтожения практически одинаковых по величине и знаку сигналов собственных и внешних помех, выделяется разностный полезный сигнал. Он подается на входной усилитель 18, а усиленный сигнал с его выхода подается на сигнальный вход синхронного детектора 20. На управляющий вход последнего подается также сигнал от управляемого фазовращателя 19, опорный сигнал к которому подводится от генератора 17. Регистрирующее устройство 21, подсоединенное к выходу синхронного детектора 20, индицирует величину и знак выходного сигнала металлоискателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик | 1981 |
|
SU1007052A1 |
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| ГИБРИДНЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДПОВЕРХНОСТНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ | 2019 |
|
RU2743495C1 |
| СПОСОБ БИФАКТОРНОГО ВОЗБУЖДЕНИЯ ФЕРРОЗОНДОВ И УСТРОЙСТВО МОДУЛЯТОРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2809738C1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1998 |
|
RU2136021C1 |
| МУЛЬТИПЛИЦИРОВАННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДПОВЕРХНОСТНЫХ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ | 2021 |
|
RU2782902C1 |
| ИНДУКЦИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МЕТАЛЛОИСКАТЕЛЯ | 2004 |
|
RU2262123C1 |
| СПОСОБ ИНДУКЦИОННОГО КАРОТАЖА ИЗ ОБСАЖЕННЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614853C2 |
| УНИВЕРСАЛЬНЫЙ ВИХРЕТОКОВЫЙ ИМПУЛЬСНЫЙ МЕТАЛЛОИСКАТЕЛЬ | 2013 |
|
RU2559796C2 |
| Накладной вихретоковый преобразователь с вращающимся полем | 1986 |
|
SU1415166A1 |

Использование: в металлоискателях для целей геологоразведки, археологии, криминалистики, контроля при досмотрах и т.п. Сущность изобретения: синхронно возбуждают два симметричных встречных переменных магнитных поля, взаимодействующих по разграничительной плоскости симметрии, параллельной поверхности исследуемой среды. Раздельно воспринимают с помощью пары разнесенных приемных катушек соответствующие результирующие магнитные поля. Сравнивают наведенные в приемных катушках сигналы и выделяют разностный полезный сигнал. Измерительный преобразователь для осуществления этого способа (фиг. 1) содержит корпус (13) с рабочей поверхностью (14), в котором установлены пара соединенных встречно катушек возбуждения (3, 7), общая ось которых нормальна к рабочей поверхности (14) корпуса (13), и пара соединенных встречно-последовательно приемных катушек (5, 5а; 6, 6а), расположенных попарно-симметрично по обе стороны от разграничительной поверхности симметрии. Изобретение позволяет повысить эффективность обнаружения скрытых объектов благодаря повышению уровня полезного сигнала и его независимости от характера распределения скрытых объектов в иследуемой среде. 2 с. и 5 з.п.ф-лы, 10 ил.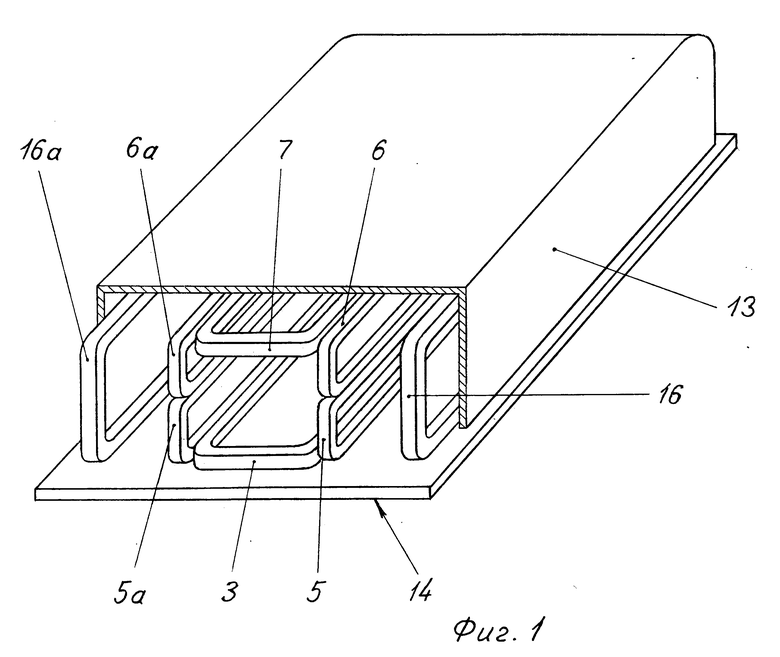
| SU, авторское свидетельство, 1712927, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
