Изобретение относится к информационно-измерительной технике, в частности к средствам индикации и контроля линейных виброускорений, и может быть использовано в устройствах и системах виброакустической диагностики.
Любая система контроля вибрации содержит два блока:
- первичный измерительный преобразователь (вибродатчик) - блок, предназначенный для измерения вибрации путем преобразования механического вибрационного движения в электрический информационный сигнал;
- вторичный измерительный преобразователь - электронный блок для принятия и обработки информационного сигнала и вывода информации по внешнему интерфейсу.
Очевидно, что чувствительность и точность системы контроля вибрации определяется параметрами обоих указанных блоков, причем в первую очередь возможностями блока измерения параметров вибрации.
Существуют два принципа измерения вибрации: кинематический и динамический [Приборы и системы для измерения вибрации, шума и удара. Справочник. В 2-х кн. Кн. 1 / под ред. В.В. Клюева. - М.: Машиностроение, 1978, стр. 38]. При реализации кинематического принципа измеряют координаты точек объекта относительно выбранной неподвижной системы координат (измерение относительной вибрации). В сущности, в этом случае измеряют вибрацию одного объекта относительно другого, принятого за неподвижный. При динамическом принципе параметры вибрации измеряют относительно искусственно созданной неподвижной системы отсчета, в большинстве случаев инерционного элемента, связанного с объектом через упругий подвес (измерение абсолютной вибрации).
Известны кинематические способы и устройства измерения вибрации, основанные на оптическом контроле сигналов, получаемых с вибрирующего объекта. Для их реализации используют источник излучения, приемную оптическую схему и электронную схему обработки данных. Колебания отражающей поверхности модулируют частотный сдвиг, а посредством электронной обработки этого сигнала модуляции получают параметры вибрационных колебаний. К недостаткам этих способов и устройств следует отнести их сложность, громоздкость и высокую стоимость, необходимость юстировки и настройки, требующих больших затрат времени, большое энергопотребление, высокие требования к качеству поверхности исследуемого объекта, а также невысокую точность, обусловленную вибрацией конструктивных элементов, образующих измерительный узел.
Поэтому на практике наиболее предпочтительными являются динамические способы и устройства измерения вибрации, работающие на принципе перемещения инерционной массы при изменении величины ускорения контролируемого объекта и генерирования электрического сигнала, пропорционального величине ускорения контролируемого объекта.
Известен динамический способ измерения ускорения, заключающийся в том, что измерения осуществляют относительно искусственной неподвижной системы отсчета, в качестве которой используют металлический инерционный элемент, который устанавливают с возможностью осевых упругих перемещений относительно первой и второй измерительных катушек, неподвижных относительно контролируемого объекта, причем инерционный элемент устанавливают с зазорами относительно стопоров из магнитного материала, располагаемых на торцах магнитного корпуса, который закрепляют на контролируемый объект, посредством первого и второго элементов возбуждения, выполненных в виде многовитковых катушек, возбуждают магнитный поток, который замыкают по магнитной цепи «инерционный магнитный элемент - воздушные зазоры между инерционной магнитной массой и магнитным корпусом - магнитный корпус», данным магнитным потоком в первой и второй неподвижных измерительных катушках индуцируют ЭДС, величины которых зависят от величин указанных воздушных зазоров, изменяющихся при осевом перемещении инерционного элемента относительно измерительных катушек, пропорциональном ускорению контролируемого объекта, регистрируют указанные ЭДС и определяют разностную величину между ними, являющуюся информационным сигналом [Патент US 5220834, G01P 3/488, 22.06.1993].
Вибродатчик для реализации данного динамического способа измерения виброускорения содержит корпус из магнитного материала и подвижный металлический инерционный элемент, установленный внутри корпуса и поддерживаемый упругим подвесом в виде плоской листовой пружины, закрепленной на корпусе, два стопора из магнитного материала, расположенные в торцевых частях корпуса с зазорами относительно концов подвижного инерционного элемента, первый и второй элементы возбуждения, выполненные в виде многовитковых катушек, первую и вторую измерительные катушки с встречно-последовательно включенными обмотками, причем внутри катушек возбуждения и измерительных катушек коаксиально расположен подвижный инерционный элемент.
Недостатками данного динамического способа измерения ускорения и вибродатчика для его реализации являются сложность конструкции, а также недостаточные метрологические свойства. Это обусловлено выполнением первого и второго элементов возбуждения в виде многовитковых катушек, собственные параметры которых в значительной степени зависят от их температуры и других внешних дестабилизирующих факторов, которые могут изменяться в процессе измерения, что существенно снижает точность измерений в целом.
Наличие индуктивных и емкостных паразитных связей, обусловленных конструктивными особенностями компоновки набора индуктивных элементов в виде соответствующих катушек, является дополнительным ухудшающим фактором влияния, как на чувствительность вибродатчика, так и на точность самих измерительных преобразований.
Дополнительные конструктивные элементы в виде стопоров требуют особой точности изготовления, связанной с необходимостью обеспечения требуемой величины зазоров и их зеркальной пространственной симметрии, что само по себе является непростой технологической задачей
Наиболее близким к изобретению по совокупности существенных признаков является динамический способ измерения виброускорения, реализованный в вибродатчике, описанном в патенте US 5359894, G01P 15/11, 01.11.1994, принятый за прототип.
Известный динамический способ измерения виброускорения заключается в том, что измерения осуществляют относительно искусственной неподвижной системы отсчета, в качестве которой используют металлический инерционный элемент, элементами возбуждения в процессе измерения создают переменные физические поля в виде переменных магнитных полей, которыми воздействуют на обмотки измерительных катушек, инициируя при этом в них эффект электромагнитной индукции, проявляющийся в возникновении на обмотках этих катушек соответствующих информационных электрических сигналов в виде ЭДС индукции, регистрируют эти электрические сигналы и определяют их разность, пропорциональную ускорению контролируемого объекта.
Вибродатчик для реализации данного динамического способа измерения виброускорения объекта содержит корпус из магнитного материала и подвижный инерционный элемент, установленный внутри корпуса и поддерживаемый упругим подвесом в виде как минимум двух плоских листовых пружин, одни концы которых закреплены на корпусе, а вторые концы закреплены на торцах инерционного элемента, корпус содержит цилиндрическую часть и две чашеобразные крышки, закрывающие отверстия на обоих концах корпуса, причем инерционный элемент установлен с зазорами относительно указанных крышек, первый и второй элементы возбуждения, выполненные в виде многовитковых катушек, первую и вторую измерительные катушки с встречно-последовательно включенными обмотками, причем подвижный инерционный элемент установлен внутри катушек возбуждения и измерительных катушек коаксиально по отношению к ним.
Недостатки данного динамического способа измерения ускорения и вибродатчика для его реализации такие же, как и в предыдущем случае, а именно, сложность конструкции и недостаточные метрологические свойства. Это обусловлено выполнением первого и второго элементов возбуждения в виде многовитковых катушек, собственные параметры которых в значительной степени зависят от внешних дестабилизирующих факторов, которые могут изменяться в процессе контроля. За счет этого возникает аддитивная помеха в виде смещения нулевого сигнала, что существенно снижает точность измерений в целом.
Пространственное расположение возбуждающих катушек относительно измерительных катушек способствует увеличению индуктивных и емкостных паразитных связей, что в итоге негативно сказывается на чувствительности датчика.
Технической задачей изобретения является упрощение конструкции и повышение точности измерения, увеличение чувствительности и помехоустойчивости.
Технический результат достигается тем, что в известном динамическом способе, заключающимся в том, что измерения осуществляют относительно искусственной неподвижной системы отсчета, в качестве которой используют инерционный элемент, закрепленный на упругом подвесе относительно контролируемого объекта, элементами возбуждения создают переменные физические поля, которыми воздействуют на обмотки измерительных катушек, инициируя в них соответствующий физический эффект, проявляющийся в возникновении на обмотках этих катушек соответствующих ЭДС, и определяют их разность, пропорциональную ускорению контролируемого объекта, согласно изобретению, в качестве элементов возбуждения используют металлические электроды, посредством которых создают переменные физические поля в виде переменных электрических полей, которыми воздействуют на нижний ряд витков электрических обмоток измерительных катушек, индуцируя тем самым в этих витках соответствующие заряды с переменными потенциалами, которые относительно нулевого потенциала общей точки соединения концов верхнего ряда витков обмоток измерительных катушек создают соответствующие разности потенциалов, посредством указанных разностей потенциалов возбуждают в электрических цепях измерительных катушек на частоте последовательного резонанса этих электрических цепей переменные электрические токи, за счет которых измерительными катушками создают в окружающем их пространстве соответствующие переменные магнитные поля, воздействуя которыми на инерционный элемент из немагнитного материала с высокой электропроводимостью инициируют появление в нем токовихревого эффекта, проявляющегося в появлении переизлученного переменного магнитного поля, которым воздействуют на измерительные катушки и наводят в их обмотках соответствующие ЭДС взаимной индукции, определяют разностную величину между ними, выделяют реактивную составляющую этой разностной величины, пропорциональную величине относительного перемещения контролируемого объекта и инерционного элемента, и вычисляют ускорение перемещения контролируемого объекта в абсолютной системе координат в соответствии с выражением:

где ΔUIm(t) - реактивная составляющая разностной величины между ЭДС взаимной индукции; ΔU'Im(t) и ΔU''Im(t) - первая и вторая производные реактивной составляющей ΔUIm(t); К0 - коэффициент измерительных преобразований;  - собственная циклическая частота колебаний массивного элемента; w - жесткость упругих элементов, m - масса инерционного элемента; β - степень затухания колебаний инерционного элемента.
- собственная циклическая частота колебаний массивного элемента; w - жесткость упругих элементов, m - масса инерционного элемента; β - степень затухания колебаний инерционного элемента.
При этом погрешность, вызванную наличием нулевого выходного сигнала, устраняют за счет предварительного перераспределения магнитного сопротивления в магнитной цепи измерительных катушек.
В датчике для реализации динамического способа измерения виброускорения, содержащем корпус из магнитного материала и подвижный инерционный элемент, установленный внутри корпуса и поддерживаемый упругим подвесом в виде плоской пружины, закрепленной на корпусе, первый и второй элементы возбуждения, первую и вторую измерительные катушки, неподвижные относительно контролируемого объекта, обмотки которых имеют встречно-последовательное включение, причем элементы возбуждения и измерительные катушки установлены внутри магнитного корпуса коаксиально по отношению к подвижному инерционному элементу, согласно изобретению, первый и второй элементы возбуждения выполнены в виде разрезных тонкостенных металлических цилиндров с длиной, равной конструктивной длине измерительных катушек, и неподвижно закреплены соответственно на внутренних поверхностях этих катушек, внутри корпуса вдоль его продольной оси расположен центральный стержень из магнитного материала, на всей длине которого коаксиально расположена тонкостенная диэлектрическая цилиндрическая втулка, на внешней поверхности которой коаксиально установлены первая и вторая измерительные катушки, подвижный инерционный элемент выполнен в виде кольца из материала с высокой электропроводимостью, расположенного коаксиально и симметрично относительно измерительных катушек в их внешнем пространстве.
Центральный вертикальный стержень имеет внутреннее сквозное резьбовое отверстие, в котором расположена втулка из магнитного материала с соответствующей резьбой, имеющая возможность принудительного перемещения вдоль резьбового отверстия, а корпус датчика выполнен из двух стандартных ферритовых броневых сердечников, соосно сопряженных своими торцевыми поверхностями.
Заявленные особенности динамического способа измерения виброускорения и конструктивного исполнения вибродатчика для его реализации обеспечивают необходимый уровень эффективности его работы и способствуют достижению поставленной задачи.
Предлагаемый динамический способ измерения виброускорения, конструкция вибродатчика и блок-схема устройства для реализации данного способа поясняется чертежами, где на фиг.1 показана структурная блок-схема реализации заявляемого динамического способа измерения виброускорения; на фиг.2 показана схема процедуры предварительного перераспределения магнитного сопротивления в магнитной цепи измерительных катушек; на фиг.3 показана конструкция датчика измерения виброускорения; на фиг.4 показан упругий подвес инерционного элемента датчика; на фиг.5 показана блок-схема устройства, реализующего динамический способ измерения виброускорения аппаратными средствами.
На фиг.1 обозначено: ИЭ - инерционный элемент; ИК1 и ИК2 - измерительные катушки; Э1 и Э2 - металлические электроды возбуждения; M1 и М2 - взаимные индуктивности между инерционной массой и соответствующими измерительными катушками; δ(t) - относительное перемещение инерционного элемента и вибрирующего объекта; g(t) - ускорение перемещения вибрирующего объекта в абсолютной системе координат; ПРЭС1 и ПРЭС2 - процедуры регистрации электрических сигналов на соответствующих обмотках измерительных катушках ИК1 и ИК2; ПКД - процедура квадратурного детектирования; ПВКП - процедура вычисления контролируемого параметра g(t);  - переменный потенциал заряда на Э1 и Э2, создаваемый активным выходом генератора возбуждения; ϕ0 - нулевой потенциал пассивного выходом генератора возбуждения;
- переменный потенциал заряда на Э1 и Э2, создаваемый активным выходом генератора возбуждения; ϕ0 - нулевой потенциал пассивного выходом генератора возбуждения;  - напряженности переменных электрических полей, создаваемых электрическими зарядами металлических электродов возбуждения;
- напряженности переменных электрических полей, создаваемых электрическими зарядами металлических электродов возбуждения;  - переменные электрические потенциалы индуцированных зарядов на витках нижнего ряда обмоток соответственно ИК1 и ИК2;
- переменные электрические потенциалы индуцированных зарядов на витках нижнего ряда обмоток соответственно ИК1 и ИК2;  - суммарные первый и второй электрические сигналы на соответствующих обмотках ИК1 и ИК2;
- суммарные первый и второй электрические сигналы на соответствующих обмотках ИК1 и ИК2;  - разностная величина между электрическими сигналами
- разностная величина между электрическими сигналами  ΔUIm(t) - реактивная составляющая разностной величины напряжений
ΔUIm(t) - реактивная составляющая разностной величины напряжений  К0 - коэффициент измерительного преобразования; К1=2×ω0×β и
К0 - коэффициент измерительного преобразования; К1=2×ω0×β и  - постоянные коэффициенты;
- постоянные коэффициенты;  - собственная циклическая частота колебаний ИЭ, w - жесткость упругих элементов, m - масса инерционного элемента, β - степень затухания колебаний ИЭ.
- собственная циклическая частота колебаний ИЭ, w - жесткость упругих элементов, m - масса инерционного элемента, β - степень затухания колебаний ИЭ.
Предлагаемый динамический способ измерения виброускорения осуществляют следующим образом.
Посредством металлических электродов Э1 и Э2 из немагнитного материала, обладающих зарядом с переменным потенциалом  , изменяющимся по синусоидальному закону, создают переменные электрические поля, которыми наводят на витках нижнего ряда обмоток каждой измерительной катушек ИК1 и ИК2 заряды с соответствующими переменными потенциалами
, изменяющимся по синусоидальному закону, создают переменные электрические поля, которыми наводят на витках нижнего ряда обмоток каждой измерительной катушек ИК1 и ИК2 заряды с соответствующими переменными потенциалами  относительно нулевого потенциала ϕ0=0 объединенных концов верхнего ряда этих обмоток, создавая при этом между концами обмоток каждой измерительной катушки соответствующие разности потенциалов, равные (см. фиг.1):
относительно нулевого потенциала ϕ0=0 объединенных концов верхнего ряда этих обмоток, создавая при этом между концами обмоток каждой измерительной катушки соответствующие разности потенциалов, равные (см. фиг.1):

Под воздействием созданных разностей потенциалов  соответственно в электрических цепях каждой из обмоток измерительных катушек ИК1 и ИК2 возбуждают на частоте последовательного резонанса ω этих электрических цепей соответствующие электрические переменные токи
соответственно в электрических цепях каждой из обмоток измерительных катушек ИК1 и ИК2 возбуждают на частоте последовательного резонанса ω этих электрических цепей соответствующие электрические переменные токи  посредством которых в окружающем пространстве первой и второй измерительных катушек ИК1 и ИК2 создают соответствующие переменные магнитные поля, которыми воздействуют на инерционный элемент ИЭ из немагнитного электропроводящего материала, инициируя тем самым появление в нем вихревых токов
посредством которых в окружающем пространстве первой и второй измерительных катушек ИК1 и ИК2 создают соответствующие переменные магнитные поля, которыми воздействуют на инерционный элемент ИЭ из немагнитного электропроводящего материала, инициируя тем самым появление в нем вихревых токов  Режим резонансного возбуждения электрических токов
Режим резонансного возбуждения электрических токов  является тем необходимым условием, при котором
является тем необходимым условием, при котором 
Вихревыми токами возбуждают переизлученные (вторичные) переменные магнитные поля, которыми воздействуют на измерительные катушки ИК1 и ИК2 и наводят в них соответствующие ЭДС взаимной индукции.
Осуществляют процедуры регистрации (ПРЭС1 и ПРЭС2) первого и второго суммарных электрических сигналов на соответствующих обмотках первой и второй измерительных катушек:


где  - электрические напряжения, возникающие соответственно на обмотках первой и второй измерительных катушек в результате протекания в них возбужденных переменных электрических токов
- электрические напряжения, возникающие соответственно на обмотках первой и второй измерительных катушек в результате протекания в них возбужденных переменных электрических токов  R1=R2=R - активные сопротивления обмоток соответственно первой и второй измерительных катушек; L1=L2=L=μ×w2×l/S - индуктивности соответственно первой и второй измерительных катушек ИК1 и ИК2; μ - магнитная проницаемость магнитопровода; w, l и S - соответственно количество витков, длина измерительных катушек и площадь их внутреннего сечения;
R1=R2=R - активные сопротивления обмоток соответственно первой и второй измерительных катушек; L1=L2=L=μ×w2×l/S - индуктивности соответственно первой и второй измерительных катушек ИК1 и ИК2; μ - магнитная проницаемость магнитопровода; w, l и S - соответственно количество витков, длина измерительных катушек и площадь их внутреннего сечения;  - ЭДС взаимной индукции, наведенные соответственно в обмотках первой и второй измерительных катушек ИК1 и ИК2 в результате электродинамического взаимодействия между инерционным элементом ИЭ и каждой измерительной катушкой.
- ЭДС взаимной индукции, наведенные соответственно в обмотках первой и второй измерительных катушек ИК1 и ИК2 в результате электродинамического взаимодействия между инерционным элементом ИЭ и каждой измерительной катушкой.
Определяют разностную величину  между электрическими сигналами
между электрическими сигналами  и
и  :
:

где  - результирующая ЭДС взаимной индукции.
- результирующая ЭДС взаимной индукции.
Величина  зависит от положения ИЭ:
зависит от положения ИЭ:
- в исходном положении, при отсутствии вибрации и, соответственно, при неподвижном и симметричном положении ИЭ относительно измерительных катушек ИК1 и ИК2, будет  , следовательно,
, следовательно, 
- при периодических пространственных смещениях ИЭ относительно исходного положения вследствие вибрации будет  и, соответственно,
и, соответственно, 
Затем осуществляют процедуру квадратурного детектирования и регистрируют реактивную составляющую ΔUIm(t) разностной величины напряжений  пропорциональную величине перемещения массивного элемента ИЭ относительно измерительных катушек ИК1 и ИК2.
пропорциональную величине перемещения массивного элемента ИЭ относительно измерительных катушек ИК1 и ИК2.
После этого, посредством процедуры вычисления контролируемого параметра ПВКП, определяют ускорение перемещения контролируемого объекта в абсолютной системе координат в соответствии с выражением:

где ΔUIm(t) - реактивная составляющая разностной величины между ЭДС взаимной индукции; ΔU'Im(t) и ΔU''Im(t) - первая и вторая производные реактивной составляющей ΔUIm(t); К0 - коэффициент измерительных преобразований;  - собственная циклическая частота колебаний массивного элемента; w - жесткость упругих элементов, m - масса инерционного элемента; β - степень затухания колебаний инерционного элемента.
- собственная циклическая частота колебаний массивного элемента; w - жесткость упругих элементов, m - масса инерционного элемента; β - степень затухания колебаний инерционного элемента.
Следует отметить, что поскольку измерительные катушки ИК1 и ИК2 неподвижны относительно контролируемого объекта, то первая производная ΔU'Im(t) и вторая производная ΔU''Im(t) пропорциональны соответственно относительной скорости и ускорению этого объекта, вызванными его вибрацией.
Погрешность, вызванную наличием нулевого выходного сигнала, устраняют за счет реализации специальной процедуры предварительного перераспределения магнитного сопротивления в магнитной цепи измерительных катушек путем принудительного осевого перемещения дополнительного ферритового стержня ФС во внутреннем пространстве измерительных катушек ИК1 и ИК2 (фиг.2).
Для более полного понимания сути предлагаемого способа динамического измерения виброускорения рассмотрим особенности физических эффектов, на которых он основывается.
Для существующей взаимосвязи между ИК1 и ИЭ в соответствии со вторым законом Кирхгофа можем записать следующую систему аналитических выражений:

где  и r0 - индуктивность и активное сопротивление инерционного элемента ИЭ в виде элементарного витка;
и r0 - индуктивность и активное сопротивление инерционного элемента ИЭ в виде элементарного витка;  - вихревой ток, наводимый в ИЭ магнитным полем ИК1; μ0 - магнитная проницаемость инерционного элемента ИЭ; d0 и l0 - соответственно диаметр и длина инерционного элемента ИЭ.
- вихревой ток, наводимый в ИЭ магнитным полем ИК1; μ0 - магнитная проницаемость инерционного элемента ИЭ; d0 и l0 - соответственно диаметр и длина инерционного элемента ИЭ.
В результате совместного решения системы уравнений (1) получаем:

где  - модуль комплексного сопротивления инерционного элемента ИЭ.
- модуль комплексного сопротивления инерционного элемента ИЭ.
Аналогичным образом для существующей взаимосвязи между ИК2 и ИЭ можем записать следующую систему аналитических выражений:

В результате совместного решения системы уравнений (3) получаем:

Следует подчеркнуть, что режим последовательного резонансного возбуждения электрических токов  при котором получают
при котором получают  и
и  увеличивает величины
увеличивает величины  улучшая тем самым чувствительность предлагаемого способа динамического измерения виброускорения.
улучшая тем самым чувствительность предлагаемого способа динамического измерения виброускорения.
Определяем в соответствии с (2) и (4) и с учетом того, что  разностную величину между электрическими напряжениями
разностную величину между электрическими напряжениями

где 
 - коэффициент связи между ИЭ и ИК1;
- коэффициент связи между ИЭ и ИК1;  - коэффициент связи между ИЭ и ИК2; δ - линейное перемещение ИЭ относительно своего нейтрального положения,
- коэффициент связи между ИЭ и ИК2; δ - линейное перемещение ИЭ относительно своего нейтрального положения,  - часть длины измерительных катушек внутри ИЭ при его нейтральном положении, l0 - часть длина измерительных катушек вне ИЭ при его нейтральном положении; k0 - конструктивный коэффициент измерительных катушек.
- часть длины измерительных катушек внутри ИЭ при его нейтральном положении, l0 - часть длина измерительных катушек вне ИЭ при его нейтральном положении; k0 - конструктивный коэффициент измерительных катушек.
В обобщенном варианте уравнение (5) можно представить в виде следующего выражения:

Из анализа выражения (5) следует, что наиболее чувствительным компонентом  к измеряемому параметру δ является его мнимая составляющая
к измеряемому параметру δ является его мнимая составляющая  Поэтому для дальнейшего контроля вибрационных параметров регистрируют только реактивную составляющую ΔUIm(t) разностной величины напряжений
Поэтому для дальнейшего контроля вибрационных параметров регистрируют только реактивную составляющую ΔUIm(t) разностной величины напряжений  пропорциональную величине относительного перемещения вибрирующего объекта и инертного элемента:
пропорциональную величине относительного перемещения вибрирующего объекта и инертного элемента:

где К0 - коэффициент измерительного преобразования.
Из выражения (7) получаем необходимую зависимость:

Следует отметить, что для линейного перемещения инерционного элемента уравнение динамического равновесия имеет следующий вид:

где g - ускорение перемещения корпуса акселерометра в абсолютной системе координат;  - собственная циклическая частота колебаний ИЭ; w - жесткость упругих элементов, m - масса инерционного элемента; β - степень затухания колебаний ИЭ.
- собственная циклическая частота колебаний ИЭ; w - жесткость упругих элементов, m - масса инерционного элемента; β - степень затухания колебаний ИЭ.
Тогда, осуществив необходимые процедуры, в соответствии с (8) и (9), получим:

Полученный результат представим в обобщенном виде:

где ΔUIm(t),  - сигналы, пропорциональные, соответственно, относительному перемещению δ, скорости и ускорению инерционного элемента ИЭ относительно измерительных катушек ИК1 и ИК2, которые, как было показано выше, являются параметрами, характеризующими вибрацию контролируемого объекта.
- сигналы, пропорциональные, соответственно, относительному перемещению δ, скорости и ускорению инерционного элемента ИЭ относительно измерительных катушек ИК1 и ИК2, которые, как было показано выше, являются параметрами, характеризующими вибрацию контролируемого объекта.
Таким образом, полученное выражение (11), основанное на анализе всех физических процессов, подтверждает состоятельность предлагаемого динамического способа измерения виброускорения и описывает все его структурные элементы.
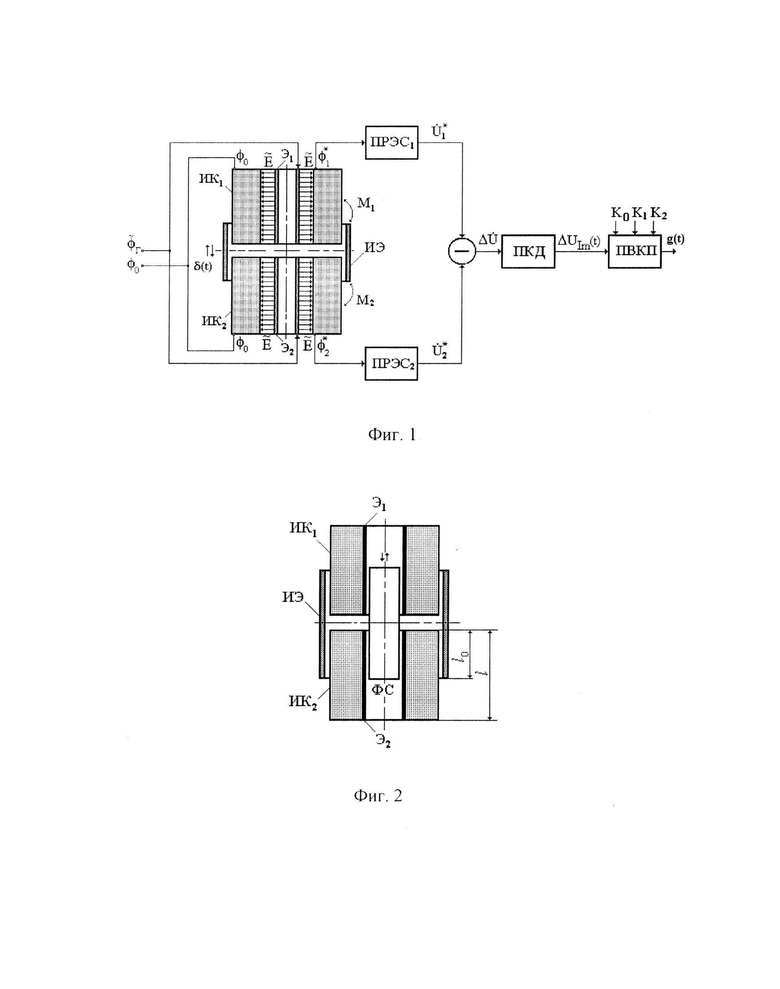
Датчик для измерения виброускорения (фиг.3) содержит: 1 и 2 - ферритовые броневые сердечники; 3 - резьбовой ферритовой стержень (ФС); 4 и 5 - измерительные катушки; 6 - диэлектрическая втулка в виде тонкостенного цилиндра; 7 и 8 - металлические электроды возбуждения в виде разрезных тонкостенных цилиндров; 9 - инерционный элемент в виде металлического кольца; 10 - упругий подвес в виде плоской мембраны из бериллиевой бронзы.
Конструктивные элементы 1, 2 и 3 в своей совокупности образуют разъемный магнитопровод вибродатчика (ВД), на внутренней центральной части которого коаксиально соответственно располагаются измерительные катушки 4 и 5, диэлектрическая втулка 6 и электроды возбуждения 7 и 8. При этом ферритовый резьбовой стержень 3, имеющий возможность микрометрических осевых перемещений относительно измерительных катушек 4 и 5, помимо центрирующей функции выполняет на стадии подготовки ВД к работе роль балансировочного элемента, влияющий на начальные параметры измерительных катушек 4 и 5. Инерционный элемент 9 в виде металлического экрана закреплен на упругом подвесе 10 и имеет возможность под действием вибраций совершать осевые перемещения относительно катушек 4 и 5.
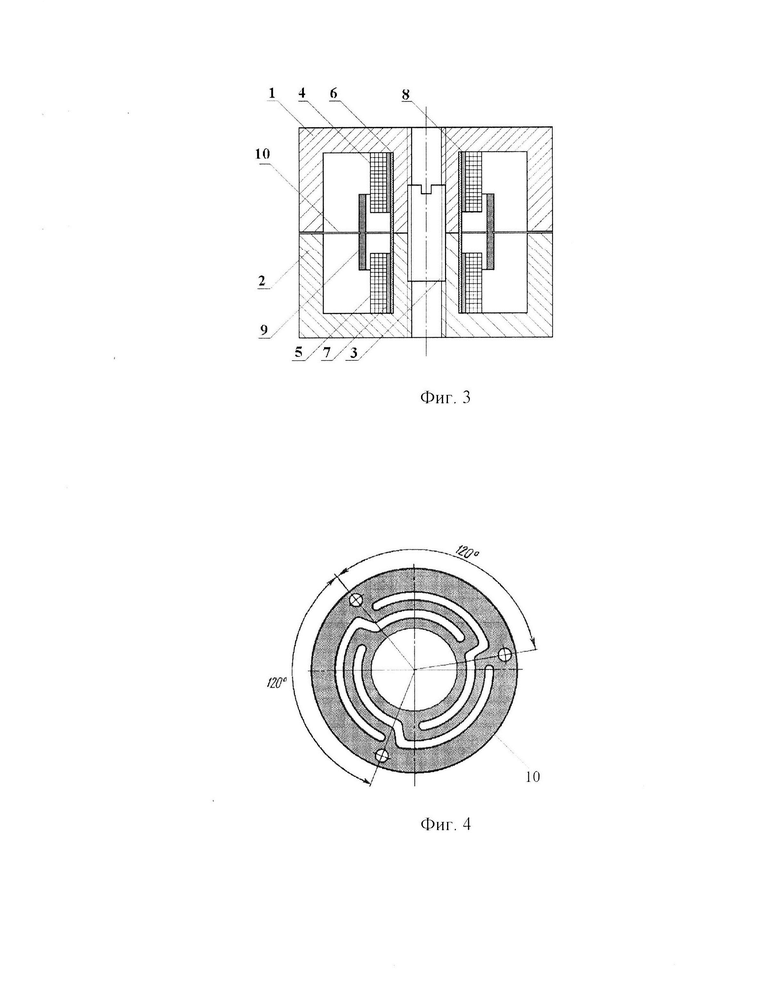
Следует отметить, что упругий подвес 10 (фиг.4) выполнен в виде мембраны и является подвесом с направленным ходом инерционного элемента, где направляющие элементы являются частью самого подвеса. Упругий подвес жестко фиксируется на торцевой поверхности одного из ферритовых броневых сердечников 1 и 2 посредством трех установочных отверстий, что обеспечивает нейтральное пространственное положение инерционного элемента 9 относительно измерительных катушек 4 и 5.
Датчик фактически реализует предлагаемый способ измерения виброускорения. Рассмотрим основные особенности его функционирования.
Металлическими электродами Э1 и Э2 с зарядами с переменным потенциалом, изменяющимся по синусоидальному закону, создают переменные электрические поля, которыми наводят на витках нижнего ряда обмоток каждой измерительной катушек ИК1 и ИК2 заряды с соответствующими переменными потенциалами. При этом концы верхнего ряда обмоток измерительной катушек ИК1 и ИК2 имеют общую точку соединения с нулевым потенциалом. В этом случае между концами обмоток каждой измерительной катушки возникает соответствующая разность потенциалов, которая приводит к возбуждению в каждой из электрических обмоток измерительных катушек соответствующего электрического переменного тока. Посредством этих электрических токов во внутреннем пространстве ВД, ограниченном ферритовыми броневыми сердечниками 1 и 2, создаются соответствующие переменные магнитные поля, наводящие в инерционном элементе 9 вихревые токи. Эти вихревые токи, в свою очередь, возбуждают переизлученные (вторичные) переменные магнитные поля, инициирующие процесс взаимоиндукции между соответствующей измерительной катушкой 4, 5 и инерционным элементом 9.
При нейтральном пространственном положении инерционного элемента 9 эти процессы являются равно подобными, т.к. выполняется теорема Кирпичева-Гухмана, определяющая следующие условия подобия: 1 - подобные процессы должны быть качественно одинаковыми, т.е. описываться одинаковыми дифференциальными уравнениями и иметь одну физическую природу; 2 - условия однозначности подобных процессов должны быть одинаковыми, кроме численных значений постоянных, содержащихся в них; 3 - одноименные определяющие критерии подобных процессов должны иметь одинаковую численную величину.
В этом случае и с учетом того, что критерием подобия процессов взаимоиндукции являются взаимные индуктивности между соответствующей измерительной катушкой 4, 5 и инерционным элементом 9, разница потенциалов между одноименными входными концами (они же информационные выходы) обмоток измерительных катушек 4,5 будет равна нулю.
При осевом смещении инерционного элемента 9, вызванного вибрационными возмущениями, нарушается третье условие теоремы подобия процессов, что приводит к возникновению уже существенной разницы потенциалов между одноименными входными концами обмоток измерительных катушек. При этом характер смещения инерционного элемента 9 будет адекватным образом отражаться в законе изменения разницы потенциалов между одноименными входными концами обмоток измерительных катушек 4, 5, в соответствии с которым в дальнейшем и определяются параметры вибрационного возмущения.
Корпус датчика для измерения вибрации может быть выполнен из двух стандартных ферритовых броневых сердечников 1,2, соосно сопряженных своими торцевыми поверхностями. Это упрощает технологию изготовления датчика и снижает, соответственно, его стоимость.
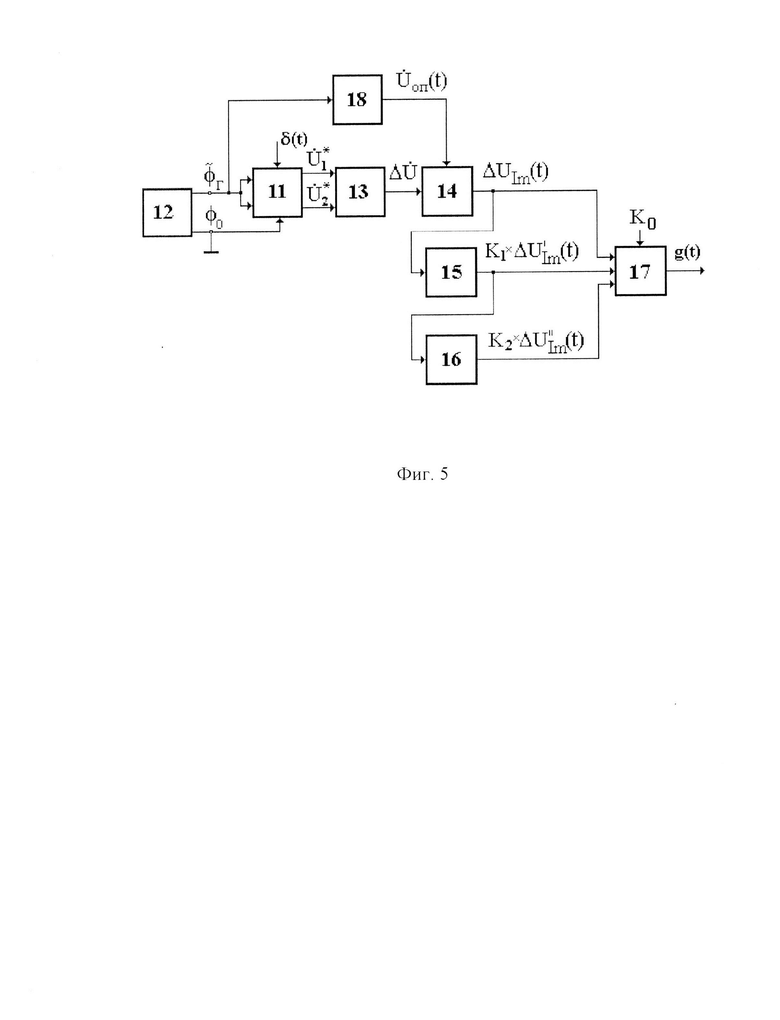
Вариант устройства в виде его блок-схемы, реализующего в наиболее полной мере возможности предлагаемого динамического способа измерения виброускорения аппаратными средствами, представлен на фиг.5.
Фактически данное устройство состоит из первичного измерительного преобразователя (ПИП) в виде датчика 11 для измерения кажущегося ускорения и вторичного измерительного преобразователя (ВИЛ), образованного совокупностью следующих функциональных блоков: 12 - электрический генератор; 13 -инструментальный усилитель; 14 - квадратурный детектор; 15 - первый блок дифференцирования с масштабированием; 16 - второй блок дифференцирования с масштабированием; 17 - блок суммирования с масштабированием; 18 - фазовращатель.
Данная блок-схема показывает реализацию посредством ПИП и ВИП последовательных процедур, лежащих в основе предложенного способа динамического способа измерения виброускорения.
Из представленной блок-схемы видно, что после процесса возбуждения датчика 11 посредством электрического генератора 12 на выходе вибродатчика 11 регистрируют первый  и второй
и второй  электрические сигналы. Каждый из этих сигналов представляет собой сумму двух составляющих, первая из которых является напряжением, возникающим на обмотке соответствующей измерительной катушки 4, 5 в результате протекания в ней возбужденного переменного электрического тока, а вторая составляющая представляет собой ЭДС взаимной индукции, наведенную соответственно на обмотке этой измерительной катушки 4,5 в результате ее электродинамического взаимодействия с инерционным элементом 9. В инструментальном усилителе 13 эти сигналы усиливаются и вычитаются и полученная разностная величина
электрические сигналы. Каждый из этих сигналов представляет собой сумму двух составляющих, первая из которых является напряжением, возникающим на обмотке соответствующей измерительной катушки 4, 5 в результате протекания в ней возбужденного переменного электрического тока, а вторая составляющая представляет собой ЭДС взаимной индукции, наведенную соответственно на обмотке этой измерительной катушки 4,5 в результате ее электродинамического взаимодействия с инерционным элементом 9. В инструментальном усилителе 13 эти сигналы усиливаются и вычитаются и полученная разностная величина  подается на квадратурный детектор 14, где из нее в соответствии с опорным напряжением Uоп(t), получаемого при помощи фазовращателя 18, выделятся реактивная составляющая ΔUIm(t). Затем полученный сигнал ΔUIm(t) дважды дифференцируют при помощи первого блока дифференцирования с масштабированием 15 и второго блока дифференцирования с масштабированием 16, на выходе которых получаются соответственно, сигналы К1×ΔU'Im(t) и К2×ΔU''Im(t). После этого блоком суммирования с масштабированием 17 определяется ускорение перемещения g(t) контролируемого объекта в абсолютной системе координат в соответствии с выражением:
подается на квадратурный детектор 14, где из нее в соответствии с опорным напряжением Uоп(t), получаемого при помощи фазовращателя 18, выделятся реактивная составляющая ΔUIm(t). Затем полученный сигнал ΔUIm(t) дважды дифференцируют при помощи первого блока дифференцирования с масштабированием 15 и второго блока дифференцирования с масштабированием 16, на выходе которых получаются соответственно, сигналы К1×ΔU'Im(t) и К2×ΔU''Im(t). После этого блоком суммирования с масштабированием 17 определяется ускорение перемещения g(t) контролируемого объекта в абсолютной системе координат в соответствии с выражением:

где К0 - коэффициент измерительных преобразований; К1=2×ω0×β и  - постоянные коэффициенты,
- постоянные коэффициенты, 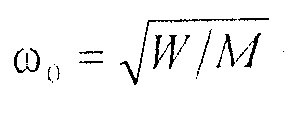 собственная циклическая частота колебаний инерционного элемента 9; W - жесткость упругих элементов, М - масса инерционного элемента 9; β - степень затухания колебаний инерционного элемента.
собственная циклическая частота колебаний инерционного элемента 9; W - жесткость упругих элементов, М - масса инерционного элемента 9; β - степень затухания колебаний инерционного элемента.
Для определения ускорение перемещения g(t) предварительно в блок 17 вводится постоянный коэффициент К0, а в блоках 15 и 16 определенным образом выставляются постоянные коэффициенты, соответственно К1 и К2.
Предлагаемые динамический способ измерения виброускорения и датчик для его реализации обладает перед существующими аналогами следующими преимуществами:
1 - повышенной чувствительностью, т.к. функционируют в режиме собственных последовательных резонансов измерительных катушек;
2 - технологичностью и простотой конструкции, которые обеспечиваются отсутствием многовитковых кашек возбуждения и использованием стандартных видов магнитопровода (ферромагнитные броневые сердечники);
3 - повышенной надежностью функционирования, обусловленной высокой температурной и временной стабильностью рабочих характеристик за счет использования своих конструктивных особенностей;
4 - расширенными функциональными возможностями, которые легко реализуются, например, благодаря использованию инерционного элемента в виде замкнутого электропроводящего кольца и простой процедуры замены упругою подвеса в виде мембраны на торсионный подвес, позволяющей регистрировать уже и угловые перемещения.
5 - сравнительно высокой точностью преобразования за счет повышенной помехозащищенности.
Совместное использование предлагаемого варианта ВД, микропроцессорных и цифровых технологий создаст необходимые условия для разработки в дальнейшем более совершенной виброакустической портативной системы, ориентированной на алгоритмическую обработку и детальный анализ полученной информации, что значительно повысит надежность оперативной оценки оборудования, в котором могут развиваться те или иные опасные процессы, связанные с вибрационными процессами.
Кроме того, в связи с тем, что контролируемое оборудование работает рядом с другим работающими механическими устройствами, являющимися источниками вибрации, в контролируемом оборудовании возникают дополнительные внутренние механические напряжения, приводящие к появлению дополнительных шумовых полей звукового диапазона частот (10÷104 Гц). Поэтому возможно эффективное применение предлагаемого варианта ВД также для регистрации интенсивности и частотного спектра уже этих шумовых полей виброакустической эмиссии, что, в свою очередь, позволит получить ценную дополнительную информацию.
Следует отметить, что разработанный вибродатчик с токовихревым преобразованием может быть использован для решения задач вибрационного контроля при изготовлении, монтаже, наладке, ремонте или исследованиях любых машин и механизмов, работа которых сопровождается возникновением механических колебаний и вибраций. Кроме того, он может использоваться также для задач спектральной сейсморазведки и задач инженерной геологии.
Результаты предварительных экспериментальных исследований подтвердили эффективность предложенного динамического способа контроля виброускорения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774268A1 |
| УСТРОЙСТВО КОНТРОЛЯ ГАЗА В ЖИДКОМЕТАЛЛИЧЕСКОМ ТЕПЛОНОСИТЕЛЕ | 2010 |
|
RU2426111C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЙ, ВОЗНИКАЮЩИХ В ЭЛЕКТРОУСТАНОВКАХ | 2023 |
|
RU2829713C1 |
| Устройство для контроля многокомпонентных перемещений | 1980 |
|
SU896657A1 |
| СПОСОБ БИФАКТОРНОГО ВОЗБУЖДЕНИЯ ФЕРРОЗОНДОВ И УСТРОЙСТВО МОДУЛЯТОРА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2022 |
|
RU2809738C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2491555C2 |
| УСТРОЙСТВО ЭКСПРЕСС-КОНТРОЛЯ МАГНИТНЫХ ХАРАКТЕРИСТИК ЛИСТОВОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ | 2014 |
|
RU2551639C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2011 |
|
RU2485439C2 |
Изобретение относится к испытательной технике, в частности к средствам индикации и контроля линейных виброускорений, и может быть использовано в устройствах и системах виброакустической диагностики. Измерения виброускорения осуществляют относительно искусственной неподвижной системы отсчета, в качестве которой используют инерционный элемент, закрепленный на упругом подвесе относительно контролируемого объекта, элементами возбуждения создают переменные физические поля, которыми воздействуют на обмотки измерительных катушек, инициируя в них соответствующий физический эффект, проявляющийся в возникновении на обмотках этих катушек соответствующих ЭДС, и определяют их разность, пропорциональную ускорению контролируемого объекта. В качестве элементов возбуждения используют металлические электроды, посредством которых создают переменные физические поля в виде переменных электрических полей, которыми воздействуют на нижний ряд витков электрических обмоток измерительных катушек. Создают в окружающем их пространстве соответствующие переменные магнитные поля, воздействуя которыми на инерционный элемент из немагнитного материала с высокой электропроводимостью инициируют появление в нем токовихревого эффекта, проявляющегося в появлении переизлученного переменного магнитного поля, которым воздействуют на измерительные катушки и наводят в их обмотках соответствующие ЭДС взаимной индукции, определяют разностную величину между ними, выделяют реактивную составляющую этой разностной величины, пропорциональную величине относительного перемещения контролируемого объекта и инерционного элемента, и вычисляют ускорение перемещения контролируемого объекта в абсолютной системе координат по формуле. Датчик содержит корпус из магнитного материала и подвижный инерционный элемент, установленный внутри корпуса и поддерживаемый упругим подвесом в виде плоской пружины, закрепленной на корпусе, первый и второй элементы возбуждения, первую и вторую измерительные катушки, неподвижные относительно контролируемого объекта, обмотки которых имеют встречно-последовательное включение. При этом элементы возбуждения и измерительные катушки установлены внутри магнитного корпуса коаксиально по отношению к подвижному инерционному элементу. Внутри корпуса вдоль его продольной оси расположен центральный стержень из магнитного материала, на всей длине которого коаксиально расположена тонкостенная диэлектрическая цилиндрическая втулка, на внешней поверхности которой коаксиально установлены первая и вторая измерительные катушки, подвижный инерционный элемент выполнен в виде кольца из материала с высокой электропроводимостью, расположенного коаксиально и симметрично относительно измерительных катушек в их внешнем пространстве. Технический результат заключается в упрощении конструкции и повышении точности измерений, увеличении чувствительности и помехоустойчивости. 2 н. и 3 з.п. ф-лы, 5 ил. 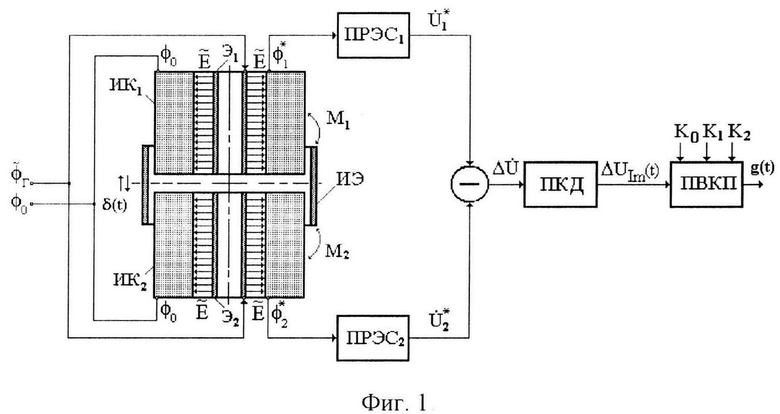
1. Динамический способ измерения виброускорения, заключающийся в том, что измерения осуществляют относительно искусственной неподвижной системы отсчета, в качестве которой используют инерционный элемент, закрепленный на упругом подвесе относительно контролируемого объекта, элементами возбуждения создают переменные физические поля, которыми воздействуют на обмотки измерительных катушек, инициируя в них соответствующий физический эффект, проявляющийся в возникновении на обмотках этих катушек соответствующих ЭДС, и определяют их разность, пропорциональную ускорению контролируемого объекта, отличающийся тем, что в качестве элементов возбуждения используют металлические электроды, посредством которых создают переменные физические поля в виде переменных электрических полей, которыми воздействуют на нижний ряд витков электрических обмоток измерительных катушек, индуцируя тем самым в этих витках соответствующие заряды с переменными потенциалами, которые относительно нулевого потенциала общей точки соединения концов верхнего ряда витков обмоток измерительных катушек создают соответствующие разности потенциалов, посредством указанных разностей потенциалов возбуждают в электрических цепях измерительных катушек на частоте последовательного резонанса этих электрических цепей переменные электрические токи, за счет которых измерительными катушками создают в окружающем их пространстве соответствующие переменные магнитные поля, воздействуя которыми на инерционный элемент из немагнитного материала с высокой электропроводимостью инициируют появление в нем токовихревого эффекта, проявляющегося в появлении переизлученного переменного магнитного поля, которым воздействуют на измерительные катушки и наводят в их обмотках соответствующие ЭДС взаимной индукции, определяют разностную величину между ними, выделяют реактивную составляющую этой разностной величины, пропорциональную величине относительного перемещения контролируемого объекта и инерционного элемента, и вычисляют ускорение перемещения контролируемого объекта в абсолютной системе координат в соответствии с выражением:

где ΔUIm(t) - реактивная составляющая разностной величины между ЭДС взаимной индукции; ΔU'Im(t) и ΔU''Im(t) - первая и вторая производные реактивной составляющей ΔUIm(t); К0 - коэффициент измерительных преобразований;  - собственная циклическая частота колебаний массивного элемента; w - жесткость упругих элементов, m - масса инерционного элемента; β - степень затухания колебаний инерционного элемента.
- собственная циклическая частота колебаний массивного элемента; w - жесткость упругих элементов, m - масса инерционного элемента; β - степень затухания колебаний инерционного элемента.
2. Динамический способ измерения виброускорения по п. 1, отличающийся тем, что погрешность, вызванную наличием нулевого выходного сигнала, устраняют за счет предварительного перераспределения магнитного сопротивления в магнитной цепи измерительных катушек.
3. Датчик для реализации динамического способа измерения виброускорения, содержащий корпус из магнитного материала и подвижный инерционный элемент, установленный внутри корпуса и поддерживаемый упругим подвесом в виде плоской пружины, закрепленной на корпусе; первый и второй элементы возбуждения; первую и вторую измерительные катушки, неподвижные относительно контролируемого объекта, обмотки которых имеют встречно-последовательное включение, причем элементы возбуждения и измерительные катушки установлены внутри магнитного корпуса коаксиально по отношению к подвижному инерционному элементу, отличающийся тем, что первый и второй элементы возбуждения выполнены в виде разрезных тонкостенных металлических цилиндров с длиной, равной конструктивной длине измерительных катушек, и неподвижно закреплены соответственно на внутренних поверхностях этих катушек; внутри корпуса вдоль его продольной оси расположен центральный стержень из магнитного материала, на всей длине которого коаксиально расположена тонкостенная диэлектрическая цилиндрическая втулка, на внешней поверхности которой коаксиально установлены первая и вторая измерительные катушки; подвижный инерционный элемент выполнен в виде кольца из материала с высокой электропроводимостью, расположенного коаксиально и симметрично относительно измерительных катушек в их внешнем пространстве.
4. Датчик для реализации динамического способа измерения виброускорения по п. 3, отличающийся тем, что центральный стержень имеет внутреннее сквозное резьбовое отверстие, в котором расположена втулка из магнитного материала с соответствующей резьбой, имеющая возможность принудительного перемещения вдоль резьбового отверстия.
5. Датчик для реализации динамического способа измерения виброускорения по п. 3, отличающийся тем, что корпус выполнен из двух стандартных ферритовых броневых сердечников, соосно сопряженных своими торцевыми поверхностями.
| US 5359894 A1, 01.11.1994 | |||
| US 5220834 A1, 22.06.1993 | |||
| Устройство для динамических испытаний изделий | 1988 |
|
SU1725079A1 |
| Устройство для динамических испытаний изделий | 1984 |
|
SU1328704A1 |

