Изобретение относится к машиностроению и может быть использовано в качестве привода поступательного движения исполнительных органов механизмов и машин и в качестве двигателя транспортных средств.
Известен инерционный двигатель, содержащий опору и установленный на ней с возможностью поворота вокруг оси корпуса с размещенными на нем двумя одинаковыми дебалансными грузами, соединенными передачей с приводным валом, установленными на кривошипах симметрично относительно плоскости с возможностью синхронного вращения в противоположных направлениях [1].
Недостатком данного двигателя является малая величина амплитуды тягового усилия в направлении перемещения из-за постоянной скорости вращения кривошипов грузов. Кроме того, конструкция предельно сложна и ненадежна вследствие применения громоздких кинематических рычажных и тяговых узлов.
Известен также инерционный двигатель, содержащий корпус с двумя дебалансами, соединенными с электродвигателями и имеющими возможность синхронного вращения в противоположных направлениях с переменной скоростью, связанный с корпусом узел стартовой раскачки и стабилизации частоты вращения дебалансов, формирователь синхронно-импульсных токов переменного направления [2].
В данном двигателе за счет переменной скорости вращения дебалансов обеспечивается разная величина амплитуды инерционных усилий, действующих на корпус в протиповоложных направлениях, и соответственно повышается амплитуда тягового усилия в направлении перемещения.
Однако электромеханическая схема предложенного двигателя характеризуется значительной сложностью, наличием значительного числа элементов, предельно высокими требованиями к настройке и регулировке и представляет собой сложную систему управления и регулирования. Схема содержит порядка 30 /тридцати/ электромеханических блоков и узлов, работа которых должна происходить в условиях строгой синхронизации, стабильности функционирования элементов и т. п. Поэтому практическая возможность применения данного двигателя предельно ограничена.
Наиболее близким по технической сущности и достигаемым результатам к данному изобретению является инерционный двигатель, содержащий опору и установленный на ней корпус с размещенными на нем двумя дебалансами, соединенными с валом электродвигателя с возможностью синхронного вращения в противоположных направлениях, кинематические рычажные передачи, соединяющими вал электродвигателя с каждым из дебалансов, и состоящие из кривошипов, шатунов и цилиндрических шарниров, ориентированных своими осями под строго заданными углами скрещивания [3].
В данном двигателе за счет кинематической схемы равномерное вращение вала двигателя преобразуется в синхронное вращение дебалансов в противоположных направлениях с неравномерной угловой скоростью за оборот, чем и обеспечивается разная величина амплитуды инерционных усилий, действующих на корпус в противоположных направлениях.
Однако конструкция данного двигателя характеризуется предельной конструктивной сложностью, низкой надежностью, а также сложностью настройки и регулировки. Это объясняется как большим количеством, сложностью и громоздкостью самих применяемых рычажных и тяговых узлов, так и нестабильностью ненадежностью и недолговечностью их кинематических соединений.
Целью изобретения является упрощение конструкции, повышение надежности и долговечности инерционного двигателя.
Поставленная цель достигается тем, что в известном инерционнном двигателе, содержащем плоскую опору, свободно установленный на ней плоский корпус с размещенным на нем дебалансом, соединенным с электродвигателем с возможностью синхронного вращения в параллельной корпусу плоскости, к обращенной к опоре плоскости корпуса в зоне вращения дебаланса жестко прикреплен плоский круглый диск, центр и диаметр которого совпадают соответственно с центром вращения дебаланса и диаметром описываемой дебалансом окружности, имеющий возможность фиксированного поворота относительно центра, при этом контактирующая с опорой поверхность диска выполнена со значительным коэффициентом трения за исключением участка в форме сектора, перекрывающего по размерам дебаланс и выполненного с минимально возможным коэффициентом трения.
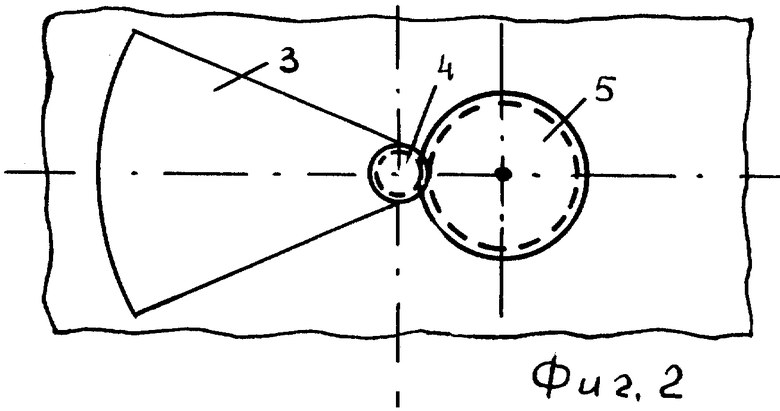
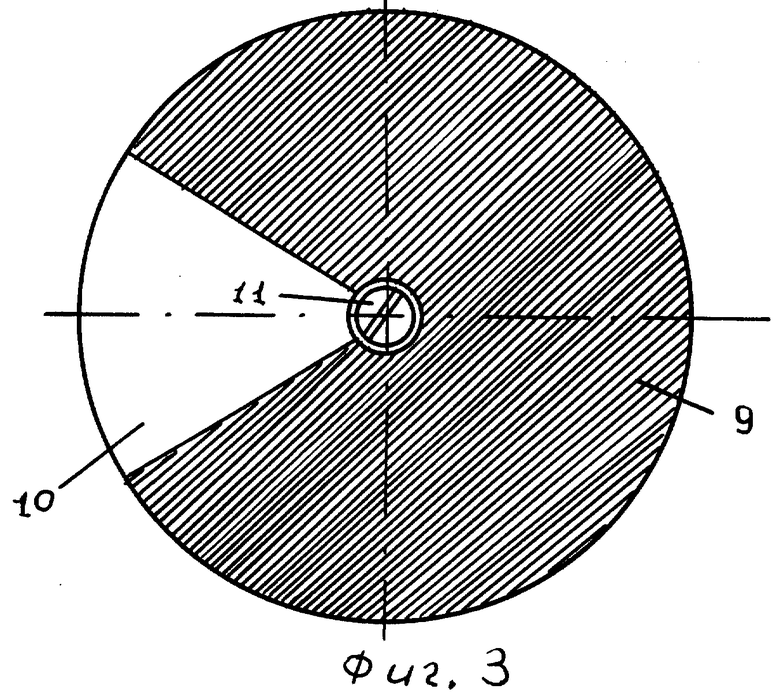
Сущность изобретения поясняется чертежами, где на фиг. 1 схематично изображен предлагаемый инерционный двигатель, общий вид; на фиг. 2 - вид сверху на дебаланс; на фиг. 3 - вид снизу на поверхность контактирующего с опорой диска.
Предлагаемый инерционный двигатель содержит плоскую опору 1, свободно установленный на ней плоский корпус 2 с размещенным на нем секторным дебалансом 3, соединенным через зубчатое зацепление в виде зубчатой оси 4 и зубчатого колеса 5 с осью электродвигателя 6, установленного в кронштейне 7 на корпусе 2, и имеющим возможность синхронного вращения в параллельной корпусу 2 плоскости, при этом к обращенной к опоре 1 плоскости корпуса 2 в зоне вращения дебаланса 3 жестко прикреплен плоский круглый диск 8, центр и диаметр которого совпадают соответственно с центром вращения дебаланса 3 и диаметром описываемой дебалансом 3 окружности, а контактирующая с опорой 1 поверхность 9 диска 8 выполнена со значительным коэффициентом трения за исключением участка 10 в форме сектора, перекрывающего по размерам дебаланс 3 и выполненного с минимально возможным коэффициентом трения. Диск 8 имеет возможность фиксированного поворота относительно центра с помощью утопленного в углубление винта 11. Выполнение поверхности диска 8 с профилированной вышеуказанным образом шероховатостью достигается путем пескоструйной обработки всей поверхности с последующей полировкой участка 10 в форме сектора.
Предлагаемый инерционный двигатель работает следующим образом.
Равномерное вращение вала электродвигателя 6 через зубчатое зацепление 4, 5 вызывает также равномерное синхронное вращение дебаланса 3. При вращении дебаланса 3 возникает постоянная инерционная сила  передаваемая на корпус 2, причем вектор
передаваемая на корпус 2, причем вектор  имеет радиальное направление и вращается вместе с дебалансом 3. Под действием данного вектора
имеет радиальное направление и вращается вместе с дебалансом 3. Под действием данного вектора  корпус 2, свободно установленный на опоре 1 с помощью закрепленного на корпусе диска 8, будет стремиться совершить относительно опоры 1 колебания в радиальных направлениях. При этом между поверхностью 9 диска 8 и поверхностью опоры 1 будут возникать силы трения скольжения, препятствующие смещению корпуса 2 относительно опоры 1. Практически весь период вращения дебаланса 3, за исключением промежутка времени нахождения дебаланса 3 в зоне сектора 10, на диск 8 со стороны опоры 1 действует сила трения
корпус 2, свободно установленный на опоре 1 с помощью закрепленного на корпусе диска 8, будет стремиться совершить относительно опоры 1 колебания в радиальных направлениях. При этом между поверхностью 9 диска 8 и поверхностью опоры 1 будут возникать силы трения скольжения, препятствующие смещению корпуса 2 относительно опоры 1. Практически весь период вращения дебаланса 3, за исключением промежутка времени нахождения дебаланса 3 в зоне сектора 10, на диск 8 со стороны опоры 1 действует сила трения  препятствующая колебаниям корпуса 2 и имеющая вид
препятствующая колебаниям корпуса 2 и имеющая вид
где Nk и Ng - нормальные реакции, вызванные соответственно весом всего корпуса 2 без дебаланса 3 и отдельно весом дебаланса 3;
f1 - коэффициент трения участка 9 диска 8 со значительной шероховатостью.
Равенство /1/ справедливо, так как при любом положении дебаланса 3, кроме зоны сектора 10, точки расположения центров масс корпуса 2 и дебаланса 3, а следовательно, и точки приложения нормальных реакций Nк и Nд расположены в области поверхности 9 с коэффициентом трения f1. В промежуток времени, когда дебаланс 3 находится в зоне сектора 10, на диск 8 со стороны опоры 1 действует сила трения
где f2 - коэффициент трения полированного участка 10 в виде сектора, причем f2 < f1.
Очевидно, что в каждый период вращения дебаланса 3 результирующая сила трения, действующая на диск 8 в радиальном направлении вдоль оси сектора 10,  меньше силы трения
меньше силы трения  в любом другом радиальном направлении на величину ΔFтр.= (f1-f2)Nд. Так как инерционная сила
в любом другом радиальном направлении на величину ΔFтр.= (f1-f2)Nд. Так как инерционная сила  во всех радиальных направлениях постоянна, то такая разница ΔFтр. будет вызывать смещение в каждый период вращения дебаланса 3 корпуса 2 с диском 8 относительно опоры 1 в радиальном направлении вдоль сектора 10 в направлении действия инерционной силы
во всех радиальных направлениях постоянна, то такая разница ΔFтр. будет вызывать смещение в каждый период вращения дебаланса 3 корпуса 2 с диском 8 относительно опоры 1 в радиальном направлении вдоль сектора 10 в направлении действия инерционной силы  Подбирая соответствующим образом вес дебаланса 3 и соотношение коэффициентов трения f1 и f2, нетрудно добиться интенсивного движения корпуса 2 по опоре 1 в радиальном направлении вдоль сектора 10. При этом во избежание колебательных движений корпуса 2 в других радиальных направлениях величина силы трения
Подбирая соответствующим образом вес дебаланса 3 и соотношение коэффициентов трения f1 и f2, нетрудно добиться интенсивного движения корпуса 2 по опоре 1 в радиальном направлении вдоль сектора 10. При этом во избежание колебательных движений корпуса 2 в других радиальных направлениях величина силы трения  делается больше инерционной силы
делается больше инерционной силы  естественно должна быть меньше инерционной силы
естественно должна быть меньше инерционной силы  В этом случае корпус 2 будет смещаться строго в радиальном направлении вдоль сектора 10 без радиальных колебаний в других направлениях. Осуществление такого подбора соотношения величин сил
В этом случае корпус 2 будет смещаться строго в радиальном направлении вдоль сектора 10 без радиальных колебаний в других направлениях. Осуществление такого подбора соотношения величин сил  достаточно просто. Из конструктивных соображений выбирается дебаланс 3 с возможно большей массой, а все вариации величин сил производятся подбором коэффициентов трения f1 и f2. Известно, что соответствующей обработкой, например, пескоструйной, можно обеспечить на участке 9 значительную величину шероховатости поверхности, и соответственно полировкой на участке 10 довольно высокий класс чистоты поверхности. Для изменения направления перемещения корпуса 2 относительно опоры 1 осуществляют фиксированный поворот диска 8 относительно центра с помощью винта 11, при таком повороте смещается радиальная ориентация сектора 10, а следовательно, и направление движения корпуса 2 по опоре 1.
достаточно просто. Из конструктивных соображений выбирается дебаланс 3 с возможно большей массой, а все вариации величин сил производятся подбором коэффициентов трения f1 и f2. Известно, что соответствующей обработкой, например, пескоструйной, можно обеспечить на участке 9 значительную величину шероховатости поверхности, и соответственно полировкой на участке 10 довольно высокий класс чистоты поверхности. Для изменения направления перемещения корпуса 2 относительно опоры 1 осуществляют фиксированный поворот диска 8 относительно центра с помощью винта 11, при таком повороте смещается радиальная ориентация сектора 10, а следовательно, и направление движения корпуса 2 по опоре 1.
Очевидно, что по сравнению с прототипом и устройствами подобного рода данная конструкция отличается такой предельной простотой, надежностью, долговечностью, что на этом вопросе нет смысла останавливаться очень подробно. Здесь исключается необходимость применения двух дебалансов с противоположными направлениями вращения, практически полностью отсутствуют электрические схемные элементы, а также специальные кинематические рычажные и тяговые узлы. Грубо говоря, в данной конструкции за счет принципиально нового, по мнению автора, решения, позволяющего избежать необходимости обеспечения переменной в течение периода скорости вращения дебаланса и соответственно переменной величины действующих на корпус инерционных усилий, удалось исключить как схемные электрические, так и конструктивные кинематические специальные системы управления и регулирования.
Источники информации:
1. А.с. СССР N 347232, кл. B 62 D 57/02, опублик. 1971.
2. А.с. СССР N 1513174, кл. F 02 G 3/00, опублик. 1989.
3. А.с. СССР N 939817, кл. F 03 G 0/00, опублик. 1982 /прототип/.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2123133C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 1999 |
|
RU2149815C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 1996 |
|
RU2093739C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2116925C1 |
| УСТРОЙСТВО ВИБРАЦИОННОГО ПЕРЕМЕЩЕНИЯ | 1999 |
|
RU2158218C1 |
| ВИБРОДВИЖИТЕЛЬ ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ФЕРРОМАГНИТНОЙ ПОВЕРХНОСТИ | 2000 |
|
RU2172696C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ ВИБРАЦИЙ | 1997 |
|
RU2154758C2 |
| ПОДВИЖНАЯ СИСТЕМА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИБОРА | 1997 |
|
RU2144677C1 |
| МЕХАНИЗМ ВИБРАЦИОННОГО ПЕРЕМЕЩЕНИЯ | 1996 |
|
RU2116951C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ТЕЛ | 1998 |
|
RU2148806C1 |
Инерционный двигатель предназначен для использования в машиностроении в качестве привода поступательного движения механизмов и машин и в качестве двигателя транспортных средств. Двигатель содержит плоскую опору и свободно установленный на ней плоский корпус с размещенным на нем дебалансом, соединенным с электродвигателем с возможностью синхронного вращения в параллельной корпусу плоскости. К обращенной к опоре плоскости корпуса в зоне вращения дебаланса жестко прикреплен плоский круглый диск, центр и диаметр которого совпадают соответственно с центром вращения дебаланса и диаметром описываемой дебалансом окружности, имеющий возможность фиксированного поворота относительно центра. Контактирующая с опорой поверхность диска выполнена со значительным коэффициентом трения за исключением участка в форме сектора, перекрывающего по размерам дебаланс и выполненного с минимально возможным коэффициентом трения. Упрощается конструкция, повышается надежность и долговечность двигателя. 3 ил.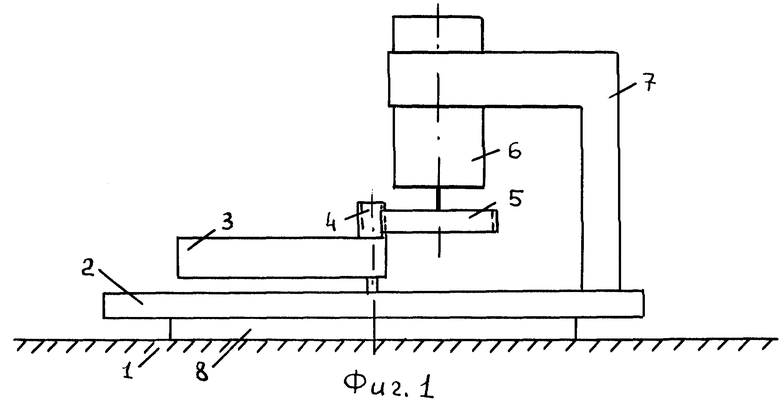
Инерционный двигатель, содержащий плоскую опору, свободно установленный на ней плоский корпус с размещенным на нем дебалансом, соединенным с электродвигателем с возможностью синхронного вращения в параллельной корпусу плоскости, отличающийся тем, что к обращенной к опоре плоскости корпуса, в зоне вращения дебаланса жестко прикреплен плоский круглый диск, центр и диаметр которого совпадают соответственно с центром вращения дебаланса и диаметром описываемой дебалансом окружности, имеющий возможность фиксированного поворота относительно центра, при этом контактирующая с опорой поверхность диска выполнена со значительным коэффициентом трения за исключением участка в форме сектора, перекрывающего по размерам дебаланс и выполненного с минимально возможным коэффициентом трения.
| SU, авторское свидетельство 939817, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
