Изобретение относится к вибрационному транспортированию и может быть использовано в различных областях народного хозяйства.
Известен механизм вибрационного транспортирования штучных предметов, включающий данный предмет, установленный на грузонесущем органе, соединенном с источником возмущающих колебательных воздействий, при этом возмущающие воздействия должны быть либо ориентированы под заданным углом к грузонесущей поверхности, либо содержать постоянную составляющую, носить круговой характер, быть одновременно ориентированными вдоль разных осей (Спиваковский А. О. и др. Вибрационные конвейеры, питатели и вспомогательные устройства. - М.: Машиностроение, 1972, с. 8).
Однако данный механизм характеризуется значительной сложностью, высокими энергозатратами, ограниченными функциональными возможностями.
Известен также механизм вибрационного перемещения, включающий объект с верхней и нижней опорами и вибровозбудитель, установленный со смещением относительно опор (авт. св. СССР N 1392004, кл. B 65 G 27/00, 1988).
Однако данный механизм обеспечивает только микроперемещения объекта и для вибротранспортирования практически не пригоден. Кроме того, за счет специфичности конструкции механизм имеет предельно ограниченные функциональные возможности.
Известен также механизм вибрационного транспортирования штучных предметов, содержащий транспортируемый предмет, упруго защемленный между двумя грузонесущими вибрирующими поверхностями, освобождающими предмет от защемления в моменты достижения им максимальной скорости (авт. св. СССР N 659473, кл. B 65 G 27/04, 1979).
Однако данный механизм характеризуется значительной сложностью как конструкции, так и схемной реализации, регулировки и эксплуатации, а также сравнительно малой эффективностью и имеет специфическое применение.
Наиболее близким к изобретению устройством того же назначения по совокупности признаков является механизм вибрационного перемещения, состоящий из расположенной с возможностью совершения колебаний под действием вибраций шероховатой плоскости и установленного на шероховатой плоскости тела с подвешенным на нем физическим маятником (Блехман И.И., Джанелидзе Г.Ю. Вибрационное перемещение. - М.: Наука, 1964, с. 294 - 299). При этом плоскость наклонена под углом α к горизонту и имеет возможность совершать прямолинейные гармонические колебания, направленные под углом β к плоскости. Механизм данного типа актуален, например, в питателях, служащих для равномерной подачи ориентированных деталей в станках-автоматах.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, принятого за прототип, относятся малоэффективность механизма, требование значительных энергозатрат. Для приведения тела с физическим маятником в движение относительно вибрирующей плоскости при прочих равных условиях необходимо значительно более интенсивные вибрации с многократно увеличенными амплитудами виброускорения плоскости, чем для осуществления той же задачи в случае одного тела без маятника. Кроме того, необходимость сообщения вибраций под углом к плоскости ограничивает возможности использования известного механизма.
Сущность изобретения заключается в том, что вибрационное перемещение тела осуществляется путем создания однонаправленной тяги за счет смещения равнодействующей сил нормального давления контактирующих поверхностей в течение периода вибрации в зоне с различными коэффициентами трения. Это дает возможность создания механизма перемещения по горизонтали и вверх по наклонной вибрирующей плоскости при действии элементарных прямолинейных гармонических колебаний сравнительно малой амплитуды в любом направлении, в том числе - и в плоскости движения тела. Кроме того, появляется возможность использования для виброперемещения случайных паразитных вибраций, возникающих, например, при работе двигателей, станков и т.п., что приводит к значительной экономии энергии.
Технический результат изобретения - уменьшение энергозатрат на виброперемещение и расширение функциональных возможностей механизма.
Технический результат при осуществлении изобретения достигается тем, что в известном механизме вибрационного перемещения, включающем расположенную с возможностью совершения колебаний под действием вибрации шероховатую плоскость, установленное на шероховатой плоскости тело с подвешенным на нем физическим маятником, особенность заключается в том, что контактирующая с плоскостью поверхность тела выполнена в виде двух участков с различными коэффициентами трения, при этом линия границы раздела участков совпадает с проекцией оси подвеса маятника на плоскость контакта.
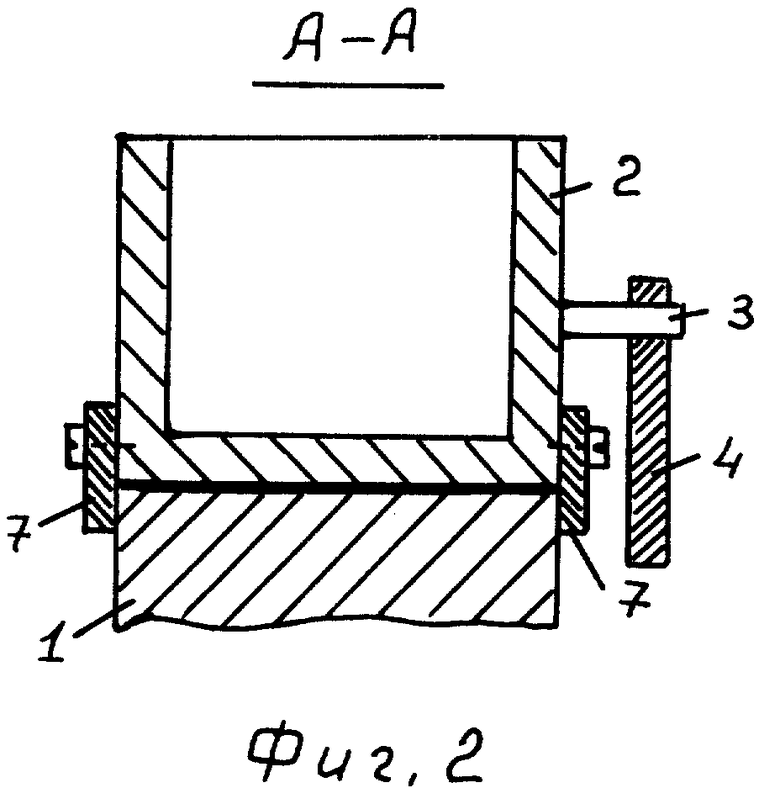
На фиг. 1 схематично изображен предлагаемый механизм виброперемещения; на фиг. 2 - центральный поперечный разрез механизма.
Механизм вибрационного перемещения состоит из шероховатой плоскости 1, расположенной под углом α к горизонту с возможностью совершения колебаний под действием вибраций, установленного на наклонной плоскости 1 тела 2 с подвешенным на оси 3, параллельной плоскости 1, физическим маятником 4. При этом контактирующая с плоскостью 1 поверхность тела 2 выполнена в виде двух участков 5 и 6 с различными коэффициентами трения f1 и f2 так, что линия границы раздела участков 5 и 6 совпадает с проекцией оси подвеса 3 маятника 4 на плоскость контакта. В частном случае, как показано на фиг. 2, тело 2 выполнено коробчатой конструкции для возможности транспортировки в нем грузов и имеет ограничители 7 поперечного смещения тела 2 относительно плоскости 1 в направлении, перпендикулярном движению. В наиболее общем случае плоскость 1 (как и в устройстве-прототипе) совершает прямолинейные гармонические колебания с амплитудой A и частотой ω , направленные под углом β к плоскости 1. На фиг. 1 физический маятник 4 показан в положении статического равновесия (вертикальном положении).
Механизм вибрационного перемещения работает следующим образом.
Считаем для определенности, f1 < f2 и (для упрощения пояснения принципа работы) что колебания плоскости 1 происходят в той же плоскости, т.е. угол β = 0. В этом случае в устройстве-прототипе перемещения тела 1 вверх происходить не будет, так как там принцип виброперемещения тела вверх основан именно на наличие угла β ≠ 0 . В предлагаемом механизме при отсутствии маятника 4 (при β = 0) также не будет происходить поступательного перемещения тела 2, а будут лишь колебания тела 2 относительно исходного положения (за счет действия силы тяжести тело будет двигаться вниз по наклонной плоскости). В полупериод внешней вибрации A sin ω t, когда вибрация действует вправо, на тело 2 действует сила трения  , направленная влево и равная Fтр = f1N1 + f2N2, где N1 и N2 - нормальные реакции, вызванные весом участков тела 2 с коэффициентами трения f1 и f2 соответственно. В другой полупериод, когда вибрация действует влево, на тело 2 будет действовать такая же по величине сила трения
, направленная влево и равная Fтр = f1N1 + f2N2, где N1 и N2 - нормальные реакции, вызванные весом участков тела 2 с коэффициентами трения f1 и f2 соответственно. В другой полупериод, когда вибрация действует влево, на тело 2 будет действовать такая же по величине сила трения  , направленная вправо. Однако при наличии маятника 4 и разных коэффициентах трения f1 и f2 ситуация коренным образом меняется. В полупериод, когда вибрация действует вправо и тело 2 естественно смещается также вправо, маятник 4 смещается относительно тела 2 влево в зону участка с коэффициентом трения f1. При этом на тело 2 действует направленная влево суммарная сила трения
, направленная вправо. Однако при наличии маятника 4 и разных коэффициентах трения f1 и f2 ситуация коренным образом меняется. В полупериод, когда вибрация действует вправо и тело 2 естественно смещается также вправо, маятник 4 смещается относительно тела 2 влево в зону участка с коэффициентом трения f1. При этом на тело 2 действует направленная влево суммарная сила трения  = f1N1 + f2N2 + f1NM, где NM - нормальная реакция, вызванная весом маятника 4. При этом очевидно, что при действии во второй полупериод вибрации влево маятник смещается относительно тела вправо в зону участка с коэффициентом трения f2, и суммарная сила трения, действующая вправо, равна
= f1N1 + f2N2 + f1NM, где NM - нормальная реакция, вызванная весом маятника 4. При этом очевидно, что при действии во второй полупериод вибрации влево маятник смещается относительно тела вправо в зону участка с коэффициентом трения f2, и суммарная сила трения, действующая вправо, равна  = f1N1 + f2N2 +f2NM. Так как f1 < f2, то очевидно, что Fтр<
= f1N1 + f2N2 +f2NM. Так как f1 < f2, то очевидно, что Fтр<  на величину (f2 - f1)NM, т.е. тело за каждый период действия внешних вибраций получает постоянную составляющую внешней силы, направленную вправо и при определенной интенсивности внешних вибраций, соотношении коэффициентов трения f1 и f2, массе маятника mM тело будет двигаться вверх по наклонной плоскости. Наличие как в устройстве-прототипе угла β ≠ 0 ничего принципиально не изменяет, а только усиливает вышеуказанный эффект виброперемещения.
на величину (f2 - f1)NM, т.е. тело за каждый период действия внешних вибраций получает постоянную составляющую внешней силы, направленную вправо и при определенной интенсивности внешних вибраций, соотношении коэффициентов трения f1 и f2, массе маятника mM тело будет двигаться вверх по наклонной плоскости. Наличие как в устройстве-прототипе угла β ≠ 0 ничего принципиально не изменяет, а только усиливает вышеуказанный эффект виброперемещения.
Таким образом, одновременное наличие на контактирующей с плоскостью поверхности тела участков с различными коэффициентами трения и подвижного элемента (маятника 4), перемещающего в течение периода действия внешних вибраций положение своего центра масс в зоны с различными коэффициентами трения, позволяет полностью изменить принцип работы механизма вибрационного перемещения и сделать его отличающимся от принципов действия всех известных механизмов данного назначения. Работа предлагаемого механизма не зависит от характера вибрации, возможны любые по направлению вибрации, в том числе расположенные в плоскости движения тела. Если в устройстве-прототипе наличие маятника только увеличивает энергозатраты на виброперемещение вверх по наклонной плоскости, то в предлагаемом механизме присутствие маятника наоборот необходимо для реализации предлагаемого нового принципа действия. Механизм предельно прост и не предъявляет практически никаких требований к возмущающим воздействиям по амплитуде, частоте, фазности, направлениям действия относительно плоскости транспортирования, не требует одновременности действия вибраций по разным осям.
При этом очевидно, что наличие участков поверхности с разными коэффициентами трения f1 и f2 позволяет при той же амплитуде A и частоте ω возмущающих вибраций резко увеличить скорость перемещения тела вверх по наклонной плоскости, что значительно уменьшает энергозатраты на виброперемещение. Кроме того, возможность виброперемещения тела при любом направлении действующих вибраций, в том числе при действии вибраций в плоскости перемещения и при случайных паразитных вибрациях, резко расширяет функциональные возможности предлагаемого механизма.
В результате подробных математических выкладок исследована динамика предлагаемого вибрационного механизма как системы с двумя степенями свободы. При этом были получены аналитические зависимости для ускорения, скорости и поступательного перемещения тела на плоскости при прямом ходе - в те полупериоды возмущающих вибраций, когда тело движется вверх по наклонной плоскости, обратном ходе и результирующего движения.
Далее приводится итоговая зависимость для разности амплитудных значений ускорений тела при прямом  и обратном
и обратном  ходе, характеризующая результирующее направленное вверх по плоскости ускорение тела
ходе, характеризующая результирующее направленное вверх по плоскости ускорение тела
где
mT и mM - соответственно массы тела 2 и маятника 4.
Значения A, β,ω f51 и f2 теоретически и экспериментально подбираются такими, чтобы тело двигалось вверх по наклонной плоскости, преодолевая силу тяжести и силу трения. Как видно из зависимости, первое слагаемое обуславливает движение тела вверх по плоскости за счет наличия угла β между направлением вибраций и плоскости (принцип прототипа). Второе слагаемое иллюстрирует предложенный принцип и характеризует дополнительное увеличение ускорения за счет разности коэффициентов трения, обуславливающее снижение энергозатрат на виброперемещение за счет возможности его осуществления с той же интенсивностью при меньших значениях A и ω . Виброперемещение тем интенсивнее, чем больше разность коэффициентов трения и больше масса маятника по отношению к массе тела. Даже при колебаниях в плоскости движения тела β = 0, sin β = 0 движение вверх все равно будет происходить, что резко расширяет функциональные возможности предлагаемого механизма.
В изготовленном опытном образце механизма виброперемещения тело 2 выполнено в виде коробчатой металлической тары для расположения в ней транспортируемых грузов, при этом левая на фиг. 1 половина нижней поверхности тары, размещенная ниже на наклонной плоскости, оставлена металлической без покрытия, а на правую половину нанесено тонкое резиновое покрытие, при этом достигнуто требуемое условие f2 > f1.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ВИБРАЦИОННОГО ПЕРЕМЕЩЕНИЯ | 2000 |
|
RU2181687C1 |
| МЕХАНИЗМ ВИБРАЦИОННОГО ПЕРЕМЕЩЕНИЯ | 1999 |
|
RU2149814C1 |
| УСТРОЙСТВО ВИБРАЦИОННОГО ПЕРЕМЕЩЕНИЯ | 1999 |
|
RU2158218C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 1999 |
|
RU2149815C1 |
| ВИБРАЦИОННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 1996 |
|
RU2121954C1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ ВИБРАЦИЙ | 1997 |
|
RU2154758C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2000 |
|
RU2163208C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 2000 |
|
RU2166470C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО ТРАНСПОРТИРОВАНИЯ | 1999 |
|
RU2165385C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 1996 |
|
RU2093739C1 |
Механизм вибрационного перемещения включает расположенную с возможностью совершения колебаний под действием вибрации шероховатую плоскость, установленное на шероховатой плоскости тело с подвешенным на нем физическим маятником. Контактирующая с плоскостью поверхность тела выполнена в виде двух участков с различными коэффициентами трения. Линия границы раздела участков совпадает с проекцией оси подвеса маятника на плоскость контакта, Данная конструкция позволяет снизить энергозатраты на виброперемещение и расширить функциональные возможности механизма. 2 ил.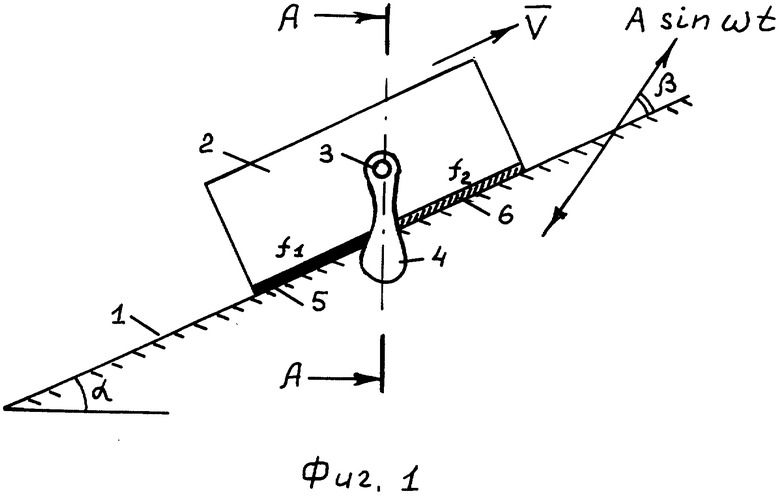
Механизм вибрационного перемещения, включающий расположенную с возможностью совершения колебаний под действием вибрации шероховатую плоскость, установленное на шероховатой плоскости тело с подвешенным на нем физическим маятником, отличающийся тем, что контактирующая с плоскостью поверхность тела выполнена в виде двух участков с различными коэффициентами трения, при этом линия границы раздела участков совпадает с проекцией оси подвеса маятника на плоскость контакта.
| Блехман И.И., Джанелидзе Г.Ю | |||
| Вибрационное перемещение | |||
| - М.: Наука, 1964, с | |||
| ДИФФЕРЕНЦИАЛЬНАЯ ТЕРМИОННАЯ ЛАМПА | 1920 |
|
SU294A1 |
