Изобретение относится к антенной технике и предназначено для дополнительной стабилизации диаграммы направленности антенной системы спутника связи, расположенного на геостационарной орбите.
Траектория движения искусственных спутников Земли /ИСЗ/, расположенных на геостационарной орбите, определяется многими факторами. Самый значимый дестабилизирующий фактор - действие вращающего момента, вызывающего вращение ИСЗ. Это приводит к отклонению луча диаграммы направленности /ДН/ антенной системы ИСЗ от зоны обслуживания. Следствием этого является обрыв связи или потеря информации, которые в ряде случаев могут иметь катастрофические последствия.
Для устранения этого недостатка применяются различные устройства стабилизации пространственной ориентации ИСЗ.
Наиболее применимой является гироскопическая система стабилизации [1], состоящая из стабилизированной платформы, связной антенной, двух гироскопов, шестеренки, двигателя. Однако гироскопическая стабилизация имеет точность порядка /0,5 - 1,5/o и малоэффективна для остронаправленных антенн с шириной ДН порядка 1o и меньше.
Известна также многоотражательная антенна с согласованной диаграммой направленности [2] , позволяющая облучать точно очерченные участки земной поверхности. Антенна состоит из основного отражателя и по меньшей мере одного вспомогательного отражателя, при этом активные поверхности отражателей деформированы так, чтобы имелось соответствие с областью земной поверхности с точно очерченными границами за счет выполнения условия Мичугуча для исключения скрещенной поляризации. Однако эта система обладает низкой точностью вследствие атмосферных воздействий на поляризационные свойства.
Наиболее близкой по технической сущности к заявляемому изобретению является система спутниковой связи [3], предназначенная для сохранения положения ДН-излучения первого сигнала, излучаемого антенной спутниковой системы связи, расположенной на геосинхронной орбите для перекрытия определенной области на Земле, в которой расположены наземные станции. Вторая спутниковая антенна излучает сигнал радиомаяка с ДН, перекрывающей область на Земле больше заданной и включающей в себя заданную область. Каждая из наземных станций, расположенных внутри и по периферии области, принимает первый и второй сигналы и определяет между принятым сигналом радиомаяка и первым сигналом с целью создания сигнала наземной станции, пропорционального этому отношению. Сигналы наземных станций сравниваются один с другим только для периферических станций с целью определения ошибки в положении диаграммы направленности системы связи относительно заданной области. Положение спутника корректируется по сигналу ошибки в положении диаграммы.
Однако такая система обладает недостаточной точностью дополнительной стабилизации ДН из-за влияния атмосферных воздействий (град, дождь), солнца, использование такой системы обходится очень дорого, так как является многопозиционной системой, к тому же быстродействие этой системы достаточно большое.
Целью изобретения является повышение точности дополнительной стабилизации пространственного направления луча ДН ретранслятора на зону обслуживания, удешевление спутниковой системы связи, а также повышение ее быстродействия.
Поставленная цель достигается тем, что в системе спутниковой связи, состоящей из бортовой части, включающей бортовую вычислительную машину /БЦВМ/ и приемопередающие антенны ретранслятора, находящиеся на гиростабилизированной платформе, и наземной части, наземная часть представляет собой передатчик, состоящий из последовательно соединенных генератора СВЧ, возбужденного на частоте, соответствующей длине волны λ, усилителя мощности и передающей антенны, а на гиростабилизированной платформе ретранслятора установлена система дополнительной стабилизации ДН ретранслятора, состоящая из n приемных антенн, где n=3, 5, одна из которых, являясь опорной, находится в центре окружности с радиусом
где θr - погрешность гироскопической стабилизации, o, а /n-1/ приемные антенны расположены по этой окружности с интервалом в 1/4 ее длины, n входных усилителей СВЧ, n преобразователей частоты, гетеродина, /n-1/канального коммутатора, фазометра, при этом выход каждой из n приемных антенн через соответствующий усилитель СВЧ соединен со входом соответствующего преобразователя частоты, а выход гетеродина соединен с гетеродинными входами n преобразователей частоты, выходы /n-1/ преобразователей частоты соединены с соответствующими входами /n-1/-канального коммутатора, выход которого соединен с измерительным входом фазометра, опорный вход которого соединен с выходом преобразователя частоты, находящегося в опорном канале, а выход фазометра и управляющий вход /n-1/-канального коммутатора соединены с БЦВМ.
На фиг.1 представлена структурная схема предлагаемой системы спутниковой связи.
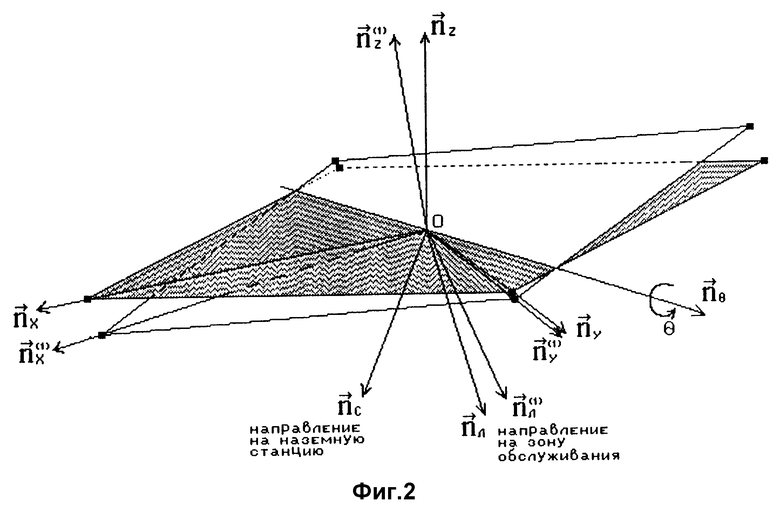
На фиг.2 изображено расположение плоскости платформы ретранслятора до и после дестабилизирующего вращения.
Система спутниковой связи состоит из бортовой части, включающей БЦВМ 1, приемопередающие антенны ретранслятора 2, расположенные на гидростабилизированной платформе 3, на которой также размещена система дополнительной стабилизации ДН ретранслятора, состоящая из приемных антенн 4,5, входных усилителей СВЧ 6, преобразователей частоты 7, гетеродина 8, четырехканального коммутатора 9, фазометра 10. Наземная часть представляет собой передающую станцию, состоящую из генератора СВЧ 11, усилителя мощности 12 и передающей антенны 13.
Система работает следующим образом.
БЦВМ 1, управляя четырехканальным коммутатором 9, подключает на измерительный вход фазометра 10 сигналы приемных антенн 4, расположенных по окружности с радиусом d на расстоянии друг от друга в 1/4 длины окружности /назовем их реперными антеннами/, а в центре этой окружности расположена опорная приемная антенна 5, производит измерения фаз этих сигналов относительно сигнала опорной приемной антенны 5, и на основании этих измерений производит подстройку плоскости платформы 3 к плоскости фазового сигнала наземной передающей антенны 13.
Рассмотрим механизм восстановления параметров оси дестабилизирующего по измерениям фазы электромагнитной волны от реперных антенн 4, вызванных этим вращением.
Как правило, гиростабилизированные платформы расположены из ИСЗ в плоскости, перпендикулярной направлению на Землю. При дестабилизирующих воздействиях, вызывающих вращение ИСЗ вокруг оси, расположенной в плоскости платформы, происходит наибольшее смещение ДН ретранслятора из зоны обслуживания. Этим объясняется выбор расположения системы дополнительной стабилизации на борту ИСЗ.
Как сказано выше, систему дополнительной стабилизации ДН следует расположить в плоскости, нормальной к направлению на Землю /на наземную станцию/. Зона обслуживания, на которую направлен луч ретранслятора ИСЗ, может не совпадать с местом расположения наземной станции. Важно, чтобы связанные с этим погрешности наведения луча ДН на зону обслуживания были незначительными и приемлемыми.
На фиг.2 изображено пространственное расположение платформы ретранслятора 3 до и после дестабилизирующего вращения.
Свяжем с первоначальной ориентацией приемных антенн 4,5 правую декартовую прямоугольную систему координат /СК/  так, что ее центр 0 расположен в центре масс ИСЗ /опорная антенна 5/. Ось
так, что ее центр 0 расположен в центре масс ИСЗ /опорная антенна 5/. Ось  направим на первую реперную антенну, ось
направим на первую реперную антенну, ось  на вторую /нормальную к первой/. Тогда направление на наземную станцию будет определяться единичным вектором
на вторую /нормальную к первой/. Тогда направление на наземную станцию будет определяться единичным вектором  а направление луча ДН - единичным вектором
а направление луча ДН - единичным вектором 
Координаты реперных антенн в СК 0 

где dx, dy-расстояние от опорной антенны к реперным антеннам.
Измеренная фаза электромагнитной волны жестко связана с проекцией расположения реперных антенн  на направление
на направление  соотношением
соотношением
где ϕ - фаза электромагнитной волны;
λ - длина волны.
Поэтому во всех дальнейших вычислениях будем оперировать только с проекциями ΔRi.
Отметим также, что явная избыточность количества реперных точек (для однозначного определения ориентации плоскости, достаточно опорной, и двух реперных антенн  ) нужна на тот случай, если антенна опорного канала 5 находится не в центре масс ИСЗ. Тогда при вращениях ИСЗ она также будет претерпевать пространственные перемещения, и изменения проекций двух противоположных реперных антенн, связанные с этим вращением, будут различными. Учесть это явление в первом приближении /для малых смещений опорной антенны от центра масс ИСЗ/ можно простым вычислением среднего арифметического 2-х изменений проекций реперных антенн, расположенных на одной диагонали на направлении
) нужна на тот случай, если антенна опорного канала 5 находится не в центре масс ИСЗ. Тогда при вращениях ИСЗ она также будет претерпевать пространственные перемещения, и изменения проекций двух противоположных реперных антенн, связанные с этим вращением, будут различными. Учесть это явление в первом приближении /для малых смещений опорной антенны от центра масс ИСЗ/ можно простым вычислением среднего арифметического 2-х изменений проекций реперных антенн, расположенных на одной диагонали на направлении  Поэтому, не ограничивая общности, дальнейшие вычисления будем производить только для двух реперных антенн
Поэтому, не ограничивая общности, дальнейшие вычисления будем производить только для двух реперных антенн 
Для проекций векторов  на направление
на направление  получим:
получим:
Под действием дестабилизирующего поворота на угол θ вокруг оси, определяемой в СК  единичным вектором
единичным вектором  , произойдет изменение ориентации векторов реперных антенн
, произойдет изменение ориентации векторов реперных антенн 

Изменятся и проекции векторов  на направление nc, которые примут значение
на направление nc, которые примут значение
Фазометр зафиксирует изменение этих проекций относительно первоначальных значений
Ограничиваясь членами нулевого и первого порядка малости по параметру θ (ввиду малости угла поворота θ), получим
Система уравнений /7/ численно неразрешима. Поэтому, восстанавливая параметры оси дестабилизирующего вращения, примем методическое допущение, что ось вращения находится в плоскости расположения приемных антенн 4,5:
Тогда, представляя /8/ в /7/ и производя необходимые вычисления, получим систему уравнений
Отсюда следуют расчетные формулы:

Итак, в предположении, что ось вращения находится в плоскости платформы 3 /COS  = 0/ формулы /10/, находим ее параметры: единичный вектор, определяющий направление оси
= 0/ формулы /10/, находим ее параметры: единичный вектор, определяющий направление оси  и угол - θ , на который нужно повернуть платформу для того, чтобы вернуть ее в первоначальное положение
и угол - θ , на который нужно повернуть платформу для того, чтобы вернуть ее в первоначальное положение
Общая погрешность системы стабилизации складывается из методической и аппаратной погрешности, включающей в себя погрешность измерительных приборов.
Под методической погрешностью будем понимать величину угла между первоначальным направлением произвольного единичного вектора  луча ДН ретранслятора ИСЗ и его направлением nл после дестабилизирующего вращения вокруг оси
луча ДН ретранслятора ИСЗ и его направлением nл после дестабилизирующего вращения вокруг оси  на угол θ и восстанавливающим поворотом оси
на угол θ и восстанавливающим поворотом оси  на угол - θx, произведенным по расчетным формулам /10/. Методическая погрешность зависит от взаимного расположения векторов
на угол - θx, произведенным по расчетным формулам /10/. Методическая погрешность зависит от взаимного расположения векторов  где
где  единичный вектор, задающий ориентацию антенной системы стабилизации, нормальный к плоскости расположения системы дополнительной стабилизации. Еще точнее от величин
единичный вектор, задающий ориентацию антенной системы стабилизации, нормальный к плоскости расположения системы дополнительной стабилизации. Еще точнее от величин  и
и  (т.к.
(т.к.  по условию) в большей степени и от других сочетаний этих векторов в гораздо меньшей степени.
по условию) в большей степени и от других сочетаний этих векторов в гораздо меньшей степени.
Таким образом, погрешность стабилизации направления луча ДН ИСЗ минимальна в направлении луча на наземную станцию, минимальная методическая погрешность соответствует вращениям вокруг оси  расположенной в плоскости системы дополнительной стабилизации. Последний вывод не является неожиданностью, так как при решении задачи использовалось методическое допущение, что ось вращения лежит в плоскости системы стабилизации, а значит именно такие вращения данная методика отрабатывает лучше всего, с минимальной, практически нулевой методической погрешностью. Максимальная погрешность соответствует дестабилизирующим вращениям при
расположенной в плоскости системы дополнительной стабилизации. Последний вывод не является неожиданностью, так как при решении задачи использовалось методическое допущение, что ось вращения лежит в плоскости системы стабилизации, а значит именно такие вращения данная методика отрабатывает лучше всего, с минимальной, практически нулевой методической погрешностью. Максимальная погрешность соответствует дестабилизирующим вращениям при  т.е. когда ось вращения направлена на наземную станцию В качестве методической погрешности следует принять ее максимальное значение при
т.е. когда ось вращения направлена на наземную станцию В качестве методической погрешности следует принять ее максимальное значение при  При этом направление луча ДН ИСЗ будет определяться выражением
При этом направление луча ДН ИСЗ будет определяться выражением
а погрешность стабилизации - выражением /12/
Формула определяет максимальное значение методической погрешности в зависимости от угла между векторами  Так, если предположить, что этот угол равен 6o /зона на Земле с радиусом примерно 4 тыс.км с центром в точке расположения наземной станции/, методическая погрешность не превышает величины, составляющей 0,1 от величины составляющей угла дестабилизирующего вращения, которая полностью определяется гироскопической системой стабилизации.
Так, если предположить, что этот угол равен 6o /зона на Земле с радиусом примерно 4 тыс.км с центром в точке расположения наземной станции/, методическая погрешность не превышает величины, составляющей 0,1 от величины составляющей угла дестабилизирующего вращения, которая полностью определяется гироскопической системой стабилизации.
Таким образом, предлагаемая система стабилизации направления луча ДН ретранслятора ИСЗ позволяет на порядок повысить точность любой существующей и установленной на ИСЗ гироскопической системы стабилизации.
Аппаратная погрешность незначительна по сравнению с методической, она накладывает лишь определенные требования на основные элементы системы стабилизации.
Аппаратная погрешность в основном определяется погрешностью измерения фазы. Связать погрешность стабилизации направления ДН ретранслятора ИСЗ с погрешностью измерения фазы фазометром 10 можно следующим образом. Методически возврат луча ДН осуществляется вращением вокруг оси, находящейся в плоскости системы стабилизации, по формулам /10/, откуда простым дифференцированием в приближении малых θ получим
где K = 2π/λ,
λ - длина волны электромагнитного излучения;
dx - радиус окружности, в центре которой находится опорная приемная антенна 5;
δϕ - погрешность измерения фазы наземной станции.
Выражение /13/ показывает, что аппаратная погрешность восстановления луча ДН в Kdx раз меньше погрешности фазометра. Однако линейные размеры системы приемных антенн нельзя делать сколь угодно большими, т.к. при дестабилизирующим вращении набег фазы электромагнитной волны от реперных антенн 4, вызванный этим вращением, может выйти за диапазон ±180o, что приведет к катастрофическим последствиям.
Целесообразный выбор минимального радиуса окружности, на которой расположены реперные антенны 4, определяется тем, что фазовый набег от реперных антенн не должен быть меньше 180o при изменении ориентации ИСЗ в пределах гироскопической погрешности ±θr. То есть
Подставляя /14/ в /12/, найдем
Выражение /15/ дает максимальную оценку погрешности стабилизации луча ДН в зависимости от ошибки измерения фазы фазометром. Ее можно уменьшить, увеличивая фазовый радиус окружности расположения приемных антенн 4. Но даже эта максимальная оценка не накладывает жестких условий на точность измерения фазы фазометром 10. Так, если положить, что погрешность фазометра составляет 2o (δθ≢2o), то выражение /15/ показывает, что связанная с этим погрешность стабилизации направления луча ДН ретранслятора δθ на два порядка меньше гироскопической погрешности θr, а значит ею можно пренебречь по сравнению с методической погрешностью.
Быстродействие системы стабилизации в системе спутниковой системы связи, описанной в прототипе, в целом определяется временем отклика измерительной системы наземных станций и временем приема и выдачи команды управления на борт ИСЗ по командной радиолинии. Быстродействие предлагаемой системы стабилизации будет определяться временем отклика измерительной системы, расположенной на борту ИСЗ.
Таким образом, предлагаемая система спутниковой связи обладает следующими преимуществами:
- не задействуются командные радиолинии;
- более высокое быстродействие системы, что следует из предыдущих выводов, а значит улучшается ограничение, накладываемое на величину дестабилизирующего момента вращения;
- низкая стоимость наземной передающей станции позволяет располагать ее в каждой зоне обслуживания, тем самым сводя к минимуму погрешность стабилизации направления луча на зону обслуживания;
- уменьшение потребления энергоресурсов борта ИСЗ, т.к. система дополнительной стабилизации работает на прием, а не на излучение больших мощностей сигналов;
- нет перерыва в работе системы стабилизации при прохождении спутником диска Солнца;
- автономность системы. Из внешних систем требуется только передающая наземная станция, которая фактически является маяком.
Источники информации:
1. H 01 Q 1/18, заявка ЕПВ N 0209216, 1987 г.
2. H 01 Q 21/34, заявка Франции N 2577074, 1987 г.
3. H 01 Q 3/00, патент США N 4630058, 1986 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1995 |
|
RU2090003C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОРИЕНТАЦИИ БОРТОВОЙ АНТЕННЫ БЕСПИЛОТНОГО КОМПЛЕКСА ДЛЯ ИЗМЕРЕНИЙ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕНН | 2019 |
|
RU2704393C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2426167C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2612127C2 |
| РЕТРАНСЛЯТОР СВЯЗИ | 1995 |
|
RU2099879C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЭЛЕКТРОННЫЙ КОМПЛЕКС | 2009 |
|
RU2419814C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТЕПЕНИ ОПАСНОСТИ ЦУНАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2454686C1 |
| АДАПТИВНАЯ СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1983 |
|
SU1840277A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ | 2017 |
|
RU2654846C1 |
| ГЛОБАЛЬНАЯ ТЕЛЕКОММУНИКАЦИОННАЯ СИСТЕМА СВЯЗИ И ВЕЩАНИЯ | 1999 |
|
RU2150787C1 |
Изобретение относится к антенной технике и предназначено для дополнительной стабилизации диаграммы направленности антенной системы спутника связи, расположенного на геостационарной орбите. Система спутниковой связи состоит из бортовой части, включающей бортовую цифровую вычислительную машину (БЦВМ), I приемопередающие антенны ретранслятора 2, расположенные на гиростабилизированной платформе 3, на которой также размещена система дополнительной стабилизации ДН ретранслятора, состоящая из n приемных антенн 4, где n = 3, 5, одна из которых, являясь опорной 5, находится в центре окружности с радиусом  где θг - погрешность гироскопической стабилизации, o, а (n - 1) приемные антенны расположены по одной окружности с интервалом в 1/4 ее длины, n входных усилителей СВЧ 6, преобразователей частоты 7, гетеродина 8, (n - 1)-канального коммутатора 9, фазометра 10. Наземная часть представляет собой передатчик, состоящий из последовательно соединенных генератора СВЧ 11, усилителя мощности 12 и передающей антенны 13. Выход каждой из приемных антенн 4, 5 через соответствующий усилитель СВЧ 6 соединен со входом соответствующего преобразователя частоты 7, а выход гетеродина 8 соединен с гетеродинными входами преобразователей частоты 7, выходы (n - 1) преобразователей частоты соединены с соответствующими входами (n - 1)-канального коммутатора 9, выход которого соединен с измерительным входом фазометра 10, опорный вход которого соединен с выходом преобразователя частоты 7, находящегося в канале опорной антенны 5, а выход фазометра 10 и управляющий вход (n - 1)-канального коммутатора 9 соединены с БЦВМ 1. Достигаемым техническим результатом является повышение точности дополнительной стабилизации пространственного направления луча ДН ретранслятора на зону обслуживания, удешевление спутниковой системы связи, а также повышение ее быстродействия. 2 ил.
где θг - погрешность гироскопической стабилизации, o, а (n - 1) приемные антенны расположены по одной окружности с интервалом в 1/4 ее длины, n входных усилителей СВЧ 6, преобразователей частоты 7, гетеродина 8, (n - 1)-канального коммутатора 9, фазометра 10. Наземная часть представляет собой передатчик, состоящий из последовательно соединенных генератора СВЧ 11, усилителя мощности 12 и передающей антенны 13. Выход каждой из приемных антенн 4, 5 через соответствующий усилитель СВЧ 6 соединен со входом соответствующего преобразователя частоты 7, а выход гетеродина 8 соединен с гетеродинными входами преобразователей частоты 7, выходы (n - 1) преобразователей частоты соединены с соответствующими входами (n - 1)-канального коммутатора 9, выход которого соединен с измерительным входом фазометра 10, опорный вход которого соединен с выходом преобразователя частоты 7, находящегося в канале опорной антенны 5, а выход фазометра 10 и управляющий вход (n - 1)-канального коммутатора 9 соединены с БЦВМ 1. Достигаемым техническим результатом является повышение точности дополнительной стабилизации пространственного направления луча ДН ретранслятора на зону обслуживания, удешевление спутниковой системы связи, а также повышение ее быстродействия. 2 ил.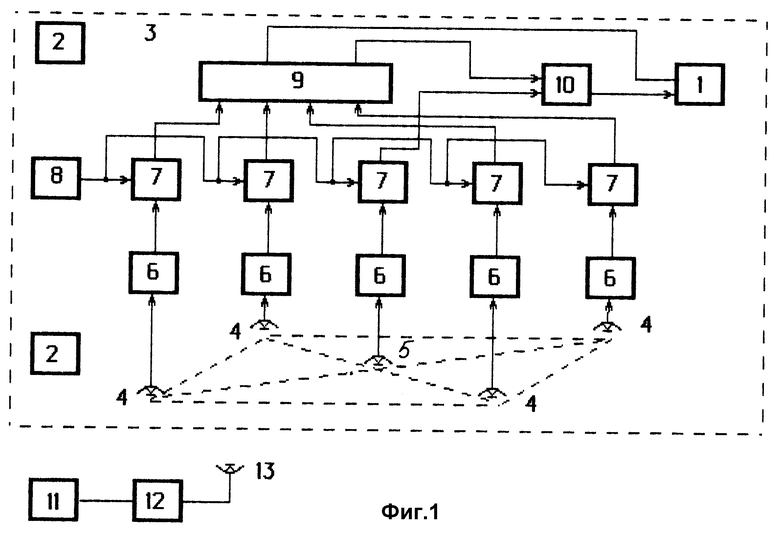
Система спутниковой связи, состоящая из бортовой части, включающей бортовую цифровую вычислительную машину (БЦВМ) и приемопередающие антенны ретранслятора, находящиеся на гиростабилизированной платформе, и наземной части, состоящей из СВЧ передатчика с подключенной к нему передающей антенной, излучающей сигнал на частоте, соответствующей длине волны λ, отличающаяся тем, что на гиростабилизированной платформе ретранслятора установлена система дополнительной стабилизации диаграммы направленности ретранслятора, состоящая из n приемных антенн, где n = 3,5, одна из которых, являясь опорной, находится в центре окружности с радиусом
где θr погрешность гироскопической стабилизации,
а (n - 1) антенны расположены по этой окружности с интервалом 1/4 ее длины, n входных усилителей СВЧ, n преобразователей частоты, гетеродина, коммутатора с (n - 1) входами и одним выходом, фазометра, при этом выход каждой из приемных антенн через соответствующий усилитель СВЧ соединен с входом соответствующего преобразователя частоты, а выход гетеродина соединен с гетеродинными входами преобразователей частоты, выходы (n - 1) преобразователей частоты соединены с соответствующими (n - 1) входами коммутатора, выход которого соединен с измерительным входом фазометра, опорный вход которого соединен с выходом преобразователя частоты, находящегося в опорном канале, а выход фазометра и управляющий вход коммутатора соединен с БЦВМ, предназначенной для подключения на измерительный вход фазометра сигналов (n - 1) приемных антенн, измерения фаз этих сигналов посредством фазометра и подстройки плоскости фазового фронта сигналов наземной передающей антенны на основании этих измерений.
| US, патент, 4630058, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
