1. Область техники, к которой относится изобретение
Изобретение относится к технике антенных измерений и может быть использовано для исследования диаграмм направленности (ДН) антенны методом облета.
2. Уровень техники
Известен способ измерения ДН диапазонной антенны (СССР, SU 1804627 A3, G01R 29/10, опубл., 23.03.1993), включающий излучение сигнала на каждой частоте рабочего диапазона с борта летательного аппарата, перемещающегося в дальней зоне исследуемой антенны по заданной траектории.
Также известен облетный способ измерения ДН, основанный на перемещении измерительной аппаратуры в пространстве относительно исследуемой антенны с помощью пилотируемых и непилотируемых летательных аппаратов описанный в книге «Метод измерения характеристик антенн СВЧ» под ред. Н.М. Цейтлина. 1985., стр. 128-135.
Общими недостатками данных способов являются низкие точность и производительность измерений диаграммы направленности.
Известен способ, основанный на использовании бортового источника излучений, перемещаемого в пространстве относительно исследуемой антенны с помощью летательного аппарата, наземной опорной антенны, работающей на частоте исследуемой антенны, средств измерения координат летательного аппарата и включающий в себя излучение измерительных сигналов бортовым источником, прием излученных сигналов исследуемой антенной и опорной антенной, измерение отношения амплитуд принятых измерительного и опорного сигналов, измерение текущих угловых координат летательного аппарата, ориентирование оси опорной антенны на летательный аппарат в процессе измерений описанный в книге «Автоматизированные антенные измерения». Страхов А.Ф 1985, стр. 73-75.
Недостатком данного способа является невозможность обеспечения требуемой точности измерения ДН исследуемой приемной антенны.
Известен способ измерения ДН приемной антенны (СССР, SU 1778714 Al, G01R 29/10, опубл., 30.11.1992), в котором излучаются измерительные сигналы f0 с борта летательного аппарата, перемещающегося в дальней зоне исследуемой антенны, прием излученного измерительного сигнала исследуемой антенной и опорного сигнала опорной антенной, измерение отношения амплитуд принятого измерительного и опорного сигналов с одновременным измерением координат летательного аппарата относительно исследуемой антенны, при этом ось опорной антенны постоянно ориентируют в направлении на летательный аппарат.
Недостатком данного способа является невозможность измерения ДН передающих антенн и высокая удельная стоимость измерений за счет более сложной конструкции и низкого уровня автоматизации.
Известны многочисленные методы стабилизации судовых антенн путем крепления их к стабилизирующим опорно-поворотным устройствам с использованием кардановых подвесов для противодействия эффектам бортовой качки (ПМ №135454, ИЗ №2125326, ИЗ №97118105), а также построенное на схожих принципах антенное устройство (ИЗ №2173921). Общим недостатком этих систем является их громоздкость и невозможность использования на малоразмерных летательных аппаратах. Установка же подобных устройств на большегрузные самолеты приведет к значительному увеличению затрат на облет.
Известен метод измерения параметров направленности антенны с помощью БПЛА методом облета (Российская Федерация, №2626561, G01R 29/10 опубл. 28.07.2017), в котором технический результат: повышение точности, сокращение времени измерения параметров направленности антенны и уменьшение стоимости их исследования достигается тем, что, с целью полной автоматизации измерения параметров направленности антенны, в качестве носителя измерительного зонда используют беспилотный летательный аппарат (коптерного, самолетного или иного типа), совершающий круговые облеты измеряемой антенны, вдоль маршрута, представляющего собой сечения сферы радиусом R, превышающим расстояние, удовлетворяющее условию дальней зоны исследуемой антенны, в полностью автоматическом режиме. Определение глобальных координат БПЛА выполняется посредством бортового приемника сигналов глобальной навигационной спутниковой системы (ГНСС, в том числе ГЛОНАСС). Требуемая точность достигается за счет внесения полученных с контрольно-корректирующей станции (ККС) дифференциальных поправок в результат измерений в процессе постобработки. Этот вариант принимается за прототип.
Недостатком выбранного в качестве прототипа способа является отсутствие контроля взаимного расположения испытуемой антенны и зондовой антенны, а именно расположения оси, проходящей через фазовый центр зондовой антенны относительно фазового центра испытуемой антенны. В идеале для наиболее точных измерений параметров направленности антенны электрическая ось зондовой антенны всегда должна быть направлена на фазовый центр испытуемой. В противном случае возникают неустранимые методологические погрешности, в экстремальных случаях, подвергающих сомнению ценность измерений.
3. Раскрытие изобретения
Основной задачей, на решение которой направлено заявляемое изобретение, является разработка нового способа, обеспечивающего получение следующего технического результата: повышение точности, измерения параметров направленности антенны без коренного пересмотра технологии «Измерения параметров направленности антенны с помощью БПЛА методом облета» и вреда для автоматизации процесса.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что, с целью автоматизированного измерения параметров направленности антенны, в качестве носителя измерительного зонда используют беспилотный летательный аппарат (коптерного, самолетного или иного типа), а в качестве инструмента наведения используется гиростабилизированный подвес с подключенным контроллером наведения. Контроллер в автоматическом режиме управляет моторами подвеса и таким образом выдерживает направление зондовой антенны, закрепленной на подвесе на фазовый центр испытуемой антенны, координаты которого заносятся в память устройства перед началом измерений. Фактически устройство производит корректировки углов тангажа и рысканья зондовой антенны, в зависимости от расположения БПЛА относительно испытуемой, а также производит микрокорректировки позволяя устранить погрешности, связанные с колебаниями зондовой антенны в полете. Управление углом крена гиростабилизированного подвеса позволяет управлять поляризацией.
Определение глобальных координат БПЛА и его положения относительно испытуемой антенны выполняется посредством бортового приемника сигналов глобальной навигационной спутниковой системы (ГНСС, в том числе ГЛОНАСС). Эти данные также получает контроллер гиростабилизированного подвеса, который корректирует ориентацию антенны в режиме реального времени.
С целью сокращения влияния отражений от земли координату высоты точки наведения бортовой антенны выбирают таким образом, чтобы в направлении отраженного от земли луча было минимально возможное значение усиления бортовой антенны с учетом ее собственной ДН при сохранении приемлемой энергетики радиолинии.
4. Краткое описание чертежа
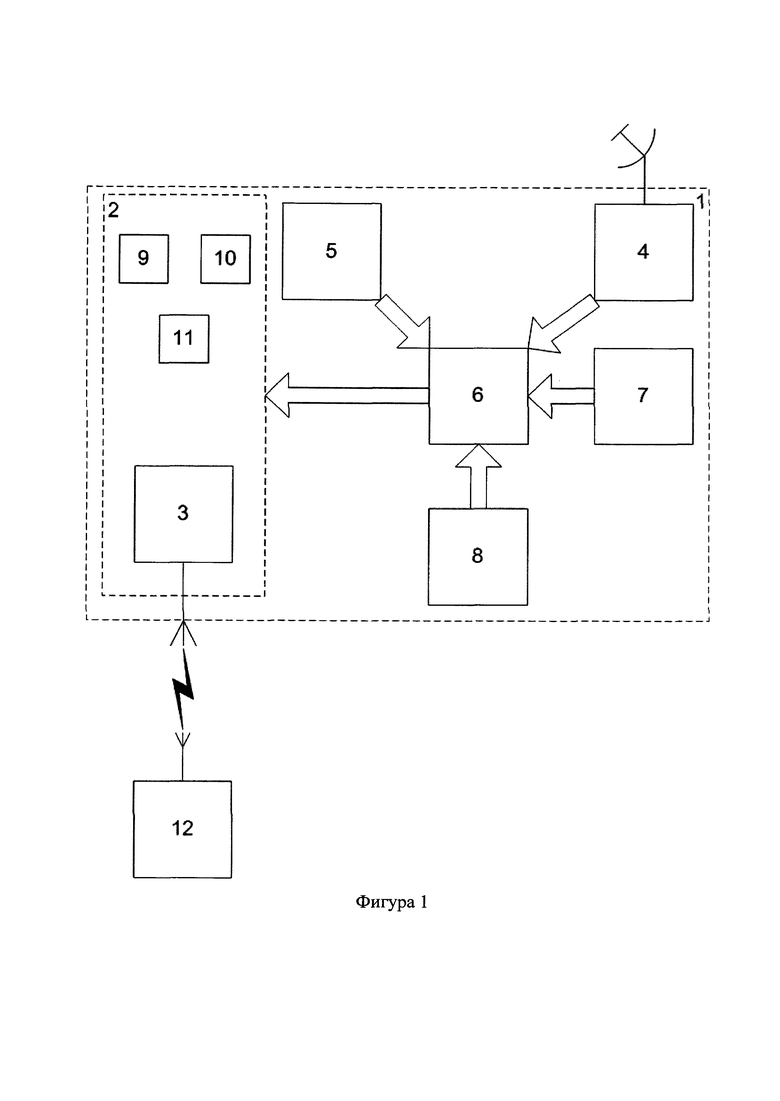
На фигуре 1 представлена схема системы автоматизированной ориентации бортовой антенны, состоящая из: беспилотного летательного аппарата - 1, бортовой антенны - 3, которая закреплена на гиростабилизированном подвесе - 2, включающем в себя стабилизирующий двигатель крена - 9, тангажа - 10 и рыскания 11, которые управляют направлением антенны - 3. Двигатели - 9, 10 и 11 подключены к контроллеру подвеса - 6, который соединен с компасом - 7, 3-х осевым инерциальным датчиком - 8, бортовым приемником сигналов ГНСС - 4, и бортовым барометром - 5. В память контроллера подвеса - 6 записаны глобальные координаты испытуемой антенны - 12.
5. Осуществление изобретения
Принцип ориентации антенны, фиг. 1, состоит в следующем.
Бортовая антенна - 3, закрепленная на гиростабилизированном подвесе - 2, при помощи стабилизирующих двигателей - 9, 10 и 11, работающих в режиме удержания - по крену, тангажу и рысканию и управляемых контроллером подвеса - 6, получающем данные об углах наклона платформы подвеса от 3-х осевого инерциального датчика - 8, а также от компаса - 7 для привязки к направлению на север. Данные на какой именно угол надо направить бортовую антенну в каждый конкретный момент контроллер подвеса - 6, получает из приемника ГНСС - 4 и из барометра - 5. В память контроллера подвеса - 6, также записаны глобальные координаты и координаты высоты испытуемой антенны - 12. Преобразовав глобальные координаты и координаты высоты в угловые координаты комплекса относительно испытуемой антенны, контроллер подвеса - 6 производит сравнение полученных углов с текущими углами ориентации, которые измерены инерциальным датчиком - 8 и компасом - 7. В случае несовпадения углов контроллер подвеса - 6 отправляет команду на двигатели 9, 10 и 11 скорректировать положение подвеса - 2 и, закрепленной на нем антенны - 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК НАПРАВЛЕННОСТИ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ В ЗОНЕ ФРЕНЕЛЯ С ПОМОЩЬЮ БЕСПИЛОТНОЙ АВИАЦИОННОЙ СИСТЕМЫ | 2022 |
|
RU2797461C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| Способ контроля диаграммы направленности антенны облетным методом с помощью БПЛА | 2022 |
|
RU2836791C2 |
| СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2023 |
|
RU2807022C1 |
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ В ДАЛЬНЕЙ ЗОНЕ МЕТОДОМ ОБЛЕТА С ПОМОЩЬЮ БЛА | 2021 |
|
RU2758979C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| Способ измерения максимальной плотности потока энергии электромагнитного поля в точках окрестности оси главного излучения антенны сотовой связи при помощи беспилотного летательного аппарата вертолётного типа | 2019 |
|
RU2777985C2 |
Изобретение относится к технике антенных измерений и может быть использовано для исследования диаграмм направленности (ДН) антенны методом облета. Способ автоматического измерения параметров направленности антенны методом облета в дальней зоне исследуемой антенны основан на применении беспилотного летательного аппарата (БПЛА). Измерительная бортовая антенна устанавливается на гиростабилизированный подвес, который в процессе облета ориентирует электрическую ось бортовой антенны в направлении на фазовый центр испытуемой антенны, изменяя в автоматическом режиме углы стабилизации гиростабилизированного подвеса, рассчитанные контроллером наведения на основе навигационных данных получаемых из приемника глобальной навигационной спутниковой системы (ГНСС). Технический результат заключается в повышении точности измерения направленных характеристик антенн. 2 з.п. ф-лы, 1 ил.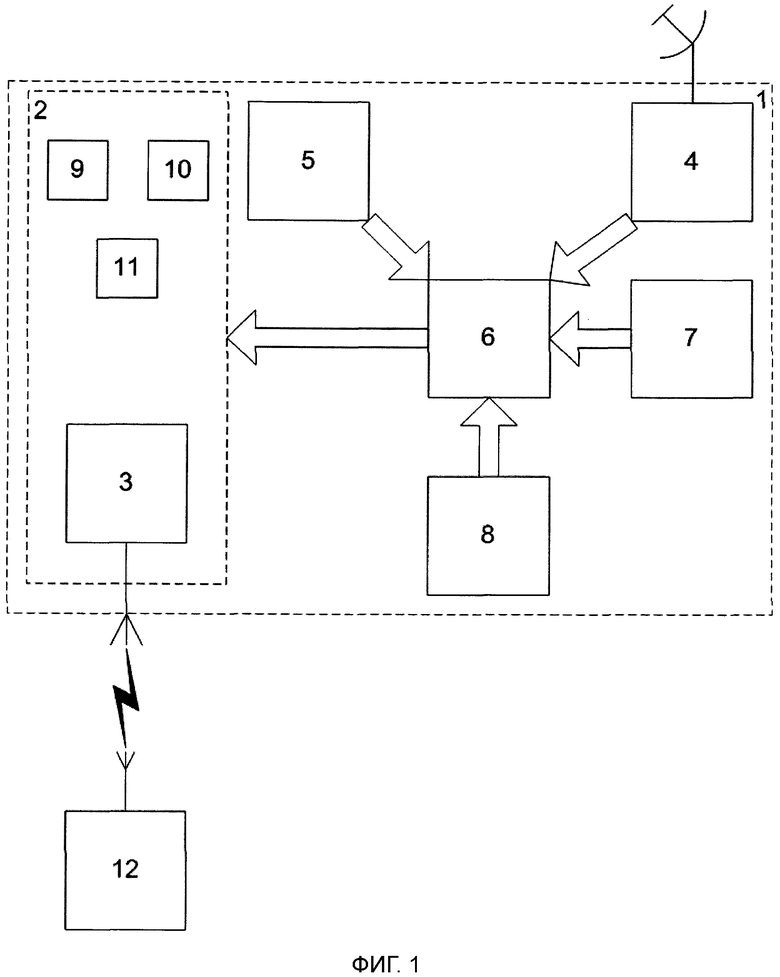
1. Способ автоматического измерения параметров направленности антенны методом облета в дальней зоне исследуемой антенны, основанный на применении беспилотного летательного аппарата (БПЛА), отличающийся тем, что с целью повышения точности измерений измерительная бортовая антенна устанавливается на гиростабилизированный подвес, который в процессе облета ориентирует электрическую ось бортовой антенны в направлении на фазовый центр испытуемой антенны, изменяя в автоматическом режиме углы стабилизации гиростабилизированного подвеса, рассчитанные контроллером наведения на основе навигационных данных получаемых из приемника глобальной навигационной спутниковой системы (ГНСС).
2. Способ автоматического измерения параметров направленности антенны методом облета в дальней зоне исследуемой антенны основанный на применении беспилотного летательного аппарата по п. 1, отличающийся тем, что с целью управления поляризацией излучения бортовой антенны управляют углом крена ϕ гиростабилизированного подвеса, при этом при ϕ=0, поляризация бортовой антенны горизонтальная, при ϕ=90 - вертикальная.
3. Способ автоматического измерения параметров направленности антенны методом облета в дальней зоне исследуемой антенны, основанный на применении беспилотного летательного аппарата по п. 1, отличающийся тем, что с целью сокращения влияния отражений от земли координату высоты точки наведения бортовой антенны выбирают таким образом, чтобы в направлении отраженного от земли луча было минимально возможное значение усиления бортовой антенны с учетом ее собственной ДН при сохранении приемлемой энергетики радиолинии.
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| Способ измерения диаграммы направленности антенны | 1988 |
|
SU1555688A1 |
| US 3879733 A, 22.04.1975 | |||
| US 10067172 B1, 04.09.2018. | |||

