Изобретение относится к технике охранной сигнализации и может быть использовано для охраны музейных экспонатов и любых предметов без ограничения веса и габаритов.
Известен ряд способов, решающих задачу охраны контролируемых объектов.
Одним из них является способ, описанный в патенте GB N 2199172A (МКИ2 кл. G 08 B 13/14). Данный способ предполагает непосредственное взаимодействие контролируемого объекта с устройством безопасности, посредством внедрения его деталей (главных и вспомогательных штырей) в контролируемый объект.
Эти действия недопустимы при охране музейных экспонатов, объектов предполагающих герметичные упаковки (вредные и ядовитые вещества, оболочки аппаратуры специального назначения), предметов из химически активных веществ, например, редкоземельных металлов, способных разрушить материал деталей устройства безопасности, находящихся с ними в контакте, объектов с размерами соизмеримыми с габаритами внедряемых деталей устройств безопасности.
Наиболее близким по технической сущности к заявляемому способу является способ охраны контролируемых объектов, заключающийся в том, что закрепляют контролируемый объект на элементе несущей арматуры, сравнивают текущее значение сигналов изменения состояния датчика, взаимосвязанного с элементом несущей арматуры, с соответствующими установившимися значениями. Датчик воспринимает силовую нагрузку от контролируемого объекта, фиксирует установившиеся значения этой нагрузки, при выходе за которые формирует тревожное сообщение.
К недостаткам описанного способа охраны контролируемого объекта следует отнести:
- ограничение по весу контролируемого объекта и силе к нему приложенной из-за прочностных свойств деталей нагруженных блоков систем охраны;
- снижение функциональной надежности вследствие воздействия веса охраняемого объекта или силы, к нему приложенной, непосредственно на детали блоков системы охраны, включая чувствительные элементы и преобразователи;
- наличие неконтролируемых перемещений охраняемого объекта при частичной разгрузке элементов блоков систем охраны;
- заниженная вероятность выдачи адекватного тревожного сообщения за счет работы только с одним параметром объекта охраны, а именно, с полными либо частичными весом или силой, приложенной к объекту охраны.
Техническим результатом изобретения является снятие ограничений по весу охраняемых объектов с одновременным повышением функциональной надежности и вероятности выдачи системами охраны адекватных тревожных сообщений.
Технический результат достигается тем, что элемент несущей арматуры выполняют в виде упругодеформируемого элемента и закрепляют с возможностью выведения датчика из-под воздействия веса контролируемого объекта и возможностью изменения состояния датчика при изменении состояния упругодеформируемого элемента, после окончания переходных процессов при монтаже формируют установившиеся значения состояния упругодеформируемого элемента, определяют временные и амплитудные границы изменения вышеуказанного состояния, при выходе за которые формируют тревожное сообщение.
Кроме того, текущие значения сигналов изменения состояния датчика являются текущими значениями напряженного состояния упругодеформируемого элемента. Кроме того, текущие значения сигналов изменения состояния датчика являются значениями пространственного положения упругодеформируемого элемента.
Кроме того, выбирают из ряда типоразмеров упругодеформируемого элемента типоразмер, исходя из чувствительности или массогабаритных параметров контролируемых объектов или вибрационных или ударных воздействий.
Для выполнения элементов несущей аппаратуры могут быть использованы специальные изготовленные из различных материалов упругодеформируемые элементы. Ряд типоразмеров таких элементов включают в комплект поставки систем охраны. Это позволяет на основе одного унифицированного блока первичных преобразователей, без ухудшения соотношения сигнал/шум, вызываемого использованием известного в этом случае приема - регулировки коэффициента усиления, реализовать охрану контролируемых объектов с целой гаммой массогабаритных характеристик. При закреплении контролируемого объекта на несущей арматуре в последней возникают переходные процессы, сопровождаемые изменениями напряженного состояния и пространственного положения элементов несущей арматуры. Длительность переходных процессов определяют по инерционно-упругим свойствам механической системы, состоящей из несущей арматуры и закрепленного на ней контролируемого объекта. Диапазон возможных инерционно-упругих свойств механических систем используют при задании ряда типоразмеров упругодеформируемых элементов. При этом за счет согласования свойств механической системы "несущая арматура + охраняемый объект", например, таких как частота собственных колебаний, повышают защищенность от ложных тревожных сообщений при охране в условиях воздействия вибрационных и ударных нагрузок. После окончания переходных процессов, возникающих при монтаже систем охраны, фиксируют установившиеся значения напряженного состояния и пространственного положения выбранных элементов несущей арматуры.
Причем для достижения наибольшей эффективности работы систем охраны фиксацию напряженного состояния производят на любом выбранном элементе несущей конструкции, включая и устанавливаемый специально для этого упругодеформируемый элемент, при этом пространственное положение и напряженное состояние фиксируют как для разных, так и для одного и того же элемента несущей арматуры.
Далее по сигналам преобразователей чувствительных элементов отслеживают текущие напряженное состояние и пространственное положение соответствующих ранее выбранных элементов несущей арматуры. Затем определяют разницу между соответствующими установившимися и текущими значениями. Исходя из рабочих проектов установки систем охраны и моделей нарушителей определяют граничные значения напряженного состояния и пространственного положения выбранных элементов несущей арматуры относительно их установившихся значений. Если полученные текущие значения выходят соответственно хотя бы за одну из установленных границ, формируют сигнал тревожного сообщения.
Предложенный способ охраны контролируемого объекта поясняют графические материала фиг. 1, 2, 3, 4.
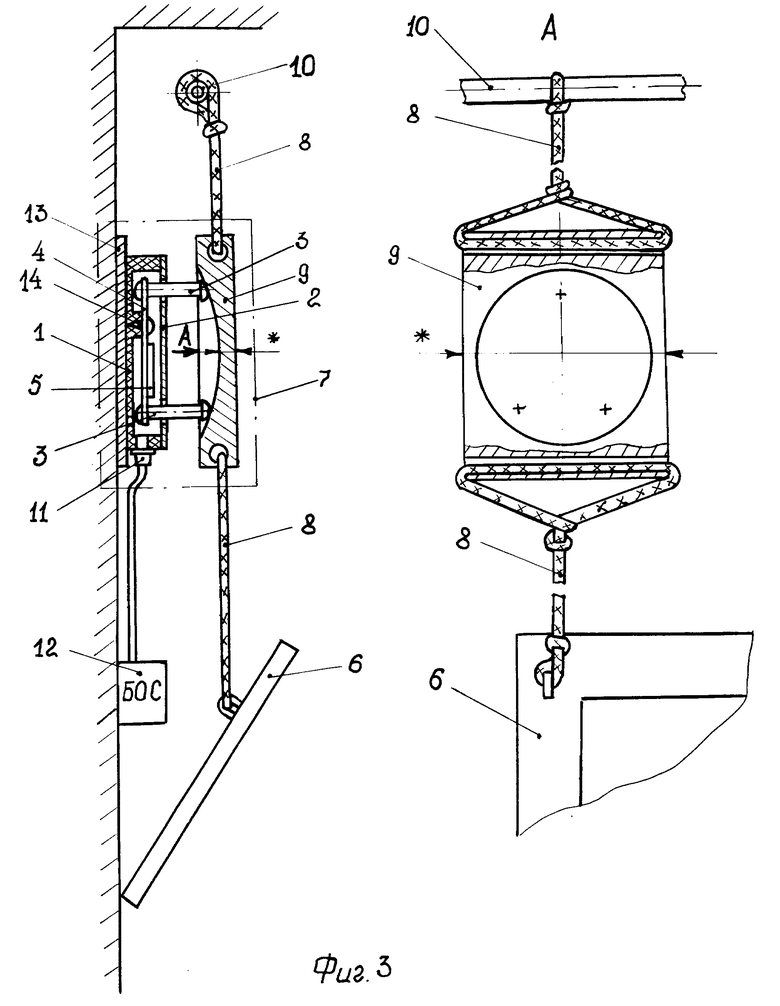
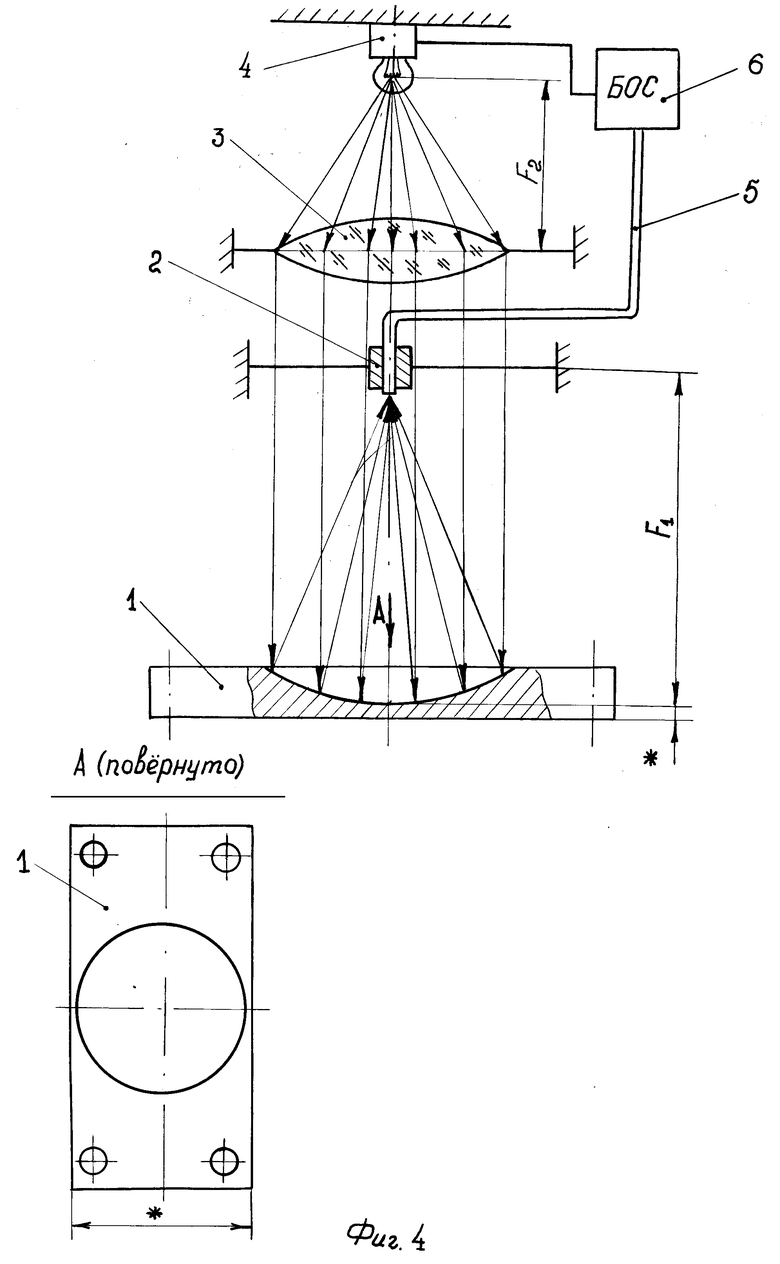
На фиг. 1, 2 изображено пьезоэлектрическое устройство охраны, реагирующее на изменение напряженного состояния и пространственного положения шнура, на котором закреплен охраняемый объект. На фиг. 3 изображено пьезоэлектрическое устройство охраны, в котором использован специально изготовленный упругодеформируемый элемент арматуры. На фиг. 4 представлено оптическое устройство охраны, так же использующее специально изготовленный упругодеформируемый элемент арматуры.
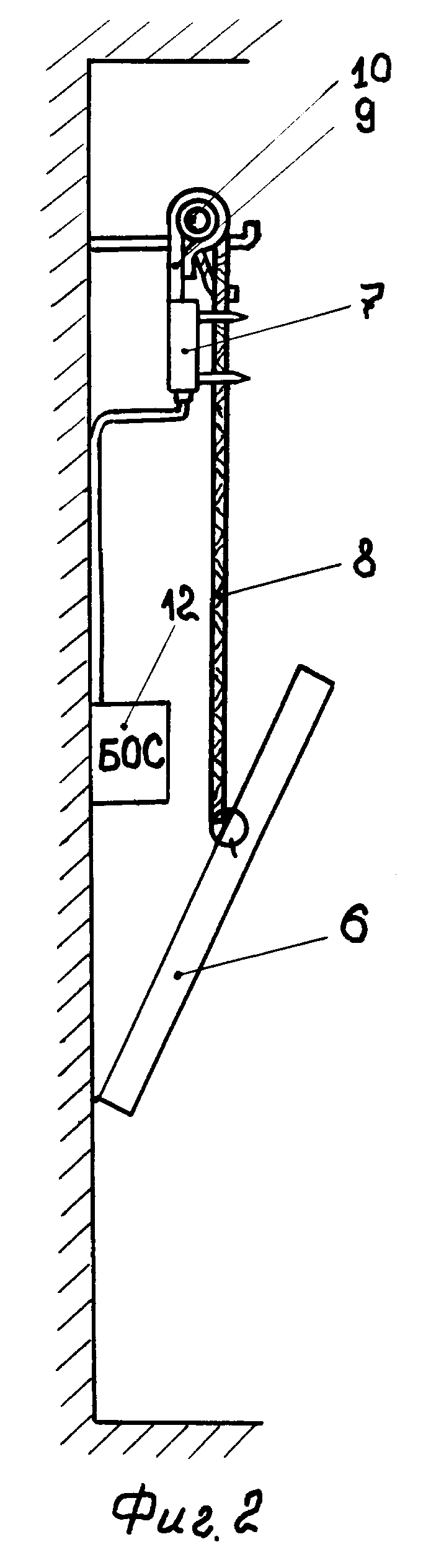
Устройство охраны контролируемого объекта (фиг.1, 2, 3) содержит корпус 1, крышку 2, штыри 3, чувствительный элемент 4, пьезоэлемент 5, контролируемый объект 6, датчик 7, крепежный шнур 8, скобу 9, несущую арматуру 10, выходной разъем 11, блок обработки сигналов (БОС) 12, прокладки 13, винт-саморез 14.
Элементы устройства охраны контролируемого объекта расположены следующим образом (фиг. 1, 2).
Корпус 1 датчика 7 жестко связан с помощью скобы 9 с несущей арматурой 10. Внутри корпуса на приливах винтами 6 закреплен чувствительный элемент 4, на который наклеен пьезоэлемент 5. Сигналы с пьезоэлемента подаются через выходной разъем 11 на вход БОС 12. На основе моделей нарушения рубежей охраны контролируемого объекта в БОС 12 устанавливаются граничные значения амплитудных и временных параметров сигналов с пьезоэлемента 5 датчика 7, выход за которые требует выдачу тревожного сообщения.
На чувствительном элементе 4 жестко установлены штыри 3, свободно проходящие через крышку 2, смонтированную с помощью винтов на корпусе 1 датчика 7. При установке датчика 7 штыри 3 прокалывают крепежный шнур 8, на котором свободно или консольно закрепляют контролируемый объект 6.
Принятие объекта под охрану происходит после завершения переходных процессов в системе "несущая арматура + контролируемый объект", связанных с установкой блоков устройства охраны и контролируемого объекта 6. При этом подается питание на БОС 12. В установившемся состоянии сигнал с пьезоэлемента 5 не поступает. При попытке отсоединения контролируемого объекта 6 от крепежного шнура 8 происходит изменение напряженного состояния последнего, что вызывает через штыри 3 изменение напряженного состояния чувствительного элемента 4 и закрепленного на нем пьезоэлемента 5. Аналогичные действия на пьезоэлемент 5 оказывает и попытка отклонения контролируемого объекта от его первоначального положения. Кроме того, на чувствительный элемент 4 дополнительно воздействуют механические возмущения, связанные со скольжением крепежного шнура 8 по поверхности штырей 3. Все перечисленные механические возмущения вызывают на обкладках пьезоэлемента разность потенциалов с соответствующими временными и амплитудными параметрами. Превышение этими сигналами значений параметров, установленных в БОС 12, вызывает формирование тревожного сообщения.
На основе описанного устройства можно организовать охрану контролируемых объектов без ограничения по массе и габаритам. При этом в зависимости от веса контролируемого объекта 6 выбирают крепежный шнур с такими характеристиками, чтобы его напряженное состояние на базовой длине датчика 7 находилось в области работы чувствительного элемента 4 датчика 7.
На фиг. 3, 4 показаны устройства охраны контролируемого объекта, в которых элементом несущей арматуры служит упругодеформируемый элемент, который выбирают из ряда типоразмеров, поставляемого в комплекте с системами охраны, отмечены отличительные размеры упругодеформируемых элементов из этого ряда.
Устройство фиг. 3 построено на базе устройства, представленного на фиг. 1, 2. Конструктивные отличия заключаются в реализации взаимодействия датчика 7 устройства с элементами несущей арматуры 8, 10 через выбранный упругодеформируемый элемент 9 из ряда типоразмеров, поставляемого в комплекте с устройством.
С целью фиксирования пространственного положения упругодеформируемого элемента 9 относительно корпуса 1 датчика 7 в него введен дополнительный штырь, аналогичный штырям 3, и место крепления штыря 3, наиболее удаленное от точек крепления чувствительного элемента 4 к приливам корпуса 1 фиг.3. Этот штырь и вновь введенный жестко установлены на чувствительный элемент симметрично относительно вертикальной оси датчика таким образом, что в плоскости чувствительного элемента образуют равнобедренный треугольник.
Расположение штырей поясняет схема касания штырей 3 сферической поверхности упругодеформируемого элемента 9, представленная на виде А фиг.3. Точки касания отмечены x. Кроме того, изменена форма головной части штырей 3 с целью облегчения их перемещения по сферической поверхности упругодеформируемого элемента 9.
Исходя из массогабаритных характеристик объекта контроля и условий охраны (воздействий ударных и вибрационных ускорений), из поставляемого в комплекте устройства охраны ряда типоразмеров выбирается упругодеформируемый элемент, через отверстия которого пропускают крепежный трос 8, посредством которого закрепляют контролируемый объект 6, как это показано на фиг.3. При этом вес контролируемого объекта воздействует на упругодеформируемый элемент, изменяя кривизну сферической поверхности. Далее на стене помещения крепится блок обработки сигналов БОС 12. Затем, отводя упругодеформируемый элемент в сторону по стрелке А, под его сферическую поверхность вводится приемный блок датчика 7, состоящий из корпуса 1 с смонтированными на нем и внутри него деталями. Прокладками 13 выбирается оптимальная область чувствительности приемного блока, после чего упругодеформируемый элемент плавно отпускают. Возвращаясь, он осуществляет поджатие чувствительного элемента 4 через штыри 3 на величину, определяемую толщиной прокладки 13, равномерное нагружение всех штырей приемного блока за счет возможности перемещения по поверхности прокладки 13 корпуса 1 и крепление поджатием приемного блока и прокладки 13 датчика 7 к поверхности стены помещения.
Принятие объекта 6 под охрану происходит после завершения переходных процессов в системе "несущая арматура + упругодеформируемый элемент + контролируемый объект", связанных с установкой блоков устройства охраны и контролируемого объекта 6. При этом подается питание на БОС 12. На основе моделей нарушения рубежей охраны контролируемого объекта в БОС 12 устанавливают граничные значения амплитудных и временных параметров сигналов с пьезоэлемента 5 датчика 7, выход за которые требует выдачу тревожного сообщения.
При попытке снятия объекта охраны с несущей арматуры изменяется пространственное и напряженное состояние упругодеформируемого элемента 9, что приводит к изменению напряженного состояния чувствительного элемента 4 датчика 7 посредством перемещения штырей 3 по сферической поверхности упругодеформируемого элемента 9 и появлению сигнала на обкладках пьезоэлемента 5. Этот сигнал через разъем 11 и соединительный кабель поступает на вход БОС 12 и после обработки по амплитуде, частоте и времени будет вызывать в соответствии с принятой моделью нарушения рубежей охраны контролируемого объекта появление на выходе БОС 12 тревожного сообщения.
Устройство охраны, представленное на фиг. 4, так же как и устройство охраны фиг.3, предполагает выбор и установку упругодеформируемого элемента 1 из ряда типоразмеров, отмеченных (x), входящих в комплект поставки устройства охраны.
При этом не предполагается механический контакт с элементами несущей арматуры, что позволяет организовать с помощью такого устройства охрану контролируемых объектов, находящихся в агрессивных, оптическипрозрачных средах.
Особенности работы устройства охраны фиг.4 позволяют реализовать самые различные варианты несущей арматуры от подвесов до подставок. При этом упругодеформируемый элемент 1 выбирается, исходя из массо-габаритных характеристик контролируемого объекта, и включается в состав несущей арматуры с помощью 4-х посадочных отверстий. На упругодеформируемом элементе выполняется зеркальная сферическая поверхность, которая, деформируясь под действием веса контролируемого объекта или силы к нему приложенной, изменяет радиус своей крутизны. В установившемся фокусе F1 этой поверхности помещается в оправке 2 срез световода 5, передающего световой сигнал в БОС. С целью создания параллельного хода лучей источника облучения используется оптическая линза, в фокусе F2 которой помещается источник излучения, получающий энергию от БОС 6.
На основании моделей нарушения рубежей охраны контролируемого объекта в БОС 6 вводятся граничные значения параметров светового потока, выход за которые требует выдачу тревожного сообщения.
После завершения переходных процессов, связанных с установкой контролируемого объекта на несущую арматуру, на БОС 6 подается питание. Включается источник излучения 4 и световой поток, проходя через линзу 3, падает на сферическую поверхность упругодеформируемого элемента 1 и фиксируется ею на срезе световода 5. Энергия светового потока достаточная для удержания схемы оповещения БОС 6 в выключенном состоянии.
При попытке снятия контролируемого объекта с несущей арматуры происходит изменение напряженного состояния упругодеформируемого элемента 1, что вызывает изменение установившегося значения радиуса кривизны его сферической поверхности F1, а следовательно, и оснащенности среза световода 5. Попытка перемещения контролируемого объекта приводит к смещению упругодеформируемого элемента и образованного им фокусного светового пятна со среза световода 5. Как в первом, так и во втором случае будут нарушены установленные граничные значения светового потока, что приведет к выдаче тревожного сообщения схемой оповещения БОС 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОХРАНЫ ПЕРИМЕТРА ОБЪЕКТА | 2012 |
|
RU2473970C1 |
| УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1996 |
|
RU2124232C1 |
| СПОСОБ ОХРАНЫ КОНТРОЛИРУЕМОГО ПРЕДМЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2281558C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ ЗОНЕ | 1996 |
|
RU2130646C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА НЕДВИЖИМОСТИ | 2009 |
|
RU2390851C1 |
| СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2005 |
|
RU2269437C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |
| СПОСОБ РАДИОСВЯЗИ МЕЖДУ ОХРАНЯЕМЫМИ ОБЪЕКТАМИ И ПУНКТОМ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ | 2005 |
|
RU2278415C1 |
| Способ контроля несанкционированного доступа на объект с использованием инфракрасного датчика в энергоэффективных беспроводных сетях | 2022 |
|
RU2791598C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА МОНИТОРИНГА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2240938C1 |
Изобретение относится к технике охранной сигнализации и может быть использовано для музейных экспонатов и любых предметов без ограничения веса и габаритов. Техническим результатом изобретения является снятие ограничений по весу охраняемых объектов с одновременным повышением функциональной надежности и вероятности выдачи системами охраны адекватных тревожных сообщений. Технический результат достигается тем, что элемент несущей арматуры выполняют в виде упругодеформируемого элемента, закрепляют его с возможностью выведения датчика из-под воздействия веса контролируемого (охраняемого) объекта , при этом датчик изменяет состояние при изменении состояния упругодеформируемого элемента. Формируют тревожное сообщение при выходе за границы изменения состояния упругодеформируемого элемента. 3 з.п. ф-лы, 4 ил.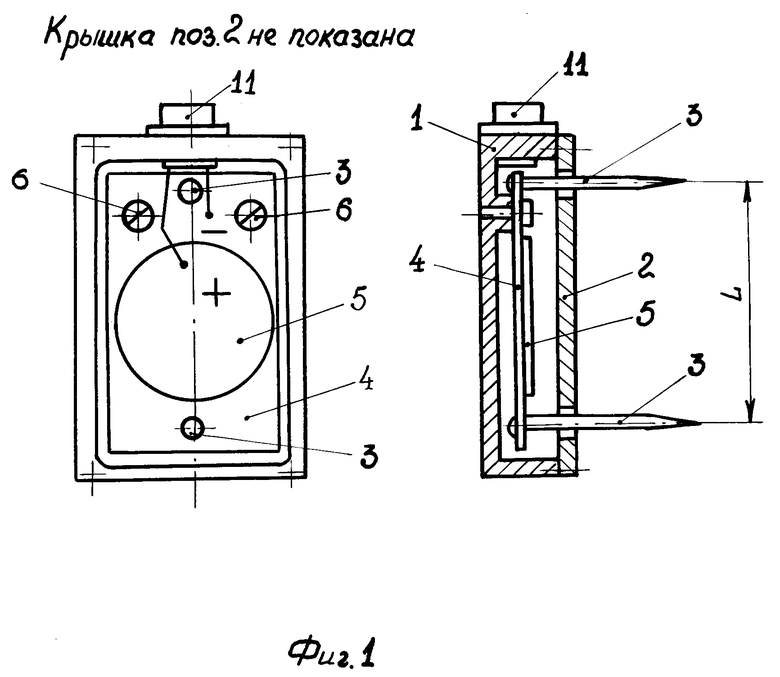
| Датчик для устройств охранной сигнализации | 1990 |
|
SU1836704A3 |
| СПОСОБ ПОЛУЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ИЗ ПРИРОДНОГО ГАЗА С ИСПОЛЬЗОВАНИЕМ ТОПЛИВНОГО ЭЛЕМЕНТА НА ТВЕРДОМ ОКИСЛЕ | 1998 |
|
RU2199172C2 |
| Приспособление к ручному багажу для сигнализирования о краже | 1927 |
|
SU6208A1 |
