Изобретение относится к области телемеханики и технических средств охраны (ТСО) важных объектов и границ на основе извещателей, датчиков или сенсоров, использующих различные физические принципы обнаружения нарушителей. Он может быть использован для повышения сигнализационной надежности существующих и разрабатываемых извещателей в различных условиях их эксплуатации, в том числе при действии помех различного происхождения. При этом под сигнализационной надежностью понимают повышение вероятности обнаружения нарушителя, с одной стороны, и одновременное уменьшение вероятности ложных срабатываний технических средств охраны (ТСО), приводящих к формированию сигналов ложной тревоги, с другой стороны.
Известен «Способ охраны периметра объекта» ([1], RU 2263968, МПИ7 G08B 13/02). Он обеспечивает охрану различных типов ограждений от перелаза, разрушения и подкопа. Данный способ предполагает установку ограждения, монтаж чувствительного элемента (ЧЭ) на фланг протяженного ограждения, определение амплитудно-частотных характеристик сигнала, получаемого от ЧЭ, характерных для преодоления нарушителем ограждения методом перелаза, разрушения или подкопа, обработку текущего значения сигнала с ЧЭ и по мере получения определенных ранее характеристик сигнала - выдачу тревожного сообщения.
К недостаткам данного способа охраны следует отнести:
- большие затраты на монтаж и настройку оборудования, вызванные сложностью выполняемых работ по обеспечению охраны важных объектов с использованием инженерных сооружений заградительного типа;
- большие затраты при необходимости изменения границ охраняемой территории;
- отсутствие функции определения способа преодоления нарушителем ограждения;
- снижение вероятности обнаружения и повышение вероятности ложных срабатываний при воздействии климатических факторов: ветровых нагрузок, обледенения, снежных заносов и температуры окружающей среды.
Наиболее близким из известных аналогов является «Способ охраны периметра объекта» ([2], патент 2473970 С1, МПИ7 G08B 13/02, опубликованный 27.01.2013г., бюл. №3), заключающийся в том, что устанавливают чувствительный элемент (ЧЭ) извещателя на участке ограждения, устанавливают признаки сигнала, определяющие преодоление нарушителем ограждения, фиксируют полученные значения сигналов с чувствительных элементов и выделяют из них признаки, свойственные нарушителю, сравнивают значение с их установленной величиной и по результатам сравнения определяют момент выдачи сигнала тревоги, отличающийся тем, что выделяют конструктивно законченный элемент ограждения, исходя из его пространственных параметров, определяют зоны воздействия на него нарушителя в процессе преодоления способом перелаза, формируют независимые зоны чувствительности на полотне ограждения, определяют последовательность появления сигналов из сформированных зон чувствительности и предельные значения времени между сигналами этой последовательности, получают сигналы из зон чувствительности и сравнивают полученный порядок формирования сигналов с определенной ранее последовательностью, а также интервалы времени между сигналами из независимых зон чувствительности, в случае совпадения полученного порядка с определенной последовательностью и нахождения времени между сигналами из независимых зон чувствительности в определенных изначально временных интервалах, выдают сигнал тревоги.
Способ [2] по п. 1 также отличается тем, что определяют зоны воздействия нарушителя на ограждение в процессе преодоления способом контроля разрушения инженерного сооружения заградительного типа и устанавливают порядок появления сигналов в определенных ранее зонах чувствительности.
При этом в качестве извещателя используют генератор частоты с включенным в его частотнозадающую цепь емкостным ЧЭ, оказывающим влияние на частоту генератора.
К недостаткам способа охраны периметра ([2],) следует отнести:
- повышение вероятности ложных срабатываний при нахождении в непосредственной близости с ЧЭ подвижных предметов, например, стаи птиц;
- необходимость контроля состояния пространства, окружающего заграждение;
- необходимость контроля состояния чувствительных элементов и извещателей и оперативной оценки влияния на них погодных условий для осуществления необходимой регулировки порогов, превышение которых приводит к формированию сигналов тревоги;
- невозможность определения места проникновения нарушителя в пределах одного чувствительного элемента;
- недостаточную сигнализационную надежность извещателя, для повышения которой используют сигнализационное заграждение, что не представляет возможным при использовании технических средств охраны (ТСО) незаградительного типа.
Также к числу общих недостатков существующих способов и технических средств охраны, использующих различные чувствительные элементы (ЧЭ) и извещатели, на основе сигналов которых формируют сообщения тревоги, следует отнести:
- ориентацию на системы охраны объектов заградительного типа, предполагающего установку заграждений, что не всегда возможно, прежде всего, из-за необходимости значительных затрат и времени на их возведение, однако при отсутствии заграждений существенно повышаются требования к сигнализационной надежности извещателей, которые при существующей системе обработки формируемых сигналов и получаемой информации не могут быть обеспечены;
- невозможность поддержания сигнализационной надежности ЧЭ и извещателей на требуемом уровне, что связано с ростом числа воздействий на ЧЭ и извещатели, которые воспринимаются ими в качестве помех и приводят, в итоге, к уменьшению вероятности обнаружения нарушителя и к сокращению интервалов времени между сигналами ложных тревог (этот недостаток становится одним из основных при искусственно формируемых воздействиях на ЧЭ, извещатели, системы сбора информации и каналы связи);
- наличие ситуаций, при которых наблюдаются ограниченные возможности обнаружения фактов проникновения нарушителей на охраняемые зоны и территории при использовании ЧЭ и извещателей одного типа, отсутствие достаточно эффективных способов комплексирования сигналов ЧЭ и извещателей, использующих различные физические принципы обнаружения фактов нарушений;
- отсутствие возможности оперативного контроля правильности функционирования извещателей, оценивания показателей достоверности формируемых ими данных и сигналов и обеспечения самонастройки извещателей, систем сбора информации и устройств принятия решений под изменившиеся условия эксплуатации, определяемые изменением состояния внешней среды под влиянием различных погодных влияний и появляющимися при этом помехами, что, в конечном итоге, приводит к увеличению вероятности формирования сообщений ложной тревоги (только в ряде случаев используют самоконтроль в виде самотестирования ЧЭ и извещателей, которые проводят по истечению заданного времени или циклов работы [2]);
- недостаточно эффективное использование современных цифровых методов обработки сигналов, обеспечивающих повышение сигнализационной надежности ЧЭ и извещателей (обработку данных и сигналов, если и используют, то после сбора информации от извещателей по каналам связи (проводным или беспроводным), которые не обладают требуемыми показателями помехоустойчивости, из-за чего растет неопределенность при принятии решений);
- отсутствие способов групповой обработки данных и сигналов однотипных и разнотипных ЧЭ и извещателей.
Также к одному из существенных недостатков существующих способов обработки сигналов ТСО следует отнести ориентацию на обработку сигналов и информации, сосредоточенную в одном месте (в центре сбора и обработки (ЦСО), который, как правило, одновременно является и центром анализа и принятия решений). У такого подхода есть множество недостатков, в том числе, связанных со значительным увеличением объемов собираемой и передаваемой информации в центр сбора и обработки (ЦСО). Кроме того, он является препятствием к реализации и расширенному использованию адаптивных принципов построения ТСО, ориентированному на извещатели со свойствами искусственного интеллекта (интеллектуальные извещатели, которые широко рекламируют их изготовители).
Предлагаемая распределенная обработка сигналов и получаемой при этом информации приближает существующие ТСО и их перспективные разрабатываемые аналоги к уровню адаптивных и интеллектуальных.
Существующая практика показывает, что на ЧЭ и формируемые сигналы извещателей, оказывает существенно большее влияние по сравнению с воздействием, вызываемым человеком-нарушителем, проезд на относительно небольшом удалении от охраняемой территории различных транспортных средств, в особенности железнодорожного транспорта. В результате этого, проход запрещенной зоны нарушителем оказывается незамеченным, если он по времени совпадает с их проездом. Автомобильные дороги могут проходить также на малом расстоянии от зоны охраны, измеряемом десятками метров, при этом проезд тяжелогруженого автомобиля способен вызвать такую реакцию сейсмических датчиков, сенсоров и извещателей, которая по используемым показателям сигнальных признаков значительно превышает их отклик на проход человека-нарушителя. В итоге, несмотря на наличие ТСО, по-прежнему, основной труд по определению фактов нарушения охраняемых объектов и границ должны выполнить тревожные группы охраны и обороны.
Поэтому, одно из основных требований, которые предъявляются к создаваемым ТСО, заключается в обеспечении высокой вероятности определения факта нарушения контролируемой территории при охране важных объектов, зон охраны границ и большого времени между ложными тревогами. Многие из таких требований не могут быть обеспечены при существующих способах охраны рубежей важных объектов и границ. Основная причина этого заключается в следующем:
- в отсутствии возможности самоконтроля надежности функционирования ЧЭ, извещателей, невозможность обеспечения требуемых показателей помехоустойчивости систем сбора информации и устройств принятия решений о формировании сигналов тревоги, из-за чего существующие и разрабатываемые извещатели имеют низкую сигнализационную надежность;
- в невозможности выделения сигналов о нарушении охраняемых периметров, зон и границ на фоне маскирующих помех естественного происхождения и искусственно формируемых в условиях информационно-технических воздействий (ИТВ) и радиоэлектронного противоборства;
- в отсутствии методов и аппаратно-программных средств обработки сигналов и формируемой информации, обладающих свойствами адаптации (приспособления) к изменяющимся внешним условиям эксплуатации и помехам различного происхождения.
Для борьбы с ними недостаточно используются адаптивные принципы телеизмерений, обработки полученной информации и принятии решений о выдаче тревожного сообщения.
Известны способы адаптации средств телеизмерений к изменяющимся внешним условиям и помехам ([3], патент RU №2571584 С1, опубл. 10.10.2015, бюл. №35: «Способ передачи телеметрической информации, адаптированный к различным ситуациям, проявляющимся при проведении испытаний ракетно-космической техники, и система для его осуществления»; ([4], патент RU №2480838 С1, опубл. 25.04.2013, бюл. №21 - 16 с.: «Способ передачи ТМИ, адаптированный к неравномерности потока данных телеизмерений, и система для его осуществления»), которые можно по используемым принципам адаптации разделить на два основных типа. Первый наиболее распространенный среди них, представленный в [3], предполагает наличие в составе датчиков, сенсоров и извещателей средств контроля различных воздействий, в том числе и помех, определяющих их влияние на формируемые информационные параметры и сигналы. Результаты выполненного ими анализа воздействий и вызываемых при этом помех используют затем в устройствах принятия решений по изменению параметров настроек сигналов датчиков, например, частоты их дискретизации. Однако такой подход требует создания специальной системы мониторинга, которая бы контролировала применение специальных воздействий и изменяющихся внешних условий эксплуатации.
Способ [4] ориентирован на использование второго направления адаптации к изменяющимся внешним условиям функционирования ЧЭ и извещателя в целом. Его основу составляют структурно-алгоритмические преобразования (САП) цифровых сообщений. В ранее поданной заявке №2017124869/12(042953)) ([5], «Способ оперативно-технической охраны рубежей объектов и границ») структурно-алгоритмические преобразования (САП) цифровых сигналов извещателей используют для компенсации внешних воздействий, не связанных с нарушениями рубежей и границ зон охраны.
Один из известных способов, использующий первый тип адаптации, - это ([3], патент RU №2571584 С1, опубл. 10.10.2015, бюл. №35: «Способ передачи телеметрической информации, адаптированный к различным ситуациям, проявляющимся при проведении испытаний ракетно-космической техники, и система для его осуществления»). Его принципиальное отличие от других адаптивных систем телеизмерений заключается в том, что «… в реальном масштабе времени на основе показателей достоверности априорного выбора частот опроса телеметрируемых параметров, который производят на основе определения текущего уровня соответствия между контролируемыми физическими процессами и формируемыми в результате дискретизации их по времени первичными телеметрическими сигналами, отображающими телеметрируемый параметр, осуществляют его мониторинг с определением оценки дисперсии случайной помехи, присутствующей в телеизмерениях, по результатам мониторинга для каждого из контролируемых телеметрируемых параметров принимают решение либо об увеличении частоты его опроса, либо о его понижении до ранее принятых частот (временных интервалов опроса) в зависимости от того превышают ли определяемые оценки текущей дисперсии установленных для каждого из телеметрируемых параметров пороговых значений или нет».
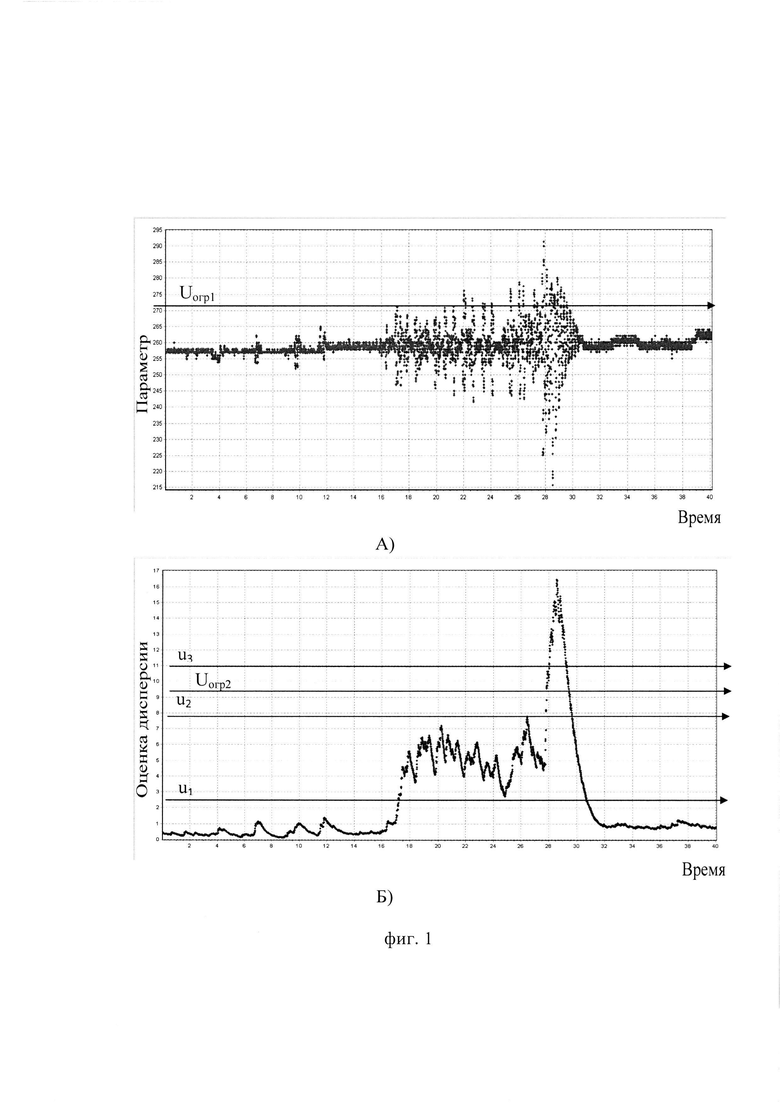
На фиг. 1 приведены графики: А) представления значений телеметрируемых параметров (ТМП) во времени и Б) вычисленные оценки дисперсии случайной помехи в измерениях (σ2v(t)), используемые в патенте [3]. В патенте [3] оценки дисперсии (σ2v(t)) случайной помехи при использовании алгоритмов адаптивной нелинейной фильтрации (АНФ) были использованы для решения следующих задач: 1) мониторинга соответствия выбранных частот опроса датчиков той ситуации, которая наблюдается при испытаниях образцов ракетно-космической техники (РКТ) и 2) адаптивного изменения частот опроса извещателей, сенсоров и датчиков, включая их повышение при превышении оценок дисперсии, полученных при использовании алгоритмов АНФ, некоторого заранее установленного уровня ui (порога сравнения), где i = 1,2,3 для примера, представленного на фиг. 1(Б).
График соответствующего изменения во времени вычисленных оценок дисперсии случайной помехи в измерениях (σ2v(t)), приведенный на фиг. 1(Б), можно условно разделить на три области: 1) первая, находящаяся ниже порога ограничения u1, свидетельствует о том, что выбранные при формировании цифрового сигнала частоты опроса значений телеметрируемого параметра (ТМП), на временном участке, имеющем условное обозначение от 0 до 17, выше требуемых для обеспечения точного воспроизведения данных телеизмерений; 2) вторая область, заключенная между уровнями порогов u1 и u2 и имеющая условное временное обозначение от 17 до 27, отличается тем, что исходная (не меняющаяся) частота пороса ТМП соответствует требуемому значению; 3) третья область, имеющая условное временное обозначение от 27 до 30, отличается тем, что исходная частота опроса ТМП оказалась меньше требуемой для обеспечения точного воспроизведения данных телеизмерений. Следовательно, восстановленные на временном участке, имеющем условное обозначение от 27 до 30, данные телеизмерений не позволяют адекватно воспроизвести контролируемый процесс.
Телеметрируемый параметр, представленный на фиг. 1(А), выбран в качестве примера при описании данной заявки на изобретение, поскольку он по своему графическому представлению имеет много общего с цифровыми сигналами некоторых извещателей технических средств охраны (ТСО). Отличительные особенности сигнала, формируемого извещателем ТСО, заключаются в том, что при воздействии на него, оказываемом при прохождении нарушителем рубежей объектов и границ, проявляются в разрушении его тонкой структуры - происходит его разладка по сравнению с тем, что было ранее и что будет после. В изобретении [3] это проявляется в значительном увеличении значений оценок дисперсии случайной помехи, присутствующей в телеизмерениях. Это является свидетельством того, что заранее выбранная на основе теоремы В.А. Котельникова частота опроса ТМП не соответствует реальной ситуации, появившейся при испытании контролируемого объекта. Далее по результатам мониторинга для каждого из ТМП принимают решение либо об увеличении или об уменьшении частоты опроса его аналоговых значений.
В данном изобретении эту особенность, связанную с быстрым увеличением оценок дисперсии случайной помехи, можно также использовать для разрешения основного противоречия ТСО, заключающегося в одновременном повышении вероятности обнаружения нарушителя и увеличении временных интервалов между ложными тревогами. Традиционный способ определения нарушителя заключается в том, что значения формируемого извещателем сигнала сравнивают с заранее выставленным порогом Uогр1 и в случае, когда он превышает его в течение некоторого установленного интервала времени ΔТ, формируют сигнал тревоги.
Проведенные исследования показали, что амплитуда изменений во времени оценок дисперсии случайной помехи σ2v(t), оказывается более информативной по сравнению с традиционно используемыми способами обнаружения нарушителя с точки зрения решения конечной задачи - повышения сигнализационной надежности извещателей.
Из сравнения графиков, приведенных на фиг. 1(А) и фиг.1(Б), следует, что оценки дисперсий случайной помехи (σ2v(t)), а еще лучше дисперсии σ2ω(t) формирующего шума ω(t) - для аналоговых ТМП и дисперсии σ2wk формирующего шума dwk - для контролируемых процессов, представленных в цифровом виде, вычисляемые при использовании предлагаемых алгоритмов АНФ, способствуют либо разрешению отмеченного основного противоречия ТСО, либо смягчению его проявлений. Так, оценки дисперсий σ2ω(t) формирующего шума ω(t) имеют пониженную чувствительность к низкочастотным составляющим исходного нестационарного случайного процесса, которым является и формируемый извещателем сигнал. Следовательно, использование вместо дисперсии случайной помехи в измерениях σ2v(t) дисперсии σ2ω(t) формирующего шума ω(t) - для аналоговых ТМП и дисперсии σ2wk формирующего шума dwk - для контролируемых процессов, представленных в цифровом виде при применении на этапе обработки сигналов, сформированных извещателями, алгоритмов адаптивной нелинейной фильтрации (АНФ) позволяет дополнительно повысить сигнализационную надежность ТСО.
При этом по отношению к изменяющимся во времени оценкам дисперсий σ2ω(t) формирующего шума ω(t) для непрерывных процессов, использующих аналоговую форму представления значений, и дисперсии σ2wk формирующего шума dwk - для их аналогов, представленных в цифровом виде, можно выставить не один, а несколько порогов ограничений. В предлагаемом изобретении используют три порога ограничения u1, u2 и u3, что необходимо для идентификации различных событий, связанных с отсутствием помех, их наличием и с нарушением рубежей охраняемых объектов и границ.
Основу мониторинга, используемого в патенте [3], составляет математическая модель контролируемого ТМП, в общем случае нестационарного. Она является общей и для предлагаемого изобретения. Модель описывается разностным стохастическим уравнением следующего вида:

где  ,
,  - переходные матрицы состояний вектора
- переходные матрицы состояний вектора  и формирующего шума
и формирующего шума  , k - номер (индекс) временного отсчета.
, k - номер (индекс) временного отсчета.
При этом вектор  на момент времени, обозначенный номером (индексом) k, представлен следующими компонентами:
на момент времени, обозначенный номером (индексом) k, представлен следующими компонентами:
где x(k) - оценка среднего значения контролируемого параметра;  - скорость изменения оценки среднего, представляющая собой производную x(k) по времени.
- скорость изменения оценки среднего, представляющая собой производную x(k) по времени.
Кроме того, сопровождающие формы переходных матриц  и
и  имеют вид:
имеют вид:

где  - есть интервал между двумя последовательными временными отсчетами измерений значений контролируемого параметра.
- есть интервал между двумя последовательными временными отсчетами измерений значений контролируемого параметра.
Алгоритм идентификации дисперсии случайной помехи в результатах измерений определяют в [3], как последовательное выполнение следующих расчетных операций:
1) осуществляют прогнозирование значения контролируемого параметра и дисперсий погрешностей оценок:

2) находят отклонения  прогнозируемой оценки от измеренного значения и оценки максимальной дисперсии
прогнозируемой оценки от измеренного значения и оценки максимальной дисперсии  случайных отклонений
случайных отклонений

 ,
,
где  - минимальная дисперсия случайной помехи,
- минимальная дисперсия случайной помехи,  ,
,  - весовые коэффициенты рекурсивного фильтра экспоненциального скользящего среднего;
- весовые коэффициенты рекурсивного фильтра экспоненциального скользящего среднего;
3) производят расчет текущей оценки медленно меняющегося систематического смещения  и его дисперсии
и его дисперсии  :
:


4) определяют текущую оценку дисперсии формирующего шума  :
:
5) осуществляют прогнозирование уточненной дисперсий погрешностей оценок:

6) вычисляют коэффициенты усиления:

7) производят расчет текущих оценок контролируемого параметра:
8) выполняют расчет оценки дисперсии случайной помехи, присутствующей в результатах измерений из-за не точного выбора частоты опроса контролируемого параметра:


где  ,
,  - весовые коэффициенты рекурсивного фильтра экспоненциального скользящего среднего.
- весовые коэффициенты рекурсивного фильтра экспоненциального скользящего среднего.
Эта часть алгоритма адаптивной нелинейной фильтрации (АНФ), включающая в себя вычислительные операции (1)-(15), является общей и для алгоритмического обеспечения выявления нарушителя по результатам обработки сигналов, формируемых извещателями существующих ТСО.
Но имеющиеся отличительные особенности потребовали внесения следующей коррекции в математическую модель, которая в [3] использовалась для коррекции частоты опроса ТМП.
Основу предлагаемого способа также составляет математическая модель функционирования извещателя, которая описывается системой стохастических дифференциальных уравнений первого порядка в форме уравнения Ланжевена [6-10]:
 , (16)
, (16)
где x(t) - вектор состояний извещателя, x∈R2;  - детерминированная функция состояний размерности (2×1);
- детерминированная функция состояний размерности (2×1);  - матрица весовых коэффициентов размерности (2×1); ω(t) - формирующий шум на входе извещателя, ω ∈ Ω; t - независимая переменная времени t∈T⊂R.
- матрица весовых коэффициентов размерности (2×1); ω(t) - формирующий шум на входе извещателя, ω ∈ Ω; t - независимая переменная времени t∈T⊂R.
Формирующий шум по своей физической природе является суперпозицией различных воздействующих факторов: случайных возмущений фоновой обстановки, случайных воздействий различного рода помех и возмущений от нарушителя в случае использования ТСО.
Контроль состояний извещателя осуществляется путем измерения наблюдаемого параметра выходов модели (16) в дискретные моменты времени и описывается линейной моделью измерений:
 , (17)
, (17)
где  - измеренное значение y∈Z;
- измеренное значение y∈Z;  - матрица измерений размерности (2×1);
- матрица измерений размерности (2×1);  - случайная помеха v∈R; tk - момент времени с индексов k∈N.
- случайная помеха v∈R; tk - момент времени с индексов k∈N.
Состояние извещателя, входящее в модель измерений (17), задается дискретной моделью состояний, определяемой из системы уравнений (16) в виде векторного разностного стохастического уравнения:
 , (18)
, (18)
где  и
и  - переходные матрицы состояний и возмущений; dw(tk) - случайная винеровская [11] последовательность, определяемая из решения дифференциального уравнения:
- переходные матрицы состояний и возмущений; dw(tk) - случайная винеровская [11] последовательность, определяемая из решения дифференциального уравнения:
 . (19)
. (19)
Уравнения (18) и (17) более компактно могут быть записаны в виде:
 , (20)
, (20)
 , (21)
, (21)
Переходные матрицы состояний и возмущений, входящие в уравнение состояний (20), определяют на основе следующих соотношений:
 (22)
(22)
где τ - шаг временной дискретизации, определяемый из выражения  .
.
Определение состояния извещателя сводится к нахождению наилучшей по критерию максимума функции правдоподобия плотности совместного распределения  , которая с учетом уравнения измерений (22) может быть представлена в виде:
, которая с учетом уравнения измерений (22) может быть представлена в виде:
 , (23)
, (23)
где  - есть марковская составляющая погрешности измерений, вызванная погрешностями формализации модели состояний (20). Данная составляющая погрешности измерений связана с априорной неопределенностью входного формирующего шума dw(tk).
- есть марковская составляющая погрешности измерений, вызванная погрешностями формализации модели состояний (20). Данная составляющая погрешности измерений связана с априорной неопределенностью входного формирующего шума dw(tk).
Отличительной особенностью рассматриваемого способа при трех неизвестных в уравнении совместной плотности вероятностей (23) является необходимость дополнения двух уравнений - уравнения состояний (20) и уравнения измерений (21) - уравнением для обеспечения условия корректности [3]. В качестве такого дополнительного уравнения используют уравнение, характеризующее условие адекватности модели состояний (20) по наблюдаемому параметру выхода (21), обеспечивающее выполнение условия ξk=0 на каждый момент поступления данных.
Используя формулу Байеса из выражения для условной плотности вероятностей:
 (24)
(24)
можно вывести выражение для условной оценки вектора состояний:
 (25)
(25)
Равенство (25) с учетом того, что условные плотности вероятностей  и
и  не зависят от марковской составляющей ξk, преобразуется к виду:
не зависят от марковской составляющей ξk, преобразуется к виду:
 (26)
(26)
Для условий гауссовской аппроксимации [7] моделей (20), (21) условная плотность вероятностей (26) имеет вид
 (27)
(27)
где С - константа;  - наилучшая по критерию максимума плотности распределения условной плотности вероятностей оценка вектора состояний xk;
- наилучшая по критерию максимума плотности распределения условной плотности вероятностей оценка вектора состояний xk;  - ковариационная матрица распределения вектора состояний
- ковариационная матрица распределения вектора состояний  ;
;  дисперсия случайной помехи
дисперсия случайной помехи  .
.
Оценка вектора состояний xk, соответствующая максимуму условной плотности вероятностей (27) и определяемая из условия равенства нулю функции правдоподобия
 (28)
(28)
приведенная к рекуррентному виду выражается соотношением
 (29)
(29)
или
 (30)
(30)
где  - матричный коэффициент усиления фильтра, с учетом которого определяется ковариационная матрица погрешностей оценок вектора состояний:
- матричный коэффициент усиления фильтра, с учетом которого определяется ковариационная матрица погрешностей оценок вектора состояний:
 , (31)
, (31)
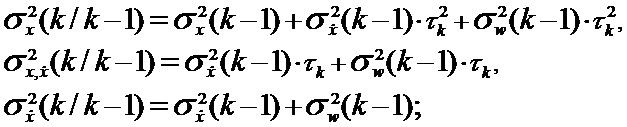
Априорные оценки в уравнениях (30) и (31) определяются соотношениями:
 ; (32)
; (32)
 , (33)
, (33)
где дисперсия  формирующего шума
формирующего шума  определяется по правилу:
определяется по правилу:
 , (34)
, (34)
где матричный коэффициент передачи  определяется по правилу:
определяется по правилу:
 . (35)
. (35)
Вектор x() на момент времени, обозначенный номером (индексом) k, представлен следующими компонентами:
 , (36)
, (36)
где x(k) - оценка среднего значения контролируемого параметра; - скорость изменения оценки среднего, представляющая собой производную x(k) по времени.
При этом алгоритм адаптивной нелинейной фильтрации с идентификацией дисперсии случайной помехи в измерениях и определением мощности формирующего шума для определения нарушителя при использовании ТСО определяют также, как и в способе [3]. Это подтверждается использованием той же порядковой нумерации формул, что и ранее. Но их принадлежность к данной заявке отмечена дополнительным обозначением в виде (*), определяющем отличие предлагаемого алгоритма вычислений от использованного в [3]:
1) осуществляют прогнозирование значения контролируемого параметра и дисперсий погрешностей оценок:
 (4*)
(4*)
 (5*)
(5*)
2) находят отклонения ε(k) прогнозируемой оценки от измеренного значения и оценки максимальной дисперсии случайных отклонений
 (6*)
(6*)
 , (7*)
, (7*)
где - минимальная дисперсия формирующего шума, α, β - весовые коэффициенты рекурсивного фильтра скользящего среднего;
3) производят расчет текущей оценки медленно меняющегося систематического смещения ξ(k) и его дисперсии :
(8*)
 (9*)
(9*)
4) определяют текущую оценку дисперсии (мощности) формирующего шума :
 (10*)
(10*)
5) осуществляют прогнозирование уточненной дисперсии погрешностей оценок:
 (11*)
(11*)
6) вычисляют коэффициенты усиления:
 (12*)
(12*)
7) производят расчет текущих оценок контролируемого параметра:
 (13*)
(13*)
По отношению к способу-прототипу [3] отличительная особенность предлагаемого изобретения заключается в конечной операции, когда расчет дисперсии случайной помехи, присутствующей в результатах измерений из-за не точного выбора частоты опроса контролируемого параметра:
где , - весовые коэффициенты рекурсивного фильтра скользящего среднего, исключают.
Вместо него:
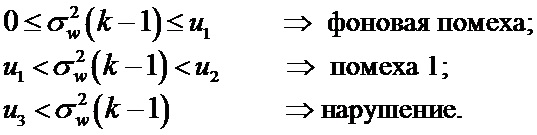
8) выполняют сравнение оценки мощности формирующего шума с априорно заданными пороговыми уровнями  ,
,  и формируют сигналы оповещения о воздействии помех и нарушителе:
и формируют сигналы оповещения о воздействии помех и нарушителе:
Таким образом, появляется возможность определить первый пункт формулы изобретения в предлагаемом способе оперативно-технической охраны рубежей объектов и границ.
1. Способ оперативно-технической охраны рубежей объектов и границ заключающийся в том, что устанавливают чувствительные элементы, составляющие основу построения технических средств охраны (ТСО), выбирают наиболее информативные признаки сигнала, формируемые чувствительными элементами (ЧЭ) извещателей, по которым идентифицируют факт преодоления нарушителем зоны охраны, фиксируют полученные значения сигналов с чувствительных элементов и выделяют из них признаки, свойственные нарушителю, сравнивают их значения с установленной величиной и по результатам сравнения определяют момент выдачи сигнала тревоги, отличающийся тем, что сформированные извещателем сигналы подвергают дополнительной обработке с использованием алгоритмов адаптивной нелинейной фильтрации (АНФ), в результате которой определяют косвенные оценки дисперсии формирующего шума , характеризующей мощность внешнего возмущения, которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент извещателя, приводящего к изменению его выходного сигнала, затем используют вычисленные косвенные оценки дисперсии формирующего шума , где k - индекс текущего временного отсчета, а (k-1) - индекс предшествующего временного отсчета измерений, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого на основе сравнения полученных оценок дисперсии формирующего шума с выбранными порогами u1, u2 и u3, где u1 - порог, ниже которого вычисленные значения оценок дисперсии формирующего шума, рассматривают как помеховый фон, не связанный с нарушением охраняемых рубежей объектов и границ, при этом нахождение сформированного сигнала, характеризующего изменение оценок дисперсии формирующего шума между порогами u1 и u2 рассматривают, как помеху, которая связана с повышенным влиянием внешних воздействий на ЧЭ извещателей, но не свидетельствует о нарушении зоны охраны, и только факт превышения сформированным сигналом оценок дисперсии формирующего шума порога u3 используют для формирования сигнала тревоги, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума.
2. Способ по п. 1, отличающийся тем, что основу формирования в предлагаемом способе сигнала тревоги составляют операции обработки сигналов извещателей и/или сформированной измерительной информации, которые заключаются в том, что восстановленные при приеме на фоне помех сигналы извещателя представляют цифровым кодом в дискретные моменты времени, выбираемые в соответствии с теоремой о дискретизации В.А. Котельникова, с формированием дискретной временной шкалы представления данных измерений или отсчетов их цифровых значений. От известных его аналогов он отличается тем, что состояния стохастического процесса описывают с точностью до формирующего шума стохастическим дифференциальным уравнением в форме уравнения Ланжевена:
 , (37)
, (37)
где x(t) - вектор состояний;  - детерминированная функция;
- детерминированная функция;  - матрица коэффициентов; ω(t) - формирующий шум,
- матрица коэффициентов; ω(t) - формирующий шум,
а значения полученных отсчетов, искаженных помехой, контролируют с использованием дискретной линейной модели измерений в виде:
 , (38)
, (38)
где  - результат измерения в момент времени tk;
- результат измерения в момент времени tk;  - матрица измерений;
- матрица измерений;  - случайная помеха в измерениях, которую представляют развернутой моделью в виде:
- случайная помеха в измерениях, которую представляют развернутой моделью в виде:
 , (39)
, (39)
затем определяют, исходя из поставленной задачи обработки, фазовую координату из полученного вектора измерений (39), полученные результаты оценивания вектора состояний используют для решения задач в следующей их последовательности: раскрытия неопределенности; выделения полезного сигнала из принятых зашумленных результатов измерений; получения дополнительных информационных признаков, в качестве которых используют оценки параметров и состояний, а также оценки дисперсии формирующего шума.
3. Способ по п. 1, заключающийся в том, что его основу составляет обработка сигналов, формируемых извещателями, с использованием адаптивной нелинейной фильтрации данных измерений, при которой модель состояний динамической системы представляют в виде разностного векторного уравнения
 (40)
(40)
включающего в себя вектор состояний x(k), воздействующего на динамическую систему быстроменяющегося формирующего шума dw(k-1) и их переходные матрицы состояний F(k/k-1), G(k/k-1) соответственно, где k - индекс наблюдаемого, а (k-1) предшествующего временного отсчета измерений, отличающийся тем, что модель измерений, адекватно описывающую процесс измерений, представляют как сумму:
 , (41)
, (41)
где ξ(k) - медленно меняющаяся марковская составляющая случайной помехи в измерениях, определяющая погрешности формализации модели состояний, и ее корреляционную взаимосвязь со случайной зашумляющей помехой v(t), при этом наличие медленно меняющейся марковской составляющей случайной помехи ξ(t) в измерениях y(k) используют для контроля адекватности таких моделей состояний по измерениям при изменениях условий проведения измерений.
4. Способ по п. 1, отличающийся тем, что для повышения сигнализационной надежности извещателей медленно меняющуюся марковскую составляющую случайной помехи в измерениях ξ(k) компенсируют на основе структурно-алгоритмических преобразований (САП).
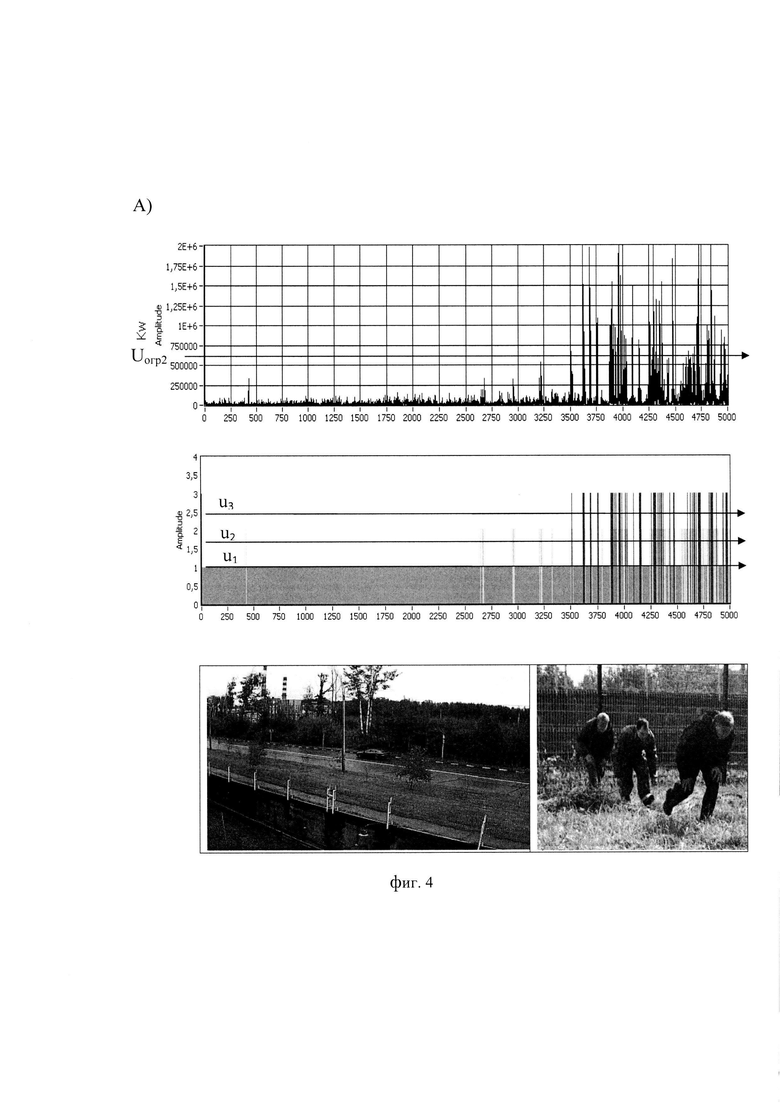
На иллюстрациях (фиг. 2, …, фиг. 7) приведены сигналы различных извещателей, а также соответствующие им по временным сечениям оценки дисперсий формирующего шума и идентификации произошедших событий на фоне помех при использовании различных порогов Uогр1,Uогр2, u1, u2 и u3. При этом порог, по отношению к которому осуществляют идентификацию событий в существующей практике, условно обозначен, как Uогр1 (фиг. 1, фиг. 2). Для повышения сигнализационной надежности извещателей, предполагающей одновременное повышение вероятности обнаружения нарушителя (Робн) и интервалов времени между ложными тревогами (ΔТлт), формируемыми ТСО, в предлагаемом изобретении используют дополнительные пороги ограничения, которые условно обозначены, как Uогр2 (фиг. 1 и фиг. 2). С выставленными порогами Uогр2 в предлагаемом изобретении сравнивают значения вычисленных оценок дисперсий случайной помехи, представленных на фиг. 1(Б), и формирующего шума (фиг.2, фиг.3, фиг. 4, фиг. 5, фиг. 6, фиг. 8). Кроме того, для идентификации событий, на основе которых принимают решение о формировании сигнала тревоги, в предлагаемом изобретении используют дополнительные пороги: u1, u2 и u3. Их может быть и больше трех по мере того, как будут накоплены на основе обучения новые знания по обеспечению более детальной идентификации наблюдаемого сигнала извещателей и результатов предлагаемой их обработки с использованием алгоритмов АНФ.
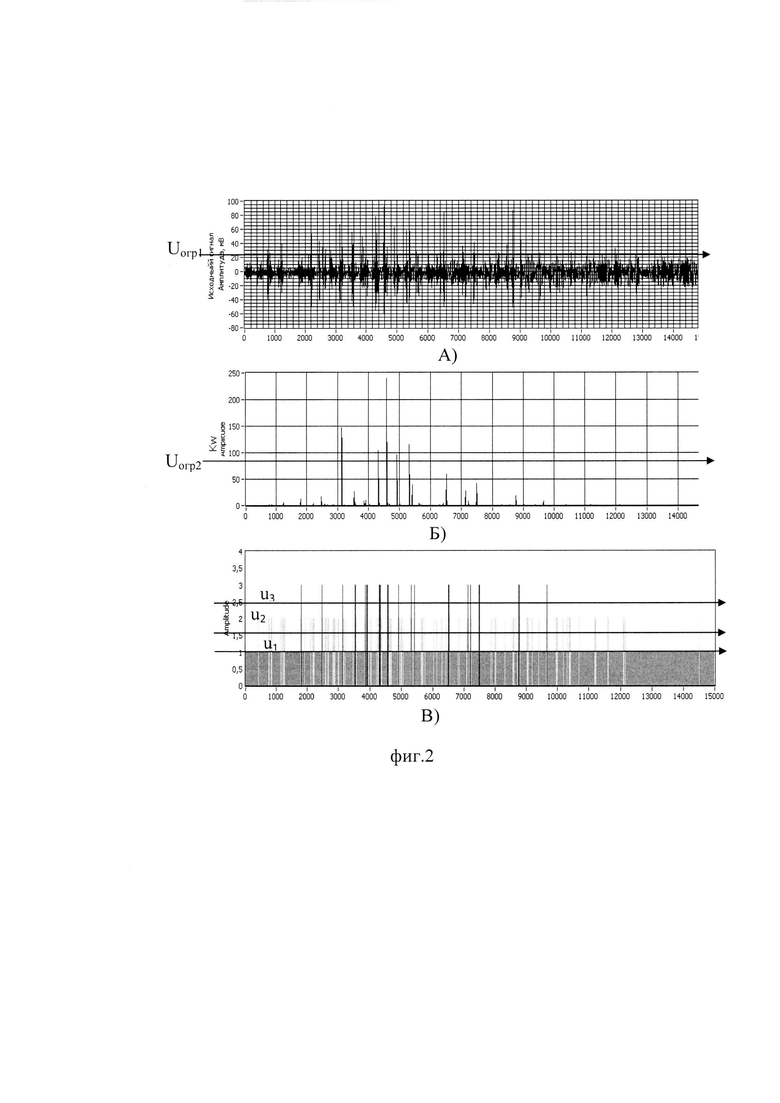
Кроме того, пороги u1, u2 и u3 используют и для выполнения дополнительной сервисной функции - обеспечения наглядного отображения результатов мониторинга различных ситуаций на основе цветной графики.
На фиг. 2 представлены иллюстрации для извещателей-геофонов. Из иллюстрации, приведенной на фиг. 2(А), следует, что сообщение тревоги выделяют из сигнала, формируемого извещателем-геофоном на основе сравнения с исходным пороговым напряжением Uогр1. Но при такой процедуре обнаружения нарушителя сигнализационная надежность существующих извещателей не отвечает предъявляемым требованиям (по вероятности обнаружения нарушителя (Робн) и интервалам времени (ΔТлт) между ложными тревогами). Использование для этой цели оценок дисперсии случайной помехи и дисперсии формирующего шума, получаемых при использовании предлагаемых алгоритмов АНФ, а также дополнительных значений пороговых напряжений Uогр2, которые должны быть выбраны на основе знаний, приобретенных на этапе обучения, и накопленных при этом экспериментальных данных, позволяет, как показывают проведенные исследования, существенно повысить сигнализационную надежность существующих извещателей. Об этом свидетельствуют и иллюстрации, приведенные на фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7 и фиг. 8.
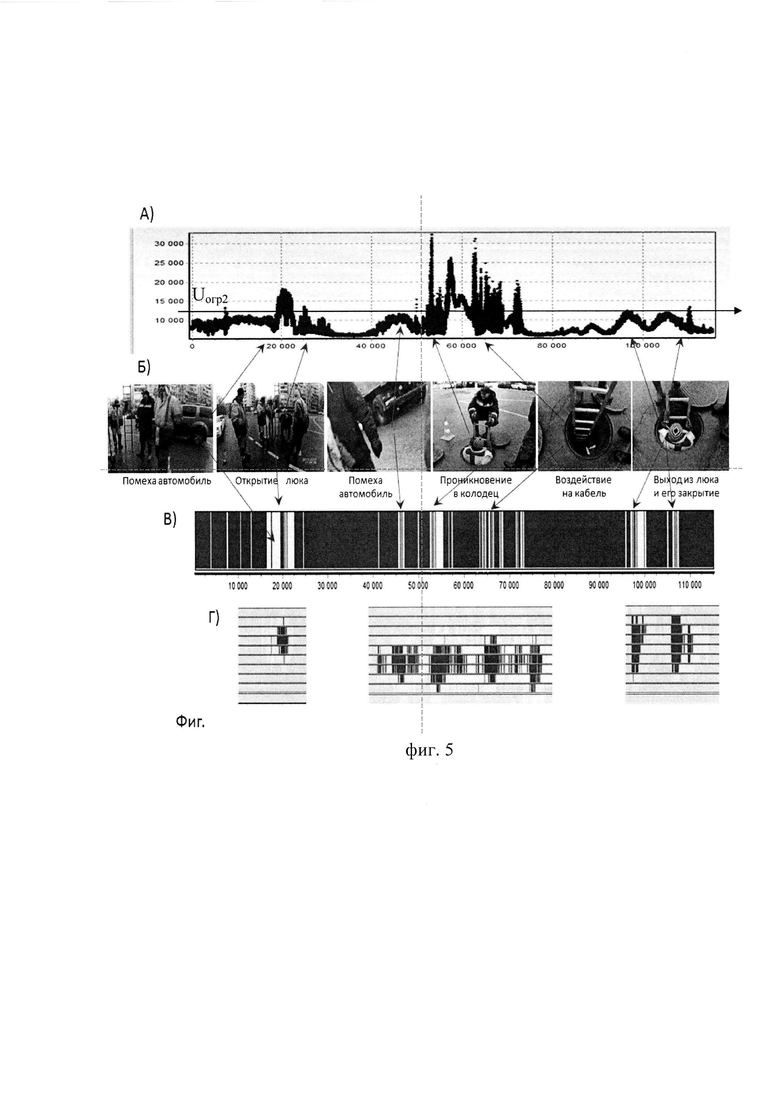
На фиг. 2(В), фиг. 3(Б), фиг. 4(Б) и фиг. 5(В) также представлены результаты идентификации данных обработки с использованием алгоритмов АНФ в виде цветоразностных сервисных отображений наблюдаемой ситуации. При этом зеленый цвет соответствуют случаю, когда исходный сигнал Х(kΔTi), где k = 1, 2, 3, … - индекс значения цифрового сигнала Х(k); ΔTi - интервал дискретизации аналогового сигнала, формируемого извещателем, меньше первого из пороговых значений u1: Х(k) ≤ u1. Это свидетельствует о наличии естественных фоновых помех, воздействующих на извещатель. Желтый цвет характеризует наличие маскирующих помех, усложняющих процесс надежного выделения сигналов, связанных с фактами нарушений (u1. < Х(k) ≤ u2), а красный идентифицируют как возможное нарушение границ охраняемых объектов (ОО) (u2. < Х(k) ≤ u3). При этом, если выполняется условие u3. < Х(k), то формируют сигнал тревоги (в некоторых случаях, где это предусмотрено в конкретном образце ТСО, сигнал предварительной тревоги). Для повышения уровня интеллектуализации представления полученных результатов также может быть использованы различные способы цветоразностного кодирования и графического отображения наблюдаемой ситуации, связанной с охраной рубежей объектов и границ. Один из таких вариантов представлен на фиг. 5(Г) для случая использования волоконно-оптических извещателей.
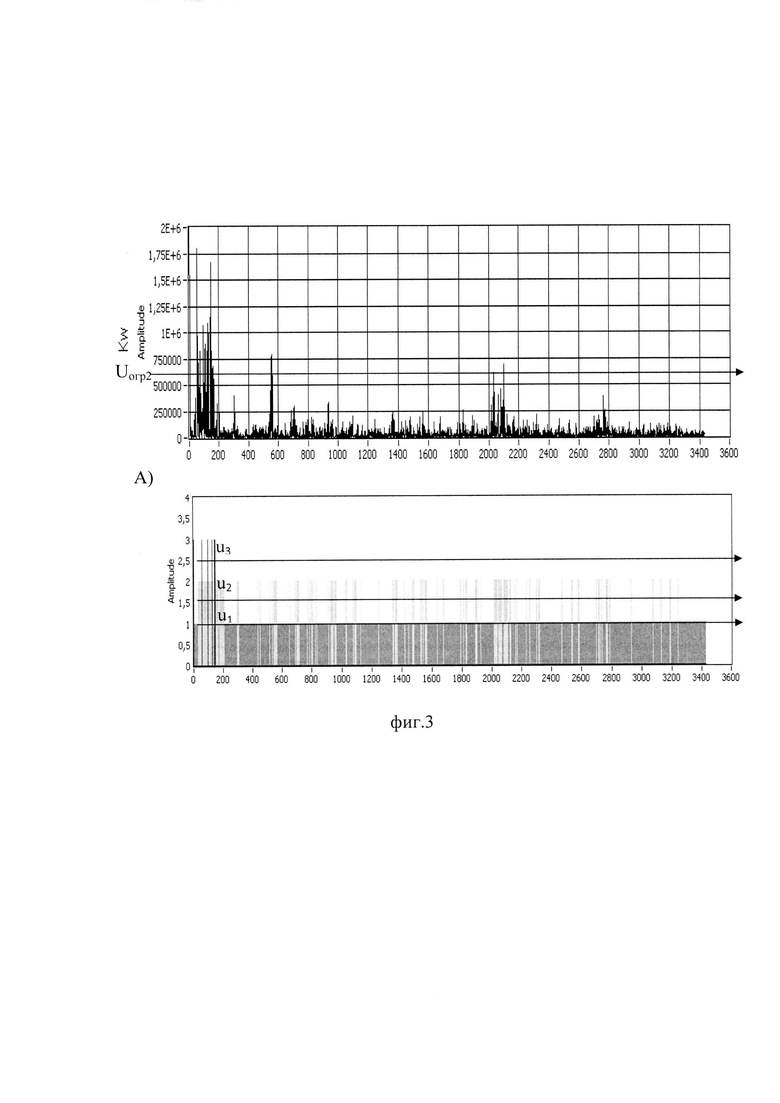
На фиг. 3, фиг. 4 и фиг. 5 представлены результаты обработки с использованием алгоритмов АНФ сигналов, формируемых волоконно-оптическими извещателями. При этом на фиг. 4 и фиг. 5 представлены: информация о происходивших событиях и привязанные к ним по времени сигналы, сформированными волоконно-оптическими извещателями. На фиг. 6 вертикальными линиями обозначены события, связанные с проникновением в колодцы для доступа кабельным линиям и оказываемым на них воздействиям.
На иллюстрации, приведенной на фиг. 6 (вверху), представлены без обработки сигналы от извещателя на основе оптоволокна, сопоставленные с происходящими событиями и искаженные помехами. При их сопоставлении с первоначальным пороговым значением Uпор1, может быть сделан вывод о неудовлетворительной сигнализационной надежности извещателя на основе оптоволокна. На иллюстрации, представленной на фиг.6 (внизу), приведены сигналы, сформированные волоконно-оптическим извещателем, но после их обработки с использованием алгоритмов адаптивной нелинейной фильтрации (АНФ). В результате этого была повышена сигнализационная надежность волоконно-оптического извещателя.
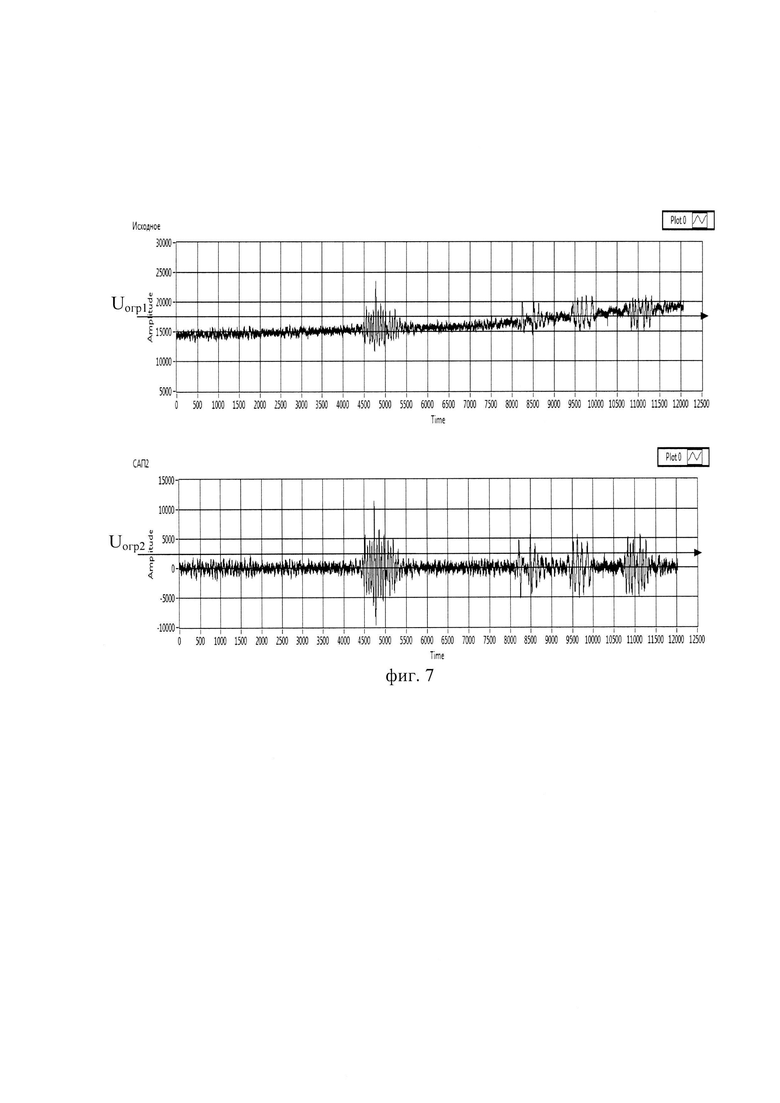
Иллюстрация, приведенная на фиг. 7, показывает, что один из основных недостатков существующих извещателей связан с отсутствием в описанном способе операции компенсации помех. На фиг. 7 представлен случай искажения исходного сигнала, сформированного извещателем, медленно меняющейся составляющей случайного процесса, в результате чего он становится нестационарным.
Таким образом, еще одна особенность предлагаемого способа заключается в том, что для повышения сигнализационной надежности извещателей перед применением предлагаемых алгоритмов АНФ используют дополнительные способы обработки сигналов извещателей, основное назначение которых заключено в компенсации помех, маскирующих факт совершения основного контролируемого события - нарушения границ охраняемых объектов.
Для этой цели используют алгоритмы структурно-алгоритмических преобразований (САП) ([5], заявка на изобретение №2017124869/12(042953)).
В [5] предложены три типа САП: САП-1, САП-2 и САП-3, использование которых позволяет повысить сигнализационную надежность извещателей. Основная идея САП-1 заключена в приведении сигналов разнородных извещателей к единому унифицированному цифровому виду, в том числе и с использованием существующих стандартных процедур таких, например, как преобразование Гильберта. Вторая процедура предлагаемых структурно-алгоритмических преобразований (САП-2) связана с компенсацией медленно меняющейся составляющей. Ее основу составляет: сглаживание исходного сигнала и суммирование с его же копией, но задержанной на определенное время (τзад), которое одновременно является и идентификационным признаком позволяющим уменьшить влияние на результат принятия решения различных деструктивных факторов, приводящих к маскирующим помехам и вызывающих ложное срабатывание ТСО. Третий тип САП-3, основу которого составляет использование при групповой обработке сигналов однотипных сейсмоаккустических извещателей матриц, подобных матрицам Адамара, предназначен для компенсации помех, источником которых является проезжающее или пролетающее транспортное средство. Четвертый вид САП-4 предназначен для обнаружения и исправления ошибок, появляющихся в сформированном извещателем сигнале при использовании нарушителем информационно-технических воздействий (ИТВ).
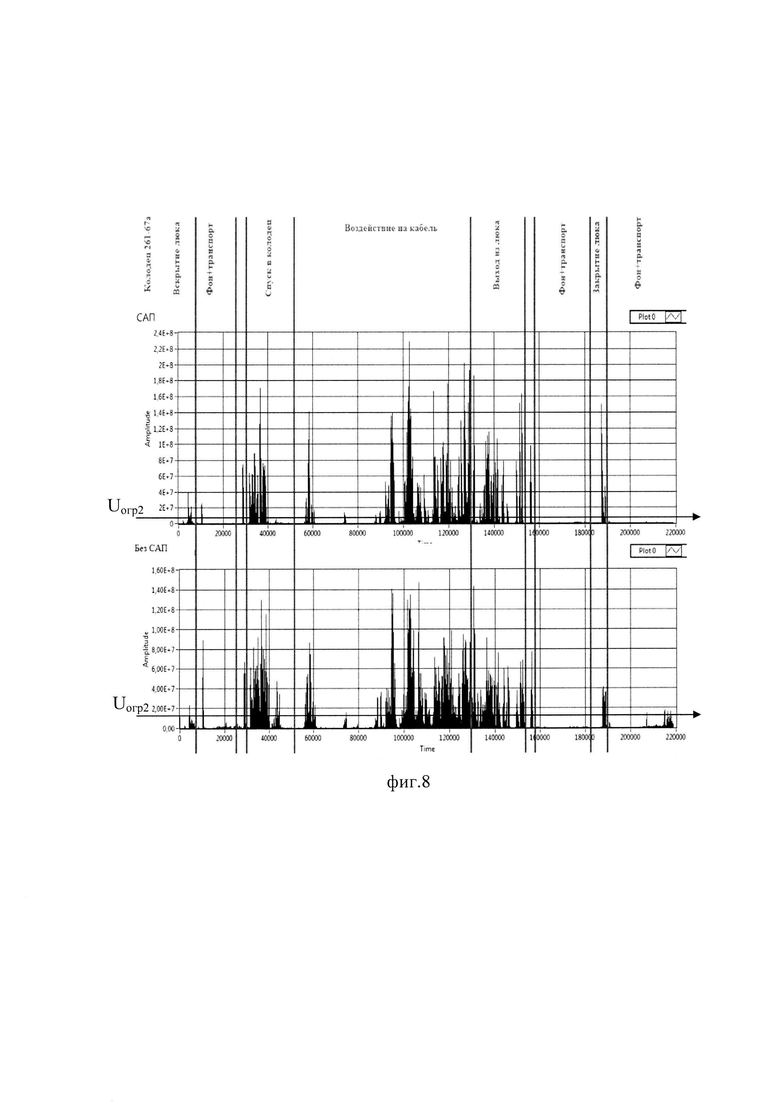
На фиг. 8 представлены результаты подавления помех и выделения на их фоне сигналов, которые используют для определения воздействий на охраняемые объекты при использовании двух различных технологий идентификации на основе алгоритмов АНФ: вверху для случая, когда перед применением алгоритмов АНФ используют алгоритмы САП, имеющих условное обозначение САП-2 [5]; внизу - после непосредственного использования алгоритмов АНФ.
Проведенные исследования показали, что в первом случае, когда перед применением алгоритмов АНФ были использованы алгоритмы САП-2, сигнализационная надежность существующих извещателей была повышена в несколько раз.
Таким образом, сущностные характеристики предлагаемого способа заключаются в возможности значительного повышения показателей сигнализационной надежности существующих извещателей и ТСО, в целом, за счет дополнительной обработки формируемых ими сигналов. При этом могут быть обеспечена высокая вероятность обнаружения нарушителя, например, Робн ≥ 0,95 при одновременном увеличении верменного интервала между ложными тревогами более 1000 час. Сущностные характеристики предлагаемого способа заключаются также в демонстрации на реальных примерах возможности борьбы с ложными тревогами на основе специальных методов обработки сигналов, что актуально для других технических приложений предлагаемого способа, например, для радио- и гидролокации.
Литература
1. «Способ охраны периметра объекта» (патент RU №2263968, МПИ7 G08B 13/02).
2. «Способ охраны периметра объекта» (патент RU №2473970 С1, МПИ7 G08B 13/02, опубликованный 27.01.2013г., бюл. №3.
3. «Способ передачи телеметрической информации, адаптированный к различным ситуациям, проявляющимся при проведении испытаний ракетно-космической техники, и система для его осуществления» (патент RU №2571584 С1, МПИ G08C19/28, опубл. 10.10.2015, бюл. №35:
4. «Способ передачи ТМИ, адаптированный к неравномерности потока данных телеизмерений, и система для его осуществления» (патент RU №2480838 С1, МПИ G08C19/28, опубл. 25.04.2013, бюл. №21.
5. «Способ оперативно-технической охраны рубежей объектов и границ» (заявка №2017124869/12(042953)).
6. Корн Г., Корн М. Справочник по математике для научных работников и инженеров. - М.: Мир, 1982. - 831 с.
7. Методы классической и современной теории автоматического управления: учебник в 5-ти тт.; 2-е изд., перераб. и доп. T. 2: Статистическая динамика и идентификация систем автоматического управления / Под ред. К.А. Пупкова, Н.Д. Егупова. - М.: Издательство МГТУ им. Н.Э. Баумана, 2004. - 784 с.
8. Кузнецов В.И. Статистическая идентификация. Адаптивная фильтрация. - Промышленные АСУ и контроллеры, 2014, № 7. - с. 20-27.
9. Кукушкин С.С., Кузнецов В.И. Анализ влияния зашумляющей помехи в результатах телеметрических измерений - М: «Измерительная техника», 2016. № 10. С. 21-23.
10. Справочник по теории автоматического управления/Под ред. А.А.Красовского. - М.: Наука, 1987. - 712 с.
11. Калман Р., Фалб П.. Арбиб М. Очерки по математической теории систем. - Пер. с англ. - М.: Мир, 1971. - 400 с.
12. Сейдж Э., Мелс Дж. Теория оценивания и ее применение в связи и управлении/ Пер. с англ. - М.: Связь, 1976. - 496 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ ОБЪЕКТОВ И ГРАНИЦ | 2021 |
|
RU2768227C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2017 |
|
RU2674809C9 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ЕГО СКОРОСТИ И ЦЕЛОСТНОСТИ | 2021 |
|
RU2794238C1 |
| СПОСОБ ПЕРВИЧНОЙ ОБРАБОТКИ ИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ АДАПТИВНОЙ НЕЛИНЕЙНОЙ ФИЛЬТРАЦИИ ДАННЫХ ИЗМЕРЕНИЙ | 2017 |
|
RU2672392C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ | 2020 |
|
RU2757306C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2586833C1 |
| ТЕЛЕМЕХАНИЧЕСКАЯ СИСТЕМА "ЛИЛАНА-ВИЯ" И СИГНАЛИЗАЦИОННОЕ ЗАГРАЖДЕНИЕ С ИЗВЕЩАТЕЛЕМ В.И. ЯЦКОВА | 2012 |
|
RU2491646C1 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К РАЗЛИЧНЫМ СИТУАЦИЯМ, ПОЯВЛЯЮЩИМСЯ ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ РАКЕТНО-КОСМИЧЕСКОЙ ТЕХНИКИ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571584C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609747C1 |
| ИЗВЕЩАТЕЛЬ В.И. ЯЦКОВА С ЁМКОСТНЫМ И ЛУЧЕВЫМ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2017 |
|
RU2697617C2 |

Изобретение относится к области телемеханики и технических средств охраны (ТСО) важных объектов и границ на основе извещателей, датчиков или сенсоров, использующих различные физические принципы обнаружения нарушителей. Технический результат заключается в повышении вероятности обнаружения нарушителя и в уменьшении вероятности ложных срабатываний и формирования сигналов ложной тревоги. Для этого сформированные извещателем сигналы подвергают дополнительной обработке с использованием алгоритмов адаптивной нелинейной фильтрации (АНФ), в результате которой определяют косвенные оценки дисперсии формирующего шума  , характеризующей мощность внешнего возмущения, которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент извещателя, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого в соответствии с представленной логикой на основе сравнения полученных оценок дисперсии формирующего шума с выбранными порогами, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума. 3 з.п. ф-лы, 8 ил.
, характеризующей мощность внешнего возмущения, которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент извещателя, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого в соответствии с представленной логикой на основе сравнения полученных оценок дисперсии формирующего шума с выбранными порогами, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума. 3 з.п. ф-лы, 8 ил.
1. Способ оперативно-технической охраны рубежей объектов и границ, заключающийся в том, что устанавливают чувствительные элементы, составляющие основу построения технических средств охраны (ТСО), выбирают наиболее информативные признаки сигнала, формируемые чувствительными элементами (ЧЭ) извещателей, по которым идентифицируют факт преодоления нарушителем зоны охраны, фиксируют полученные значения сигналов с чувствительных элементов и выделяют из них признаки, свойственные нарушителю, сравнивают их значения с установленной величиной и по результатам сравнения определяют момент выдачи сигнала тревоги, отличающийся тем, что сформированные извещателем сигналы подвергают дополнительной обработке с использованием алгоритмов адаптивной нелинейной фильтрации (АНФ), в результате которой определяют косвенные оценки дисперсии формирующего шума  , характеризующей мощность внешнего возмущения, которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент извещателя, приводящего к изменению его выходного сигнала, затем используют вычисленные косвенные оценки дисперсии формирующего шума , где
, характеризующей мощность внешнего возмущения, которая является косвенным информационным признаком импульсного воздействия нарушителя на чувствительный элемент извещателя, приводящего к изменению его выходного сигнала, затем используют вычисленные косвенные оценки дисперсии формирующего шума , где  - индекс текущего временного отсчета, а
- индекс текущего временного отсчета, а  - индекс предшествующего временного отсчета измерений, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого на основе сравнения полученных оценок дисперсии формирующего шума с выбранными порогами, u1, u2 и u3, где
- индекс предшествующего временного отсчета измерений, которые используют в качестве информационного признака при формировании сигнала оповещения о нарушении, формируемого на основе сравнения полученных оценок дисперсии формирующего шума с выбранными порогами, u1, u2 и u3, где  – порог, ниже которого вычисленные значения оценок дисперсии формирующего шума рассматривают как помеховый фон, не связанный с нарушением охраняемых рубежей объектов и границ, при этом нахождение сформированного сигнала, характеризующего изменение оценок дисперсии формирующего шума между порогами u1 и u2, рассматривают как помехи, которые связаны с повышенным влиянием внешних воздействий на чувствительный элемент извещателей, но не свидетельствуют о нарушении зоны охраны, и только факт превышения сформированным сигналом оценок дисперсии формирующего шума порога u3 используют для формирования сигнала тревоги, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума.
– порог, ниже которого вычисленные значения оценок дисперсии формирующего шума рассматривают как помеховый фон, не связанный с нарушением охраняемых рубежей объектов и границ, при этом нахождение сформированного сигнала, характеризующего изменение оценок дисперсии формирующего шума между порогами u1 и u2, рассматривают как помехи, которые связаны с повышенным влиянием внешних воздействий на чувствительный элемент извещателей, но не свидетельствуют о нарушении зоны охраны, и только факт превышения сформированным сигналом оценок дисперсии формирующего шума порога u3 используют для формирования сигнала тревоги, при этом для повышения вероятности обнаружения нарушителя по вычисленным оценкам дисперсии формирующего шума используют различные алгоритмы компенсации помех в сформированном сигнале, характеризующем изменение во времени оценок дисперсии формирующего шума.
2. Способ по п. 1, отличающийся тем, что основу формирования в предлагаемом способе сигнала тревоги составляют операции обработки сигналов извещателей и/или сформированной измерительной информации, которые заключаются в том, что восстановленные при приеме на фоне помех сигналы извещателя представляют цифровым кодом в дискретные моменты времени, выбираемые в соответствии с теоремой о дискретизации В.А.Котельникова, с формированием дискретной временной шкалы представления данных измерений или отсчетов их цифровых значений, отличающийся тем, что состояния стохастического процесса описывают с точностью до формирующего шума стохастическим дифференциальным уравнением в форме уравнения Ланжевена
 ,
,
где  - вектор состояний;
- вектор состояний;  - детерминированная функция;
- детерминированная функция;  - матрица коэффициентов;
- матрица коэффициентов;  - формирующий шум,
- формирующий шум,
а значения полученных отсчетов, искаженных помехой, контролируют с использованием дискретной линейной модели измерений в виде
 ,
,
где  - результат измерения в момент времени
- результат измерения в момент времени  ;
;  - матрица измерений;
- матрица измерений;  - случайная помеха в измерениях,
- случайная помеха в измерениях,
которую представляют развернутой моделью в виде
 ,
,
затем определяют, исходя из поставленной задачи обработки, фазовую координату из полученного вектора измерений, полученные результаты оценивания вектора состояний используют для решения задач в следующей их последовательности: раскрытия неопределенности измерений; выделения полезного сигнала из принятых зашумленных результатов измерений; получения дополнительных информационных признаков, в качестве которых используют оценки параметров и состояний, а также оценки дисперсии формирующего шума.
3. Способ по п. 1, заключающийся в том, что его основу составляет обработка сигналов, формируемых извещателями, с использованием адаптивной нелинейной фильтрации данных измерений, при которой модель состояний динамической системы представляют в виде разностного векторного уравнения
 включающего в себя вектор состояний
включающего в себя вектор состояний  , воздействующего на динамическую систему формирующего шума
, воздействующего на динамическую систему формирующего шума  и их переходные матрицы состояний
и их переходные матрицы состояний  ,
,  соответственно, где
соответственно, где  – индекс текущего, а предшествующего временного отсчета измерений, отличающийся тем, что модель измерений, адекватно описывающую процесс измерений, представляют как сумму
– индекс текущего, а предшествующего временного отсчета измерений, отличающийся тем, что модель измерений, адекватно описывающую процесс измерений, представляют как сумму
 ,
,
где  - медленно меняющаяся марковская составляющая случайной помехи в измерениях, определяющая погрешности формализации модели состояний и ее корреляционную взаимосвязь со случайной зашумляющей помехой v(t), при этом наличие медленно меняющейся марковской составляющей случайной помехи ξ(t) в измерениях
- медленно меняющаяся марковская составляющая случайной помехи в измерениях, определяющая погрешности формализации модели состояний и ее корреляционную взаимосвязь со случайной зашумляющей помехой v(t), при этом наличие медленно меняющейся марковской составляющей случайной помехи ξ(t) в измерениях  используют для контроля адекватности таких моделей состояний по измерениям при изменениях условий проведения измерений.
используют для контроля адекватности таких моделей состояний по измерениям при изменениях условий проведения измерений.
4. Способ по п. 1, отличающийся тем, что для повышения сигнализационной надежности извещателей медленно меняющуюся марковскую составляющую случайной помехи в измерениях компенсируют на основе структурно-алгоритмических преобразований.
| СПОСОБ ОХРАНЫ ПЕРИМЕТРА ОБЪЕКТА | 2012 |
|
RU2473970C1 |
| РАДИОСИСТЕМА ОХРАНЫ НА ШУМОПОДОБНЫХ СИГНАЛАХ | 1995 |
|
RU2103742C1 |
| СИСТЕМА И СПОСОБ ЗАЩИТЫ ОТ ВРЕДОНОСНОГО ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ, СВЯЗЫВАЮЩАЯСЯ С СЕРВЕРОМ | 2011 |
|
RU2571594C2 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К НЕРАВНОМЕРНОСТИ ПОТОКА ДАННЫХ ТЕЛЕИЗМЕРЕНИЙ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480838C2 |
| СПОСОБ ВИБРОМЕТРИЧЕСКОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263968C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ, ПРЕОДОЛЕВАЮЩЕГО СЕТЧАТОЕ ОГРАЖДЕНИЕ ОБЪЕКТА | 2015 |
|
RU2617666C2 |
| US 7348894 B2, 25.03.2008 | |||
| US 5748104 A1, 05.05.1998 | |||
| US 7180943 B1, 20.02.2007. | |||

