Предлагаемое изобретение относится к устройствам управления, в частности к электрическим устройствам управления пневмогидравлическим приводом газового крана.
Известно устройство для управления исполнительным механизмом и сигнализации его состояния (авт. св. СССР N 1693652. кл. H 01 H 47/00, БИ N 43, 1991), содержащее первый и второй блоки управления, первый и второй приводы запорного органа, к первому и второму выводам каждого из которых подключены первый и второй выходы соответственно первого и второго блоков управления, переключающие контакты первого и второго конечных выключателей, первый вывод каждого из которых соединен с третьим выходом соответствующего блока управления, к первому и второму входам каждого из которых подключены соответственно второй и третий выводы переключающего контакта соответствующего конечного выключателя, первый и второй блоки сигнализации, входы каждого из которых соединены с четвертым и пятым выходами соответствующего блока управления, а первый и второй блоки управления выполнены одинаково и каждый из них содержит первый и второй переключатели рода управления, элемент включения, к первому и второму входам которого подключены второй и третий выводы второго переключателя рода управления, переключатель отключения самоблокировки, реле включения, первый диод, включенный параллельно обмотке реле включения в обратном направлении, источник переменного напряжения, первый и второй выводы которого подключены соответственно к первому и третьему выходам блока, управления, второй вход которого через первый нормально разомкнутый контакт реле включения соединен со вторым выходом блока управления, выпрямительный мост, к выводам переменного напряжения которого подключены первый полюс источника переменного напряжения и первый вход блока управления, реле контроля, второй диод, включенный параллельно обмотке реле контроля в обратном направлении, первый резистор, первый вывод которого соединен с минусом выпрямительного моста, второй резистор, первый вывод которого подключен ко второму выводу первого резистора, второй вывод второго резистора соединен со вторым выводом обмотки реле контроля, с первыми выводами первого переключателя рода управления и первого нормально разомкнутого контакта реле контроля, третий вывод первого переключателя рода управления подключен к первым выводам второго переключателя рода управления и переключателя отключения самоблокировки, второй вывод которого соединен через последовательно соединенные второй нормально разомкнутый контакт реле включения и второй нормально замкнутый контакт реле контроля со вторым выходом элемента включения и с первым выводом обмотки реле включения, второй вывод которого подключен к первому выводу обмотки реле контроля, к плюсу выпрямительного моста и к четвертому выходу блока управления, пятые выходы которого соединены со вторыми выводами первого и второго переключателей рода управления, с первым выходом элемента включения, с третьим выводом переключателя отключения самоблокировки и со вторым выводом первого нормально разомкнутого контакта реле контроля.
Данное устройство для управления исполнительным механизмом и сигнализации его состояния, так же как и заявляемое, содержит два блока сигнализации, выполненные на светодиодах, два привода запорного органа, контакты двух конечных выключателей и два блока управления (вторые блоки на чертеже не показаны), при этом каждый блок управления включает в свой состав реле включения (управления), его нормально разомкнутый контакт, реле контроля и элемент включения (кнопку подачи команд, переключатель выбора адреса и контакт внешней цепи автоматического управления). Однако отсутствие в устройстве элемента разрешения и отсутствие контроля рабочего положения смежного блока управления может привести к включению одновременно обоих блоков управления и к выходу из строя запорного органа, а отсутствие в блоке управления первого и второго датчиков контроля тока, элементов задержки И, ИЛИ и И-НЕ не позволяет проконтролировать состояние обмотки привода запорного органа и цепи включения перед подачей сигнала на включение привода и своевременно принять меры по восстановлению работоспособности привода запорного органа, что в совокупности резко снижает надежность работы устройства.
Известно устройство для управления приводом запорного органа (авт. св. СССР N 1140184, кл. H 01 H 47/00, БИ N 6, 1985), содержащее первый блок управления, нормально замкнутый контакт первого конечного выключателя, первый привод запорного органа, первый вывод которого соединен с первым выходом первого блока управления, второй выход которого подключен через нормально замкнутый контакт первого конечного выключателя ко второму выводу первого привода запорного органа, второй блок управления, нормально замкнутый контакт второго конечного выключателя, второй привод запорного органа, первый вывод которого соединен с первым выходом второго блока управления, второй выход которого подключен через нормально замкнутый контакт второго конечного выключателя ко второму выводу второго привода - запорного органа, при этом оба блока управления выполнены одинаково и каждый из них состоит из элемента включения (кнопки управления), реле включения (движения), реле контроля с высокоомной и с низкоомной обмотками, положительный полюс источника питания подключен через параллельно соединенные элемент включения и последовательно соединенные первый нормально разомкнутый контакт реле включения и нормально разомкнутый контакт реле контроля к первому выводу реле включения, а через последовательно соединенные высокоомную и низкоомную обмотки реле контроля - ко второму выходу блока управления, первый выход которого соединен со вторым выводом реле включения и с отрицательным полюсом источника питания, второй нормально разомкнутый контакт реле включения подключен параллельно высоомной обмотке реле контроля.
Данное устройство для управления приводом запорного органа, так же как и заявляемое, содержит два привода запорного органа, нормально замкнутые контакты первого и второго конечных выключателей и два блока управления (вторые блоки на чертеже не показаны), при этом каждый блок управления включает в свой состав реле включения (движения), его нормально разомкнутый контакт и элемент включения (кнопку управления). Однако отсутствие в устройстве элемента разрешения и отсутствие контроля рабочего положения смежного блока управления могут привести к включению одновременно обоих блоков управления и к выходу из строя запорного органа, отсутствие шины сигнализации не позволяет контролировать процесс переключения запорного органа, а выполнение в блоке управления контроля состояния привода и цепи его включения на двухобмоточном реле с высокоомной и низкоомными обмотками, с одной стороны, снижает ресурс устройства, а с другой - создает возможность потери контроля из-за отказов контактов этого реле, что в совокупности резко снижает надежность работы устройства.
Наиболее близким по технической сущности является устройство для управления приводом запорного органа (авт. св. СССР N 1417071. кл. H 01 H 47/00, БИ N 30, 1988), содержащее первый блок управления, нормально замкнутый контакт первого конечного выключателя, первый привод запорного органа, первый вывод которого соединен с первым выходом первого блока управления, второй выход которого подключен через нормально замкнутый контакт первого конечного выключателя во второму выводу первого привода запорного органа второй блок управления, нормально замкнутый контакт второго конечного выключателя, второй привод запорного органа, первый вывод которого соединен с первым выходом второго блока управления, второй выход которого подключен через нормально замкнутый контакт второго конечного выключателя ко второму выводу второго привода запорного органа, к входу первого блока управления подключен третий выход второго блока управления, вход которого соединен с третьим выходом первого блока управления, при этом оба блока управления выполнены одинаково и каждый из них состоит из элемента включения (кнопки управления), реле включения (движения), реле контроля с высокоомной и с низкоомной обмотками, конденсатора, положительный полюс источника питания подключен через параллельно соединенные элемент включения и последовательно соединенные первый нормально разомкнутый контакт реле включения и нормально разомкнутый контакт реле контроля к первому выводу реле включения, через второй нормально разомкнутый контакт реле включения - ко второму выводу конденсатора и к точке соединения высокоомной и низкоомной обмоток реле контроля, вход блока управления соединен с первым выводом конденсатора и через последовательно соединенные высокоомную и низкоомную обмотки реле контроля со вторым выходом блока управления, первый выход которого соединен со вторым выводом реле включения и с отрицательным полюсом источника питания, первый и второй выводы третьего контакта реле включения подключены к положительному полюсу источника питания, а третий вывод третьего контакта реле включения соединен с третьим выходом блока управления.
Данное устройство для управления приводом запорного органа, так же как и известное, содержит первый и второй приводы запорного органа, нормально замкнутые контакты первого и второго конечных выключателей и первый и второй блоки управления (второй блок на чертеже не показан), при этом каждый блок управления включает в свой состав реле включения (движения), его нормально разомкнутый контакт и элемент включения (кнопку управления). Однако отсутствие в устройстве элемента разрешения и отсутствие контроля рабочего положения смежного блока управления могут привести к включению одновременно обоих блоков управления и к выходу из строя запорного органа, отсутствие шины сигнализации не позволяет контролировать процесс переключения запорного органа, а выполнение в блоке управления контроля состояния привода и цепи его включения на двухобмоточном реле с высокоомной и низкоомными обмотками, с одной стороны, снижает ресурс устройства, а с другой - создает возможность потери контроля из-за отказов контактов этого реле, что в совокупности резко снижает надежность работы устройства.
В основу изобретения поставлена задача усовершенствования устройства для управления приводом запорного органа путем повышения надежности его функционирования за счет введения шины сигнализации, элемента разрешения, контроля рабочего положения смежного блока управления и выполнения контроля состояния привода и цепи его включения на оптронных датчиках тока и логических элементах.
Поставленная задача решается тем, что в известное устройство для управления приводом запорного органа, содержащее первый блок управления, нормально замкнутый контакт первого конечного выключателя, первый привод запорного органа, первый вывод которого соединен с первым выходом первого блока управления, второй выход которого подключен ко второму выводу первого привода запорного органа через нормально замкнутый контакт первого конечного выключателя, второй блок управления, нормально замкнутый контакт второго конечного выключателя, второй привод запорного органа, первый вывод которого соединен с первым выходом второго блока управления, второй выход которого подключен ко второму выводу второго привода запорного органа через нормально замкнутый контакт второго конечного выключателя, четвертый выход первого блока управления подключен ко второму входу второго блока управления, четвертый выход которого соединен со вторым входом первого блока управления, первый и второй блоки управления выполнены одинаково и каждый из них содержит первый и второй источники питания, элемент включения, реле включения, второй вывод которого соединен с первым полюсом второго источника питания, нормально разомкнутый контакт реле включения, первый вывод которого соединен со вторым полюсом первого источника питания, первый полюс которого подключен к первому выходу блока управления, введены первая и вторая шины сигнализации и элемент разрешения, выход которого подключен к первым входам первого и второго блоков управления, третьи выходы которых подключены соответственно к первой и второй шине сигнализации, а в каждый из блоков управления введены первый и второй датчики тока, резистор, стабилитрон, элемент задержки, элементы И, ИЛИ, И-НЕ и усилитель, выход которого подключен к первому выводу реле включения и к входу элемента включения, выход которого подключен ко второму входу элемента И-НЕ, второй полюс первого источника питания соединен с первым входом подключения первого датчика тока, второй вход подключения которого соединен с первым входом подключения второго датчика тока, со вторым выводом нормально разомкнутого контакта реле включения, с первым выводом резистора и с катодом стабилитрона, анод которого подключен ко второму выводу резистора, ко второму выходу блока управления и ко второму входу подключения второго датчика тока, выход которого соединен с первым входом элемента И и с входом элемента задержки, выход которого соединен со вторым входом элемента И, выход которого подключен к первому входу элемента ИЛИ, второй вход которого соединен с выходом первого датчика тока, а выход - с первым входом элемента И-НЕ, выход которого подключен к входу усилителя и к четвертому выходу блока управления, третий и четвертый входы элемента И-НЕ соединены соответственно с первым и со вторым входами блока управления, выходы элемента задержки, первого и второго датчиков тока соединены с третьими выходами блока управления.
Введение в каждый из блоков управления элемента И-НЕ и усилителя с указанными связями и подключение выхода элемента И-НЕ одного блока управления к своему четвертому выходу и далее через второй вход другого блока управления к четвертому входу его элемента И-НЕ позволяют исключить возможность одновременного включения обоих блоков управления и обоих приводов запорного органа, т.е. попытки перевода запорного органа в противоположных направлениях.
Введение элемента разрешения позволяет в отличие от прототипа четко выполнить реверс запорного органа, т.е. после начала, но до окончания перевода запорного органа прекратить перевод, а потом вернуть запорный орган в прежнее положение.
Введение первого и второго датчиков тока, резистора, стабилитрона и элемента ИЛИ позволяет контролировать состояние привода запорного органа и цепи его включения как при выключенном, так и при включенном положении привода, причем с более высокой степенью надежности, при этом уменьшены габариты узла контроля и потребление электроэнергии.
Введение элементов задержки и И позволяет исключить возможность выхода из строя привода запорного органа в случае, если по какой-либо причине запорный орган не может дойти до конечного положения, т. к. отключает привод через установленное время.
Введение шины сигнализации позволяет визуально контролировать процесс перевода запорного органа из одного положения в другое по сигналам в выбранных точках схемы.
На фиг. 1 приведена функциональная схема предлагаемого устройства для управления приводом запорного органа;
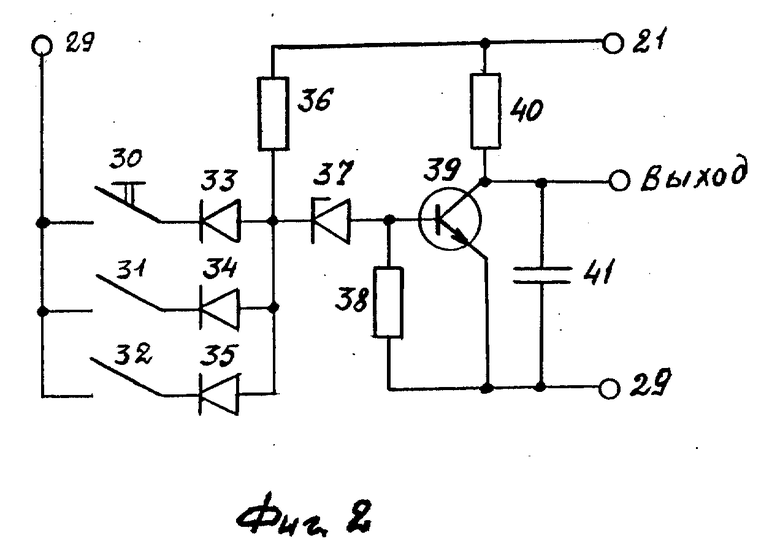
на фиг. 2 - пример выполнения элемента разрешения;
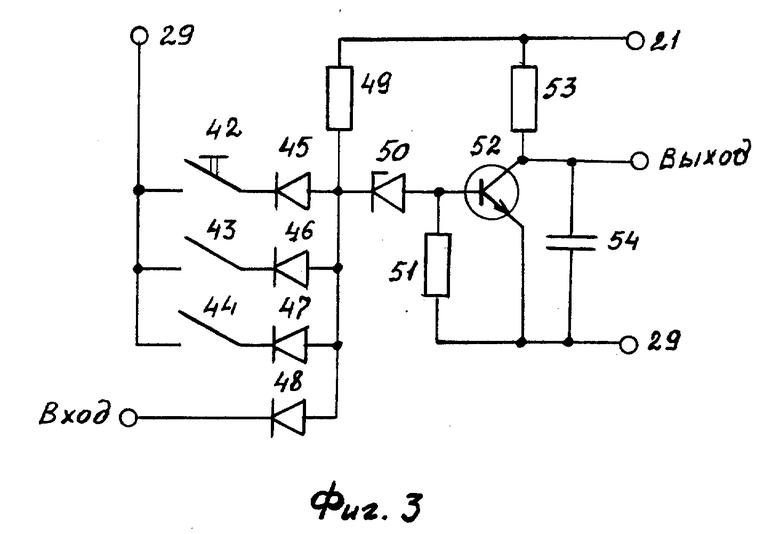
на фиг. 3 - пример выполнения элемента включения;
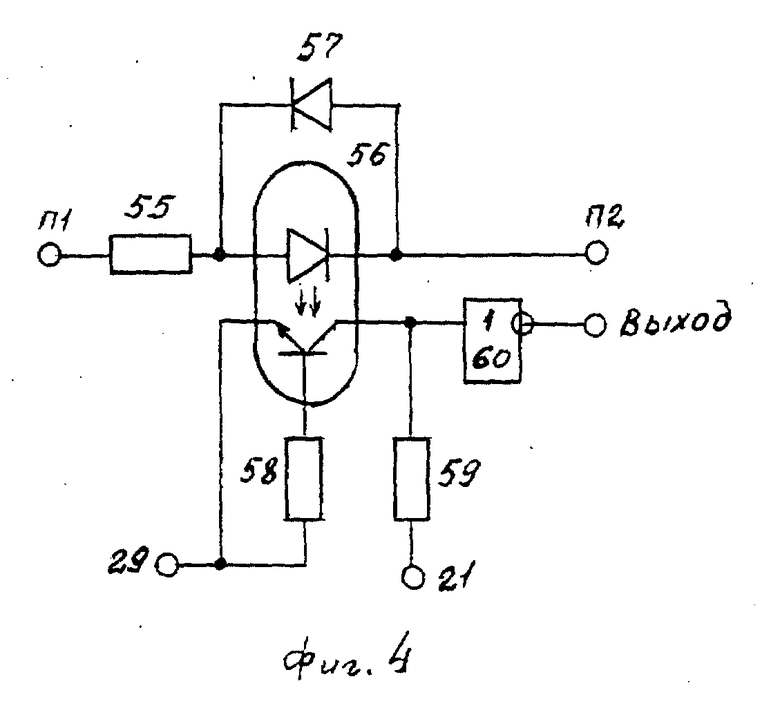
на фиг. 4 - схема датчика тока;
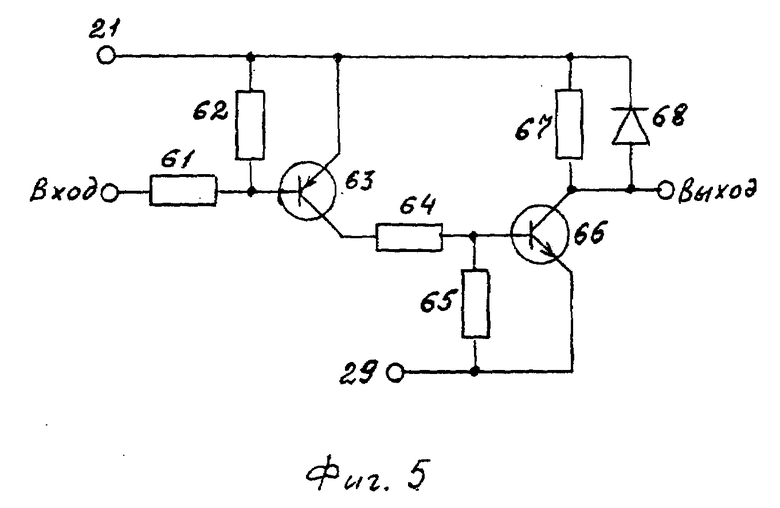
на фиг. 5 - пример выполнения усилителя;
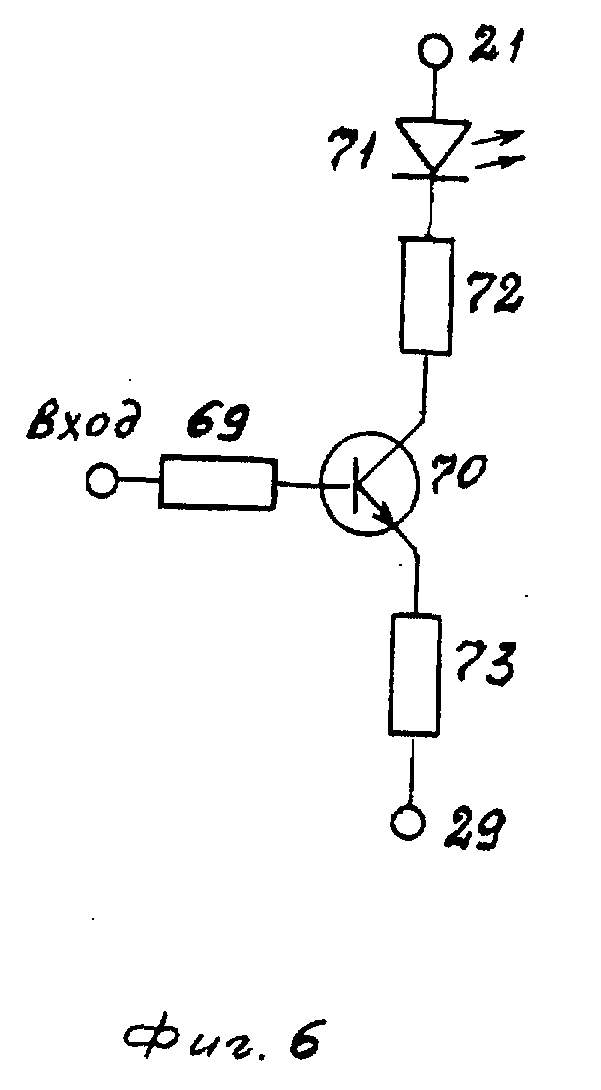
на фиг. 6 - пример выполнения схемы сигнализации;
Устройство для управления приводом запорного органа содержит первый блок управления 1, нормально замкнутый контакт первого конечного выключателя 2, первый привод запорного органа 3, первый вывод которого подключен к первому выходу блока управления 1, второй выход которого соединен со вторым выводом привода запорного органа 3 через нормально замкнутый контакт конечного выключателя 2, первые шины сигнализации 4, к которым подключены третьи выходы блока управления 1, элемент разрешения 5, второй блок управления 6, первый вход которого соединен с первым входом первого блока управления 1 и с выходом элемента разрешения 5, нормально замкнутый контакт второго конечного выключателя 7. второй привод запорного органа 8, первый вывод которого подключен к первому выходу блока управления 6, второй выход которого соединен со вторым выводом привода запорного органа 8 через нормально замкнутый контакт конечного выключателя 7, вторые шины сигнализации 9, к которым подключены третьи выходы блока управления 6, четвертый выход которого соединен со вторым входом блока управления 1, четвертый выход которого подключен ко второму входу блока управления 6.
Блоки управления 1 и 6 (фиг. 1) выполнены одинаково и каждый из них содержит первый 10 и второй 11 полюсы первого источника питания, первый датчик тока 12, второй датчик тока 13, элемент задержки 14, элемент И 15, ко второму входу которого подключен выход элемента задержки 14, вход которого соединен с выходом второго датчика тока 13 и с первым входом элемента И 15, элемент ИЛИ 16, к входам которого подключены выход первого датчика тока 12 и выход элемента И 15, элемент включения 17, элемент И-НЕ 18 к первому входу которого подключен выход элемента ИЛИ 16, а ко второму - выход элемента включения 17, усилитель 19, вход которого соединен с выходом элемента И-НЕ 18 и с четвертым выходом блока управления 1 (6), реле включения 20, один вывод которого соединен с выходом усилителя 19 и с входом элемента включения 17, а второй - с первым полюсом 21 второго источника питания, нормально разомкнутый контакт 22 реле включения 20, первый вывод которого подключен к первому входу подключения первого датчика тока 12 и к полюсу 11 первого источника питания, стабилитрон 23, резистор 24, один вывод которого соединен со вторым выводом нормально разомкнутого контакта 22 реле включения 20. с катодом стабилитрона 23, со вторым входом подключения первого датчика тока 12 и с первым входом подключения второго датчика тока 13, второй вход подключения которого соединен с анодом стабилитрона 23, со вторым выводом резистора 24 и со вторым выходом блока управления 1 (6), первый выход которого соединен с полюсом 10 первого источника питания, выходы первого 12 и второго 13 датчиков тока и выход элемента задержки 14 подключены к третьим выходам блока управления 1 (6), первый вход которого соединен с третьим входом элемента И-НЕ 18, к четвертому входу которого подключен второй вход блока управления 1 (6).
Элемент задержки 14 осуществляет задержку переднего фронта сигнала с выхода датчика тока 13 на время, превосходящее длительность процесса перевода запорного органа, например на 10%. Это время в зависимости от типа запорного органа может составлять 2 - 3 мин, при этом задержка заднего фронта сигнала с выхода датчика тока 13 минимальна и составляет единицы миллисекунд. Элемент задержки 14 выполняется по любой из известных схем.
Привод запорного органа 3 предназначен для перевода запорного органа в открытое положение. Привод запорного органа 8 предназначен для перевода запорного органа в закрытое положение. Приводы запорного органа 3 и 8 (фиг. 1) выполнены одинаково и каждый из них содержит соленоид 25, диод 26, анод которого подключен к первому выводу привода запорного органа 3 (8) и к первому выводу соленоида 25, конденсатор 27, резистор 28, первый вывод которого соединен с катодом диода 26, со вторым выводом привода запорного органа 3 (8) и с первым выводом конденсатора 27, второй вывод которого подключен ко второму выводу резистора 28 и ко второму выводу соленоида 25. Величина сопротивления соленоида 25 и величина сопротивления резистора 28 составляет ≈800 Ом.
Элемент разрешения 5 (фиг. 2) предназначен для подачи сигнала, разрешающего перевод запорного органа, и содержит второй полюс 29 второго источника питания, кнопку местного перевода 30, контакт перевода в аварийных ситуациях 31, контакт автоматического перевода 32, первые выводы кнопки 30 и контактов 31 и 32 соединены между собой и с полюсом 29 второго источника питания, диоды 33, 34 и 35, катоды которых подключены ко вторым выводам соответственно кнопки 30 и контактов 31 и 32, резистор 36, стабилитрон 37, катод которого соединен со вторым выводом резистора 36 и с анодами диодов 33, 34 и 35, резистор 38, транзистор 39, база которого подключена к аноду стабилитрона 37 и к первому выводу резистора 38, резистор 40, первый вывод которого соединен с первым выводом резистора 36 и с полюсом 21 второго источника питания, конденсатор 41, второй вывод которого подключен ко второму выводу резистора 38, к полюсу 29 второго источника питания и к эмиттеру транзистора 39, коллектор которого соединен с первым выводом конденсатора 41, со вторым выводом резистора 40 и с выходом элемента разрешения 5.
Элемент включения 17 (фиг. 3) предназначен для подачи сигнала на перевод запорного органа в противоположное положение путем включения соответствующего блока управления 1 или 6 и содержит второй полюс 29 второго источника питания, кнопку местного перевода 42, контакт перевода в аварийных ситуациях 43, контакт автоматического перевода 44, первые выводы кнопки 42 и контактов 43 и 44 соединены между собой и с полюсом 29 второго источника питания, диоды 45, 46, и 47, катоды которых подключены ко вторым выводам соответственно кнопки 42 и контактов 43 и 44, диод 48, катод которого подключен к входу элемента включения 17, резистор 49, стабилитрон 50, катод которого соединен со вторым выводом резистора 49 и с анодами диодов 45, 46, 47 и 48, резистор 51, транзистор 52, база которого подключена к аноду стабилитрона 50 и к первому выводу резистора 51, резистор 53, первый вывод которого соединен с первым выводом резистора 49 и с полюсом 21 второго источника питания, конденсатор 54, второй вывод которого подключен ко второму выводу резистора 51, к полюсу 29 второго источника питания и к эмиттеру транзистора 52, коллектор которого соединен с первым выводом конденсатора 54, со вторым выводом резистора 53 и с выходом элемента включения 17.
Датчик тока 12 предназначен для контроля целостности обмотки соленоида 25 привода запорного органа 3 или 8 и цепей его подключения к первому источнику питания при выключенном реле включения 20. Датчик тока 13 предназначен для контроля срабатывания реле включения 20. Датчики тока 12 и 13 (фиг. 4) выполнены по одной схеме и каждый из них содержит резистор 55, первый вывод которого является первым выводом подключения датчика тока 12 (13), оптрон 56, диод 57, катод которого соединен со вторым выводом резистора 55 и с выводом анода светодиода оптрона 56, вывод катода которого подключен к аноду диода 57 и является вторым выводом подключения датчика тока 12 (13), резистор 58, второй вывод которого соединен с полюсом 29 второго источника питания и с выводом эмиттера, транзистора оптрона 56, вывод базы которого подключен к первому выводу резистора 58, резистор 59, элемент НЕ 60, вход которого соединен с выводом коллектора транзистора оптрона 56 и с первым выводом резистора 59, второй вывод которого подключен к полюсу 21 второго источника питания, выход элемента НЕ 60 является выходом датчика тока 12 (13).
Сопротивление резистора 55 в датчике тока 12 составляет 51 кОм, сопротивление резистора 55 в датчике тока 13 составляет 510 Ом, остальные элементы датчиков 12 и 13 одинаковы.
Усилитель 19 (фиг. 5) предназначен для включения реле 20 от сигнала с выхода элемента И-НЕ 18 и содержит резистор 61, первый вывод которого является входом усилителя 19, резистор 62, транзистор 63, база которого подключена ко вторым выводам резисторов 61 и 62, резистор 64, первый вывод которого подключен к коллектору транзистора 63, резистор 65, транзистор 66, база которого соединена со вторым выводом резистора 64 и с первым выводом резистора 65, резистор 67, диод 68, катод которого подключен к первым выводам резисторов 67 и 62, к эмиттеру транзистора 63 и к полюсу 21 второго источника питания, полюс 29 которого соединен со вторым выводом резистора 65 и с эмиттером транзистора 66, коллектор которого является выходом усилителя 19 и подключен ко второму выходу резистора 67 и к аноду диода 68.
Схема сигнализации может быть выполнена так, как необходимо в каждом конкретном случае. На фиг. 6 приведен пример выполнения одного элемента сигнализации, предназначенного для сигнализации состояния одной точки из выведенных на третьи выходы блока управления 1 или 6, данная схема сигнализации содержит резистор 69, первый вывод которого является входом схемы сигнализации, транзистор 70, база которого подключена ко второму выводу резистора 69, светодиод 71, анод которого соединен с полюсом 21 второго источника питания, резистор 72, первый вывод которого подключен к катоду светодиода 71, а второй - к коллектору транзистора 70, резистор 73, первый вывод которого соединен с эмиттером транзистора 70, а второй - с полюсом 29 второго источника питания.
Первый источник тока с полюсами 10 и 11 предназначен для питания схемы привода запорного органа, второй источник питания с полюсами 21 и 29 предназначен для питания схем блоков управления 1 и 6. На приведенных схемах принято, что полюсы 10 и 29 являются отрицательными, а полюсы 11 и 21 - положительными. Первый источник напряжения имеет постоянное напряжение 220 В, второй - постоянное напряжение, величина которого определяется типом использованных микросхем (например, при использовании микросхем серии 561 второй источник напряжения имеет напряжение 12 В).
Предварительно рассмотрим работу отдельных элементов устройства для управления приводом запорного органа и сигнализации его состояния.
Элемент разрешения 5 и элемент включения 17 - фиг. 2 и 3.
Так как схемы элемента разрешения 5 и элемента включения 17 выполнены аналогичными, то они и работают одинаково, поэтому рассмотрим работу только элемента разрешения 5.
В исходном положении кнопка 30 и контакты 31 и 32 разомкнуты, поэтому по цепи полюс 21 - резистор 36 - стабилитрон 37 (находящийся в проводящем состоянии) - переход база-эмиттер транзистора 39 - полюс 29 протекает ток, транзистор 39 открыт и на его выходе находится нулевой сигнал. При замыкании какого-либо контакта, например контакта кнопки 30, база транзистора 39 закорачивается через диод 33 и замкнутый контакт кнопки 30, стабилитрон 37 переходит в непроводящее состояние, транзистор 39 закрывается и на его выходе появляется единичный сигнал.
Датчик тока 12 (13) - фиг. 4.
При отсутствии напряжения между первым и вторым входами подключения датчика тока 12 через светодиод оптрона 56 не протекает ток и оптрон 56 выключен, на входе элемента НЕ 60 находится единичный сигнал, поэтому на выходе датчика 12 находится нулевой сигнал. При появлении напряжения между первым и вторым входами подключения датчика тока через светодиод оптрона 56 начинает протекать ток, открывается транзистор оптрона 56, на входе элемента НЕ 60 появляется нулевой сигнал, а на выходе и соответственно на выходе датчика 12 - единичный сигнал.
Устройство для управления приводом запорного органа работает следующим образом.
В исходном состоянии запорный орган находится в одном из крайних положений - открытом или закрытом, примем, что он находится в закрытом положении, тогда контакт первого конечного выключателя 2 замкнут, а контакт второго конечного выключателя 7 разомкнут. Так как контакт конечного выключателя 2 замкнут, то через первый привод запорного органа 3 протекает ток по цепи: полюс 10 первого источника питания - первый вывод первого привода запорного органа 3 - второй вывод привода запорного органа 3 - включенные параллельно датчик тока 13 и резистор 24 - второй вход подключения датчика тока 12 - первый вход подключения датчика тока 12 - полюс 11 первого источника питания. При выбранной величине сопротивления резистора 55 (51 кОм) датчика тока 12 через светодиод датчика тока 12 протекает номинальный по величине ток и поэтому оптрон 56 этого датчика включен и на выходе датчика тока 12 имеется единичный сигнал. В цепи датчика тока 13 также протекает ток, однако при выбранной величине сопротивления резистора 24 (51 Ом) и резистора 55 (510 Ом) датчика тока 13 его величина недостаточна для включения светодиода датчика тока 13, его оптрон 56 выключен и поэтому на выходе датчика тока 13 находится нулевой сигнал. В цепях датчиков тока 12 и 13 блока управления 6 ток не протекает, т. к. цепи протекания тока через них разомкнуты контактом конечного выключателя 7 и на их выходах находятся нулевые сигналы. В элементе разрешения 5 и элементах включения 17 обоих блоков управления 1 и 6 контакты разомкнуты, поэтому на выходах элемента, разрешения 5 и элементов включения 17 обоих блоков 1 и 6 находится нулевой сигнал.
Для перевода запорного органа в противоположное положение подают сигнал разрешения - в элементе разрешения 5 замыкают или контакт кнопки 30, или контакты 31 или 32, при этом на выходе элемента разрешения 5 появляется единичный сигнал, который должен сохраняться до окончания перевода запорного органа, после этого в первом блоке управления 1 - нажимают кнопку 30 или замыкают один из контактов 31 или 32 в элементе включения 17 блока управления 1 при этом появляется единичный сигнал на выходе элемента включения 17, который поступает на вход элемента И-НЕ 18. На выходе элемента И-НЕ 18 появляется нулевой сигнал, который включает реле 20 через усилитель 19 нулевой сигнал с выхода которого, поступая на вход элемента включения 17, поддерживает единичный сигнал на выходе элемента включения 17 до окончания перевода запорного органа в противоположное положение, т.е. для перевода запорного органа достаточно только нажать и отпустить кнопку или замкнуть и разомкнуть контакт в элементе включения 17. Кроме того, нулевой сигнал с выхода элемента И-НЕ 18 поступает через четвертый выход блока управления 1 на второй вход блока управления 6 и далее на четвертый вход его элемента И-НЕ 18, запрещая включение блока управления 6 до исчезновения этого сигнала. Контакт 22 реле 20 в блоке управления 1 замыкается и ток от первого источника питания начинает протекать через привод запорного органа 3. Запорный орган 3 начинает переводиться в открытое положение. Одновременно в блоке управления 1 контакт 22 шунтирует первый и второй входы подключения датчика, тока 12, его светодиод выключается, т. к. ток через него уменьшается до единиц микроампер, транзистор оптрона 56 этого датчика закрывается и на выходе датчика тока 12 появляется нулевой сигнал. Через резистор 24 и датчик тока 13 теперь протекает ток, величина которого существенно больше чем до этого, т. к. резистор 55 датчика тока 12 (сопротивление которого равно 51 кОм) зашунтирован, величина тока, протекающего через датчик тока 13 равна номинальному значению для включения светодиода его оптрона 56. Открывается транзистор оптрона 56 датчика тока 13 и на его выходе появляется единичный сигнал, поэтому на выходе элемента ИЛИ 16 сохраняется единичный сигнал. В момент начала движения запорного органа в открытое положение замыкается контакт конечного выключателя 7 и в блоке управления 6 срабатывает датчик тока 12, на его выходе появляется единичный сигнал, свидетельствующий о начале перевода запорного органа. В момент окончания перевода запорного органа в открытое положение размыкается контакт конечного выключателя 2 и в цепях включения датчиков тока 12 и 13 блока управления 1 прекращается ток, в блоке управления 1 закрывается транзистор оптрона 56 датчика тока 13, на выходе которого также появляется нулевой сигнал, при этом появляется нулевой сигнал и на выходе элемента ИЛИ 16 блока управления 1, закрывается элемент И-НЕ 18 и выключается реле 20 блока управления 1, размыкается контакт 22 в цепи питания привода запорного органа 3 (на выходе датчика тока 12 блока 1 не появляется сигнал, т. к. цепь включения этого датчика разорвана контактом конечного выключателя 2). При появлении сигнализации об окончании перевода, запорного органа в открытое положение снимается сигнал разрешения с выхода элемента разрешения 5 - отпускается кнопка 30 или размыкаются контакты 31 или 32.
Перевод запорного органа в закрытое положение осуществляется аналогично с помощью блока управления 6.
В том случае, если процесс перевода запорного органа затягивается по какой-либо причине (например, вследствие короткого замыкания в цепи включения привода запорного органа или вследствие попадания в запорный орган постороннего предмета, мешающего его переводу) и его длительность превосходит установленное время - время задержки элемента задержки 14, то на выходе элемента задержки 14 появляется нулевой сигнал, закрывающий элемент И 15 и на его выходе появляется нулевой сигнал, а так как на выходе датчика тока 12 находится нулевой сигнал, то и на выходе элемента ИЛИ 16 появляется нулевой сигнал, закрывается элемент И-НЕ 18 и выключается реле 20, размыкая свой контакт 22 и обесточивая привод запорного органа 3 или 8. При этом закрывается транзистор оптрона 56 датчика тока 13, на выходе которого появляется нулевой сигнал и открывается транзистор оптрона 56 датчика тока 12, на выходе которого появляется единичный сигнал. При появлении сигнализации о превышении времени перевода - появление сигнала малой длительности с выхода, элемента задержки 14 и сигнала с выхода датчика тока 12 и исчезновение сигнала с выхода датчика тока 13 снимают сигнал с выхода элемента разрешения 5, запрещая перевод запорного органа в любое положение и выясняют причину, по которой перевод не был выполнен в установленное время. Таким образом предотвращается выход из строя привода запорного органа из-за длительного протекания через него тока или определяется короткое замыкание в цепи включения привода запорного органа.
Если в процессе перевода запорного органа из одного положения в другое возникнет необходимость его реверса - возврата в положение, из которого он переводится, то необходимо снять сигнал с выхода элемента разрешения 5 - разомкнуть замкнутый контакт - контакт кнопки 30 или контакты 31 или 32. При этом на выходе элемента разрешения появляется нулевой сигнал, закрывается элемент И-НЕ 18, выключается реле 20 и размыкается контакт 22 того блока управления 1 или 6, который находился во включенном состоянии. Запорный орган остается в промежуточном положении. После этого описанным выше порядком переводят запорный орган в необходимое положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи сигналов управления в сети электроснабжения | 1991 |
|
SU1835553A1 |
| Система коммутации исполнительных органов с неразрушающем контролем элементов коммутации и исполнительных органов | 2016 |
|
RU2652718C1 |
| Способ автоматизированного управления напорной оросительной системой | 1989 |
|
SU1706474A1 |
| ТАЙМЕР | 2000 |
|
RU2167463C1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КОНВЕЙЕРАМИ | 2016 |
|
RU2657527C2 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ С ТЕМПЕРАТУРНОЙ ЗАЩИТОЙ ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ | 1996 |
|
RU2120151C1 |
| Устройство для токовой защиты электроустановки | 1990 |
|
SU1777195A1 |
| Участок сети наружного освещения с защитой от аварийных режимов | 1990 |
|
SU1785061A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНОЙ МАШИНОЙ | 1996 |
|
RU2112735C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАПОЛНЕНИЯ РЕЗЕРВУАРОВ ЭЛЕКТРОПРОВОДНОЙ СРЕДОЙ | 1992 |
|
RU2057297C1 |
Изобретение относится к устройствам управления исполнительными механизмами и может быть использовано в газовой промышленности, в частности для управления переводом пневмогидравлического привода газового крана. Технический результат заключается в повышении надежности. Устройство для управления приводом запорного органа содержит два блока управления, конечные выключатели, два привода запорного органа, шины сигнализации, элемент разрешения и два датчика тока. Устройство для управления приводом запорного органа обеспечивает повышение надежности функционирования за счет контроля рабочего положения смежного блока управления и выполнения контроля состояния привода и цепи его включения на оптронных датчиках тока и логических элементах. 6 ил.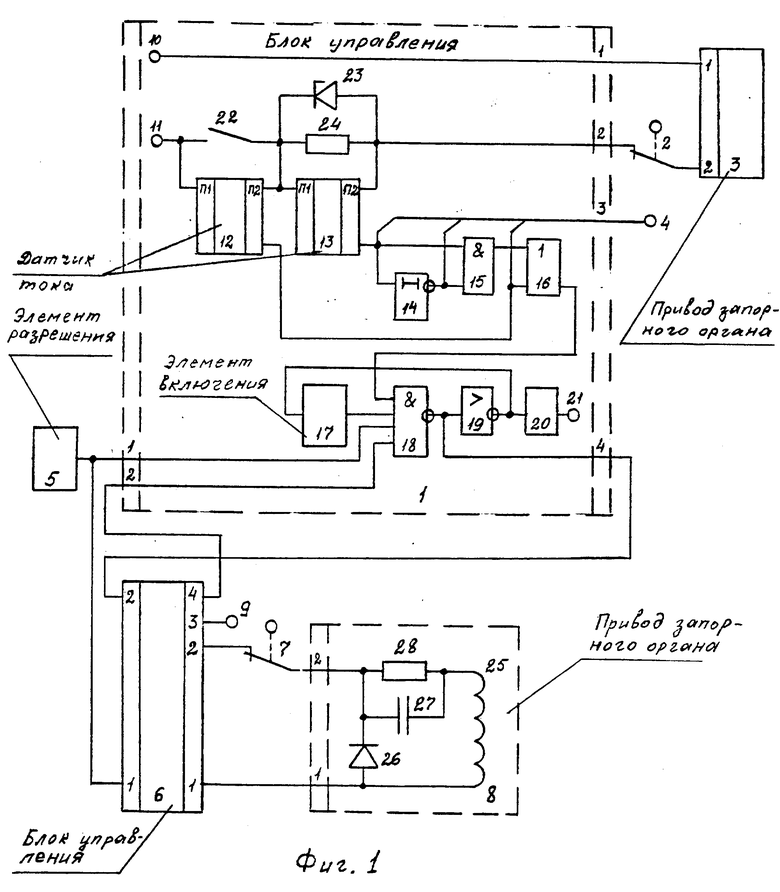
Устройство для управления приводом запорного органа, содержащее первый блок управления, нормально замкнутый контакт первого конечного выключателя, первый привод запорного органа, первый вывод которого соединен с первым выходом первого блока управления, второй выход которого подключен к второму выводу первого привода запорного органа через нормально замкнутый контакт первого конечного выключателя, второй блок управления, нормально замкнутый контакт второго конечного выключателя, второй привод запорного органа, первый вывод которого соединен с первым выходом второго блока управления, второй выход которого подключен к второму выводу второго привода запорного органа через нормально замкнутый контакт второго конечного выключателя, четвертый выход первого блока управления подключен к второму входу второго блока управления, четвертый выход которого соединен с вторым входом первого блока управления, первый и второй блоки управления выполнены одинаково и каждый из них содержит первый и второй источники питания, элемент включения, реле включения, второй вывод которого соединен с первым полюсом второго источника питания, нормально разомкнутый контакт реле включения, первый вывод которого соединен с вторым полюсом первого источника питания, первый полюс которого подключен к первому выходу блока управления, отличающееся тем, что в него введены первая и вторая шины сигнализации и элемент разрешения, выход которого подключен к первым входам первого и второго блоков управления, третьи выходы которых подключены соответственно к первой и второй шинам сигнализации, а в каждый из блоков управления введены первый и второй датчики тока, резистор, стабилитрон, элемент задержки, элементы И, ИЛИ, И-НЕ и усилитель, выход которого подключен к первому выводу реле включения и к входу элемента включения, выход которого соединен с вторым входом элемента И-НЕ, второй полюс первого источника питания соединен с первым входом подключения первого датчика тока, второй вход подключения которого соединен с первым входом подключения второго датчика тока, с вторым выводом нормальноразомкнутого контакта реле включения, с первым выводом резистора и с катодом стабилитрона, анод которого подключен к второму выводу резистора, к второму выходу блока управления и к второму входу подключения второго датчика тока, выход которого соединен с первым входом элемента И и с входом элемента задержки, выход которого соединен с вторым входом элемента И, выход которого подключен к первому входу элемента ИЛИ, второй вход которого соединен с выходом первого датчика тока, а выход - с первым входом элемента И-НЕ, выход которого подключен к входу усилителя и к четвертому выходу блока управления, третий и четвертый входы элемента И-НЕ соединены соответственно с первым и с вторым входами блока управления, выходы элемента задержки, первого и второго датчиков тока соединены с третьими выходами блока управления.
| Устройство для управления приводом запорного органа | 1986 |
|
SU1417071A1 |
| Устройство для управления исполнительным механизмом и сигнализации его состояния | 1988 |
|
SU1693652A1 |
| Устройство для управления приводом запорного органа | 1983 |
|
SU1140184A1 |
