Изобретение относится к устройству и способу для управления жесткой муфтой сцепления в, по крайней мере, частично автоматизированных устройствах механической трансмиссии. Более конкретно, данное изобретение относится к управляющему устройству и способу для трансмиссии транспортных средств, которые будут приводить муфту сцепления в зацепление или настраивать ее для зацепления во время, когда двигатель/часть муфты сцепления, приводимая в движение от входного приводного вала, вращается со скоростью, чуть большей (предпочтительно от примерно 10 до примерно 50 об/мин больше), чем часть муфты сцепления, приводящая в движение выходной вал.
Полностью или частично автоматизированные системы механической трансмиссии для транспортных средств, таких как мощные тягачи - полуприцепные транспортные средства, являются хорошо известными, как можно увидеть в патентах США NN 4361060, 4595986, 4614126, 4648290, 4676115, 4784019, 4874881, 4899607, 5050427 и 5136897. Эти автоматические системы трансмиссии обычно используют датчики для передачи информации, такой как вид привода, или позиция переключателя скоростей, положение педали акселератора, включенное отношение сцепления и двигатель, скорости вращения входного и/или выходного валов, на контроллер. Такой контроллер, обычно выполненный на основе микропроцессора, обрабатывал бы эти входные сигналы в соответствии с заданными заранее логическими правилами для выдачи командных выходных сигналов различным приводным устройствам управления, таким как распределитель горючего в двигателе, привод управления сцеплением, и/или привод управления переключения коробки передач. Управление подачей топлива в двигатель или тормоз входного вала или двигателя, и/или синхронизатор мощности употребляются обычно для того, чтобы заставить входной вал и связанную с ним передачу вращаться с достаточно синхронной скоростью по отношению к скорости вращения выходного вала и конечному передаточному отношению.
Учитывая известные времена реакции для различных приводов управления, когда скорость входного вала (IS) достигает синхронного окна, т.е. произведения скорости выходного вала на необходимое передаточное отношение (OS • GRTARGET) плюс - минус допустимая величина отклонения (обычно около ± 40 об/мин), тогда муфтам сцепления, связанным с конечным передаточным отношением, дается команда к зацеплению в предположении, что ожидаемая скорость вращения входного вала (ISE) будет находиться в приемлемых пределах передаточного отношения частей муфты сцепления, входящих в первоначальное зацепление.
Хотя известные автоматические системы управления механическими трансмиссиями транспортных средств обычно являются удовлетворительными и обеспечивают хорошо синхронизированное зацепление муфты сцепления, они не являются совершенно удовлетворительными когда, особенно при включении более низкой передачи, муфты сцепления, соединенные с включаемым конечным передаточным отношением, имеют тенденцию к зацеплению тогда когда часть муфты сцепления, приводимая в движение входным валом, вращается с более низкой скоростью, чем часть муфты сцепления, связанная с выходным валом. Зацепление муфт сцепления тогда, когда входной вал находится слегка ниже синхронного, будет прекращать легкое снижение скорости транспортного средства, которое не является приятным для водителя, так же как и легкий "толчок", который происходит при зацеплении муфт сцепления тогда, когда входной вал находится слегка выше точной синхронной скорости вращения.
В соответствии с данным изобретением известные недостатки минимизируются или преодолеваются путем создания полностью или частично автоматизированного устройства и способа управления механической трансмиссией транспортного средства, которое как при переключении на более высокую передачу, так и при переключении на более низкую передачу, будет иметь тенденцию осуществлять зацепление муфты сцепления тогда, когда входной вал вращается со скоростью (IS) равной или слегка большей, чем точно синхронная скорость (OS • GRTARGET).
В предпочтительном конкретном исполнении указанное выше сопровождается изменением синхронного окна от (OS • GR) + K ≥ IS ≥ (OS • GR-) - K до (OS • GR) + K ≥ IS > (OS • GR), где: IS скорость входного вала, OS скорость выходного вала, GR численное значение понижения конечного передаточного отношения, K положительная постоянная (примерно от 20 до 40 об/мин).
Значение допустимого отклонения K подбирают как функцию от наиболее жесткого приемлемого переключения, см., например, патент США N 5052535. Как обсуждается более подробно ниже, значение K может также быть функцией от численного значения конечного передаточного отношения.
В качестве альтернативы, которая является менее желательной, конкретного исполнения данного изобретения, если контроллеры и приводы управления не являются достаточно чувствительными для зацепления муфт сцепления в описанном выше синхронном окне, синхронное окно может быть определено как (OS • GR) + K ≥ IS > (OS • GR) - (K/X): где: X = положительное число, большее чем 1.
В качестве примера, если K = 30 и X = 2, тогда синхронное окно было бы (OS • GR) + 30 ≥ IS > (OS • GR) - 15 и система имела бы незначительную тенденцию (т.е. около 67%) к зацеплению муфт сцепления с "толчком".
В качестве другого альтернативного конкретного исполнения, при более низких передаточных отношениях (численно более высокие понижения передачи), значения K может изменяться с изменением численного понижения передачи конечного передаточного отношения до тех пор, пока не будет достигнуто минимальное значение, такое как 30 об/мин.
В другом конкретном исполнении определяют минимальное общее синхронное окно Y (такое как, например 45 об/мин), K является функцией численного понижения передачи с минимальным значением (таким как, например, 30 об/мин), и синхронное окно определяют как (OS • GR) + K ≥ 1S > (OS • GR), если K ≥ Y и (OS • GR) + K≥ IS > (OS • GR) - Y - K), если K < Y.
На практике, поскольку скорость вращения входного вала обычно повышают для достижения синхронности при переключении на более низкую передачу и обычно понижают для достижения синхронности при переключении на более высокую передачу, команды для зацепления муфты сцепления будут слегка запаздывать при переключении на более низкую передачу и, возможно, слегка опережать при переходе на более высокую передачу, при управлении с помощью устройства и способа данного изобретения, по сравнению с известными.
Возможное исключение из рассмотренных выше конкретных исполнений осуществляется в составных трансмиссиях линейного типа, см. патент США N 5193410, где при переключении, в пределах составной передачи на более низкую, для обеспечения точной работы синхронизатора линейных секций, качество переключения может быть согласовано путем воздействия трансмиссии на зацепление главной секции муфты сцепления с конечным передаточным отношением, таким как (OS • GR) > IS > (OS • GR) - Z, где Z представляет собой положительное число об/мин. В последующих описаниях предпочтительных примеров конкретного исполнения это возможное исключение станет понятным.
Соответственно, целью данного изобретения является создание способа и устройства управления для по крайней мере частично автоматизированных систем механической трансмиссии для транспортных средств, которое обеспечивает в результате зацепление муфты сцепления, или стремится осуществить его, при скорости вращения входного вала, равной или слегка превышающей точную синхронную скорость вращения входного вала для зацепления с конечным передаточным отношением (GRTARGET) при данной скорости транспортного средства (OS).
Эта и другие цели и преимущества данного изобретения станут ясны из чтения описания предпочтительного конкретного исполнения, вместе с чертежами.
Фиг.1 представляет собой схематическую иллюстрацию автоматической трансмиссии, наиболее пригодной для управления предлагаемыми способом и устройством.
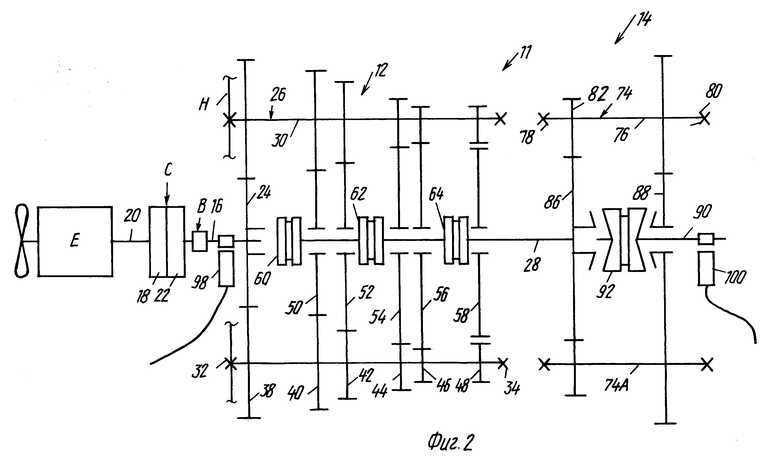
Фиг. 2 представляет собой схематическую иллюстрацию трансмиссии транспортного средства, управляемого способом и устройством данного изобретения.
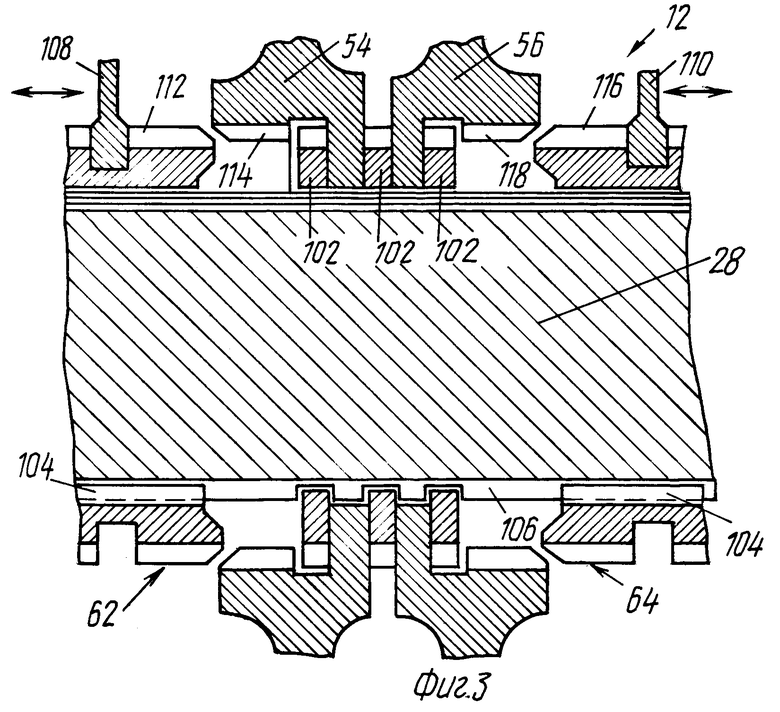
Фиг. 3 представляет собой частичный вид в разрезе типичного узла жесткой муфты сцепления, используемой в автоматических трансмиссиях на фиг.1 и 2.
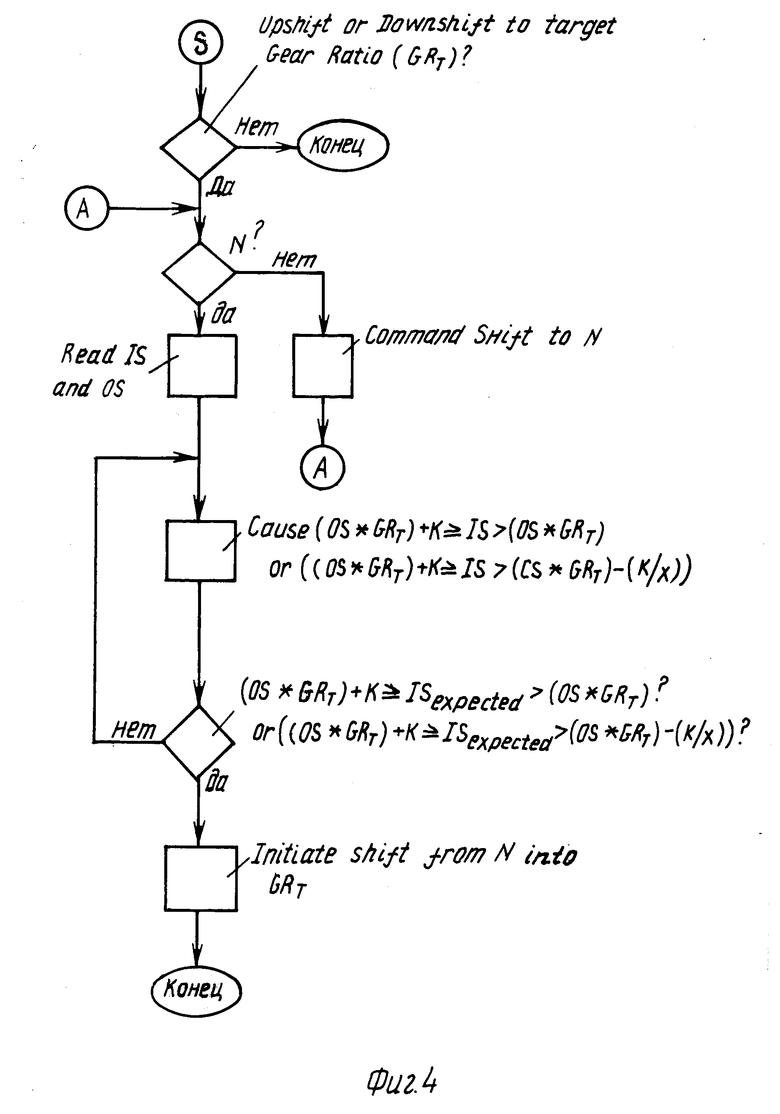
Фиг. 4 представляет собой схематическую иллюстрацию в виде блок-схемы устройства и способа управления данного изобретения.
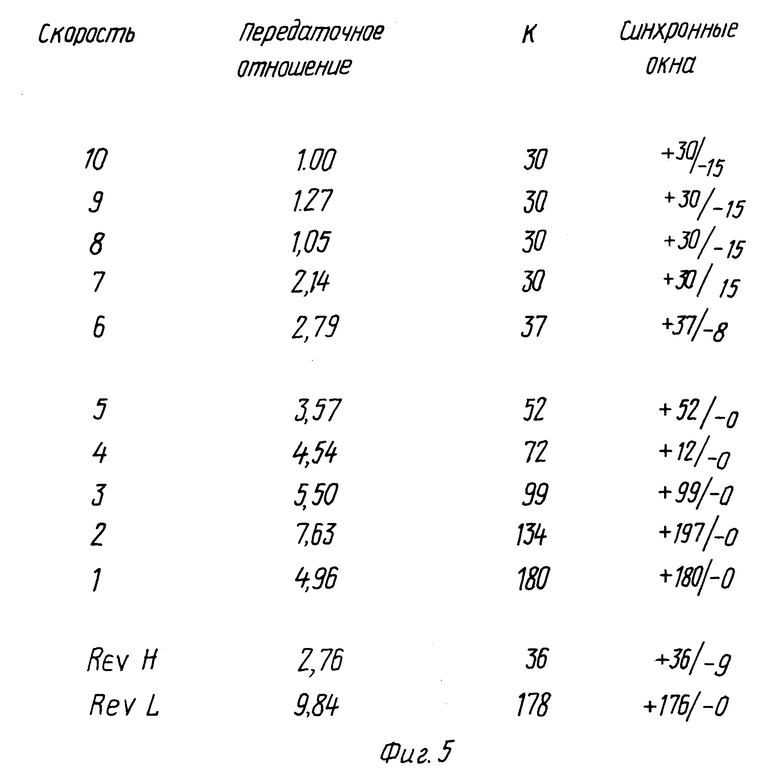
Фиг. 5 представляет собой таблицу, иллюстрирующую численные значения понижения передаточных отношений и типичные значения предельного отклонения для коробки передач, иллюстрированных на фиг.1 и 2.
Конкретная терминология используется в последующем описании только для удобства и упоминания, а не является ограничивающей. Слова "вверх", "вниз", "направо", "налево" означают направление на чертежах, которые упоминаются. Слова "внутрь" и "наружу" относятся к направлениям, соответственно, к геометрическому центру устройства или обозначенной его части, или от него. Указанная терминология включает слова, конкретно рассмотренные выше, их производные и слова с подобным значением.
Термин "составная коробка передач" используется для обозначения коробки передач, изменяющей скорость или передачу, имеющей секцию многоскоростного переключения передних скоростей и вспомогательную секцию коробки передач, соединенных в ряд, где выбранное понижение передачи в главной секции коробки передач может быть составлено путем дальнейшего понижения передачи во вспомогательной секции коробки передач. "Узел синхронизированной муфты" и слова с подобным значением должны означать сборную муфту для неповоротного соединения выбранной шестерни с валом посредством жесткой муфты, где попытка зацепления предотвращается до тех пор, пока части муфты находятся в достаточно синхронном вращении, в устройстве с относительно большой фрикционной емкостью, которое используется с частями муфты и являются достаточными, при запуске зацепления муфты, заставляя части муфты и все детали, вращающиеся вместе с ней, вращаться с достаточно синхронной скоростью.
Термин "переключение на более высокую передачу", как он здесь используется, должен означать переключение с более низкого передаточного отношения скоростей на более высокое передаточное отношение скоростей. Термин "переключение на более низкую передачу", должен означать переключение с более высокого передаточного отношения скоростей на более низкое передаточное отношение скоростей.
Автоматическая трансмиссия транспортного средства 10, которое является особенно хорошо соответствующим для управления с помощью устройства и способа управления, схематически иллюстрируется на фиг.1 и 2.
Фиг. 1 схематически иллюстрирует автоматическую трансмиссию транспортных средств 10, включающую многоскоростную автоматическую коробку передач, изменяющую передачу скорости 10, с приводом от двигателя, управляющего подачей топлива E, такого как хорошо известный дизельный двигатель, посредством ведущего фрикционного сцепления C. Выходом автоматической коробки передач 11I является выходной вал 90, который приспособлен для приводного соединения с соответствующей частью транспортного средства, такого как дифференциал ведущей оси, передаточный картер или подобные им и хорошо известные из уровня техники.
Коленчатый вал 20 двигателя E приводит в движение ведущие диски 18 ведущего фрикционного сцепления C, которые сцеплены за счет трения с ведомыми дисками для приведения в движение входного вала 16 коробки передач 11.
Рассмотренные выше узлы силовой установки воздействуют на различные приборы и/или находятся под их контролем и управлением, каждый из этих приборов обсуждается кратко ниже. Эти приборы включают педаль газа или узел контроля и управления открыванием дросселя подачи горючего 21, который контролирует установленное водителем положение управляющего устройства дросселя подачи горючего THL, прибор контроля горючего 23, контролирующий количество горючего, которое должно подаваться в двигатель E, датчик числа оборотов двигателя 25, который контролирует скорость вращения двигателя, привод управления муфты, 27, который вводит или выводит из зацепления ведущую муфту C, и который может также доставлять информацию о состоянии муфты, датчик скорости вращения входного вала 98 для контроля скорости вращения входного вала коробки передач 16, привод управления коробки передач 29, который служит для переключения коробки передач 11 в положение, соответствующее выбранному передаточному отношению, и для подачи сигнала нейтрального положения и/или включенной в данный момент передачи, и датчик скорости вращения выходного вала 100 для контроля скорости вращения выходного вала 90.
Привод управления коробки передач 27 может быть типа, раскрытого в патентах США NN 4874881 и 1899607.
Рассмотренные выше приборы поставляют информацию и/или принимают управляющие сигналы от обрабатывающего ее центрального узла обработки информации 31. Центральный узел обработки информации 31 может включать аналоговые и/или числовые электронные вычисления и логические цепи, как хорошо известно из уровня техники. Предпочтительно, центральный узел обработки информации основан на микропроцессоре, примером которого может быть рассмотренный выше патент США N 4595986. Центральный узел обработки информации 31 может также получать информацию от узла контроля переключения передач 33, с помощью которого водитель транспортного средства может выбрать способ движения транспортного средства: назад (R), нейтральный (N) и вперед (D). Источник электрического питания (не показан) и/или источник жидкости под давлением (не показан) обеспечивает электрическую и/или пневматическую энергию для различных контрольных, управляющих и/или обрабатывающих информацию узлов.
Части силовой установки и устройства, их контролирующие, типа описанных выше, являются известными из патентов США NN 4959986, 4576065 и 4445393. Датчики 21, 23, 25, 27, 98, 29 и 100 могут быть любого из известных типов конструкций для генерации аналоговых или числовых сигналов, пропорциональных контролируемым ими параметрам. Подобно этому, приводы управления могут быть любого известного электрического, пневматического или электро-пневматического типа для выполнения операции в ответ на выходные управляющие сигналы от центрального узла обработки информации 31.
В дополнение к прямым входам, центральный узел обработки информации может быть снабжен цепью для дифференцирования входных сигналов от по крайней мере датчиков 23, 25 и/или 98 для образования вычисленного сигнала, показывающего вращательное ускорение и/или замедление двигателя, входного вала коробки передачи и/или выходного вала коробки передач. Узел 31 может также быть снабжен цепью и логическими правилами для сравнения входных сигналов от датчиков 98 и 100 для проверки и определения того, что коробка 11 находится в зацеплении, соответствующем конкретному передаточному отношению, и т.д.
Структурные детали автоматической коробки передач можно увидеть на фиг. 2. Составная коробка передач 11 содержит главную секцию коробки передач 12, соединенную последовательно в один ряд со вспомогательной секцией 14. Коробка передач 11 размещена в картере H и включает входной вал 16, приводимый в движение первичным движителем, таким как дизельный двигатель E, через селективно расцепляемое, сцепленное в нормальном состоянии ведущее фрикционное сцепление C, имеющее входную или ведущую часть 18, соединенную для приведения ее в движение с коленчатым валом двигателя 20, и ведомую часть, укрепленную на входном валу коробки передачи так, чтобы вращаться вместе с ним.
Тормоз входного вала B, управляемый с помощью узла 31, предпочтительно, предусмотрен для обеспечения более быстрого переключения на более высокую передачу.
Коробки передач, подобные коробке передач 11 являются хорошо известными из патентов США N 3105395, 3283613, 4754665 и 5193410.
В главной секции коробки передач 12 входной вал 16 несет входную шестерню 24 для приводимых одновременно с ним в движение ряда практически идентичных передаточных узлов 26 и 26A при практически идентичных скоростях вращения. Эти два одинаковых передаточных узла расположены по диаметрально противоположным сторонам главного вала 28, который обычно расположен коаксиально со входным валом 16. Каждый из передаточных узлов содержит передаточный вал 30, поддерживаемый опорами 32 и 34 в картере H. Каждый из передаточных валов снабжен идентичной группой шестерен контрпривода 38, 40, 42, 44, 46 и 48, укрепленных на нем для вращения. Ряд шестерен главного вала 50, 52, 54, 56 и 58 окружает главный вал 28 и могут по выбору приводиться в зацепление, по одной в каждый момент времени, с главным валом 28 для его вращения с помощью скользящих кулачковых хомутов сцепления 60, 62 и 64, как хорошо известно из уровня техники. Соединительная хомуты 60 могут также быть использованы для сцепления входной шестерни 24 и главного вала 28 для обеспечения прямого привода главного вала 28 от входного вала.
Обычно хомуты сцепления 60, 62 и 64 расположены аксиально с помощью вилок переключения передач, связанных с приводом 27, как хорошо известно из уровня техники. Хомуты сцепления 60, 62 и 64 могут быть выполнены типа несинхронизированных двойных кулачковых хомутов двойного действия.
Шестерня главного вала 58 является шестерней заднего хода, находящейся в постоянном зацепляющемся соприкосновении с шестернями передаточного вала 48 посредством промежуточных шестерен (не показаны). Необходимо также заметить, что хотя главная секция коробки передач 12 обеспечивает пять избирательных передаточных отношений передних скоростей, самое низкое передаточное отношение передней скорости, а именно то, что обеспечивается приведением в движение с помощью приводной шестерни главного вала 56 главного вала 28, часто такое высокое понижение передачи необходимо рассматривать как низкую или "ползущую" передачу, которую используют при старте транспортного средства в тяжелых условиях, и обычно не используют наряду с более высокими передачами. Соответственно, хотя главная секция коробки передач 12 обеспечивает пять передних скоростей, это обычно упоминается в качестве главной секции "четыре плюс один", поскольку только четыре передних скорости соединяются с помощью вспомогательной линейной секции коробки передач 14, используемой там.
Муфты сцепления 60, 62 и 64 являются трехпозиционными муфтами, которые могут располагаться в центральной позиции, вне зацепления, как показано, или в крайней правой позиции с полным зацеплением, или в крайней левой позиции с полным зацеплением, посредством привода 27. Только одна из муфт 60, 62 и 64 может находиться в зацеплении в данный момент времени, и предусмотрена блокировка главной секции (не показана) для блокирования других муфт в нейтральной позиции.
Вспомогательная линейная секция коробки передач 14 включает два практически одинаковых передаточных узла 74 и 74A, каждый из которых включает вспомогательный передаточный вал 76, поддерживаемый опорами 78 и 80 в картере H, и несущий две вспомогательных секции передаточных шестерен 82 и 84 для их вращения. Вспомогательные передаточные шестерни 82 являются постоянно соприкасающимися с опорной линейной/выходной шестерней 86, в то время как шестерни секции вспомогательного передаточного вала 84 являются постоянно соприкасающимися с выходной шестерней 88, которая укреплена на выходном валу коробки передач 90.
Двухпозиционный синхронизированный узел сцепления 92, который расположен аксиально с помощью переключающей вилки (не показана), и узел управляющего привода линейной секции переключения 96 предусмотрен для сцепления либо шестерни 86 с главным валом 28, для работы составной коробки передач на низких передачах, либо шестерни 88 с главным валом 28, для прямой работы или работы при высоких передачах составной коробки передач 10.
Хотя вспомогательная секция линейного типа 14, иллюстрирована в виде двухскоростной секции, использующей цилиндрическую или винтовую передачу, понятно, что данное изобретение является также применимым к составным коробкам передач, использующим разъемные или комбинированные линейно/разъемные вспомогательные секции, имеющих три или более селективных линейных отношений и/или использующим передачу планетарного типа. Также, любая одна или более муфт 60, 62 или 64 могут быть типа кулачковых синхронизированных муфт, и секции коробки передач 12 и/или 14 могут иметь одиночный передаточный вал.
Фиг. 3 показывает типичную структуру кулачковой муфты сцепления, использующейся в коробке передач для тяжелых условий работы, автоматизированной с помощью заявленного устройства и способа. Можно увидеть, что шестерни главного вала 54 и 56, окружают главный вал 28 в режиме свободного вращения и остаются в заданном радиальном положении по отношению к главному валу 28 посредством прокладок 102, как подробнее описано в патентах США N 3894621 и 4949589. Хомуты сцепления 62 и 64 снабжены внутренней канавкой 104, которая входит, скользя, в зацепление с наружными шплинтами 106, предусмотренными на наружной боковой поверхности главного вала 28. Хомуты зацепления 62 и 64 расположены аксиально на главном валу 28 посредством переключающих вилок 108 и 110, соответственно, которые управляются управляющим приводом переключения 27. Хомут переключения 62 снабжен зубом кулачковой муфты 112, который может быть селективно приведен в зацепление с зубом муфты сцепления 114, который предусмотрен на шестерне главного вала 56.
Как известно для достижения гладкого зацепления шестерни 54 с главным валом 28, хомут сцепления 62 должен быть приведен в движение направо, чтобы привести зуб сцепления 112 в зацепление с зубом сцепления 114, в то время, как шестерня главного вала 54 вращается со скоростью вращения, которая является практически равной скорости вращения главного вала 28, и с хомутом сцепления 62, который также вращается с ним вместе. Предполагая, что вспомогательная линейная секция 14 остается в зацеплении при отношении скоростей, которое является либо низким, либо средним, скорость вращения хомутов сцепления и главного вала 28 определяется отношением линейной секции и скоростью вращения выходного вала (OS). Во время осуществления переключения передач в главной секции коробки передач 12, скорость передвижения транспортного средства и, следовательно, скорость вращения выходного вала 90, остается практически постоянной. Скорость вращения шестерен главного вала 54 и 56 является функцией от их передаточных отношений и скорости вращения входного вала 16 (IS). Соответственно, для достижения условий практической синхронности зацепления одной из шестерен главного вала, скорость входного вала 16 модулируют посредством управляемой подачи топлива в двигатель E и/или работой тормоза переключения передач B. Как известно при условиях точной синхронности для зацепления конкретного конечного передаточного отношения, IS = OS • GRTARGET и, если муфта 6 полностью сцеплена без проскальзывания, ES = IS = OS • GRTARGET. Практически, приемлемые переключения передач могут быть достигнуты, если части муфты сцепления во вращении отклоняются от синхронности на заданную величину, такую примерно, как от 20 до 40 об/мин. Соответственно, синхронное окно для зацепления с конкретным конечным передаточным соотношением будет IS = (OS • GRTARGET) ± примерно, от 20 до 40 об/мин.
В автоматических или в полуавтоматических известных трансмиссиях время реакции различных управляющих приводов имеет известное или заданное значение, также как и скорость изменения скорости вращения двигателя и/или выходного вала. Основываясь на этих параметрах, как только выходной вал достигает практически синхронной скорости вращения. Узел 31 выдает выходные командные сигналы различным управляющим приводам для начала переключения на заданное конечное передаточное отношение, ожидая при этом, что зуб сцепления войдет в зацепление в момент времени, когда ожидаемая скорость вращения входного вала (ISE) станет равна произведению конечного передаточного отношения на скорость вращения выходного вала плюс или минус заданная постоянная величина.
Хотя системы управления автоматическими коробками передач транспортных средств являются, в целом, удовлетворительными и обеспечивают хорошо синхронизированное зацепление муфты сцепления, они не являются абсолютно удовлетворительными, поскольку, особенно при переключении на более низкую передачу, часть муфты сцепления, связанная с зацеплением конечным передаточным отношением, стремится войти в зацепление тогда, когда часть муфты сцепления, приводимая в движение входным валом, т.е. зубом сцепления, связанным с шестернями главного вала, вращается со скоростью меньшей, чем скорость части муфты сцепления, приводимая в движение выходным валом (т.е. зубом сцепления, связанным с хомутами сцепления). Это дает в результате зацепление муфт сцепления, тогда, когда входной вал имеет скорость, слегка меньшую, чем точная синхронная, что вызывает легкое торможение транспортного средства, которое не так приятно для водителя, как легкий "толчок", который является результатом зацепления муфт сцепления тогда, когда входной вал имеет скорость вращения чуть большую, чем точная синхронная скорость.
Согласно устройству и способу управления данного изобретения, схематически изображенному в виде блок-схемы на фиг.4, синхронное окно определяется так, что узел 31 вызывает или стремится вызвать зацепление муфты сцепления тогда, когда выходной вал вращается со скоростью, равной или слегка превышающей точную синхронную скорость, для зацепления в конечное передаточное отношение. Это дает в результате тенденцию "ощущения толчка" при зацеплении муфты сцепления.
Вышеуказанное сопровождается изменением синхронного окна от (OS • GRTARGET) + K > ISE > (OS • GRTARGET) - K до (OS • GR) + K ≥ IS > (OS • GRTARGET), где: IS = ожидаемая скорость вращения входного вала, OS = скорость вращения выходного вала, GRTARGET) = численное значение понижения передачи в передаточном отношении, и K = постоянная положительная величина (такая как равная или большая, чем примерно, 40 об/мин).
На практике, поскольку скорость вращения выходного вала обычно повышают для достижения синхронности при переключении передачи на более низкую, и обычно понижают для достижения синхронности при переключении передачи на более высокую, команды для зацепления муфты сцепления слегка запаздывают при переключении передачи на более низкую, и, возможно, слегка опережают при переключении передачи на более высокую, по устройству и способу данного изобретения, по сравнению с известными.
Обращаясь к блок-схеме управляющего устройства данного изобретения, как представлено на фиг.4, величина ISE) является ожидаемой величиной скорости вращения входного вала после прохождения периода времени, в целом, равного тому периоду времени, который необходим различным управляющим приводам для ответа на командные выходные сигналы от узла 31 для того, чтобы заставить зуб муфты сцепления, связанный с конечным передаточным отношением войти в начальное зацепление.
Соответственно, можно заметить, что предпочтительное исполнение данного изобретения предусматривает управляющее устройство и способ для управления автоматической коробкой передач, которая обеспечивает зацепление муфты сцепления в то время, когда скорость вращения входного вала равна или слегка превышает точную синхронную скорость вращения, для зацепления в положение конечного передаточного отношения при существующем состоянии транспортного средства.
Величину допустимого отклонения K подбирают как функцию наиболее жесткого приемлемого переключения, см., например, рассмотренный выше патент США N 5052535. Величина K может быть также функцией численного значения конечного передаточного отношения.
В качестве альтернативы, которая является менее желательной, конкретному исполнению данного изобретения, если контроллеры и управляющие приводы не являются достаточно чувствительными для зацепления муфт сцепления вне описанного выше синхронного окна, синхронное окно может быть определено как = (OS • GR) + K ≥ IS > (OS • GR) - (K/X) где: X = положительное число, большее, чем 1.
Таким путем, например, если K = 30 и X = 2, когда синхронное окно составляет (OS • GR) + 30 ≥ IS > (OS • GR) - 15, и система имеет незначительную тенденцию (т.е. около 67%) привести в зацепление муфты сцепления с "толчком".
В дальнейшем альтернативном конкретном исполнении, при более низких передаточных отношениях (более высоких численных понижениях передачи), величина K может изменяться с величиной численного понижения передачи конечного передаточного отношения до тех пор пока не будет достигнуто минимальное значение, такое как 30 об/мин. Обращаясь к фиг.5, K взято таким, чтобы оно было больше, чем (20 • GR) - 19) или 30.
В другом конкретном исполнении определен минимум общего синхронного окна Y (такой, например, как Y = 45 об/мин), K является функцией численного значения конечного передаточного отношения (такого, например, как (20 • GR) - 19), численного понижения передачи с минимальным значением (таким как 30 об/мин, например), и синхронное окно определяют как (OS • GR) + K ≥ IS > (OS • GR), если K ≥ Y и (OS • GR) + K ≥ IS > (OS • GR) - (Y - K), если K < Y. Четвертый столбец. Синхронные окна, на фиг.5, иллюстрирует синхронные окна, определенные с помощью рассмотренных выше примеров.
При более низкой скорости, большем понижении передачи, отношения, такие как от первого (1-е) до пятого (5-е) отношения скоростей в коробке передач с десятью передними скоростями, являются желательными и делают возможным использовать как можно более расширенное синхронное окно. Для обеспечения того, чтобы переключение на более высокую передачу могло быть осуществлено тогда, когда транспортное средство движется в гору, т.е. когда как ES/IS : так и OS возрастают, требует большого синхронного окна. Далее, по отношениям скоростей, большее понижение передачи дает в результате более низкую и более мягкую жесткость приводных соединений, которая имеет тенденцию смягчать жесткость несинхронного зацепления муфты сцепления.
Возможное исключение из сказанного выше могут составлять составные коробки передачи линейного типа, см. рассмотренный выше патент США N 5193410, где при линейном составном переключении передачи на более высокую, такую как переключение со скорости 5 на скорость 6, и переключение скачком со скорости 5 на скорость 7, для обеспечения правильной работы синхронизаторов линейной секции, качество переключения может быть результатом компромисса между влиянием коробки передач на зацепление муфты сцепления главной секции в положение конечного передаточного отношения, такого как (OS • GR) > IS ≥(OS • GR) - K, (или Y, в зависимости от того, что больше). В описаниях предпочтительных конкретных исполнений это возможное исключение становится понятным.
Описанные предпочтительные конкретные варианты данного изобретения являются только одним из примеров и различные модификации и/или перестановки его части и/или стадий не выходят за рамки представленной ниже формулы изобретения.
Изобретение предназначено для управления переключением автоматической трансмиссии. Механическая коробка передач, имеющая ряд избираемых передаточных отношений, включает входной и выходной валы, управляющий узел для получения входных сигналов и для обработки их по заданным логическим правилам для выдачи командных выходных сигналов управляющим приводам системы, в том числе и управляющему приводу коробки передач, а также устройство для выдачи командных сигналов приводам управления для начала зацепления пары частей жесткого зацепления, связанных с конечным передаточным отношением только тогда, когда выражение (OS•GRT+К>ISE>(OS•GRT) является верным, где: OS - скорость выходного вала, об/мин, GRT - численное значение конечного передаточного отношения, К - положительное число, об/мин, ISE - ожидаемая скорость входного вала в момент жесткого зацепления пары частей жесткого сцепления, связанных с конечным передаточным отношением. Такое изобретение позволяет создать полностью или частично автоматизированный способ управления механической трансмиссией транспортного средства, которое как при переключении на более высокую передачу, так и при переключении на более низкую передачу будет иметь тенденцию осуществлять зацепление муфты сцепления тогда, когда входной вал вращается со скоростью равной или слегка большей, чем точная синхронная скорость. 2 с. и 38 з.п.ф-лы, 5 ил, 1 табл.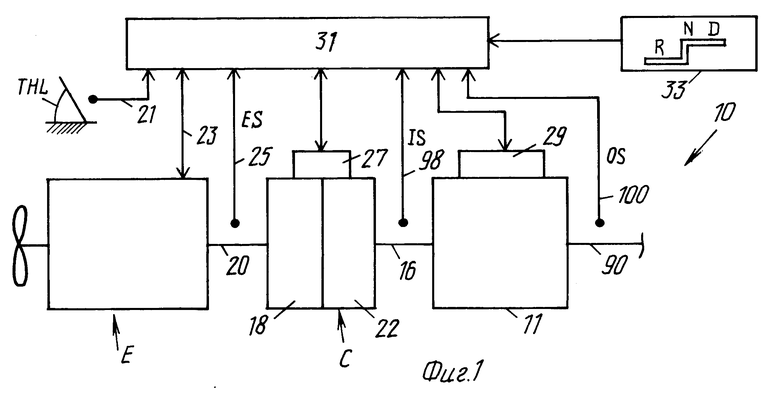
включающее время, требуемой управляющему приводу для ответа на командный выходной сигнал и приведения в движение заданной пары частей жесткой муфты сцепления из нормального расцепленного состояния в положение начального жесткого зацепления, отличающийся тем, что включает стадию выдачи командных выходных сигналов управляющим приводом для начала зацепления пары частей жесткого сцепления, связанных с положением конечного передаточного отношения (GRT) только тогда, когда выражение
(OS • GRT) + K ≥ ISE ≥ (OS • GRT)
является верным,
где OS - скорость выходного вала, об/мин;
GRT - численное значение конечного передаточного отношения;
К - положительное число об/мин; ISE - ожидаемая скорость входного вала в момент жесткого зацепления пары частей жесткого сцепления, связанных с конечным передаточным отношением.
(OS • GRT) > ISE ≥ (OS • GRT) - Y
является верным,
где Y - положительное число об/мин.
(OS • GRT) + K ≥ ISE ≥ (OS • GRT)
является верным,
где OS - скорость выходного вала, об/мин;
GRT - численное значение конечного передаточного отношения;
К - положительное число об/мин; ISE - ожидаемая скорость входного вала в момент жесткого зацепления пары частей жесткого сцепления, связанных с конечным передаточным отношением.
(OS • GRT) > ISE ≥ (OS • GRT) - Y
является верным,
где Y - положительное число об/мин.
(OS • GRT) + K ≥ ISE ≥ (OS • GRT) - (K/X)
является верным,
где X > 1,0.
(OS • GRT) > ISE ≥ (OS • GRT) - Y
является верным,
где Y - положительное число об/мин.
(OS • GRT) + K ≥ ISE ≥ (OS • GRT) - (K/X)
является верным,
где X > 1,0.
(OS • GRT) > ISE ≥ (OS • GRT) - Y
является верным,
где Y - положительное число об/мин.
(OS • GRT) > ISE ≥ (OS • GRT) - Y
является верным,
где Y - положительное число об/мин.
(OS • GRT) + K ≥ ISE > (OS • GRT)
верно, если K ≥ Z
или
(OS • GRT) + K ≥ ISE > (OS • GRT) - (Z - K)
верно, если K < Z,
где Z - минимальное общее синхронное окно об/мин.
(OS • GRT) + K ≥ ISE > (OS • GRT)
верно, если K ≥ Z
или где
(OS • GRT) ≥ ISE > (OS • GRT) - (Z - K)
верно, если K < Z,
где Z - минимальное общее синхронное окно об/мин.
(OS • GRT) > ISE ≥ (OS • GRT) - Y
является верным,
где Y - положительное число об/мин.
(OS • GRT) > ISE ≥ (OS • GRT) - Y
является верным,
где Y - положительное число об/мин.
| US 5050079, 17.09.91, B 60 K 41/08 | |||
| US 4361060, 30.11.82, B 60 K 41/08 | |||
| US 4380048, 12.04.83 | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| US 4599586, 17.06.86 B 60 K 41/00. | |||

