Изобретение относится к области ультразвукового определения местоположения утечки, когда определенные в различных местах на измерительном участке уровни ультразвука представляют на столбиковой диаграмме, по которой определяют местоположение утечки.
Известен способ определения местоположения утечки, основанный на том, что в месте утечки расширяющиеся жидкости, пары или газы создают звук, распространяющийся по твердым телам (корпусный шум). Такие шумы распространяются в соответствующих компонентах (например, в трубопроводах, резервуарах, насосах, вентилях) и измеряются акустическими преобразователями или приемниками звука. Последние расположены на поверхности контролируемых компонентов на определенных расстояниях.
В качестве измеряемой величины при этом используют эффективное или RMS (rout min square) - значение высокочастотных сигналов акустических преобразователей. В процессе нормального режима работы шумы потока вызывают уровень сигнала фона Ео. Неожиданное появление утечки создает шум с уровнем ЕL в месте xi, где размещен соответствующий акустический преобразователь (i = 1, 2, ...), зависящим от величины утечки и удаления ее от акустического преобразователя. Общий уровень шумов ЕL,o в месте xi от наложения шума утечки и рабочего шума определяется по формуле
EL,o= (E
Это означает, что утечка, которая создает в месте xi приемника звука такой же уровень шумов, что и рабочий шум, повышает общий уровень шумов примерно на 40%. Такое увеличение может быть хорошо измерено.
Для определения местоположения утечки следует вначале для каждого места измерения xi из измеренных звуковых уровней приемника определить составляющую, которая определена шумом утечки. Это производят известным образом путем вычитания фонового шума установки согласно
E
Нетто-уровни шумов ЕL 2 в различных местах xi вдоль измерительного участка представляют логарифмически на диаграмме в виде полос, и - коль скоро имеет место утечка - выявляют точку пересечения соответствующих прямых для обозначения места утечки xL.
Другими словами, в рассмотренном здесь способе с помощью жестко установленных приемником в ультразвуковом диапазоне контролируют рабочий уровень шумов (RMS-значение) на аномальные изменения. Диапазон частот выбирают таким образом, чтобы охватить лежащие выше рабочего уровня шумов высокочастотные составляющие шум течи, но чтобы низкочастотные, механически возбужденные звуковые волны могли быть отфильтрованы. В нормальном режиме работы RMS-значения отдельных приемников являются в значительной степени постоянными, утечки же, напротив, вызывают рост указанных значений. Согласно известному способу отсюда для каждого приемника определяют составляющую, вызванную исключительно утечкой: она закономерно убывает с увеличением расстояния от течи.
Как уже упоминалось, эту составляющую представляют логарифмически в виде функции от отдельных мест приемников xi на столбиковой диаграмме. Более длинные или разветвленные трубопроводы разделяют на контролируемые отрезки, и для каждого отрезка строят соответствующую диаграмму.
Внутри одной компоненты (фланец, насос и т.д.) контролируемой установки условия распространения звука являются, как правило, очень сложными и, в частности, могут регистрироваться с очень большим трудом. Так, примененные для определения местоположения утечки на такой компоненте приемники получают звуковой сигнал, о котором априори нельзя сказать, насколько велико было его затухание. Также и связь приемников оказывает влияние на измеренный уровень шумов и определение места. Предшествующий способ определения местоположения не учитывает этот факт, отчего страдает точность определения местоположения.
В основе изобретения лежит задача дальнейшего усовершенствования способа названного вида для повышения точности определения местоположения утечки.
Техническим результатом, на достижение которого направлено изобретение, является повышение точности определения местоположения за счет исключения позиционной погрешности и/или ошибки измерения путем калибровки индивидуального ультразвукового приемника.
Технический результат достигается тем, что в способе ультразвукового определения местонахождения утечки, при котором определяют уровни ультразвука, вызванного утечкой, установленными на измерительном участке ультразвуковыми приемниками, а местоположение утечки определяют по столбиковой диаграмме измеренных уровней ультразвука, для определения местоположения утечки используют диаграмму, в которой положение и длина столбика, соответствующего уровню ультразвука, измеренному размещенным в труднодоступном месте ультразвуковым приемником откорректированы с учетом предварительно определенных для данного приемника позиционной погрешности и/или значения коррекции неверно измеренного уровня ультразвука из-за ошибки коэффициента усиления. Позиционную погрешность ультразвукового приемника, расположенного в труднодоступном месте и значение коррекции неверно измеренного уровня ультразвука из-за ошибки коэффициента усиления можно определить по заданным прямым, характеризующим зависимость уровней М1 и М2 в логарифмическом масштабе ультразвуковых сигналов, передаваемых расположенными по одну и другую стороны от упомянутого приемника в точках х1 и х2 измерительного участка калибровочными передатчиками, от местоположения х приемника ультразвукового сигнала в интервале между точками х1 и х2 из условий:
d=xF - xT и
K=M1T-M1F=M2T-M2F,
где d - позиционная погрешность;
К - значение коррекции неправильно измеренного уровня ультразвука;
xF - неточно определенное местоположение ультразвукового приемника, установленного в труднодоступном месте на измерительном участке;
xT - местоположение ультразвукового приемника, при котором уровни ультразвуковых сигналов, переданных одним и другим калибровочными передатчиками, расположенными в точках x1 и x2 измерительного участка по одну и другую стороны от указанного приемника, равны величинам M1T и M2T;
M1F и M2F - уровни указанных ультразвуковых сигналов, принятые и измеренные данным ультразвуковым приемником; при формировании указанных измерительных прямых уровни сигналов, передаваемых калибровочными передатчиками, можно определить с помощью позиционно точно и корректно расположенных чувствительных элементов или одного позиционно-переменного чувствительного элемента, при этом измерения осуществляют на данном или на другом аналогичном измерительном участке.
На чертеже показан пример выполнения изобретения.
При рассмотрении чертежа исходят из того, что для ультразвукового определения местоположения утечки вдоль измерительного участка предусмотрена установка множества (не показанных) ультразвуковых приемников. Для калибровки взят индивидуальный чувствительный элемент в месте xF. Так как далее исходят из того, что определение места xF является неточным и что этот чувствительный элемент сам показывает неправильно, например, вследствие ошибочной связи или вследствие некорректного усиления своего выходного сигнала. Трудности в этом отношении могут появляться, в частности, при скачках затухания вдоль измерительного участка. Для определения места течи, таким образом, имеет значение определение действительного места xT и действительного уровня MT, который собственно должен бы инициироваться в случае этого чувствительного элемента. Так как можно сказать, что определение места течи при более позднем измерении является безусловно ошибочным на ту позиционную погрешность, с которой было неточно определено положение чувствительного элемента. Подобное определение положения на электростанциях является часто проблематичным, так как доступ к некоторым компонентам вряд ли возможен, например, из-за расположенных на них изоляций. Вследствие этого препятствия положение чувствительного элемента может быть известно, например, с точностью до полуметра. Несмотря на это, место течи должно определяться с точностью до нескольких сантиметров.
Передатчиками, установленными в точках x1 и x2 по обе стороны от расположенного в точке xF чувствительного элемента, передаются ультразвуковые сигналы. Их уровни, зафиксированные указанным чувствительным элементом, равны соответственно MF1 и MF2.
Позиционную погрешность d ультразвукового приемника, расположенного в труднодоступном месте xF и значение коррекции К неверно измеренного уровня ультразвука из-за ошибки коэффициента усиления определяют по заданным прямым G1 и G2, характеризующим зависимость уровней M1 и M2 в логарифмическом масштабе ультразвуковых сигналов, передаваемых расположенными в точках x1 и x2 измерительного участка калибровочными передатчиками, от местоположения x приемника ультразвукового сигнала в интервале между точками x1 и x2 из условий: d = xF-xT и
К = M1T - M1F = M2T - M2F,
где d - позиционная погрешность,
К - значение коррекции неправильно измеренного уровня ультразвука
xF - неточно определенное местоположение ультразвукового приемника, установленного в труднодоступном месте на измерительном участке,
xT - местоположение ультразвукового приемника, при котором уровни ультразвуковых сигналов переданных одним и другим калибровочными передатчиками расположенными в точках x1 и X2 измерительного участка по одну и другую стороны от указанного приемника, равны величинам M1T и M2T,
M1F и M2F - уровни указанных ультразвуковых сигналов, принятые и измеренные данным ультразвуковым приемником.
При формировании указанных измерительных прямых G1 и G2 уровни сигналов, передаваемых калибровочными передатчиками, определяют с помощью позиционно точно и корректно расположенных чувствительных элементов или одного позиционно-переменного чувствительного элемента, при этом измерения осуществляют на данном или на другом аналогичном измерительном участке.
В первом случае калибровочные передатчики располагают по одну и другую стороны от предположительно ошибочно измеряющего и/или ошибочно позиционированного чувствительного элемента (точка xF).
Ниже представлено пояснение того, как производится математическое определение величин коррекции d и К, используемых для дальнейшего более точного определения места течи.
Первая прямая G1 может быть описана следующим образом: M1= -α(x-x1)+M(x1)
Соответственно вторая прямая G2 может быть описана следующим образом: M2= +α(x-x2)+M(x2)
Результатами измерения посредством первого и второго передатчиков являются значения M1F и M2F. Известным является xF. Таким образом, для действительного места чувствительного элемента xT справедливо:
xT = xF - d
Так как преимущественно работают с логарифмическими величинами, далее справедливо:
M1T = M1F + K,
M2T = M2F + K
Из этих уравнений могут быть образованы уравнения с неизвестными d и K. Последние могут быть определены из указанных уравнений. Таким образом также могут быть определены истинное место xT и истинное усиление MT чувствительного элемента.
После того, как эта калибровка произведена, можно использовать величины коррекции d и К при последующем определении местоположения утечки, которое производят по соотношениям
xT = xF - d,
или
MT = MF(xF) + К.
Величины коррекции d и К, для всех чувствительных элементов могут быть запомнены в виде таблицы в вычислительном устройстве. Значения К однако могут также приводить к коррекции регулировки усиления отдельных усилителей соответствующих чувствительных элементов.
При ультразвуковом определении местоположения утечки определяют уровни ультразвука, вызванного утечкой. Местоположение утечки определяют по столбиковой диаграмме измеренных на измерительном участке уровней ультразвука. Положение и длина столбика, соответствующего уровню ультразвука, измеренному в труднодоступном месте, откорректированы с учетом предварительно определенных позиционной погрешности и/или значения коррекции неверно измеренного уровня ультразвука из-за ошибки коэффициента усиления. Технический результат заключается в повышении точности определения утечки. 2 з.п.ф-лы, 1 ил.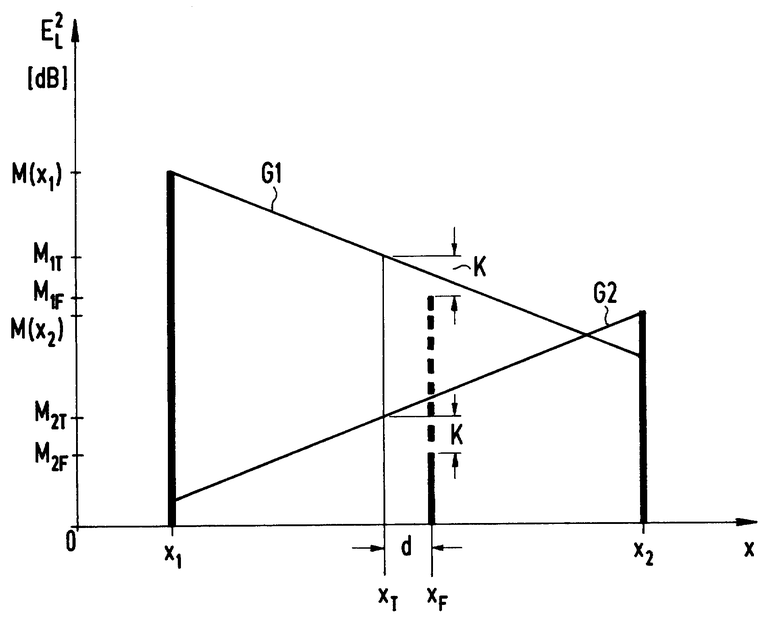
d = xF - xT,
K = M1T - M1F = M2T - M2F,
где d - позиционная погрешность;
K - значение коррекции неправильно измеренного уровня ультразвука;
xF - неточно определенное местоположение ультразвукового приемника, установленного в труднодоступном месте на измерительном участке;
xT - местоположение ультразвукового приемника, при котором уровни ультразвуковых сигналов, переданных одним и другим калибровочными передатчиками, расположенными в точках x1 и x2 измерительного участка по одну и другую стороны от указанного приемника, равны величинам M1T и M2T,
M1F и M2F - уровни указанных ультразвуковых сигналов, принятые и измеренные данным ультразвуковым приемником.
| EP, 0140174 A 08.05.85 | |||
| SU, 1025745 A 30.06.83 | |||
| SU, 1376038 A, 23.02.88. |
