Данное изобретение касается интеллектуального двухпроводного датчика регулируемого параметра процесса с питанием от токовой петли.
Датчики параметров процессов широко используются для считывания или измерения параметров процессов и дистанционной передачи полученных данных. Обычным средством для передачи таких данных является токовая петля, при этом значение параметра представляется величиной тока, проходящего по петле, эта величина находится между заданными минимальным и максимальным значениями, обычно равными 4 и 20 мА соответственно. Такая токовая петля имеет высокую степень помехозащищенности и находит широкое применение в промышленности.
Для питания датчика обычно требуется электроэнергия и часто бывает удобным получать эту электроэнергию за счет тока, протекающего в петле. Ограничивающим условием для таких датчиков является то, что они должны работать при минимальном уровне тока петли, в типичном случае - при 4 мА. В последние годы был разработан ряд "сообразительных" или "интеллектуальных" датчиков, в которых используются микропроцессоры или микроконтроллеры (далее будет использоваться общее название микропроцессор) для управления считыванием или измерением регулируемого параметра процесса и для преобразования формируемых данных в надлежащие уровни тока в петле.
Для многих микропроцессоров и других электронных цифровых устройств, в особенности изготовленных с использованием технологии комплементарных структур металл-оксид-полупроводник, характерно то, что их потребление тока возрастает с повышением скорости работы. Потребление тока для других операций, которые могут выполняться в датчике, также может зависеть от скорости работы. Например, там, где в состав датчика входит акустическое устройство измерения расстояния, использующее отражение импульсов, каждый импульс или пачка импульсов акустической энергии влечет за собой расход определенного количества электрической энергии и частота следования импульсов должна сохраняться достаточно низкой, чтобы необходимое для подачи требуемой энергии среднее значение тока могло быть обеспечено током, имеющимся для питания датчика в целом. В результате этого ограничения некоторые интеллектуальные датчики способны выполнять измерения только с более низкой скоростью, чем было бы желательно.
Примеры интеллектуальных датчиков описаны в опубликованных международных заявках WO 88/01417 и WO 89/02578, а также в патентах США NN 4607247, 4691328, 4729125, 5083288, 4494183, 4520488, 4926340 и 4742574. В некоторых из этих устройств используются батареи или внешние источники питания, в других предусмотрены меры для ограничения средней потребляемой мощности. Так, в патенте N 4926340 используется как микропроцессор с малым потреблением мощности, так и схема накопления и распределения энергии, предназначенная для удовлетворения дополнительной, редко возникающей потребности в электроэнергии. В патенте США N 4742574 описана схема, использующая операционный усилитель, который может переключаться в режим с высоким или низким потреблением мощности. В патенте США N 4823600 предложен датчик в виде ультразвукового датчика, обеспечивающий выход на токовую петлю с током 4-20 мА, однако датчик получает питание отдельно.
Поскольку потребление мощности некоторых микропроцессоров может снижаться при уменьшении тактовой частоты, определяющей скорость их работы, были сделаны предложения по снижению потребления мощности оборудования с микропроцессорным управлением путем уменьшения тактовой частоты либо когда полная скорость не является необходимой, как описано в журнале Electronic Design, Vol. 32, N 20, October 1984, p.p. 185-191, либо в ответ на низкое напряжение батареи, как описано в JA-A-04/096810.
Целью настоящего изобретения является усовершенствование управления питанием в интеллектуальном датчике с питанием от токовой петли.
Изобретение относится к интеллектуальному датчику с питанием от токовой петли, предназначенному для включения в токовую петлю и содержащему микропроцессор, запоминающее устройство для хранения программы, предназначенной для выполнения микропроцессором, схемные элементы для измерения регулируемого параметра под управлением микропроцессора в соответствии с хранимой программой, схему управления током, управляемую микропроцессором и определяющую амплитуду протекающего в токовой петле тока в пределах между максимальным и минимальным конечными значениями в заданном соотношении с измеренным значением параметра процесса, и схему стабилизации питания, отбирающую мощность из токовой петли и подающую питание с регулируемым напряжением на микропроцессор и элементы измерительной схемы. В соответствии с изобретением датчик содержит чувствительную схему, выполненную с возможностью формирования сигнала в ответ на дефицит способности петли удовлетворить суммарную потребность в мощности питания микропроцессора и элементов измерительной схемы, и средства управления микропроцессором в ответ на этот сигнал для задержки дальнейшего выполнения хранимой программы на время, достаточное для уменьшения суммарной потребности в мощности с ликвидацией указанного дефицита. Согласно одному из вариантов осуществления изобретения используется микропроцессор, который в дополнение к своему режиму нормальной работы имеет режим "сна" с низким потреблением мощности, в котором выполнение программы останавливается. Дефицит мощности приводит к остановке выполнения программы и, следовательно, управляемых микропроцессором процессов измерения до тех пор, пока дефицит не будет ликвидирован, таким образом программа выполняется прерывисто. Длительность прерываний зависит от интервала времени, в котором потребность в мощности питания для нормальной работы превышает мощность, имеющуюся в распоряжении. В соответствии с другим вариантом осуществления изобретения в устройстве используется микропроцессор такого типа, потребление мощности у которого пропорционально его тактовой частоте (например, у большинства микропроцессоров на комплементарных структурах металл-оксид-полупроводник) и который может удовлетворительно работать в широком диапазоне тактовых частот, а тактовая частота понижается от обычного максимального значения в ответ на дефицит мощности. Первый вариант более предпочтителен в случае, когда определенная операция, управляемая микропроцессором, должна выполняться в реальном времени.
Предлагаемые устройства могут позволить более эффективно использовать мощность, которую можно получить из петли. В отличие от известных датчиков, например, описанного в патенте США N 4607247, где потребляемая датчиком мощность должна быть ограничена до уровня, который может быть обеспечен при минимальном токе петли, в предлагаемом датчике потребляемая мощность может иметь любое значение вплоть до или даже свыше того, которое может быть обеспечено при максимальном токе петли. Часто бывает так, что измерения на одном конце измерительного диапазона датчика являются более критичными, чем на другом, и путем представления данных в этом конце диапазона максимальным током петли можно обеспечить выполнение датчиком измерений в этом конце диапазона с максимальной скоростью. На другом конце диапазона выполнение программы будет более медленным, однако средняя скорость выполнения не должна быть меньше, чем в известных датчиках, в которых потребление мощности всегда ограничено той величиной, которая может быть обеспечена минимальным током петли.
На фиг. 1 показана блок-схема примера выполнения предлагаемого датчика для управления технологическим процессом, получающим питание от токовой петли.
На фиг. 2 показана более подробная схема части датчика.
Изобретение описано ниже на примере датчика, содержащего акустическое устройство измерения расстояния, использующее эхо-импульсы, однако должно быть ясно, что оно распространяется также на датчики, измеряющие другие параметры процесса, и что признаки, связанные с измерением дальности с помощью эхо-импульсов, не относятся к изобретению в его самом широком аспекте. Такие методы измерения дальности описаны в более ранних патентах и заявках, например, в патентах США NN 4831565 и 5267219.
Микропроцессор 2, например, 68HC11A1 фирмы Motorola, связан с запоминающим устройством 4, представляющим собой, например, постоянное запоминающее устройство, хранящее управляющую программу для микропроцессора, запоминающим устройством 6 с произвольной выборкой, обеспечивающим рабочую память и временное хранение переменных, и энергонезависимым запоминающим устройством 8 для хранения рабочих параметров в условиях падения питания. Этот микропроцессор изготовлен с использованием технологии комплементарных структур металл-оксид-полупроводник и обеспечивает режим "сна", в котором формирование его внутренних тактовых импульсов останавливается и он прекращает выполнение команд, сохраняя содержимое всех своих внутренних регистров до тех пор, пока не примет сигнал "пробуждение".
Принятый сигнал в приемнике усиливается с регулируемым коэффициентом усиления и логарифмическим усилителем перед дискретизацией и преобразованием в цифровую форму, пригодную для обработки процессором 2 с целью идентификации и проверки эхо-импульсов и вычисления расстояния до заданной поверхности с использованием известных методов. Эти методы не являются частью настоящего изобретения за исключением того, что они выполняются в соответствии с хранимой программой и требуют значительного времени для выполнения. Через защитную резисторную схему 22, ограничивающую ток, микропроцессор управляет также дисплеем и кнопочным пультом 20 управления.
Цифровые данные, представляющие требуемый ток в петле, который, в свою очередь, характеризует измеренное расстояние до заданной поверхности, с выхода процессора подаются на схему 14 сдвига уровня и затем на схему 16 управления током, которая преобразует их в аналоговую форму и управляет транзистором Q11. Этот транзистор регулирует ток в петле между клеммами A и B, подключенными последовательно с источником питания 24 В к удаленному токочувствительному элементу (не показаны). Транзистор выполняет это регулирование, реагируя на напряжение на резисторе R50, который включен в петлю вместе с транзистором Q11 и накопительным конденсатором C8, и сравнивая его с аналоговым сигналом.
Для того, чтобы чрезмерно большие напряжения, образующиеся в схеме, не влияли на внешнюю часть токовой петли в системах, где должна быть обеспечена безопасная эксплуатация, петля содержит вблизи клеммы A последовательно включенные диоды D2, D3, D4, которые, кроме того, защищают датчик от ошибочного обратного включения, а также стабилитроны D1 и D5, предотвращающие возникновение избыточного напряжения на датчике.
Накопительный конденсатор C8 включен параллельно входу схемы 18 стабилизации питания, выполненной в виде коммутационного источника 18 питания, а линия XIRQ микропроцессора (линия запроса прерывания, предназначенная для подачи в микропроцессор внешнего сигнала XIRQ прерывания), вместе со входной линией P его порта используется для управления режимом его работы. Если микропроцессор работает нормально, линия P регулярно контролируется, чтобы определить, не должен ли микропроцессор выполнить команду, переводящую его в режим "сна". Например, этот порт может контролироваться программой обслуживания прерываний в реальном времени, которая выполняется в заданные временные интервалы. Когда такой микропроцессор находится в режиме "сна", переход линии XIRQ в другое логическое состояние будет заставлять его "пробуждаться" и возвращаться в нормальный рабочий режим. Поэтому последовательные изменения логического состояния линии XIRQ и линии P могут быть использованы для перевода микропроцессора в режим "сна" и вывода из этого режима. Для других микропроцессоров, имеющих режим "сна", могут быть выполнены соответствующие изменения, чтобы обеспечить требуемое переключение режимов в соответствии с опубликованными характеристиками используемого микропроцессора.
Микропроцессор начинает измерение расстояния путем подачи последовательности импульсов с надлежащей частотой повторения, например 55 кГц, на возбудитель датчика, упрощенно показанный на схеме в виде одного транзистора Q5, включенного последовательно с первичной обмоткой повышающего трансформатора T1 и источником питания 10 В, рассмотренным ниже. Датчик содержит элементы схемы, предназначенные для измерения регулируемого параметра процесса под управлением микропроцессора и представляющие собой пьезоэлектрический преобразователь 10 и приемник 12. Вторичная обмотка трансформатора подключена к пьезоэлектрическому преобразователю 10, так что последовательность импульсов дает в результате импульс высокочастотной энергии с большой амплитудой (в типичном случае 500 В от пика к пику), который прикладывается к преобразователю. Преобразователь реагирует на него излучением импульса ультразвуковой акустической энергии, который отражается заданной поверхностью, расстояние до которой необходимо определить, обратно на преобразователь в виде эхо-сигнала. Принятая преобразователем отраженная энергия подается на приемник 12 через схему ограничения, содержащую резистор R1 и включенные встречно диоды D9 и D10, которые служат как для ограничения амплитуды подаваемых на вход приемника сигналов, так и для демпфирования колебаний преобразователя, имеющих большую амплитуду.
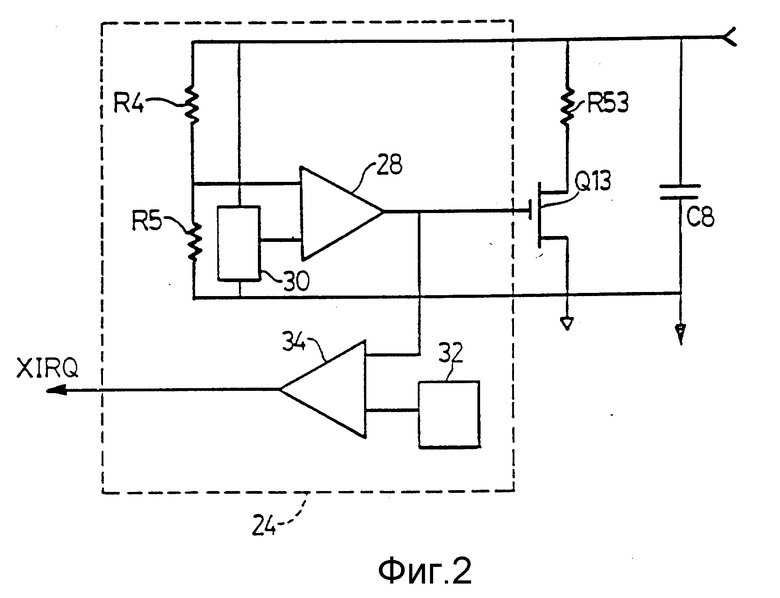
Схема 24 фиксации уровня ограничивает до 10 В возникающее на конденсаторе C8 напряжение путем включения и выключения транзистора Q13. Он подключает резистор R53 параллельно конденсатору, при этом отводится избыточный зарядный ток. Таким образом, транзистор Q13 представляет собой средство, управляемое первым пороговым детектором, для подключения резистивного шунта, образованного резистором R53, к конденсатору C8. Схема 24 фиксации уровня управляет также линией XIRQ микропроцессора 2, как будет рассмотрено ниже со ссылкой на фиг.2.
Питание 10 В с конденсатора 8 подается на коммутационный источник 18 питания, который подает стабилизированное питание 5 В на микропроцессор 2, дисплей 20, приемник 12, запоминающие устройства 4, 6 и 8, а также на преобразователь 26, вырабатывающий питание - 5 В относительно общей земли, созданной подключением к нижнему выводу конденсатора C8. Источники питания 10 В и -5 В совместно обеспечивают питание 15 В, подключенное к первичной обмотке трансформатора T1, для питания датчика.
При работе датчика с микропроцессором, работающим в своем нормальном режиме, микропроцессор и все связанные с ним схемы за исключением Q5 будут потреблять относительно установившийся ток, который в значительной степени будет зависеть от тактовой частоты микропроцессора. Каждый раз, когда преобразователь будет возбуждаться для создания импульса акустической энергии, имеет место кратковременное, но значительно большее потребление тока. Необходимо, чтобы суммарный средний ток, отбираемый из петли схемой в целом, не превышал тока в петле, представляющего значение самого последнего измерения, при этом этот ток может принимать любое значение между 4 и 20 мА в соответствии с измеренным значением. В частном примере, который был описан, и в типичных условиях полное среднее значение тока, отбираемого из петли датчиком при непрерывной работе, составляет около 16 мА. Очевидно, что такой ток не может быть обеспечен, если измеренные значения представлены током петли менее, чем 16 мА, и будет иметь излишек, если измеренные значения представлены током петли свыше 16 мА.
Этой ситуацией управляет схема 24 фиксации уровня, показанная более подробно на фиг. 2 и представляющая собой чувствительную схему, формирующую сигнал XIRQ в ответ на дефицит способности петли удовлетворить суммарную потребность в мощности питания. Напряжение на конденсаторе C8 приложено к делителю напряжения, образованного резисторами R4 и R5; напряжение из точки их соединения подается на один вход усилителя 28, а опорное напряжение от опорного источника 30 подается на другой вход этого усилителя. Усилитель 28, включенный указанным образом, представляет собой первый пороговый детектор 28. Если напряжение на конденсаторе C8 возрастает свыше 10 В, транзистор Q13 включается и пропускает избыточный ток параллельно конденсатору C8. Когда напряжение падает до 10 В, транзистор Q13 выключается, и если напряжение продолжает падать, то напряжение на выходе усилителя 28 падает ниже напряжения, подаваемого опорным источником 32 на опорный вход компаратора 34, представляющего собой второй пороговый детектор, выходной сигнал которого, подаваемый на линии XIRQ и P, в этом случае изменяет свое состояние с низкого логического уровня на высокий. Это состояние линии P указывает на то, что микропроцессор как можно скорее должен быть переведен в режим "сна". Если программа обнаруживает состояние линии P, например, при помощи упомянутой выше подпрограммы обслуживания прерываний в реальном времени, то она может выполнить команду останова для перевода микропроцессора в режим "сна". Это в свою очередь уменьшает потребление им тока, а также потребление тока связанными с ним схемами, до очень низкого уровня, позволяющего конденсатору C8 перезаряжаться до тех пор, пока логическое состояние линии XIRQ снова не изменится на низкий логический уровень так, что микропроцессор запустится снова. Если потребность в токе будет продолжать превышать ток, который может быть в данный момент предоставлен, весь процесс будет повторяться, причем микропроцессор будет поочередно включаться и выключаться с таким коэффициентом загрузки, чтобы уменьшить среднее значение потребляемого тока до тока, который может быть получен от петли. Это замедляет выполнение программы - например, когда ток петли составляет 4 мА, одно измерение может длиться в 5 раз дольше, чем когда он равен 16 мА или более.
Программа должна быть составлена так, чтобы она не могла перевести микропроцессор в режим "сна" во время выполнения подпрограммы, на которой задержка могла бы сказаться неблагоприятно. Например, микропроцессор должен оставаться полностью действующим во время операций в реальном масштабе времени, таких как генерация импульса акустической энергии, а также дискретизация, аналого-цифровое преобразование и хранение отраженного эхосигнала, хотя последующая обработка может прерываться без какого-либо ущерба. Если входная линия P контролируется подпрограммой обслуживания прерываний в реальном времени, то это удобно сделать путем блокирования этой подпрограммы при выполнении критических частей программы. Альтернативно, в течение критических частей программы может быть установлен флаг, который проверяется, чтобы определить, может ли процессор быть переведен в режим "сна" без риска, таким образом обеспечивается возможность, если необходимо, отсрочить переход в этот режим.
Если интеллектуальный датчик работает так, что работа управляющей программы в реальном времени не требуется, и программа не содержит подпрограмм, зависящих от тактовой частоты, то может быть применен упрощенный способ управления мощностью, потребляемой микропроцессором, изготовленным по технологии комплементарных структур металл-оксид-полупроводник. Согласно этому способу, выходной сигнал усилителя 28 используется для управления генератором, управляемым напряжением, который обеспечивает главные тактовые импульсы для микропроцессора и замедляет выполнение программы, когда напряжение на конденсаторе C8 падает ниже 10 В.
Емкость конденсатора C8 должна, быть достаточно большой, чтобы избежать излишне частого переключения микропроцессора в режим "сна" и из него и сделать возможной, как было рассмотрено выше, отсрочку перехода в режим "сна", обеспечивая подачу на микропроцессор достаточной мощности во время выполнения служебных подпрограмм "реального масштаба времени". Если необходимо, среднее значение потребления мощности во время выполнения таких подпрограмм может превышать мощность, соответствующую максимальному току петли, при условии, что достаточная задержка может быть применена где-нибудь в другом месте цикла измерения, чтобы снизить общий средний ток до значения, обеспечиваемого петлей. Поддержанию достаточной мощности в микропроцессоре может способствовать питание трансформатора T1 через дополнительную фильтрующую цепь, содержащую последовательно включенный резистор с низким сопротивлением и параллельно включенный конденсатор большой емкости.
Рассмотренные средства для управления режимом "сна" микропроцессора и реализация схемы фиксации уровня или эквивалентной ей схемы являются лишь примерами средств, которые могут быть использованы для этой цели, хотя и представляют собой лучшие варианты, известные заявителю в настоящее время.
Должно быть понятно, что особенность изобретения состоит в том, что измерения на том конце диапазона, который представлен низким значением тока, могут выполняться значительно медленнее, чем на другом конце диапазона. Во многих прикладных задачах измерения на одном конце диапазона бывают намного более критичными, чем на другом, и в таких случаях датчик должен быть выполнен так, чтобы критичный конец диапазона был представлен высоким значением тока, что позволяет существенно улучшить рабочие характеристики. Во многих других задачах работа будет обычно осуществляться в средней части диапазона и изобретение будет обеспечивать в этой области значительно лучшие рабочие характеристики, чем датчик, потребление тока в котором должно ограничиваться наименьшим током, который может протекать в петле.
Изобретение относится к технике измерения параметров процессов и дистанционной передачи полученных данных. Технический результат заключается в улучшении управления питанием датчика. Технический результат достигается за счет того, что интеллектуальный датчик параметров процесса может работать при среднем токе, превышающем минимальный ток, который может протекать в петле. Чтобы поддерживать среднее значение отбираемого тока ниже фактического тока петли, выполнение управляющей программы микропроцессором, входящим в состав датчика, замедляется настолько, насколько это необходимо для уменьшения потребности датчика в токе до значения, которое может быть обеспечено петлей. Замедление осуществляется средствами обнаружения дефицита тока и перевода микропроцессора в режим "сна", чтобы уменьшить потребление тока до тех пор, пока дефицит не будет ликвидирован. Переход в режим "сна" может быть отсрочен при выполнении критичных в отношении времени операций микропроцессора. 3 з.п.ф-лы, 2 ил.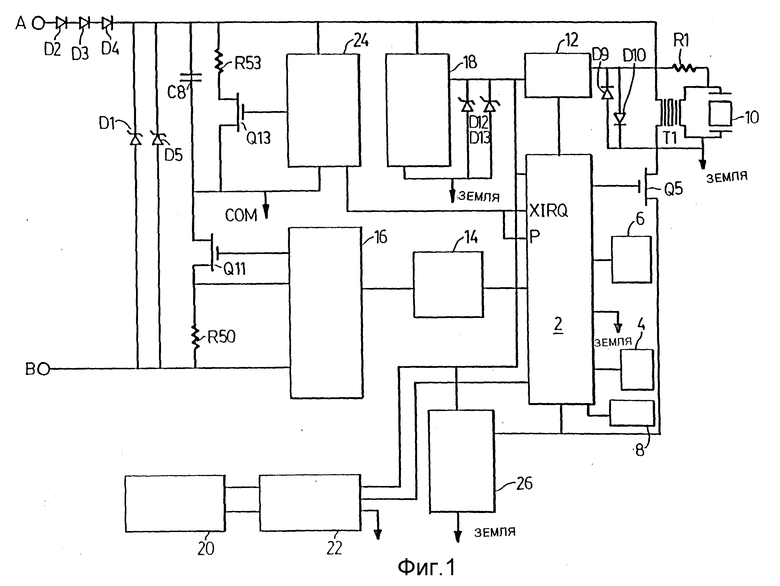
| US 4926340 A, 15.05.90 | |||
| Устройство для передачи информации | 1990 |
|
SU1791838A1 |
| Приемное устройство телеизмерительной системы | 1987 |
|
SU1425751A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| US 4823600 A, 05.11.87 | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| US 4607247 A, 12.08.85 | |||
| US 4691328 A, 12.08.85 | |||
| US 4729125 A, 12.08.85 | |||
| US 4520488 A, 02.11.81 | |||
| US 4742574 A, 03.02.86 | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| US 5083288 A, 24.12.90 | |||
| US 4494183 A, 17.06.82 | |||
| US 4831565 A, 22.04.87 | |||
| US 5267219 A, 17.07.92 | |||
| C.A.Mroz, W.Niewierski | |||
| Advansed clock controller cuts power needs side of static CMOS sistems | |||
| Electronic Design | |||
| Vol | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
