Изобретение относится к технике измерения натяжения гибкого движущегося тягового органа с помощью гидравлического средства, а именно к исследованию работы скважины, оборудованной длинноходовой насосной установкой, путем определения усилия в гибком тяговом органе в процессе откачки жидкости из скважины. Оно может применяться в нефтяной промышленности при подъеме жидкости из скважины, при исследовании нагрузки на грузоподъемном транспорте и в других отраслях народного хозяйства, где имеется необходимость контролирования нагрузки на тяговом органе визуально или с ее регистрацией,
Известно устройство для контроля натяжения движущегося гибкого тягового органа длинноходовой насосной установки, в котором опорная рама с роликами установлена по одну сторону от гибкого тягового органа, а по другую сторону - гидравлический преобразователь нагрузки в давление жидкости. Соединение этих двух узлов выполнено с помощью откидных болтов, которые позволяют также регулировать величину прогиба тягового органа над силовоспринимающим роликом гидравлического преобразователя нагрузки в давление жидкости, снабженного датчиками давления. (Авторское свидетельство СССР N 1161695, кл. E 21 B 44/00, 1985 г).
При испытании данного устройства в нефтепромысловых условиях было выявлено, что силовоспринимающий ролик гидравлического преобразователя нагрузки в давление жидкости отклоняется от главной оси корпуса указанного преобразователя. При этом отклонение этого ролика зависит от того, куда движется тяговый орган: при ходе вверх - отклонение верхнее, а при ходе вниз - отклонение вниз. Причиной такого отклонения силовоспринимающего ролика от главной оси корпуса преобразователя нагрузки в давление жидкости является то, что он закреплен только к мембране, имеющей возможность деформирования ее гофра. Из-за этого при перекосе мембраны меняется эффективная площадь действия силы мембраны, что вносит погрешность в определении нагрузки на тяговом органе. Таким образом, отсутствие в корпусе гидравлического преобразователя нагрузки в давление жидкости элемента, предотвращающего отклонение силовоспринимающего ролика от главной оси корпуса указанного преобразователя, вносит погрешность в измерение усилия на тяговом органе.
Кроме того, при испытании данного устройства было выявлено то, что из-за неточной укладки витков тягового органа в бобинной намотке, т.е. с отклонениями от вертикали на приводе установки, при разматывании тягового органа с бобины привода он смещается с середины ролика опорной рамы на его край. При таком положении тягового органа равнодействующая сила, возникающая при изменении направления тягового органа в данном устройстве, прикладывается эксцентрично к мембране и это также приводит к увеличению погрешности измерения усилия в движущемся гибком тяговом органе. Технической задачей изобретения является повышение точности контроля натяжения движущегося гибкого тягового органа длинноходовой насосной установки путем устранения отклонения силовоспринимающего ролика от главной оси корпуса гидравлического преобразователя нагрузки в давление жидкости.
Это достигается тем, что устройство для контроля натяжения движущегося гибкого тягового органа длинноходовой насосной установки содержит опорную раму с направляющими роликами по одну сторону от гибкого тягового органа и гидравлический преобразователь нагрузки в давление жидкости с силовоспринимающим роликом, установленный по другую сторону гибкого тягового органа, и они соединены между собой с помощью откидных болтов, при этом в корпусе гидравлического преобразователя установлены стержень и направляющая втулка на уровне торца стержня в направляющей втулке выполнено сквозное поперечное отверстие, а на наружной части корпуса гидравлического преобразователя нагрузки размещены датчики давления. Ролики на опорной раме имеют реборды высотой, равной или менее толщины гибкого тягового органа.
На фиг. 1 представлены опорная рама 1 с роликами 2 по одну сторону гибкого тягового органа 3, а по другую сторону - гидравлический преобразователь 4 нагрузки в давление жидкости с его силовоспринимающим роликом 5. В корпусе гидравлического преобразователя нагрузки в давление жидкости закреплены направляющая втулка 6, имеющая отверстие для дополнительного стержня 7, являющегося продолжением силовоспринимающего ролика, при этом оси стержня и направляющей втулки совпадают с главной осью корпуса вышеуказанного преобразователя, и стержень беззазорно входит в отверстие направляющей втулки.
Направляющая втулка имеет также поперечное сквозное отверстие 8, выполненное на уровне торца дополнительного стержня в направляющей втулке. Мембрана 9 имеет гофр, расположенный между внутренней стенкой корпуса гидравлического преобразователя нагрузки и наружным диаметром жесткого центра. На наружной поверхности корпуса гидравлического преобразователя нагрузки размещены датчики давления. Два ролика на опорной раме по его краям снабжены ребордами, являющимися ограничителями поперечного смещения движущегося гибкого тягового органа. Высота реборды на ролике 2 равна или менее толщины гибкого тягового органа. Такая высота реборды достаточна для удержания движущегося тягового органа в середине ролика.
Устройство работает следующим образом. После закрепления к опорной раме 1 гидравлического преобразователя 4 нагрузки в давление жидкости с помощью откидных болтов и регулировки величины прогиба гибкого тягового органа 3 над силовоспринимающим роликом 5 следят за правильным прохождением тягового органа по роликам устройства. Деформация мембраны 9 с силовопринимающим роликом 5 при беззазорном перемещении дополнительного стержня 7 в направляющей втулке 6 возможно только в одном направлении - вдоль главной оси корпуса гидравлического преобразователя нагрузки в давление жидкости соответственно предотвращается перекос силовоспринимающего ролика и при этом не будет перекашивания мембраны и изменения эффективной площади действия сил на мембране. Однако беззазорное перемещение стержня в отверстии направляющей втулки может создать эффект действия поршня в цилиндре, т.е. возникает сжатие или вакуум среды; при этом усилие для создания этого давления берется от равнодействующей силы, возникающей при изменении направления тягового органа на силовоспринимающем ролике. Поперечное отверстие 8 в направляющей втулке 6 предотвращает создание такого давления или вакуума при перемещении стержня в направляющей втулке.
Величина давления жидкости, созданная силой сжатия мембраны в корпусе гидравлического преобразователя нагрузки в давление жидкости фиксируется датчиками 10 давления и по ним судят о натяжении гибкого тягового органа при работе длинноходовой насосной установки. Предложенные дополнительные элементы в конструкции устройства для контроля натяжения гибкого тягового элемента позволяют повысить точность контроля натяжения гибкого тягового органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОДВИЖУЩИЙСЯ СКРЕБОК | 1997 |
|
RU2137909C1 |
| Устройство для контроля натяжения движущегося гибкого тягового органа длинноходовой насосной установки | 1983 |
|
SU1161695A1 |
| СКВАЖИННАЯ НАСОСНАЯ УСТАНОВКА | 1995 |
|
RU2103550C1 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 1996 |
|
RU2125184C1 |
| СОСТАВ ДЛЯ УДАЛЕНИЯ АСФАЛЬТОСМОЛОПАРАФИНОВЫХ ОТЛОЖЕНИЙ | 1996 |
|
RU2103305C1 |
| ПЕРЕПУСКНАЯ МУФТА | 1995 |
|
RU2105125C1 |
| СПОСОБ КАПИТАЛЬНОГО РЕМОНТА СКВАЖИН | 1996 |
|
RU2108444C1 |
| СПОСОБ ДОЗИРОВАНИЯ СПЕЦИАЛЬНОЙ ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2103563C1 |
| СПОСОБ ДОРАЗРАБОТКИ НЕФТЯНОЙ ЗАЛЕЖИ | 1995 |
|
RU2105135C1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ОБРАЗЦОВ-СВИДЕТЕЛЕЙ В ТРУБОПРОВОД | 1994 |
|
RU2089779C1 |
Изобретение относится к области измерений натяжений гибких движущихся тяговых органов и может применяться в нефтяной промышленности, в области эксплуатации грузоподъемных транспортных устройств и в других отраслях. Технической задачей изобретения является повышение точности измерений. Для этого силовоспринимающий ролик гидравлического преобразователя нагрузки в давление жидкости снабжен дополнительно стержнем, входящим беззазорно в отверстие направляющей втулки, закрепленной в корпусе. На уровне торца стержня на втулке выполнено сквозное поперечное отверстие, сообщающее внутреннюю полость преобразователя нагрузки в давление жидкости с отверстием втулки. Направляющие ролики на опорной раме выполнены с ребордами высотой, менее или равной толщине гибкого тягового органа. На наружной части корпуса преобразователя нагрузки в давление жидкости размещены датчики давления. Опорная рама и преобразователь нагрузки в давление жидкости установлены по разные стороны от гибкого тягового органа и соединены между собой с помощью откидных болтов. 1 ил.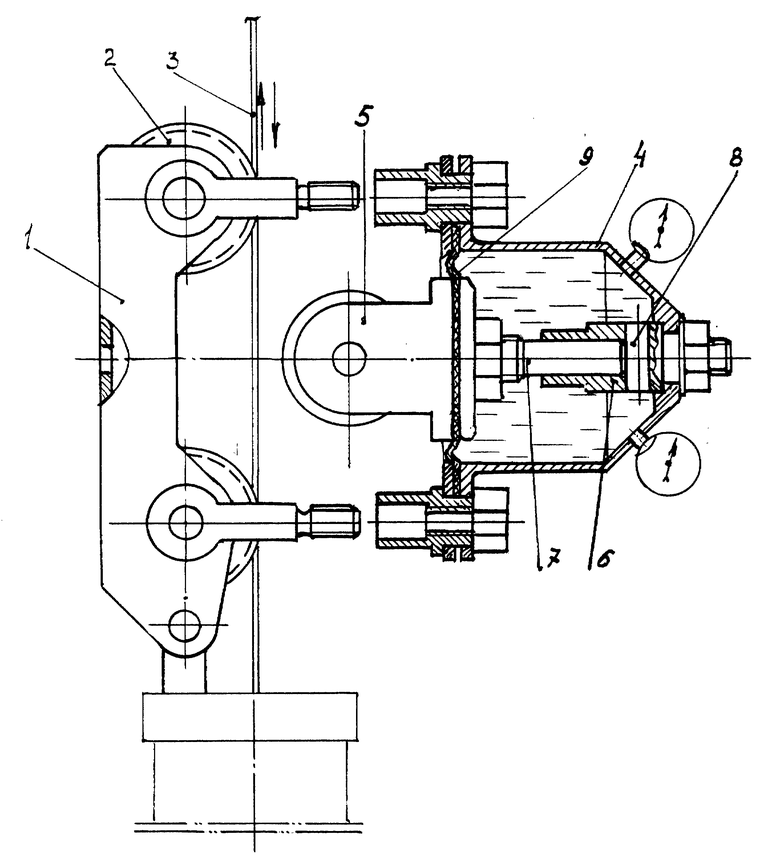
Устройство для контроля натяжения движущегося гибкого тягового органа длинноходовой насосной установки, содержащее опорную раму с направляющими роликами, установленную по одну сторону от гибкого тягового органа, и гидравлический преобразователь нагрузки в давление жидкости с силовоспринимающим роликом, установленный по другую сторону гибкого тягового органа, соединенные между собой с помощью откидных болтов, при этом на наружной части корпуса гидравлического преобразователя нагрузки в давление жидкости размещены датчики давления, отличающееся тем, что в корпусе гидравлического преобразователя нагрузки в давление жидкости дополнительно установлены стержень и направляющая втулка, оси которых совпадают с главной осью указанного корпуса, при этом стержень беззазорно входит в направляющую втулку и на уровне торца стержня в направляющей втулке выполнено сквозное поперечное отверстие, а ролики на опорной раме выполнены с ребордами высотой, равной или менее толщины гибкого тягового органа.
| Устройство для контроля натяжения движущегося гибкого тягового органа длинноходовой насосной установки | 1983 |
|
SU1161695A1 |
| Устройство для спуска и подъема скважинных приборов | 1985 |
|
SU1294984A1 |
| Моментомер для машинного ключа | 1981 |
|
SU977736A1 |
| Измеритель натяжения проволоки | 1970 |
|
SU458646A1 |
| Пружинный динамометр для определения натяжения кабеля | 1951 |
|
SU97437A1 |
| Устройство для измерения длины, скорости перемещения и натяжения кабеля | 1988 |
|
SU1596098A1 |
