Настоящее изобретение относится к области судостроения и может найти применение в качестве морского судна.
Известно американское судно на подводных крыльях типа "Джетфоил", содержащее корпус, внутри которого размещены водометные движители, приводимые в действие главным двигателем, установленным в моторном отсеке, переднее подводное крыло, установленное на поворотной стойке, заднее подводное крыло, закрепленное на двух стойках и имеющее водозаборник. Длина судна 27,4 м, ширина 9,5 м, пассажировместимость 250 чел., мощность двигателя 4850 кВт, скорость 40 уз, масса 112 т. /Р. Шенкнехт, Ю. Люш и др., Суда и судоходство будущего, пер. с немецкого, Л., Судостроение, 1981, с. 107-112, 168, рис. 82; под ред. д.т.н. В.В.Дмитриева, Морской энциклопедический словарь, т.2, СПб, Судостроение, 1993, с. 160-161/.
Недостатками известного американского судна "Джетфоил" являются кавитационное воздействие на крылья, малая грузоподъемность (не более 15%), непригодность для перевозки грузов, малая дальность плавания и большая мощность, приходящаяся на 1 т массы.
Указанные недостатки обусловлены конструкцией судна.
Известно также американское многокорпусное судно с малой площадью ватерлинии "Трисек", содержащее два сигарообразных подводных корпуса с двумя главными двигателями, установленными внутри и соединенными механически с гребными винтами, надводную грузовую платформу, на которой расположены грузовые и пассажирские помещения, две вертикальные стойки, соединяющие подводные корпуса с грузовой платформой /там же с. 102-105, рис. 76; под ред. д. т. н. В.В.Дмитриева, Морской энциклопедический словарь, т. 3, СПб, Судостроение, 1994, с. 209-210/.
Известное американское судно "Трисек", как наиболее близкое по технической сущности и достигаемому полезному результату, принято за прототип.
Недостатками известного американского судна "Трисек", принятого за прототип, являются значительная осадка, повышенный расход материалов, большое сопротивление воды, сложность погрузочно-разгрузочных работ, невозможность движения при повреждении подводных корпусов.
Указанные недостатки обусловлены большими геометрическими размерами подводных корпусов и их большой смачиваемой поверхностью, неспособностью платформы двигаться в водоизмещающем режиме, низким расположением главных двигателей.
Целью настоящего изобретения является повышение эксплуатационных качеств многокорпусного судна.
Указанная цель согласно изобретению обеспечивается тем, что грузовая платформа и два сигарообразных подводных корпуса заменены водоизмещяющим корпусом, внутри которого размещены два главных двигателя, кинематически соединенных с гребными винтами, двумя плоскими подводными корпусами, заостренными спереди и имеющими сзади гребные винты, в средней части каждого из них выполнены круглые цилиндрические ниши, открывающиеся вверх и вниз, внутрь которых вставлены, перпендикулярно продольной оси судна, цилиндры, оси которых кинематически соединены с электродвигателями, размещенными в отсеках подводных корпусов и подсоединенных к электрогенератору, установленному в водоизмещающем корпусе и кинематически связанному с главными двигателями, электронными системами стабилизации высоты и крена.
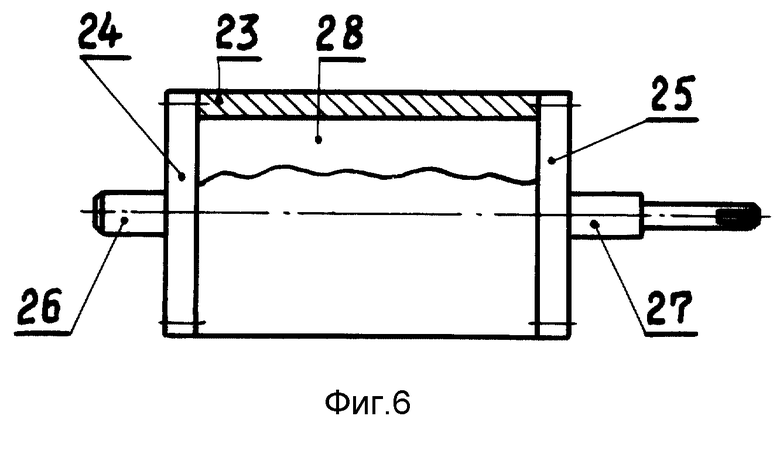
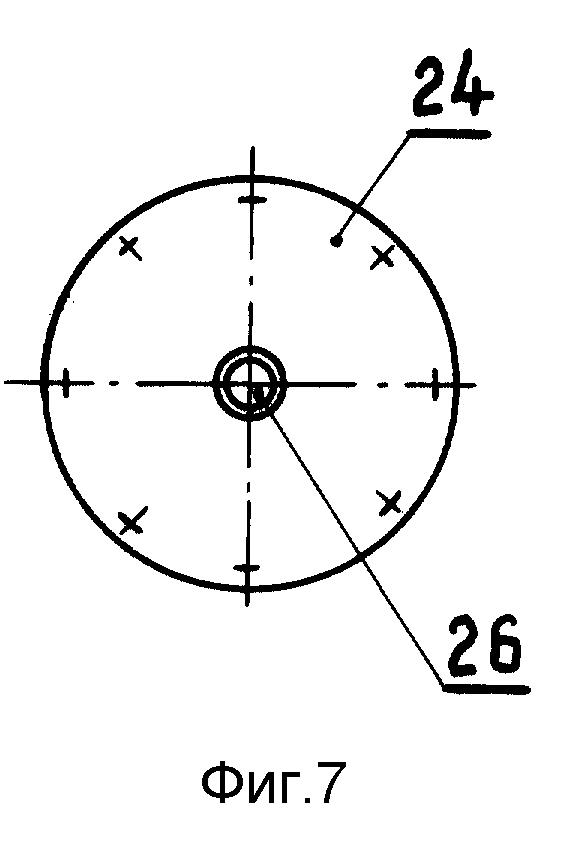
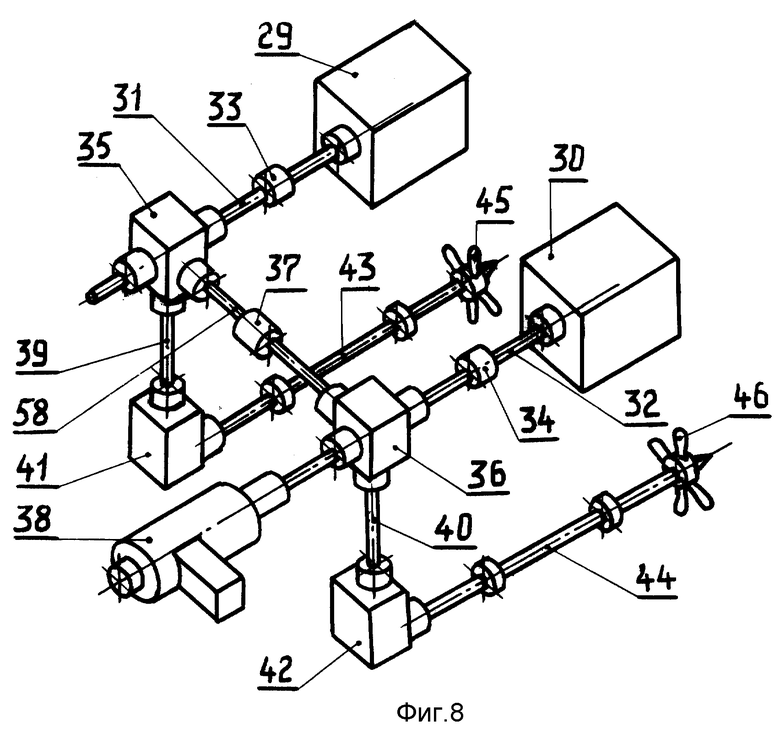
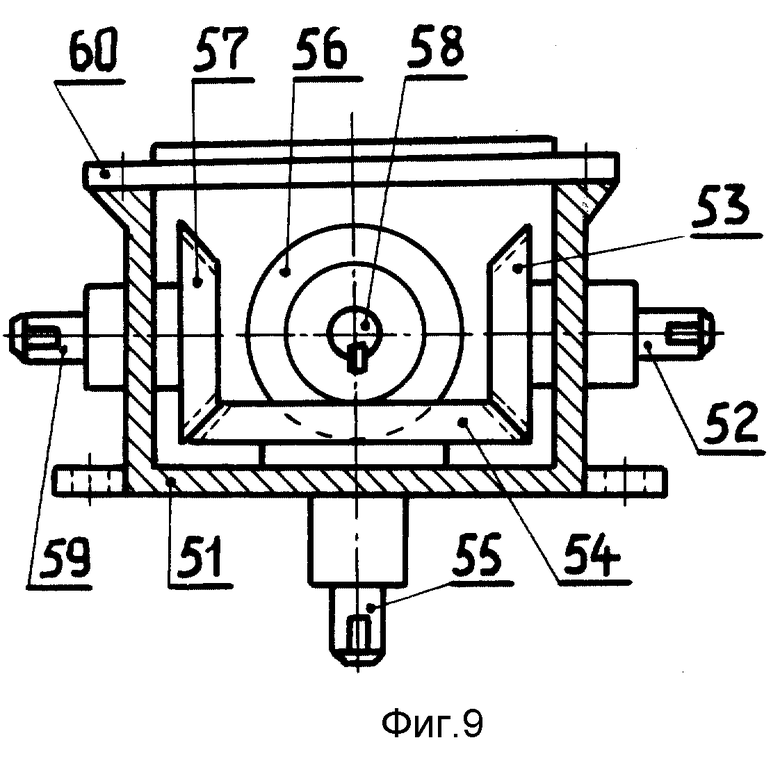
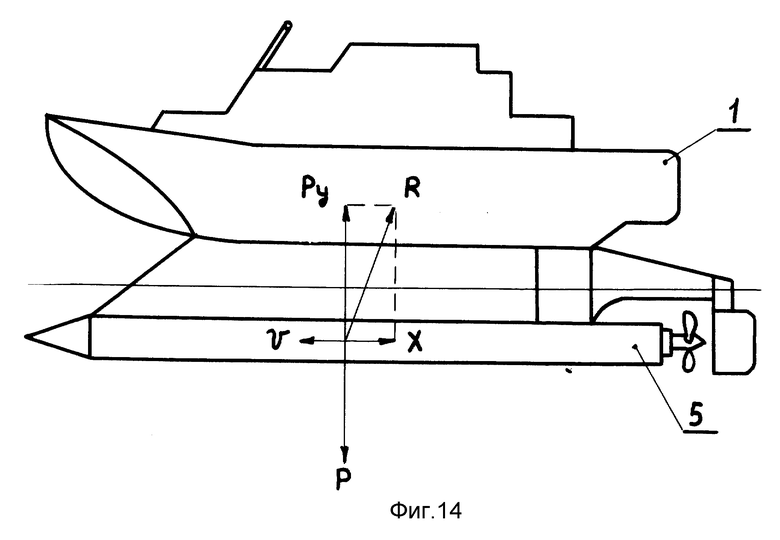
На фиг. 1 изображен общий вид предлагаемого судна; на фиг. 2 - вид на судно спереди; на фиг. 3 - вид сверху на подводный корпус; на фиг. 4 - вид подводного корпуса сборку в разрезе; на фиг. 5 - схема привода цилиндров подводных корпусов; на фиг. 6 - общий вид цилиндра; на фиг. 7 - вид на цилиндр слева; на фиг. 8 - схема силовой установки; на фиг. 9 - общий вид верхнего редуктора; на фиг. 10 - общий вид нижнего редуктора; на фиг. 11 - блок - схема стабилизации высоты корпуса судна над поверхностью воды; на фиг. 12 - блок - схема стабилизации крена и дифферента; на фиг. 13 - схема создания подъемной силы на подводном корпусе; на фиг. 14 положение корпуса судна над поверхностью воды при движении в турбодинамическом режиме.
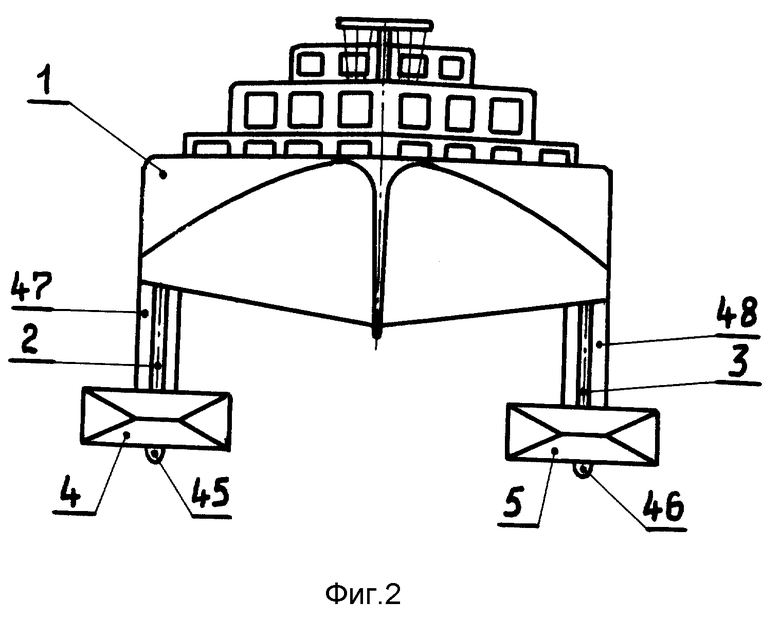
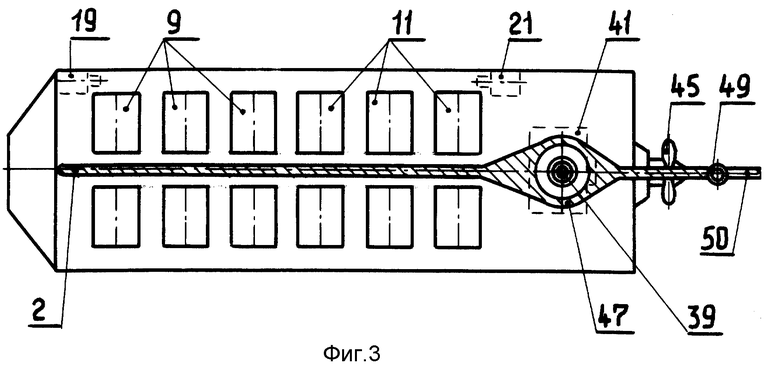
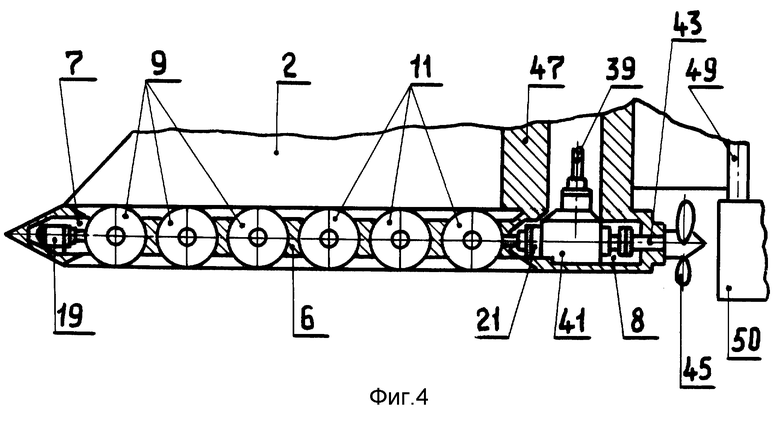
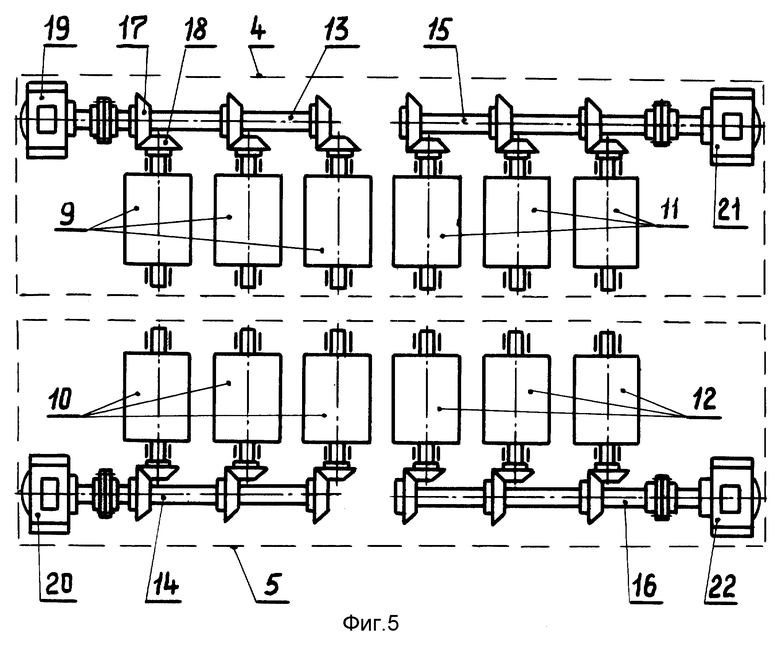
Предлагаемое многокорпусное турбодинамическое судно содержит водоизмещающий корпус 1, в котором размещены каюты пассажиров, трюмы, моторное отделение, рубка управления. Корпус имеет обводы, свойственные водоизмещающим грузовым судам, и посредством двух вертикальных стоек 2 и 3 соединен с двумя подводными корпусами 4 и 5, имеющими в плане форму параллелепипеда, заостренную спереди для лучшего обтекания водой. Оба подводных корпуса одинаковы по конструкции и каждый из них содержит раму 6, имеющую круглые полости, открывающиеся наружу в верхней и нижней частях, переднюю полость 7 и заднюю полость 8. В круглые полости подводных корпусов вставлены разделенные на четыре группы цилиндры 9, 10, 11, 12, которые посредством валов 13, 14, 15, 16 и конических шестерен 17 и 18 соединены с электродвигателями 19, 20, 21, 22, размещенными в передних и задних полостях подводных корпусов.
Каждый цилиндр содержит пустотелый корпус 23, закрытый с обеих сторон крышками 24 и 25, выполненными заодно с осями 26 и 27. Для повышения плавучести внутренние полости цилиндров заполнены пенопластом 28. Силовая установка судна представляет собой два одинаковых двигателя 29 и 30, размещенных в задней части водоизмещающего корпуса, которые посредством валов 31 и 32 с разъединительными муфтами 33 и 34 соединены с двумя верхними редукторами 35 и 36, связанными между собой поперечными валами с разъединительной муфтой 37, один из которых механически соединен с генератором электрического тока 38, который электрически соединен с электродвигателями привода цилиндров подводных корпусов. Верхние редукторы, установленные в водоизмещающем корпусе, посредством вертикальных валов 39 и 40 с соединительными муфтами и промежуточными опорами, не показанными на фигурах, соединены с нижними редукторами 41 и 42, установленными в задних полостях подводных корпусов, которые посредством валов 43 и 44 связаны с гребными винтами 45 и 46.
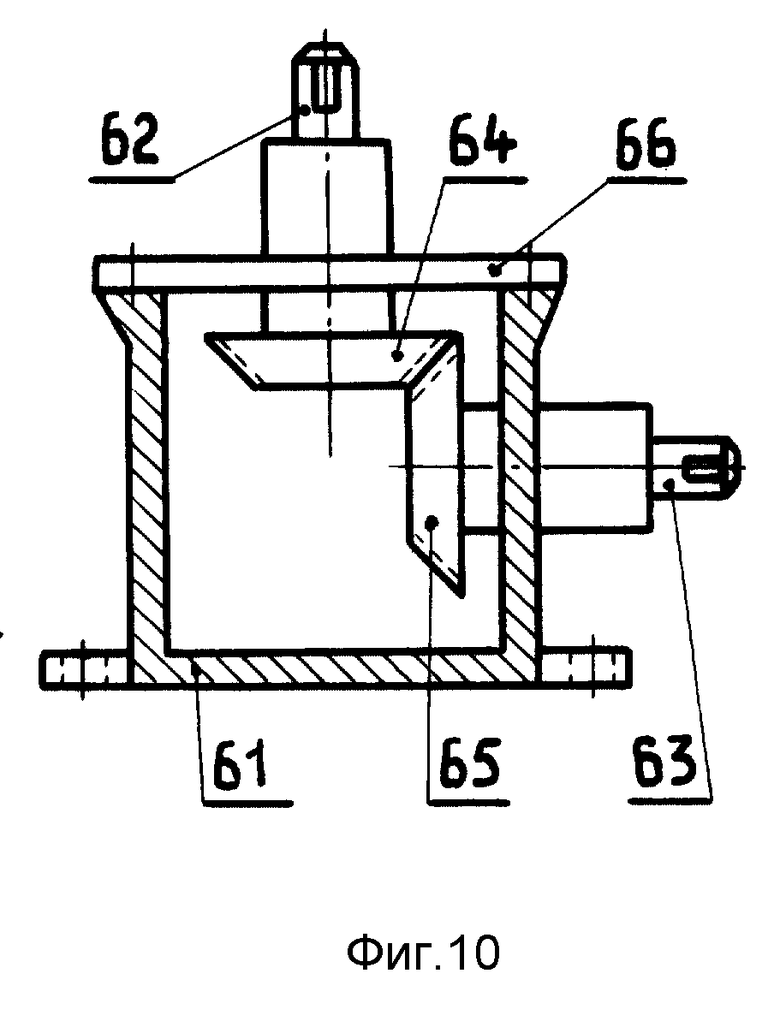
Вертикальные валы размещены в вертикальных каналах 47 и 48 вертикальных стоек, имеющих в задней части шарниры 49 с прикрепленными к ним рулями 50. Оба верхних редуктора имеют одинаковое устройство и каждый из них содержит корпус 51, в подшипниках которого закреплен ведущий вал 52 с закрепленной на нем ведущей конической шестерней 53, входящей в зацепление с шестерней 54, закрепленной на вертикальном валу 55, входящей в зацепление с шестернями 56 и 57, закрепленных соответственно на поперечном валу 58 и на ведомом валу 59 привода генератора. Корпус закрыт крышкой 60. Оба нижних редуктора одинаковы по конструкции и каждый из них содержит корпус 61, в подшипниках которого закреплены ведущий 62 и ведомый 63 валы, на которых закреплены ведущая коническая шестерня 64 и ведомая коническая шестерня 65. Корпус закрыт крышкой 66.
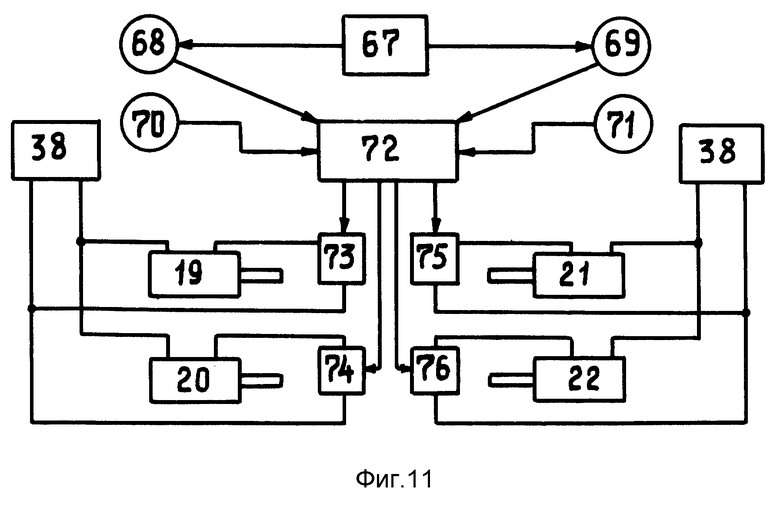
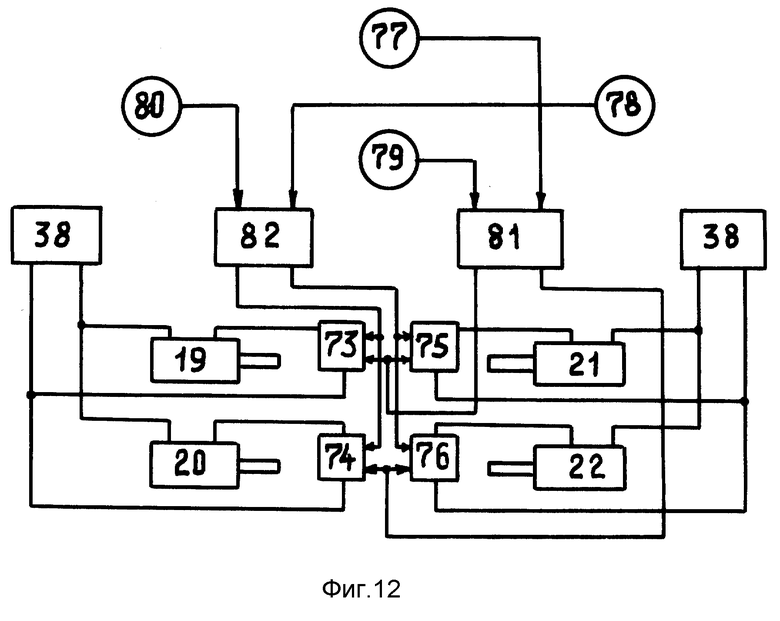
Система поддержания высоты водоизмещяющего корпуса над поверхностью воды содержит ультразвуковой генератор 67, электрически соединенный с излучателями 68 и 69, установленными в носовой и кормовой частях водоизмещающего корпуса, приемники отраженных ультразвуковых волн 70 и 71, размещенные там же и электрически соединенные с входом элекронно-вычислительной машины 72, выход которой подключен к электронным регуляторам 73, 74, 75, 76, каждый из которых включен последовательно в цепь соответствующего электродвигателя привода цилиндров подводных корпусов. Система успокоения бортовой и килевой качки содержит датчики бортовых 77 и продольных 78 ускорений, гироскопы поперечных 79 и продольных 80 колебаний, электрически подключенных к электронно-вычислительной машине поперечных колебаний 81 и электронно-вычислительной машине продольных колебаний 82, выходы которых подключены к вышеупомянутым электронным регуляторам частоты вращения электродвигателей привода цилиндров подводных корпусов.
Турбодинамическое судно функционирует следующим образом.
Предлагаемое турбодинамическое судно может перемещаться двумя способами. Первый способ - это движение в водоизмещающем режиме, когда подводные корпуса находятся на максимальном удалении от водной поверхности, а водоизмещающий корпус погружен до ватерлинии /фиг. 1/. Второй способ - это движение с динамическим поддержанием водоизмещающего корпуса над водой, а подводные корпуса при этом находятся на минимальном расстоянии от водной поверхности. /фиг. 14/. В первом случае движение турбодинамического судна определяется законами, свойственными любому водоизмещающему судну, при этом подводные корпуса 4 и 5 будут обеспечивать дополнительную устойчивость при волнении и препятствовать наклонам водоизмещающего корпуса 1 в продольном и поперечном направлениях. Движение судна осуществляется за счет двигателей 29 и 30, которые передают вращающий момент на гребные винты 45 и 46 через верхние редукторы 35 и 36, вертикальные валы 39, 40, нижние редукторы 41, 42 и валы 43 и 44.
При этом разъединительная муфта 37 должна быть выключена. Разъединительная муфта, соединяющая вал генератора электрического тока 38 с валом 59 верхнего редуктора 36 (фиг. 14) также должна быть выключена. Системы поддержания водоизмещающего корпуса над поверхностью воды и успокоения бортовой и килевой качки должны быть отключены. В случае выхода из строя одного из двигателей 29, 30 движение можно осуществлять в обоих режимах с меньшей скоростью посредством одного из них путем отключения неисправного двигателя той или иной разъединительной муфтой 33, 34 и включением разъединительной муфты 37. При этом поток мощности от исправного двигателя будет разделяться на два потока и поступать на оба гребных винта 45, 46.
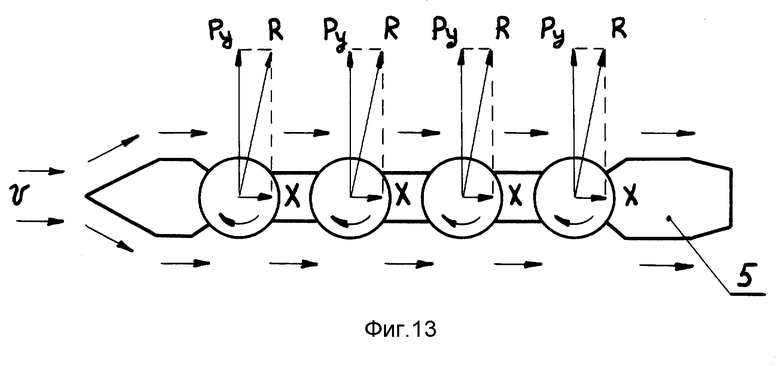
Во втором случае движение судна с поднятым над поверхностью воды водоизмещающим корпусом 1 происходит с использованием эффекта Магнуса /см. Физический энциклопедический словарь, ред. А.М. Прохоров.- М.: Советская энциклопедия, 1983, с. 209-210/. Крутящийся момент от двигателей 29, 30 передается на ведущие валы 52 и ведущие шестерни 53 верхних редукторов 35 и 36, которые приводят в движение шестерни 54, 56, валы 55, 58, разъединительная муфта отключена, далее вращающийся момент через вертикальные валы 39, 40, ведущие валы 62 ведущие шестерни 64, ведомые шестерни 65, ведомые валы 63 нижних редукторов 41, 42 и валы 43, 44 передается на гребные винты 45, 46, которые, создавая пропульсивный момент, заставляют судно двигаться вперед со скоростью V, преодолевая сопротивление воды X. Вместе с гребными винтами через ведомую шестерню 57 и ведомый вал 59 приводится во вращение генератор электрического тока 38. Вырабатываемая им электроэнергия поступает на электродвигатели 19, 20, 21, 22 подводных корпусов 4 и 5 и приводит во вращение все четыре группы цилиндров 9, 10, 11, 12. При этом происходит обтекание потоком воды, который создается движением судна, верхних и нижних поверхностей цилиндров и одновременно обтекание этих поверхностей потоком воды, создаваемым вращением цилиндров по часовой стрелке.
В результате этого скорость движения воды на верхних поверхностях цилиндров 9, 10, 11, 12 больше (направления обоих водных потоков совпадают), а скорость движения воды на нижних поверхностях цилиндров 9, 10, 11, 12 меньше (оба водных потока направлены навстречу друг другу). Вследствие разности скоростей обтекания верхних и нижних поверхностей цилиндров на их верхних частях создается разрежение, а на нижних частях - повышенное давление. Это приводит к созданию подъемной силы Py, направленной против силы тяжести P. Равнодействующая сила P направлена также вверх (фиг. 13). Под действием подъемной силы водоизмещающий корпус 1 выталкивается из воды и удерживается на некоторой высоте над поверхностью воды (фиг. 14). Величина подъемной силы зависит от скорости движения судна и частоты вращения цилиндров. Так как судно движется чаще всего с постоянной скоростью, то величину подъемной силы можно регулировать изменением частоты вращения цилиндров 9, 10, 11, 12 путем изменения частоты вращения электродвигателей 19, 20, 21, 22. Во время движения судна возможно изменение положения водоизмещающего корпуса 1 относительно водной поверхности. Поддержание указанного корпуса на заданной высоте происходит следующим образом. Ультразвуковой генератор 67 подает импульсы в излучатели 68 и 69, которые следуют с некоторыми интервалами и, отражаясь от поверхности воды, устанавливаются приемниками 70 и 71.
Электронно-вычислительная машина 72, получая данные от излучателей 68, 69 и приемников 70, 71, определяет время, прошедшее с момента посыла и получения сигнала и сравнивает его с эталонным временем, соответствующим заданной высоте. Если водоизмещающий корпус 1 находится на заданной высоте, соответствующей скорости движения судна и частоте вращения цилиндров 9, 10, 11, 12, то на выходе электронно-вычислительной машины 72 какой-либо сигнал отсутствует. Если по каким-либо причинам водоизмещающий корпус 1 опустится, то на выходе электронно-вычислительной машины 72 появится сигнал, величина, частота и амплитуда которого будут соответствовать разнице между истинным и заданным положениями водоизмещяющего корпуса относительно водной поверхности. Сигнал с выхода электронно-вычислительной машины 72 поступит на электронные регуляторы 73, 74, 75, 76. В результате сопротивление в цепи электродвигателей 19, 20, 21, 22 уменьшится, а частота вращения якорей и, следовательно, цилиндров 9, 10, 11, 12 увеличится. Под действием увеличивающейся подъемной силы водоизмещающий корпус 1 приподнимется над поверхностью воды до заданной высоты. Если высота водоизмеющающего корпуса над поверхностью воды увеличится, то величина, частота и амплитуда сигнала, подаваемого с выхода электронно-вычислительной машины 72 на электронные регуляторы 73, 74, 75, 76, изменится. Сопротивление в цепи электродвигателей 19, 20, 21, 22 возрастет, частота вращения якорей и соответственно цилиндров 9, 10, 11, 12 уменьшится. Уменьшившаяся подъемная сила заставит водоизмещающий корпус 1 опустится до заданной высоты.
При движении судна в режиме динамического поддержания водоизмещающего корпуса над поверхностью воды возможны отклонения последнего от горизонтального положения в поперечной и продольной плоскостях. При отклонении водоизмещяющего корпуса 1 от горизонтального положения на правый борт в датчике гироскопа 79 и датчике бортовых ускорений 77 возникают электрические сигналы, соответствующие величине и скорости этого отклонения. Электронно-вычислительная машина 81 анализирует полученные сигналы и выдает на выходе сигнал определенной величины, частоты и амплитуды, который поступает на электронные регуляторы 73 и 75. В результате частота вращения якорей электродвигателей 19 и 21 подводного корпуса 4 увеличится вследствие уменьшения сопротивления в цепи этих электродвигателей. Цилиндры 9 и 11 станут вращаться быстрее и подъемная сила подводного корпуса 4 возрастет на необходимую величину. Под действием возросшей подъемной силы по правому борту водоизмещяющий корпус 1 повернется и займет горизонтальное положение.
При отклонении водоизмещающего корпуса 1 от горизонтального положения на левый борт с датчиков 79 и 77 станут поступать сигналы, соответствующие этому отклонению, на вход электронно-вычислительной машины 81, с выхода которой сигнал станет подаваться на электронные регуляторы 74 и 76. Сопротивление в цепи электродвигателей 20 и 22 уменьшится, а частота вращения якорей этих электродвигателей и цилиндров 10, 12 подводного корпуса 5 увеличится, что приведет к увеличению подъемной силы левого борта и возвращению водоизмещающего корпуса 1 в исходное горизонтальное положение. После прекращения поступления сигналов с датчиков 79 и 77 подъемная сила по левому и правому бортам станет одинаковой. В момент наклона вниз носовой части водоизмещающего корпуса 1 с датчика гироскопа 80 и датчика ускорений 78 на вход электронно-вычислительной машины 82 поступают сигналы, соответствующие величине и скорости этого наклона. На выходе электронно-вычислительной машины 82 появится соответствующий сигнал, который поступит на электронные регуляторы 73 и 74.
В результате сопротивление в цепях электродвигателей 19 и 20 уменьшится, а частота вращения якорей этих электродвигателей и цилиндров 9, 10 увеличится. Вместе с ними увеличится подъемная сила в носовой части подводных корпусов 4 и 5, под действием которой приподнимается носовая часть водоизмещающего корпуса 1 и он займет горизонтальное положение. Внезапный наклон вниз задней части водоизмещяющего корпуса вызовет появление соответствующих сигналов от датчиков 80 и 78 на входе электронно-вычислительной машины 82 и поступление с ее выхода сигнала на электронные регуляторы 75 и 76, которые уменьшат сопротивление в цепях электродвигателей 21 и 22, что приведет к увеличению частоты вращения якорей этих электродвигателей и цилиндров 11 и 12. Подъемная сила в задней части подводных корпусов 4 и 5 увеличится и задняя часть водоизмещающего корпуса 1 приподнимется над водой до горизонтального положения. Таким образом обе системы, воздействуя независимо друг от друга на одни и те же электронные регуляторы и изменяя частоту вращения тех или иных групп цилиндров, изменяют величину подъемной силы в той или иной части судна, обеспечивая постоянную высоту водоизмещающего корпуса над поверхностью воды и его горизонтальное положение на волнении.
Турбодинамическое судно может быть использовано для перевозки морским путем различных грузов.
Положительный эффект изобретения: более высокая безопасность, при повреждении подводных корпусов судно останется на плаву, более высокая устойчивость, исключается опрокидывание судна при проведении погрузочно-разгрузочных работ в моменты снятия больших партий груза с того или иного борта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОДИНАМИЧЕСКОЕ СУДНО | 2012 |
|
RU2495782C1 |
| ПОДВОДНЫЙ АППАРАТ С ЕДИНЫМ ДВИГАТЕЛЕМ ДЛЯ НАДВОДНОГО И ПОДВОДНОГО ХОДА | 2001 |
|
RU2197408C2 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2000 |
|
RU2190546C2 |
| ГИДРОЦИКЛ | 2014 |
|
RU2537371C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 2006 |
|
RU2301750C1 |
| ПОДВОДНЫЙ АППАРАТ | 2013 |
|
RU2515815C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 1999 |
|
RU2149109C1 |
| Аэродинамическое судно | 2015 |
|
RU2609577C1 |
| ГИДРОЦИКЛ | 2014 |
|
RU2545161C1 |
| Аэродинамическое судно | 2019 |
|
RU2710040C1 |
Изобретение относится к судостроению и может быть использовано при строительстве тримаранных судов с малой площадью ватерлинии. Судно содержит два подводных корпуса, соединенных с надводным корпусом. Надводный корпус выполнен водоизмещающим с обводами грузового судна. Подводные корпуса выполнены по форме заселенных спереди параллелепипедов. Подводные корпуса имеют круглые цилиндрические полости, ориентированные перпендикулярно продольной оси и открывающиеся наружу в верхней и нижней частях. Внутрь этих полостей вставлены цилиндры с возможностью вращения вокруг продольных осей, кинематически связанных с электродвигателями, которые установлены внутри подводных корпусов и подключены к генератору электрического тока, находящемуся в надводном корпусе и приводимому в движение главным двигателем. Количество цилиндров не ограничено. Каждый из них может иметь пустотелый заполненный пенопластом корпус, закрытый с обеих сторон крышками, имеющими оси. Турбодинамическое судно может иметь систему поддержания заданной высоты надводного корпуса над поверхностью воды и систему успокоения бортовой и килевой качки. Судно способно эксплуатироваться в обычном водоизмещающем режиме и в режиме динамического поддержания его с помощью эффекта Магнуса, возникающего на вращающихся цилиндрах в подводных корпусах судна. Технический результат реализации изобретения заключается в повышении эксплуатационных качеств многокорпусного судна. 3 з.п.ф-лы, 14 ил.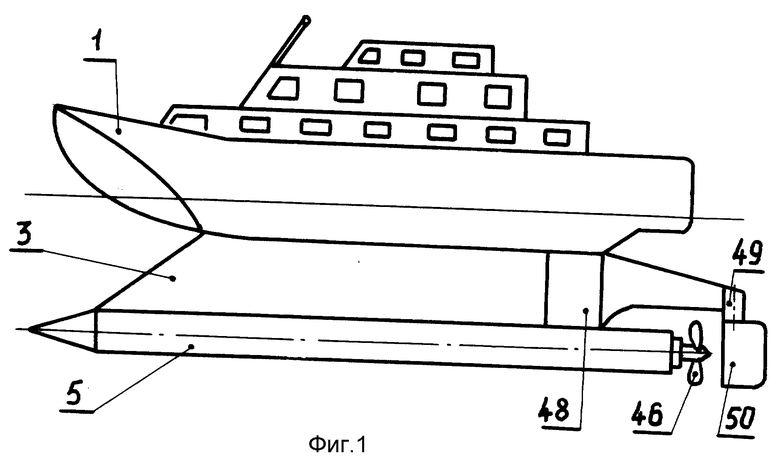
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Морской энциклопедический словарь | |||
| /Под ред | |||
| д.т.н | |||
| В.В.Дмитриева | |||
| - С.-П., Судостроение, 199, с | |||
| Парный рычажный домкрат | 1919 |
|
SU209A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шенкнехт Р., Люш Ю., Шельцель М | |||
| и др | |||
| Суда и судоходство будущего: Перевод с немецкого | |||
| - Л.: Судостроение, 1981, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
