Изобретение относится к ультразвуковой технике и может быть использовано для измерения и контроля уровня жидкости или сыпучих веществ в емкостях методом ультразвуковой локации без непосредственного контакта акустического датчика с контролируемым веществом.
Известны способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления по авт. свид. СССР N 765659.
Способ основан на одновременном синхронизированном излучении ультразвуковых рабочих импульсов и реперных импульсов, проходящих фиксированное расстояние, их приеме, усилении, разделении во времени и формировании реперного прямоугольного импульса, передний фронт которого соответствует моменту излучения ультразвуковых импульсов, а задний - моменту прохода реперного ультразвукового импульса. При этом реперный прямоугольный импульс сравнивают с временным интервалом импульсов, полученных при делении частоты синхронизирующих импульсов, и вырабатывают сигнал ошибки, которым изменяют частоту синхронизирующих импульсов и период следования рабочих и реперных ультразвуковых импульсов, причем отношение этого периода к длительности реперного прямоугольного импульса оставляют постоянным.
Устройство для осуществления этого способа содержит синхронизатор, делитель частоты, генератор зондирующих ультразвуковых импульсов, усилитель, измерительный триггер, индикатор, схему разделения реперного и измерительного сигналов, триггер реперного интервала, схему сравнения временных интервалов, схему сигнала ошибки а также акустический датчик, включающий излучатель, приемник и установленный на датчике реперный отражатель.
Недостатком этого способа и устройства для его осуществления является необходимость изменения частоты синхроимульсов, что сложно выполнить с высокой степенью стабильности частоты. Это приводит к появлению дополнительной погрешности.
Известен способ компенсации погрешностей акустических локационных уровнемеров по авт. свид. СССР N 1529047, выбранный в качестве прототипа. Этот способ заключается в формировании синхроимульсов, одновременном излучении ультразвуковых рабочих и реперных импульсов, их приеме, усилении и разделении во времени, преобразовании реперного временного интервала в m-разрядный код путем подсчета числа синхроимпульсов с момента начала излучения до момента прихода переднего фронта реперного импульса, запоминании числа, соответствующего скорости ультразвука, формировании последовательности счетных импульсов, в которой фиксированному расстоянию соответствует фиксированное число импульсов, а расстояние определяется путем определения числа счетных импульсов с момента начала излучения до момента прихода переднего фронта измерительного импульса.
Этот способ имеет следующие недостатки. При изменении скорости звука число счетных импульсов на реперном интервале поддерживается постоянным. Неравномерность временных интервалов между реперными импульсами может приводить к существенным погрешностям в определении уровня жидкости. Например, пусть число разрядов m=4, количество импульсов на реперном расстоянии N=10000. Если скорость звука изменилась так, что в регистр цифрового преобразователя реперных интервалов (ЦПРИ) записывается число 19999, то схема пересчета пропустит сначала 9999 импульсов тактовой частоты, а затем выдаст на делитель 10000 импульсов (если в этот период не поступит измерительный импульс). В начале временного интервала, следующего за реперным, ошибка измерения уровня может составлять половину реперного расстояния; минимальная ошибка будет лишь в конце данного временного интервала. Кроме того, изменение кода реперного интервала происходит в момент измерения уровня в данной посылке и подвержено влиянию случайных ошибок.
Известно устройство компенсации погрешностей акустических локационных уровнемеров по авт.св. СССР N 1529047, избранное в качестве прототипа. Устройство содержит синхронизатор, цифровой преобразователь реперного временного интервала, блок формирования счетных импульсов, делитель частоты, блок цифровой индикации, генератор зондирующих ультразвуковых импульсов, усилитель, разделитель реперного и измерительного сигналов, а также акустический датчик, включающий излучатель, приемник и реперный отражатель, установленный на фиксированном расстоянии от него выше максимального уровня жидкости, находящейся в емкости.
Цифровой преобразователь реперного временного выполнен в виде m-разрядного декадного счетчика, информационные выходы каждой декады которого соединены со входом соответствующих разрядов m-разрядного регистра памяти.
Недостатком этого устройства является недостаточная точность измерения уровня.
Целью изобретения является снижение погрешности и повышение стабильности измерений в турбулентной диспергирующей газовой среде.
Поставленная цель достигается тем, что в заявляемом способе при цифровом преобразовании реперного с его кодом суммируют корректирующий код, для стабилизации количества счетных импульсов на реперном интервале полученный суммарный код запоминают и усредняют по числу фактически принятых и превысивших заданный порог ультразвуковых импульсов, в процессе формирования счетчик импульсов частоту их следования устанавливают в зависимости от усредненного кода реперного интервала, а код измерительного интервала усредняют по числу фактически принятых и превысивших заданный порог ультразвуковых импульсов независимо от числа принятых реперных импульсов.
Поставленная цель достигается также тем, что в устройство введены корректирующая матрица переключателей, подключенная ко входам загрузки цифрового преобразователя реперного интервала, блок стабилизации количества счетных импульсов, включенный между выходом цифрового преобразователя реперного интервала и выходом блока формирования счетных импульсов, выполненный в виде сумматора - усреднителя кода, подлежащего преобразованию в частоту в блоке формирования счетных импульсов, сумматор - усреднитель кода, включенный между выходом цифрового преобразователя измерительного интервала и входом блока цифровой индикации расстояния от акустического датчика до измеряемого уровня, при этом тактирующие входы обоих сумматоров - усреднителей кода соединены с соответствующими выходами синхронизатора.
Суть заявляемого способа заключается в усреднении отсчетов реперного и измеряемого расстояний, т. е. результат оценивается как среднее арифметическое по N независимым отсчетом. Кроме того, производится коррекция систематической ошибки измерения. Усреднение результатов и коррекция ошибок способствуют повышению точности измерений, когда условия эксплуатации уровнемера не позволяют выполнять одиночные измерения с высокой точностью. Такие условия имеют место в парогазовой среде со 100%-ой влажностью при постоянной турбулентности газа и больших градиентах его температуры.
Введение в заявляемое устройство новых блоков с соответствующими связями позволяет по сравнению с аналогичными устройствами и прототипом получить новое качество, а именно, более высокую стабильность и достаточно низкую погрешность измерений уровня жидкости в турбулентной диспергирующей газовой среде за счет усреднения кода реперного интервала и независимо от него кода измеряемого расстояния по N циклам излучения ультразвукового импульса. Предлагаемое устройство позволяет стабилизовать интервалы между счетными импульсами, что обеспечивает равномерность их поступления на вход счетчика и снижение аппаратурной ошибки. Независимое усреднение отсчетов импульсов, соответствующих реперному и измеряемому интервалам, по N циклам излучения и приема обеспечивает уменьшение влияния случайных погрешностей и стабилизацию измерений. Введение неоперативной коррекции цифрового кода позволяет компенсировать систематические ошибки измерений.
Способ компенсации погрешностей акустических локационных уровнемеров, в котором осуществляют излучение и прием ультразвуковых импульсов, включает формирование реперного и измерительного временных интервалов, усиление принятых импульсов и их разделение, цифровое преобразование реперного интервала с помощью синхроимпульсов, формирование счетных импульсов, цифровое преобразование измерительного интервала с помощью счетных импульсов и цифровую индикацию расстояния от акустического датчика до измеряемого уровня, заключающийся в том, что для исключения случайных ошибок измерения стабилизируют количество счетных импульсов на реперном интервале, а для исключения систематических ошибок измерения при цифровом преобразовании реперного интервала с его кодом суммируют корректирующий код, для стабилизации количества счетных импульсов на реперном интервале полученный суммарный код запоминают и усредняют по числу фактически принятых и превысивших заданный порог ультразвуковых импульсов, в процессе формирования счетных импульсов частоту их следования устанавливают в зависимости от усредненного кода реперного интервала, а код измерительного интервала усредняют по числу фактически принятых и превысивших заданный порог ультразвуковых импульсов независимо от числа принятых реперных импульсов.
На фиг. 1 представлена схема устройства компенсации погрешностей акустических локационных уровнемеров;
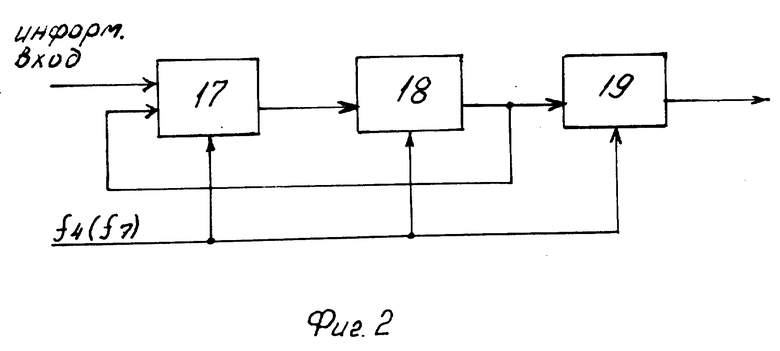
на фиг. 2 - схема сумматора-усреднителя;
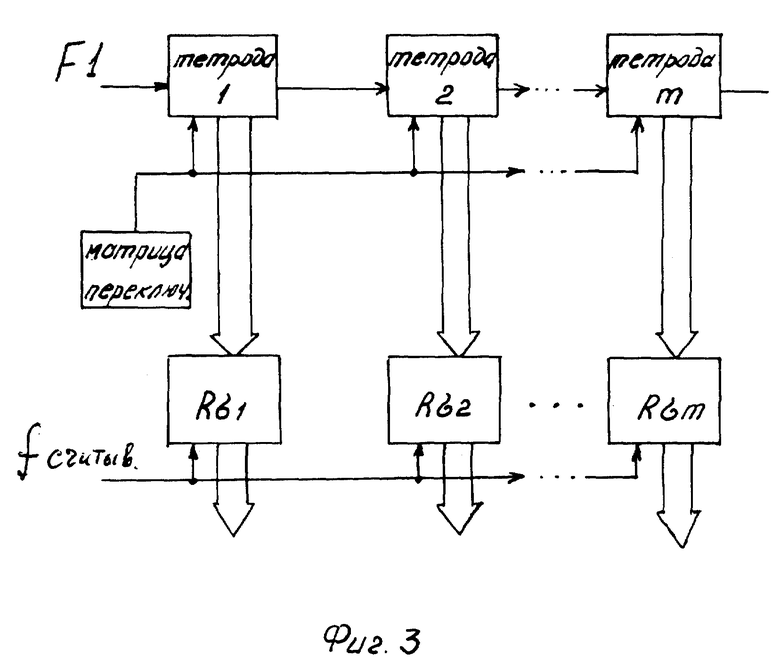
на фиг. 3 - схема цифрового преобразователя реперного временного интервала.
Устройство компенсации погрешностей акустических локационных уровнемеров содержит синхронизатор 1, цифровой преобразователь реперного временного интервала (ЦПРИ) 2, первый сумматор-усреднитель 3, преобразователь код-чаcтота 4, цифровой преобразователь измерительных временных интервалов (ЦПРИ) 5, второй сумматор-усреднитель 6, индикатор 7, генератор зондирующих импульсов (ГЗИ) 8, излучатель 9 и приемник ультразвуковых импульсов, образующие акустический датчик 11, реперный отражатель 12, расположенный на фиксированном расстоянии от акустического датчика 11, поверхность жидкости 13, расстояние до которой измеряется в резервуаре 14, усилитель с пороговым устройством 15 и разделитель 16 по времени прихода реперного и измерительного импульсов.
Выход синхронизатора 1 соединен с частотами входами ЦПРИ 2, сумматоров-усреднителей 3 и 6, преобразователя код-частота 4, ЦПИИ 5, индикатора 7, генератора зондирующих импульсов 8 и разделителя 16. Цифровой преобразователь реперного временного интервала 2 последовательно соединен с сумматором-усреднителем 3, преобразователем код-частота 4, цифровым преобразователем измерительных временных интервалов 5, сумматором-усреднителем 6 и индикатором 7. Выход усилителя 15 соединен со входом разделителя 16, первый выход которого соединен со вторым входом ЦПРИ 2, а второй выход - с третьим входом ЦПИИ 5. Выход генератора зондирующих импульсов 8 соединен со входом излучателя 9 акустического датчика 11, выход приемника 10 которого соединен со входом усилителя 15.
Сумматоры-усреднители 3 и 6 (фиг. 2) выполнены по идентичной схеме и содержат последовательно соединенные арифметико-логическое устройство (АЛУ) 17 и два регистра 18 и 19, информационный выход регистра 18 соединен со вторым входом АЛУ 17, а информационный выход регистра 19 является выходом сумматора-усреднителя.
Цифровой преобразователь реперного временного интервала 2 (фиг. 3) выполнен в виде m-разрядного счетчика, информационные выходы которого соединены с входами соответствующих разрядов m-разрядного регистра памяти. Для коррекции систематических ошибок измерений преобразователь содержит матрицу переключателей, соединенную со входами загрузки счетчиков, что позволяет записывать в счетчик заданное двоичное число, которое суммируется с кодом реперного интервала.
Цифровой преобразователь измерительных временных интервалов 5 выполнен аналогично преобразователю 2.
Синхронизатор 1 представляет собой тактовый кварцевый генератор с набором делителей частоты. От вырабатывает тактовые прямоугольные импульсы с постоянным стабилизированным периодом следования t = 1/f, который выбирается таким образом, чтобы при максимальной заданной скорости звука в газовой среде расстояние между тактовыми импульсами h=Cmax•t/2 было бы равно требуемой дискретности измерений реперного расстояния и измеряемого уровня жидкости. Кроме того, синхронизатор 1 содержит делители частоты для формирования необходимых служебных импульсов с частотами следования f1,...f7.
Устройство работает следующим образом.
Генератор зондирующих импульсов 8 по сигналу синхронизатора 1 вырабатывает сигнал, поступающий на излучатель 9, который возбуждает в газовой среде ультразвуковые колебания. Ультразвуковой импульс, распространяясь со скоростью, зависящей от состояния газовой среды (состав, температура, давление, однородность), отражается от реперного отражателя 12 и от границы раздела газовой среды и жидкости или сыпучего вещества (от измеряемого уровня) 13. Отраженные от реперного отражателя и от границы раздела сред соответственно реперный и измерительный сигналы принимаются приемником 10 акустического датчика 11 и поступает на вход усилителя с пороговым устройством 15. На время воздействия реверберации усилитель 15 бланкируется служебным импульсом с частотой следования 12, поступающим от синхронизатора.
После усиления сигналы поступают на разделитель 16 реперного и измерительного сигналов. В разделителе 16 сигналы преобразуются из радиоимпульсов в видеоимпульсы, усиливаются, нормируются и стробируются с использованием стробов реперного и измерительного импульсов, которые формируются синхронизатором 1 (частота f3). В результате с первого выхода разделителя 16 снимается реперный импульс, а со второго - измерительный.
Цифровой преобразователь реперного измерительного интервала 2 осуществляют преобразование реперного временного интервала tp =21p/C, где 1p - расстояние до реперного отражателя, C - скорость звука в среде, в m-разрядный цифровой код Np.
На выходе сумматора-усреднителя 3 формируется усредненный m-разрядный код реперного интервала. Число усреднений в сумматоре равно N и определяется по фактическому количеству принятых приемником 10 и превысивших заданный порог реперный сигналов.
На выходе преобразователя код-частота 4 генерируются импульсы с частотой F2, пропорциональной усредненному коду реперного интервала. Эти импульсы являются счетными для цифрового преобразователя измерительных временных интервалов 5. Код измерительного интервала с выхода ЦПИИ 5 поступает на вход второго сумматора-усреднителя 6, который работает аналогично первому сумматору-усреднителю 3. Число циклов усреднения в сумматоре-усреднителе 6 также равно N, но это число равно фактическому количеству принятых приемников 10 и превысивших порог измерительных сигналов.
С выхода сумматора-усреднителя 6 информация в виде двоичного кода поступает на вход индикатора 7, который преобразует двоичный код сумматора 6 в код, например, семисегментного элемента индикации. На световом табло индикатора по желанию оператора высвечивается десятичное число, равное расстоянию от акустического датчика до поверхности жидкости (сыпучего вещества) или глубина слоя жидкости (сыпучего вещества) при известном расстоянии от датчика 11 до дна резервуара 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1985 |
|
SU1529047A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2396521C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2008 |
|
RU2384822C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2009 |
|
RU2406979C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО УРОВНЕМЕРА | 2011 |
|
RU2470267C1 |
| УРОВНЕМЕР | 1992 |
|
RU2010182C1 |
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1978 |
|
SU765659A1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТИ ИЗМЕРЕНИЯ УЛЬТРАЗВУКОВОГО ЛОКАТОРА | 2013 |
|
RU2544310C1 |
| СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ТЕКУЧЕЙ СРЕДЫ | 1994 |
|
RU2079813C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЗОНАНСНЫХ ЧАСТОТ | 1992 |
|
RU2049329C1 |
Изобретение относится к ультразвуковой технике. Предполагается излучение и прием ультразвуковых импульсов, формирование реперного и измерительного временных интервалов, их цифровое преобразование соответственно с помощью синхро- и счетных импульсов, индикация расстояния от акустического датчика до измеряемого уровня. Для исключения случайных ошибок стабилизируют количество счетных импульсов на реперном интервале, а для исключения систематического ошибок при цифровом преобразований реперного интервала с его кодом суммируют корректирующий код. Суммарный код запоминают и усредняют по числу фактически принятых и превысивших заданный порог ультразвуковых импульсов. Частоту счетных импульсов устанавливают в зависимости от усредненного кода. Код измерительного интервала усредняют независимо от числа принятых реперных импульсов. В устройстве к входам загрузки цифрового преобразователи реперного интервала подключена корректирующая матрица переключателей. Блок стабилизации количества счетных импульсов выполнен в виде сумматора-усреднителя кода. Между выходом цифрового преобразователя измерительного интервала и входом блока цифровой индикации расстояния включен дополнительный сумматор-усреднитель кода. Данное техническое решение обеспечивает снижение погрешности и повышение стабильности измерений. 2 с.п. ф-лы, 3 ил.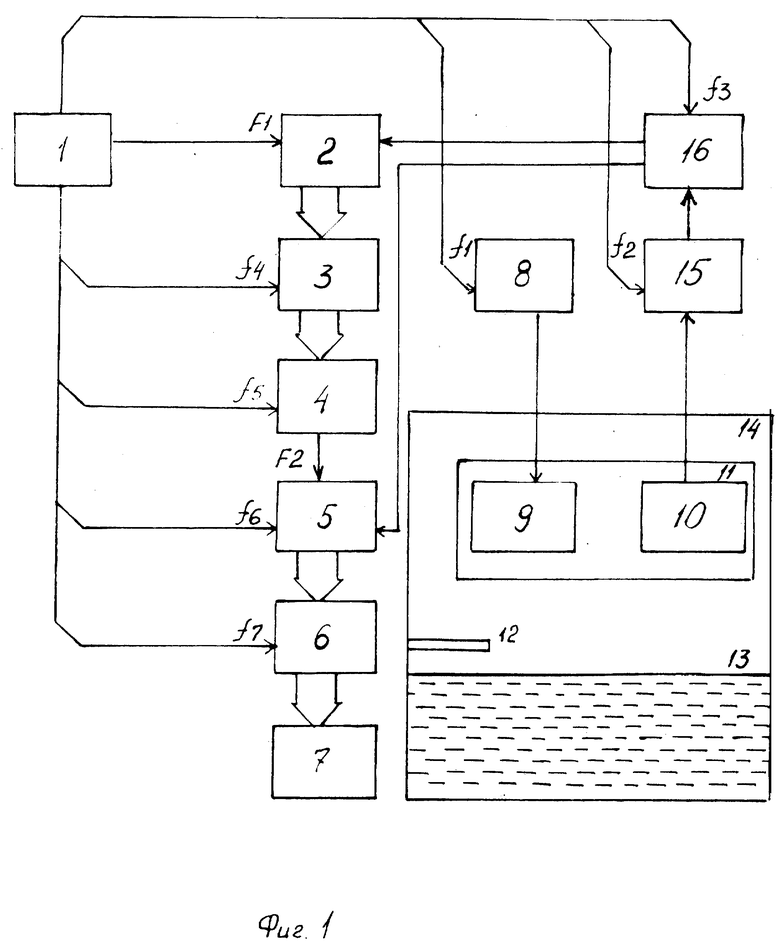
| Способ компенсации погрешностей акустических локационных уровнемеров и устройство для его осуществления | 1985 |
|
SU1529047A1 |
| Цифровой акустический уровнемер | 1977 |
|
SU690310A1 |
