Изобретение относится к конвейеростроению, а именно к наклонным ленточным конвейерам, оснащенным устройством для улавливания оторвавшейся ленты, и может быть использовано на подземных конвейерах на горных предприятиях и наклонных конвейерах дробильно-сортировочных заводов и обогатительных фабрик.
Известны наклонные ленточные конвейеры, оснащенные улавливающими устройствами различного типа [1].
Недостатком известных конвейеров является значительный обратный ход ленты до ее заторможивания улавливающим устройством.
Наиболее близким к заявляемому является наклонный ленточный конвейер, включающий бесконечно замкнутую на концевых барабанах гибкую ленту, грузонесущая и холостая ветви которой опираются на соответствующие роликоопоры, закрепленные на раме конвейера, улавливающее устройство, состоящее из шарнирно закрепленного на раме конвейера сдвоенного двуплечего рычага с поперечными профилированными рабочими органами с возможностью их взаимодействия с конвейерной лентой по широте при ее обрыве, а также датчик обрыва ленты, замковое приспособление и привод двуплечего рычага в виде противовеса [2].
Однако недостатками известного конвейера являются ненадежность улавливания оторвавшейся ленты из-за малой величины натяжения ленты со стороны ее обрыва, что требует установки вспомогательного затормаживающего приспособления, увеличения высоты конвейера, значительный обратный ход улавливаемой ленты, невозможность одновременного улавливания грузонесущей и холостой ветвей ленты [1].
Задачами изобретения являются повышение надежности улавливания ленты при ее обрыве, уменьшение обратного хода ленты, возможность одновременного улавливания обеих ветвей ленты.
Технический результат достигается за счет того, что наклонный ленточный конвейер, включающий бесконечно замкнутую на концевых барабанах гибкую ленту, грузонесущая и холостая ветви которой опираются на закрепленные на раме конвейера роликоопоры, улавливающее устройство, состоящее из шарнирно закрепленного на раме сдвоенного двуплечего рычага, оснащенного рабочим органом с возможностью его взаимодействия с конвейерной лентой при повороте рычага, датчик отрыва ленты, замковое приспособление, привод двуплечего рычага, снабжен дополнительными двуплечими рычагами, установленными по тракту конвейера и кинематически связанными между собой гибким элементом, соединенным с приводом, при этом двуплечие рычаги выполнены трубчатыми и П-образного профиля с возможностью подъема грузонесущей ветви ленты поперечинами рычагов при их повороте и фиксации в этом положении упорами, а гибкий элемент соединен с нижними свободными концами рычагов, причем часть рычагов снабжена дополнительными поперечинами, размещенными под холостой ветвью ленты с возможностью взаимодействия с ней и закрепленными на верхних плечах рычагов посредством кронштейнов.
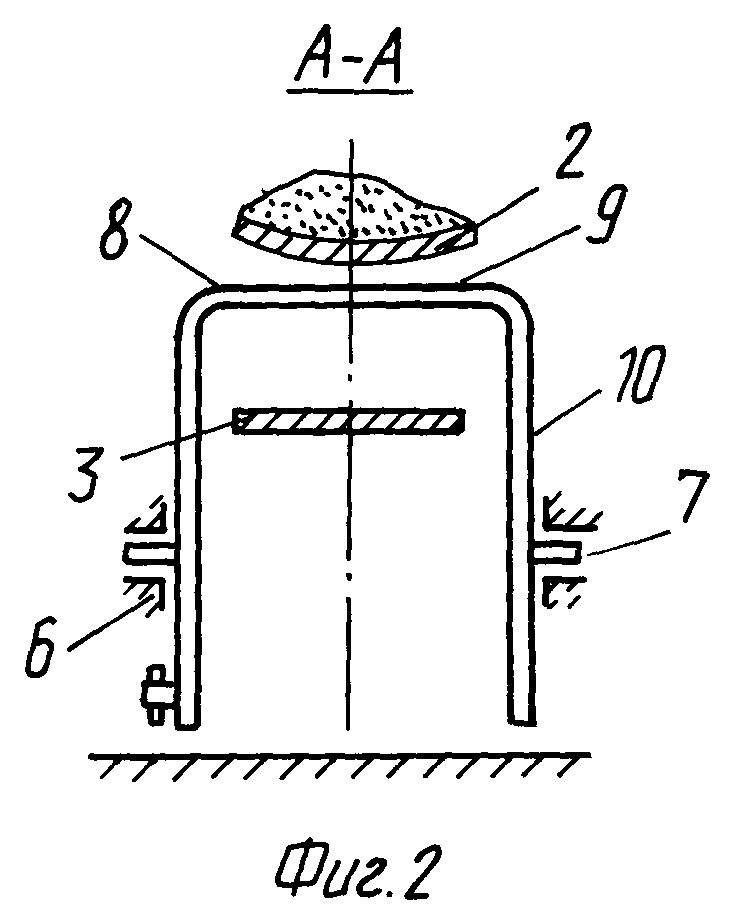
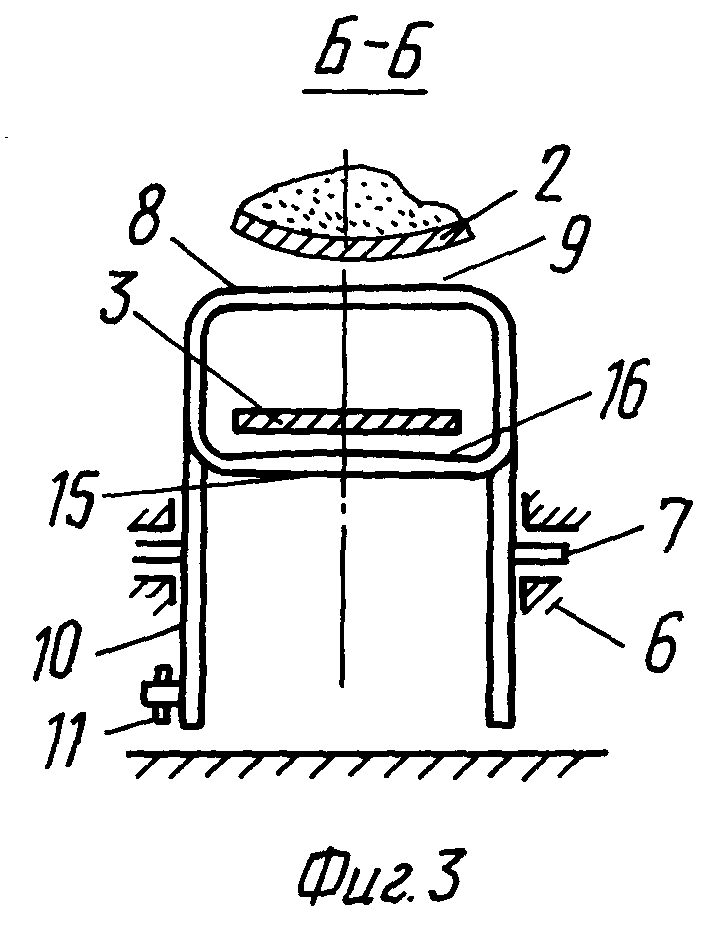
Наклонный ленточный конвейер показан на прилагаемом чертеже, где на фиг. 1 - вид сбоку, на фиг. 2 - разраз А-А по фиг. 1, на фиг. 3 - разрез Б-Б по фиг. 1.
Наклонный ленточный конвейер состоит из огибаемого бесконечной лентой головного (приводного) барабана 1, при этом грузонесущая 2 и обратная (холостая) 3 ветви ленты опираются соответственно на роликоопоры 4 и 5, закрепленные на раме 6 конвейера.
На раме 6 с помощью шарниров 7 установлены рабочие органы улавливающего устройства в виде сдвоенных двуплечих рычагов трубчатого сечения П-образного профиля, поперечина 8 (верхняя горизонтальная часть) в которых при нормальной работе конвейера с зазором 9 размещена под грузонесущей ветвью ленты 2, а свободный конец одной из стоек 10 каждого рычага соединен с гибким элементом (тяговым канатом) 11. Гибкий элемент 11 через замковое приспособление 12 связан с противовесом 13. Противовес 13 может быть в сочетании с барабаном и редуктором (не показано). Гибкий элемент 11 может быть связан с силовым цилиндром (не показан). Конвейер оснащен датчиком обрыва ленты 14.
Часть рычагов оснащена дополнительной поперечиной 15, которая с зазором 16 размещена под холостой ветвью конвейерной ленты 3 и закреплена с помощью кронштейнов 17 на верхнем плече стоек 10.
На раме конвейера 6 закреплены неподвижные упоры 18 с возможностью их взаимодействия со стойками 10 рычагов при их повороте.
Гибкий элемент 11, все рабочие органы улавливающего устройства размещены по тракту конвейера и составляют систему, начинающую действовать от привода в виде противовеса 13 или силового цилиндра.
Направляющие движения грузонесущей ветви ленты 2 при нормальной работе конвейера - 19, при обрыве ленты направление движения грузонесущей 2 и холостой 3 ветвей - 20.
Ленточный конвейер действует следующим образом. При нормальной работе конвейера при транспортировании груза вверх или вниз грузонесущая ветвь 2 ленты движется в соответствующем направлении 19, а холостая ветвь 3 ленты - в противоположном направлении. При этом обе ветви опираются на свои роликоопоры 4 и 5. В этот период работы конвейера гибкий элемент 11 и связанный с ним противовес 13 стопорятся замковым приспособлением 12, благодаря чему поперечины 8 двуплечих рычагов не контактируют с ветвями 2 и 3 ленты, которые движутся над поперечинами с зазорами 9 и 16. При обрыве конвейерной ленты обе ветви, и грузонесущая 2, и холостая 3 под действием составляющей силы тяжести начинают скатываться по роликоопорам 4 и 5 вниз, в направлении 20. После обрыва ленты срабатывает датчик обрыва 14 и растормаживает замковое приспособление 12 или подает сигнал на включение силового цилиндра, связанного с гибким элементом 11. Под действием веса противовеса 13 (или усилия на штоке цилиндра) гибкий элемент смещается слева - направо (фиг.1) и поворачивает двуплечие рычаги 10 вокруг шарниров 7 против часовой стрелки. При повороте рычагов 10 их поперечины 8 взаимодействуют с нижней стороной движущейся в направлении 19 грузонесущей ветви ленты 2, приподнимая ее над роликоопорами 4, а дополнительные поперечины 15 одновременно взаимодействуют с нижней стороной (также движущейся в направлении 20) холостой ветви ленты 3, приподнимая ее над роликоопорами 5.
С момента контакта поперечин 8 и 15 с ветвями 2 и 3 ленты между поперечинами 8,15 и ветвями 2,3 ленты возникают силы трения, которые способствуют затормаживанию ветвей 2 и 3 ленты и, кроме того, создают дополнительный крутящий момент, поворачивающий рычаги 10 против часовой стрелки до соприкосновения с упором 18. Рычаги остаются в этом положении до полного затормаживания обеих ветвей 2 и 3 ленты.
Возврат системы в исходное положение осуществляется путем реверса привода конвейера после восстановления целостности ленты после ее обрыва с подъемом противовеса 13 (или реверса силового цилиндра) и фиксацией гибкого элемента 11 замковым приспособлением 12.
Число рабочих органов определяется величиной тормозного усилия и заданной величиной обратного хода ленты после ее обрыва. Расчеты показывают, что протяженность става конвейера, оборудованного рабочими органами улавливающего устройства, не превышает 30-40% от длины конвейера.
Конвейер с улавливающим устройством описанной конструкции применим при любом направлении движения ленты (на подъем или спуск груза), при любом угле наклона и ширине конвейерной ленты, как на грузовых, так и на грузолюдских конвейерах, при этом выбором числа рабочих органов можно задавать величину обратного хода ленты при ее обрыве.
Источники информации
1.Шахмейстер Л.Г., Ляшкевич П.А., Фохтин В.Г. Ловители для наклонных ленточных конвейеров. - М.: ЦНИЭИуголь, 1972, с 12-16, рис.1
Там же, 1972, с. 31 - 33, рис. 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ КОНВЕЙЕРНОЙ ЛЕНТЫ В СЛУЧАЕ ЕЕ ОБРЫВА | 1992 |
|
RU2043284C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279388C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279390C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2001 |
|
RU2186716C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279391C1 |
| ПРОМЕЖУТОЧНЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 1992 |
|
RU2043282C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279389C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2003 |
|
RU2241651C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2003 |
|
RU2234448C1 |
| БРЕМСБЕРГОВЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279387C1 |
Изобретение относится к конвейеростроению, а именно к наклонным ленточным конвейерам, оснащенным устройством для улавливания оборвавшейся ленты, и может быть использовано на подъемных конвейерах горных предприятий и наклонных конвейерах дробильно-сортировочных заводов и обогатительных фабрик. Конвейер содержит бесконечно замкнутую гибкую ленту с грузонесущей и холостой ветвями, улавливающее устройство, двуплечий рычаг и снабжен дополнительными двуплечими рычагами, выполненными трубчатыми П-образного профиля с возможностью подъема грузонесущей ветви, и дополнительными поперечинами под холостой ветвью с возможностью взаимодействия с ней. Благодаря такому выполнению конвейер применим при любом направлении движения ленты (на подъем или спуск), при любом угле наклона и ширине конвейерной ленты как на грузовых, так и на грузоподъемных конвейерах, при этом выбором числа рабочих органов можно задавать величину обратного хода ленты при ее обрыве. 3 ил.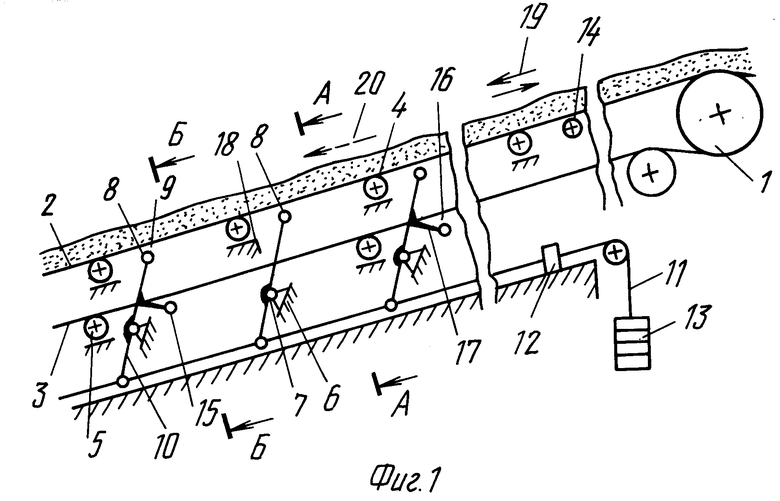
Наклонный ленточный конвейер, включающий бесконечно замкнутую на концевых барабанах гибкую ленту, грузонесущая и холостая ветви которой опираются на закрепленные на раме конвейера роликоопоры, улавливающее устройство, состоящее из шарнирно закрепленного на раме сдвоенного двуплечего рычага, оснащенного рабочим органом с возможностью его взаимодействия с конвейерной лентой при повороте рычага, датчик обрыва ленты, замковое приспособление, привод двуплечего рычага, отличающийся тем, что конвейер снабжен дополнительными двуплечими рычагами, установленными по тракту конвейера и кинематически связанными между собой гибким элементом, соединенным с приводом, при этом двуплечие рычаги выполнены трубчатыми П-образного профиля с возможностью подъема грузонесущей ветви ленты поперечинами рычагов при их повороте и фиксации в этом положении упорами, а гибкий элемент соединен с нижними свободными концами рычагов, причем часть рычагов снабжена дополнительными поперечинами, размещенными под холостой ветвью ленты с возможностью взаимодействия с ней и закрепленными на верхних плечах рычагов посредством кронштейнов.
| Шахмейстер Л.Г., Ляшкевич П.А., Фохтин В.Г | |||
| Ловители для наклонных ленточных конвейеров | |||
| - М.: ЦНИЭИуголь, 1972, с.31-33, рис.8 | |||
| Стопорное устройство наклонного ленточного конвейера | 1990 |
|
SU1738740A1 |
| Устройство для улавливания конвейерной ленты в случае ее обрыва | 1988 |
|
SU1706940A1 |
| Устройство для улавливания лентыКОНВЕйЕРА B СлучАЕ EE ОбРыВА | 1979 |
|
SU829507A1 |
