Изобретение относится к области информационно-измерительной техники и может быть использовано в океанологии, авиации, а также в других областях техники, в которых используется светолокация с процессом визуализации исследуемых явлений с повышением контраста исходного изображения.
Известны оптические способы обнаружения подводных объектов [1,2], основанные на приеме и анализе отраженного подводным объектом лазерного излучения, создаваемого установленным на авиационном носителе лазером.
Наиболее близким к предлагаемому является способ дистанционного анализа характеристик водной поверхности, реализованный в лидаре-спектрофлуориметре [3]. Этот способ заключается в следующем.
Лазер испускает узкий пучок оптического излучения ультрафиолетового (УФ) диапазона, попадающий на океаническую или морскую поверхность и возбуждающий флуоресценцию составляющих океанической или морской воды в приповерхностном слое. Принятый обратный сигнал складывается из сигнала обратного рассеяния, сигнала комбинационного рассеяния и флуоресцентного сигнала. Амплитудно-спектральные характеристики последнего определяются свойствами воды, находящейся в приповерхностном слое. Из принятого сигнала с помощью монохроматора с автоматизированной системой сканирования по спектру выделяют флуоресцентную составляющую и измеряют спектральное распределение энергии флуоресцентного сигнала. При этом число зондирований (посылок импульса УФ-излучения) точки водной поверхности определяется числом длин волн, на которые настраивается монохроматор при анализе спектра флуоресцентного излучения. Амплитудно-спектральное распределение флуоресцентного сигнала в каждой зондируемой точке запоминается и анализируется с помощью ЭВМ с целью определения изменчивости характеристик этого распределения.
Недостатками известного способа являются малая оперативность и низкая вероятность обнаружения гидродинамических подводных возмущений в толще океанических вод, обусловленные необходимостью многократного зондирования каждой исследуемой точки водной поверхности и применения сложного алгоритма обработки полученных спектров. Применение этого способа для построения траектории распространения подводного возмущения является сложной технической и вычислительной задачей.
Целью изобретения является повышение оперативности и степени вероятности обнаружения внутренних волн, движущихся подводных объектов, а также обеспечение возможности обнаружения других гидродинамических неоднородностей в толще воды. Для достижения поставленной цели предлагается способ обнаружения внутренних волн, движущихся подводных объектов и других источников подводных возмущений, заключающийся в облучении поверхности океанических и морских вод узким пучком оптического излучения УФ-диапазона, последовательном приеме обратных сигналов из точек, расположенных на большой площади, размеры которой достаточны для определения характерных размеров подводного возмущения, выделении флуоресцентной составляющей, измерении спектрального распределения энергии флуоресцентного сигнала, представлении реального спектра сигнала псевдоцветом и построении на экране дисплея панорамной картины пространственного распределения полученного псевдоцветового сигнала, с помощью которой оператор, используя психофизиологические особенности человеческого зрения, дает заключение о наличии или отсутствии подводного возмущения. Величина площади морской поверхности определяется техническими возможностями лоцирующей системы.
Теоретической основой предлагаемого способа является исследованная заявителем возможность [4] обнаружения неоднородности горизонтального распределения флуоресценции хлорофилла и растворенного органического вещества при наличии нарушения стационарного вертикального распределения флуоресценции этих реагентов под влиянием движения объекта в толще воды. Указанное явление заключается в следующем.
Известно, что горизонтальное распределение флуоресцирующих веществ на поверхности океана является квазиоднородным, а вертикальное их распределение - существенно неоднородным. При гидродинамическом возмущении в толще воды (например, внутренней волне), вызванном как естественными процессами (например, колебаниями океанского дна), так и движением некоторого объекта, возможен вынос на поверхность вод, находящихся в промежуточных слоях между горизонтом, где происходит возмущение, и поверхностью. В силу существенной неоднородности вертикального распределения флуоресцирующего вещества при таком выносе вод возникает участок на поверхности океана с интенсивностью флуоресценции, отличающейся от равновесной, то есть нарушается однородность горизонтального распределения поля флуоресценции на поверхности океанических вод.
При облучении точки (участка поверхности, площадь которого равна площади пятна лазерного излучения) океанской поверхности излучением УФ-диапазона возникает флуоресценция, регистрируемая фотоприемным устройством, которое одновременно, при одном акте зондирования одной точки поверхности, производит спектральный анализ принятого излучения и нормирование спектра на сигнал комбинационного рассеяния исходного излучения водой. В полученном спектре выделяются участки - опорные каналы, наиболее чувствительные к изменчивости концентрации и состава флуорентов поверхностного слоя океанических вод. Изменения сигналов в опорных каналах должны быть по возможности линейно независимыми. При линейной независимости сигналов опорных каналов достигается градиентный характер изменения цветовых координат псевдоцветового поля, а значит, и максимальная изменчивость цветности. Последнее обстоятельство является причиной высокой чувствительности метода, поскольку, как отмечалось в [8], на основе литературных данных, ставших классическими, чувствительность глаза к цветовому контрасту намного выше, чем к яркостному. При функциональной линейной зависимости сигналов каналов в псевдоцветовом поле будет преобладать яркостная изменчивость.
Опираясь на собственные исследования заявителя [91 и на богатый литературный материал, в частности на [10], можно отметить, что флуоресцентные сигналы растворенных органических веществ и хлорофилла имеют ненулевую ковариацию, но коэффициент корреляции сильно варьирует в зависимости от гидрофизической ситуации. Учитывая важность информации, даваемую каналом хлорофилла (λ = 685 нм), и сравнительно слабую линейную коррелированность сигнала этого канала с сигналами растворенных органических веществ, выбирают этот канал в качестве одного из опорных. Два других спектральных канала с наименьшей взаимной корреляцией лежат в синей и сине-зеленой части спектра.
Сигналам этих трех каналов ставятся в соответствие сигналы красного, зеленого и синего каналов источника псевдоцветовых сигналов. Таким образом, строят систему индикации реального флуоресцентного сигнала, в котором информационным параметром является цвет, колориметрические характеристики которого определяются соотношениями между спектральными составляющими нормированного на сигнал комбинационного рассеяния флуоресцентного сигнала. Цвета индикации являются, строго говоря, псевдоцветами, поскольку они не отражают истинных цветовых соотношений исходного флуоресцентного сигнала, а выбираются так, чтобы обеспечить наилучшее различение флуоресцентных сигналов.
Ставя в соответствие реальным сигналам спектральных каналов сигналы псевдоцветовых каналов, следует учесть чувствительность составляющих цветового аппарата человеческого глаза. По данным [8] человеческий глаз наиболее чувствителен к изменению красной составляющей, наименее - к изменению зеленой. Каналу с наибольшей относительной изменчивостью должна соответствовать спектральная составляющая псевдоцвета, изменению которой глаз наименее чувствителен. Таким образом, за счет использования психофизиологических особенностей зрения человека достигают повышения контрастности панорамной картины.
Параметры псевдоцветового сигнала и координаты точки поверхности, которой он соответствует, могут быть заархивированы с помощью ЭВМ. На экране дисплея персональной ЭВМ строится карта морской поверхности, отражающая пространственное распределение псевдоцветового сигнала. По характеру пространственной изменчивости псевдоцветовой картины оператор в реальном масштабе времени делает заключение о наличии подводных гидродинамических возмущений и их характере.
В качестве конкретной реализации предлагаемого способа может быть рассмотрен панорамный авиационный лидар, блок-схема которого приведена на фиг. 1.
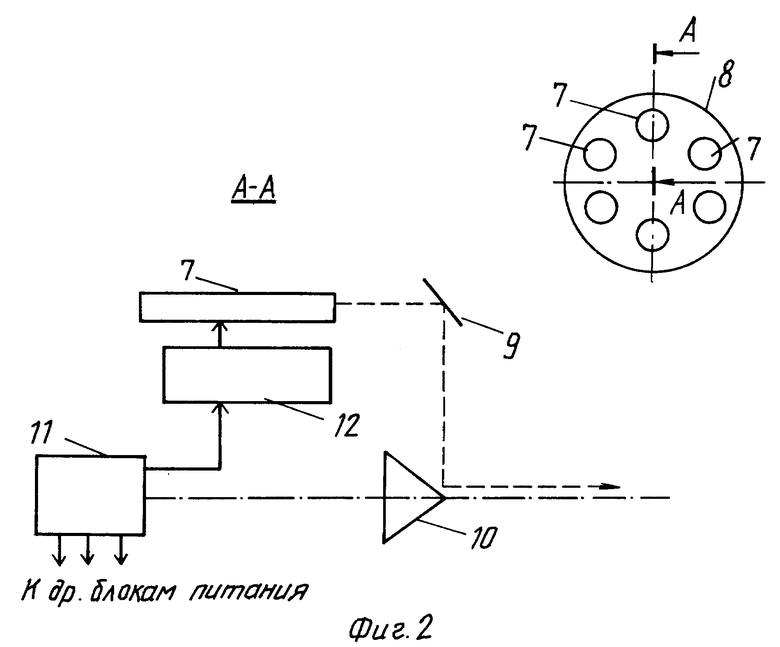
На фиг. 2 приведена схема лазера авиационного панорамного лидара.
Лидар установлен на самолете и состоит из многоголовочного импульсного УФ-лазера 1, системы пространственного сканирования 2, четырехканального фотоприемника 3, блока обработки сигналов 4, персональной ЭВМ на базе процессора "Pentium" 5 и дисплея 6.
Многоголовочный импульсный УФ-лазер изготовлен на базе рубинового излучателя с модуляцией добротности и двукратным преобразованием частоты мощностью 0,8 МВт в импульсе длительностью τ = 20 нс, конструкция и технические характеристики которого описаны в [5]. Шесть излучателей 7 установлены внутри барабана 8, перед каждым излучателем установлено коническое зеркало 9, отклоняющее луч к оси барабана. Каждый лазерный излучатель имеет частоту повторения импульсов, равную 12,5 Гц. Работая поочередно, излучатели позволяют лазеру в целом генерировать оптические импульсы с частотой повторения 75 Гц. Для обеспечения поочередной работы сигнал управления от коммутатора 11 поочередно подается на блоки питания и управления 12 головок.
Узкий лазерный луч расходимостью около 0,5 градуса, сформированный в многоголовочном лазере, поступает в систему сканирования, например, описанную в [6], которая направляет его в заданную точку морской поверхности, посылая одновременно информацию о координатах этой точки в ЭВМ. Четырехканальный фотоприемник, выполненный на базе фотоэлектронных умножителей ФЭУ-118, один из спектральных каналов которого настроен на спектр комбинационного рассеяния, а три других - на выбранный спектральный канал, принимает сигнал флуоресценции и передает его в блок обработки сигналов. Подробное описание фотоприемника дано в [7]. Прием сигналов производится с полосы, поперечный размер которой составляет до 1,5 км. В блоке обработки сигналов, построенном в стандарте КАМАК, происходит параллельное аналого-цифровое преобразование сигналов, пришедших из фотоприемника. Из блока обработки четыре преобразованных в цифровую форму сигнала поступают в ЭВМ, где производят деление трех из них на четвертый (сигнал канала комбинационного рассеяния), преобразование полученных трех нормированных сигналов в псевдоцветовой сигнал путем прямого кодирования видеоподсистемы, обеспечиваемого техническими характеристиками ЭВМ на базе процессора "Pentium". На экране дисплея высвечивается точка, цвет и яркость которой характеризуют флуоресценцию соответствующего участка водной поверхности. Множество точек дает панорамную картину поверхности, перемещающуюся в соответствии с движением самолета. Характер изменения цветности и яркости полученного цветового поля позволяет оператору делать заключение о характере неоднородностей, их пространственном распределении.
Следует отметить, что для реализации предлагаемого способа требуется выполнение только самых простых вычислительных операций, поскольку работу по распознаванию образов выполняет человек-оператор, а ЭВМ только предоставляет ему необходимую информацию. В силу этого лидар работает в реальном масштабе времени.
Применение предлагаемого способа обнаружения динамических неоднородностей в толще воды позволит увеличить достоверность и оперативность получаемой информации, что важно для решения как научных, так и прикладных задач.
Литература
1. Optical detection method for submerged objects. Пат. США N 3604803. МКИ3 G 01 C 3/08, НКИ 356-5.
2. Optical depth finder and element therefor. Пат. США N 3669540. МКИ3 G 01 C 3/08, G 02 B 27/28, НКИ 356-4.
3. А.Г. Варжапетян и др. Автоматизация контроля параметров водной среды. - Л.: "Судостроение", 1988. - 272 с.
4. Приборы экспресс-диагностики экологического состояния атмосферы, водоемов и подстилающей поверхности. - Отч. по ОКР гос. N 01940001774, ГНЦ ВЭИ, 1994. - 66 с.
5. Абрамов О.И., Еремин В.И., Займидорога И.О., Перепечко С.И. Судовой лидар - спектрофлуориметр ЛСБ-6 для дистанционного анализа водных сред. - В кн. : "III съезд сов. океанологов. Тез. докл. Секция "Физика и химия океана, акустика и оптика океана"", Л.: ААНИИ, 1987, - с. 94 - 95.
6. Абрамов О.И., Карлсен Г.Г., Кравцов А.В. Система сканирования панорамного самолетного лидара, - Тез. докл. 1 межреспубликанского симпозиума "Оптика атмосферы и океана", ч.2, Томск, ТНЦ, СО РАН, 1994, - с. 177 - 178.
7. Абрамов О.И., Еремин В.И., Карлсен Г.Г., Лобов Л.И., Половинко В.В. Исследование поверхностного слоя морской воды методом неконтактного лазерного зондирования. - В кн. " Оптика моря". М.: Наука, 1983, - с. 178 - 182.
8. Соколов Е.Н., Измайлов Ч.А. Цветовое зрение. - М.: МГУ, 1984. -176 с.
9. Исследования возможностей дистанционного лазерного метода обнаружения глубинных оптических неоднородностей, внутренних волн, движущихся подводных объектов в естественных акваториях. - Отч. по НИР. ГНЦ ВЭИ. Арх. N 7287-5300. -М: 1996. - 20 с.
10. Оптика океана. Т.1. Физическая оптика океана. М.: Наука, 1983. - 372 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ГИДРОДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2015 |
|
RU2587685C1 |
| ПОГРУЖНОЙ КОМПЛЕКС ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ВОДНЫХ ОБЪЕКТОВ | 2013 |
|
RU2521246C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И МОНИТОРИНГА ЗАГРЯЗНЕНИЙ МОРСКОГО НЕФТЕГАЗОВОГО ПРОМЫСЛА | 2013 |
|
RU2522821C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И МОНИТОРИНГА ЗАГРЯЗНЕНИЙ МОРСКОГО НЕФТЕГАЗОВОГО ПРОМЫСЛА | 2015 |
|
RU2587109C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЛН ЦУНАМИ, ПРИМЕНИМЫЙ ДЛЯ ВСЕХ ПРИЧИН ИХ ВОЗБУЖДЕНИЯ | 1999 |
|
RU2156988C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОГО ПРИЕМА ВОЛН РАЗЛИЧНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ ИСТОЧНИКОВ, ПРОЦЕССОВ И ЯВЛЕНИЙ АТМОСФЕРЫ, ОКЕАНА И ЗЕМНОЙ КОРЫ В МОРСКОЙ СРЕДЕ | 2014 |
|
RU2602763C2 |
| Способ определения опасности цунами | 2020 |
|
RU2738589C1 |
| Способ дистанционного поиска индикаторных веществ проявлений нефтегазовых углеводородов | 2016 |
|
RU2634488C1 |
| Способ определения аномалий морской поверхности по оптическим изображениям | 2022 |
|
RU2784788C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СРЕДЫ ОТКРЫТОГО ВОДОЕМА | 2010 |
|
RU2503041C2 |
Изобретение относится к области информационно-измерительной техники и может быть использовано в океанологии, авиации, а также в областях техники, в которых используется визуализация исследуемых явлений. Достигаемый технический результат - повышение вероятности обнаружения внутренних волн и других динамических неоднородностей в толще воды. Сущность способа заключается в последовательном облучении поверхности морских вод оптическим излучением ультрафиолетового и видимого диапазонов, приеме обратных сигналов, выделении флуоресцентной составляющей принятого сигнала, преобразовании спектра полученного флуоресцентного сигнала в цветовой спектр и формировании на его основе цветового поля с помощью дисплея, отображающего пространственное поле реальных отраженных сигналов, по которому судят о наличии подводных возмущений. 2 ил.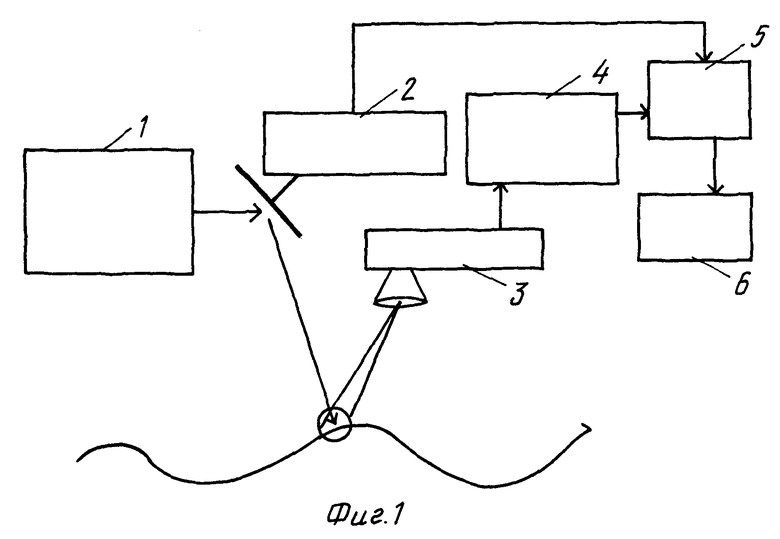
Способ обнаружения внутренних волн гидродинамических подводных возмущений, заключающийся в поочередном облучении поверхности океанических и морских вод оптическим излучением ультрафиолетового диапазона, приеме обратных сигналов последовательно из точек, расположенных на площади, существенно превышающей площадь поверхности однократного зондирования, выделении флуоресцентной составляющей принятого сигнала, измерении спектрального и пространственного распределения энергии флуоресцентного сигнала, отличающийся тем, что облучение каждой точки поверхности производят однократно, выделяют три информационные спектральные составляющие флуоресцентного сигнала, преобразуют спектр полученного флуоресцентного сигнала в цветовой спектр, формируют с помощью дисплея на основе полученных цветовых сигналов цветовое поле, отображающее пространственное поле реальных принятых сигналов, наблюдают цветовое поле, определяют наличие подводных возмущений путем сравнения амплитудно-спектральных характеристик флуоресцентных сигналов, принятых с невозмущенных частей поверхности и с зон поверхности, под которыми имеются гидродинамические возмущения.
| Варжапетян А.Г | |||
| и др | |||
| Автоматизация контроля параметров водной среды | |||
| - Л.: Судостроение, 1988, с.22, 36, 40 - 41, 204 - 205, 210 - 211 | |||
| Гинзбург В.М | |||
| Формирование и обработка изображений в реальном времени | |||
| - М.: Радио и связь, 1986, с.17 - 18, 22, 184 - 185 | |||
| Абрамов О.И | |||
| и др | |||
| Система сканирования панорамного самолетного лидара | |||
| - Тех.докл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - Томск, ТНЦ, СО РАН, 1994, с.177 - 178 | |||
| Абрамов О.И | |||
| и др | |||
| Исследование поверхностного слоя морской воды методом неконтактного лазерного зондирования | |||
| В: "Оптика моря" | |||
| - М.: Наука, 1983, с.178 - 182 | |||
| US 3669540 A, 13.06.72. | |||

