Изобретение относится к средствам диагностики морской поверхности, в частности к дистанционному контролю процессов взаимодействия ветрового волнения и внутренних волн, неоднородных течений и т.п., и может быть использовано для выявления аномалий на морской поверхности, обусловленных неоднородностями подводного рельефа, следов судов, загрязнения морской поверхности.
Основной особенностью, отличающей дистанционные методы исследования океана от контактных, является непрямой характер наблюдения физических процессов и измерения их параметров.
На текущий момент наибольшее распространение получили методы дистанционных исследований в оптическом и радио диапазонах спектра электромагнитных волн.
Радиолокационные методы наиболее предпочтительны в том смысле, что являются всепогодными, позволяющим зондировать океан сквозь туман и облака, ночью и днем, в любом месте мирового океана и на больших территориях. В настоящее время основным источником регулярной информации о параметрах приповерхностного слоя Мирового океана служат радиолокационные системы космического базирования, однако они нуждаются в калибровке. Спутниковые данные ассимилируются в численные модели, что позволяет их уточнять на основе альтернативных дистанционных или контактных измерений.
Таким образом, существует необходимость разработки методов и аппаратуры измерения данных о состоянии морской поверхности, подповерхностного слоя моря и приводного слоя атмосферы, в том числе и в оптическом диапазоне, которые давали бы возможность дальнейшего развития радиолокационных методов исследования, либо служили им альтернативой.
При этом важным становится решение задач разработки эффективных методов анализа оптических и радиолокационных изображений, позволяющих получать информацию о состоянии водной среды с необходимой степенью достоверности.
Так, например, наличие подводных неоднородностей может проявляться в аномальном поведении волнения морской поверхности. Такие аномалии могут быть контрастными, т.е. наблюдаемыми глазом на анализируемых изображениях, а могут быть слабоконтрастными, и тогда вероятность обнаружения аномалии сильно снижается. В последнем случае возникает необходимость привлечения дополнительных информационных признаков наличия аномалии на морской поверхности.
Один из старейших оптических способов регистрации состояния поверхности моря на большой площади - стереофотосъемка с борта самолета. С его помощью также возможно обнаружение контрастных аномалий на морской поверхности, но дороговизна и сложность организации измерений и оборудования и трудоемкость обработки получаемой информации не позволяют пользоваться этим способом на регулярной основе. Кроме того, этот способ не предусматривает работы в режиме реального времени.
Наличие подводных неоднородностей может проявляться и в аномальном обратно рассеянном подповерхностном излучении моря. Изменение подповерхностного излучения может происходить из-за возмущений подводной стратификации гидрооптических характеристик воды при наличии подводных неоднородностей. Изменение стратификации гидрооптических характеристик может регистрироваться с помощью лидаров, а изменение подповерхностного излучения - путем регистрации спектра яркости моря с помощью спектрометров. Эти способы обнаружения аномалий требуют специального дорогостоящего оборудования.
Известен способ получения информации о волнении моря по спектрам плановых аэрофотоснимков, получаемых при съемке в надир. Такой способ позволяет осуществлять обработку информации в режиме реального времени, но требует наличия специально оборудованного воздушного носителя, у которого в полу сделаны люки или иллюминаторы для фотосъемки (Лупян Е.А., Шарков Е.А. О критерии восстановления спектральных характеристик шероховатой морской поверхности по ее оптическому изображению. Иссл. Земли из космоса. 1986. №4. С. 21-31. Е.А. Шарков, Обрушающиеся морские волны: структура, геометрия, электродинамика. М., «Научный мир», 303 с., 2009).
Наиболее близким аналогом к предлагаемому способу обнаружения аномалий является патент РФ №2596628 на изобретение «Способ определения загрязнения морской поверхности» (МПК: G01S 13/88; G01C 11/00, дата публикации: 10.09.2016). В патенте предлагается способ определения загрязнений морской поверхности путем регистрации последовательности оптических изображений поверхности моря при полете авиационного носителя по трассе с дальнейшим восстановлением пространственного спектра волнения методом Фурье-преобразования зарегистрированных изображений с одновременным дистанционным зондированием морской поверхности автодинным радиоволновым измерителем и дальнейшим вычислением индекса загрязнения участков морской поверхности по характеристикам взаимной корреляционной функции сигнала автодинного измерителя и видеокамеры. Недостатком прототипа является то, что в способе дополнительно привлекают средства активного зондирования морской поверхности, что увеличивает громоздкость измерительной аппаратуры и накладывает определенные ограничения на вид носителя. Недостатком прототипа является также то, что он разработан и адаптирован для решения одной задачи - выявление именно нефтяных загрязнений, и соответственно он использует для обнаружения таких аномалий свойственные только им физические особенности.
Задачей, решаемой настоящим изобретением, является разработка способа определения аномалий морской поверхности, обусловленных процессами в приповерхностном слое моря, по ее оптическим изображениям при рассеянном небесном освещении (вне зоны солнечных бликов), полученным с движущегося носителя, позволяющего пассивными компактными оптическими средствами в режиме реального времени с большой степенью достоверности выявлять малоконтрастные аномалии морской поверхности.
Технический результат, заключающийся в повышении степени достоверности выявления аномалий на морской поверхности, в разработанном способе достигается тем, что формируют изображения морской поверхности с привязкой полученных изображений к топографическим координатам посредством навигационной системы, выбирают в каждом их них фрагмент изображения моря для спектрального анализа, затем строят последовательность спектров фрагментов изображений и по ним определяют особенности состояния морской поверхности.
Новым в разработанным способе является то, что при прямолинейном движении носителя (галсе) формируют последовательность изображений морской поверхности с определенным перекрытием и с захватом линии горизонта и части неба с угловой высотой 5-7 градусов при наклонных углах визирования с помощью цифровых видеокамеры или фотокамеры и проводят обработку каждого изображения, определяя угол визирования камеры по положению линии горизонта в изображении, которую, в свою очередь, определяют по перепаду яркости изображения на границе моря и неба, а в последовательности регистрируемых изображений морской поверхности выбирают два не меняющих положение в течение галса фрагмента, причем один из фрагментов выбирают таким образом, чтобы он не попадал в область солнечных бликов на изображении и чтобы в нем укладывалось порядка 10 периодов поверхностных волн, в нем исключают постоянную составляющую яркости поверхности моря и по зеленой (G) составляющей фрагмента изображения определяют относительную площадь обрушений морской поверхности и спектр волнения, в котором, в свою очередь, выделяют не менее чем один спектральный фрагмент, содержащий спектр исследуемой поверхностной волны, по которому путем интегрирования спектра в пределах выбранного спектрального фрагмента определяют интенсивность поверхностной волны и, путем вычисления одномерных спектров по каждой из спектральных координат определяют одномерные спектры волнения, а второй из фрагментов выбирают как можно ближе к надиру либо под углом, близким к углу Брюстера, в нем в каждом изображении определяют относительную спектральную яркость морской поверхности по отношению зеленой (G) к голубой (В) составляющих фрагмента изображения, затем анализируют временные зависимости всех определяемых величин по последовательности изображений морской поверхности в течение галса и принимают решение о наличии аномалии при одновременном отклонении текущих значений не менее, чем трех из этих величин от средних значений, вычисленных по последовательности изображений морской поверхности.
Способ поясняется следующими рисунками.
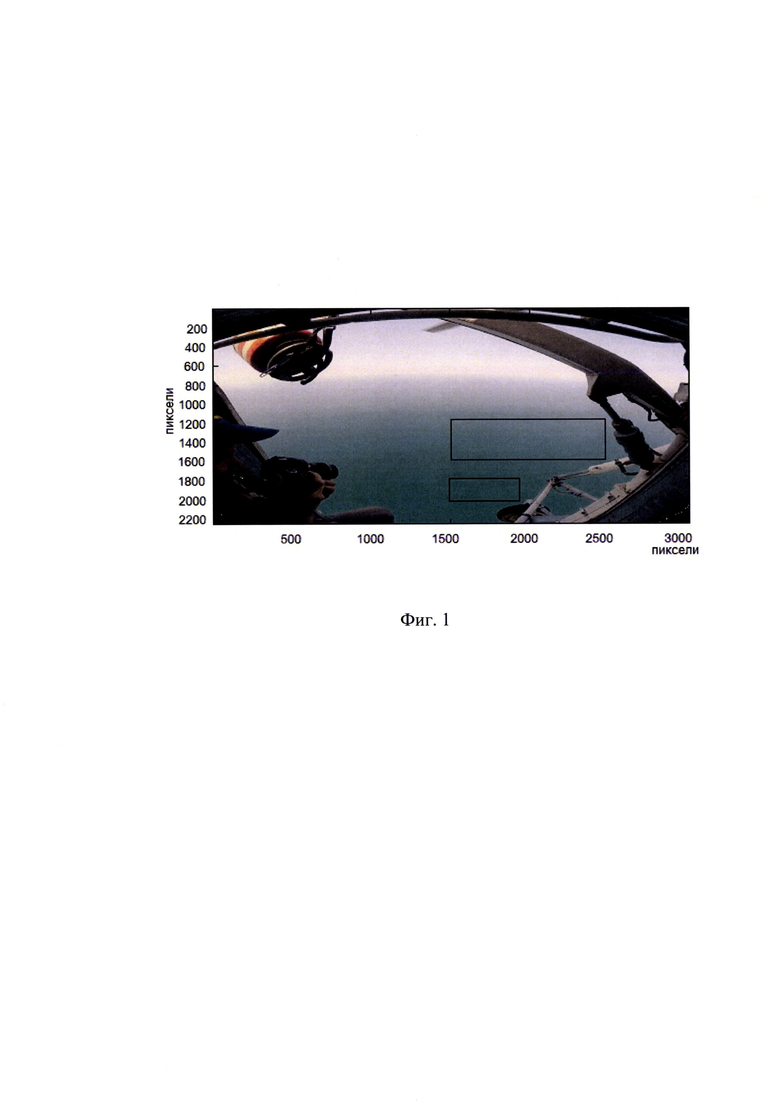
Фиг. 1. Изображение морской поверхности, полученное с борта вертолета. На изображении выделены два фрагмента: большой (верхний) фрагмент для спектрального анализа и определения относительной площади обрушений волн, малый (нижний) фрагмент, расположенный ближе к надиру, для определения спектрального коэффициента яркости морской поверхности. Цифры по осям - номера точек (пиксельные координаты) в приведенном фрагменте изображения.
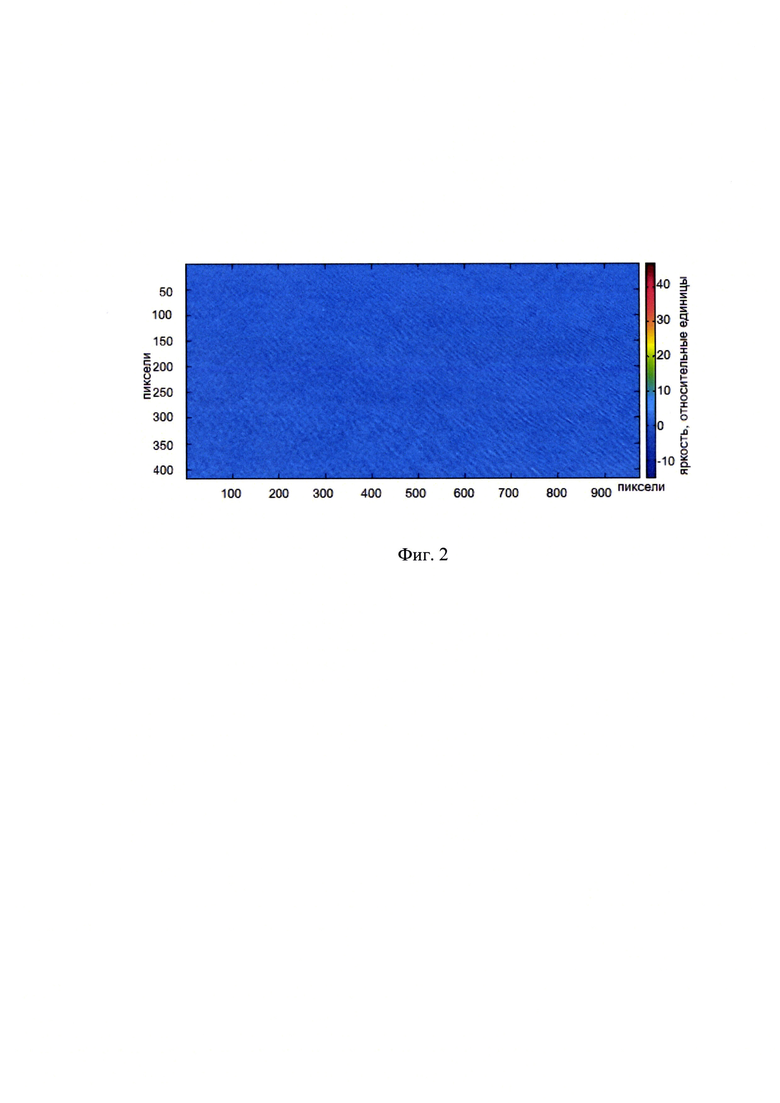
Фиг. 2. Большой фрагмент изображения с фиг. 1 после обработки (алгоритм обработки приведен ниже). Хорошо видна поверхностная волна. Цифры по осям - номера точек (пиксельные координаты) в приведенном фрагменте изображения.
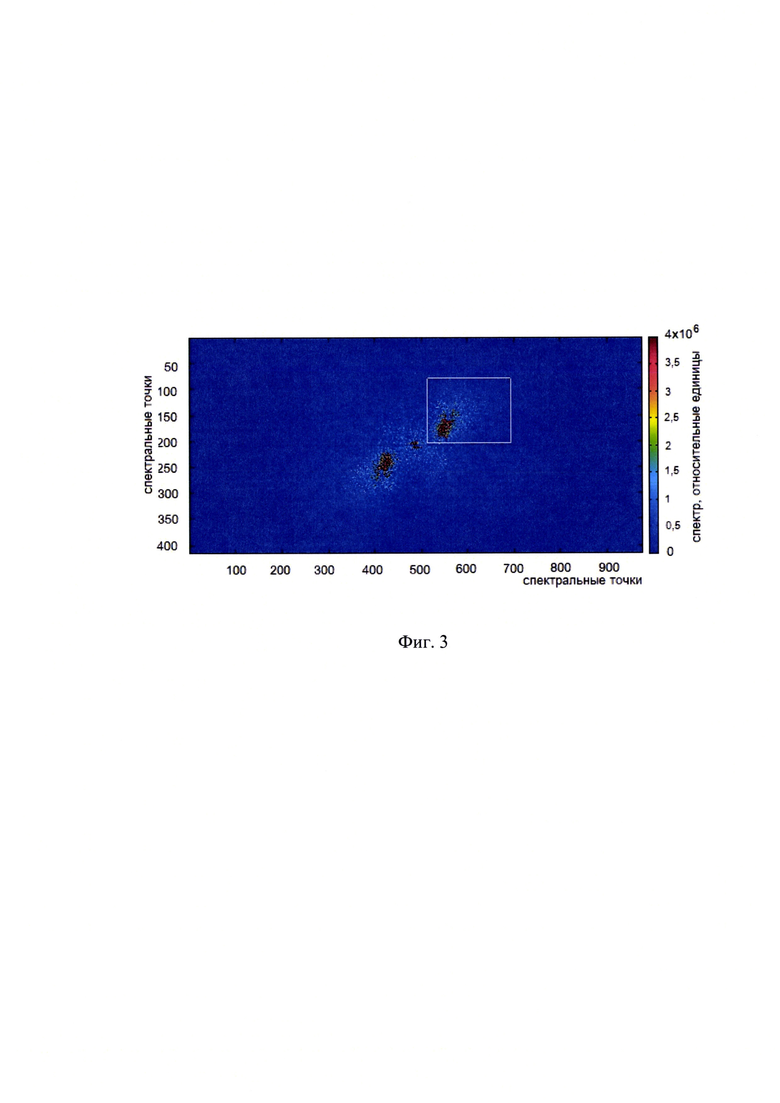
Фиг. 3. Спектр большого фрагмента изображения с фиг. 2. Белой рамкой обозначен прямоугольный спектральный фрагмент, содержащий спектр длинных энергонесущих поверхностных волн. Под энергонесущими волнами понимаются волны с временной частотой вблизи максимума спектра ветровых волн (Ю.М. Крылов. Спектральные методы исследования и расчета ветровых волн. Л., Гидрометеоиздат, 1966). Эти волны имеют длину примерно 10 м - 15 м в зависимости от скорости ветра и разгона, в дальнейшем по тексту они будут упоминаться как длинные поверхностные волны. Этот фрагмент обрабатывают для определения интенсивности длинной поверхностной волны и положения максимума спектра волн. Цифры по осям - номера спектральных точек (пиксельные координаты в спектре) в приведенном фрагменте изображения.
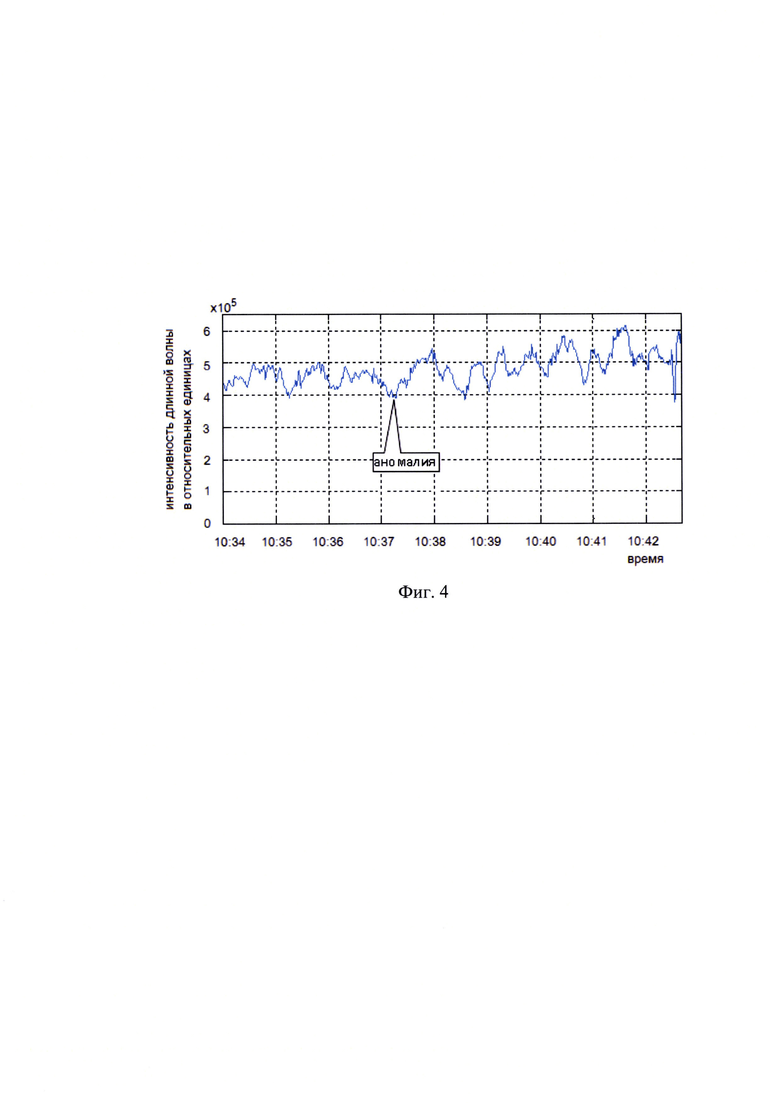
Фиг. 4. Зависимость от времени интенсивности длинной волны в относительных единицах, полученной путем интегрирования спектра в пределах спектрального фрагмента на фиг. 3 во время галса. По горизонтальной оси отложено время в секундах.
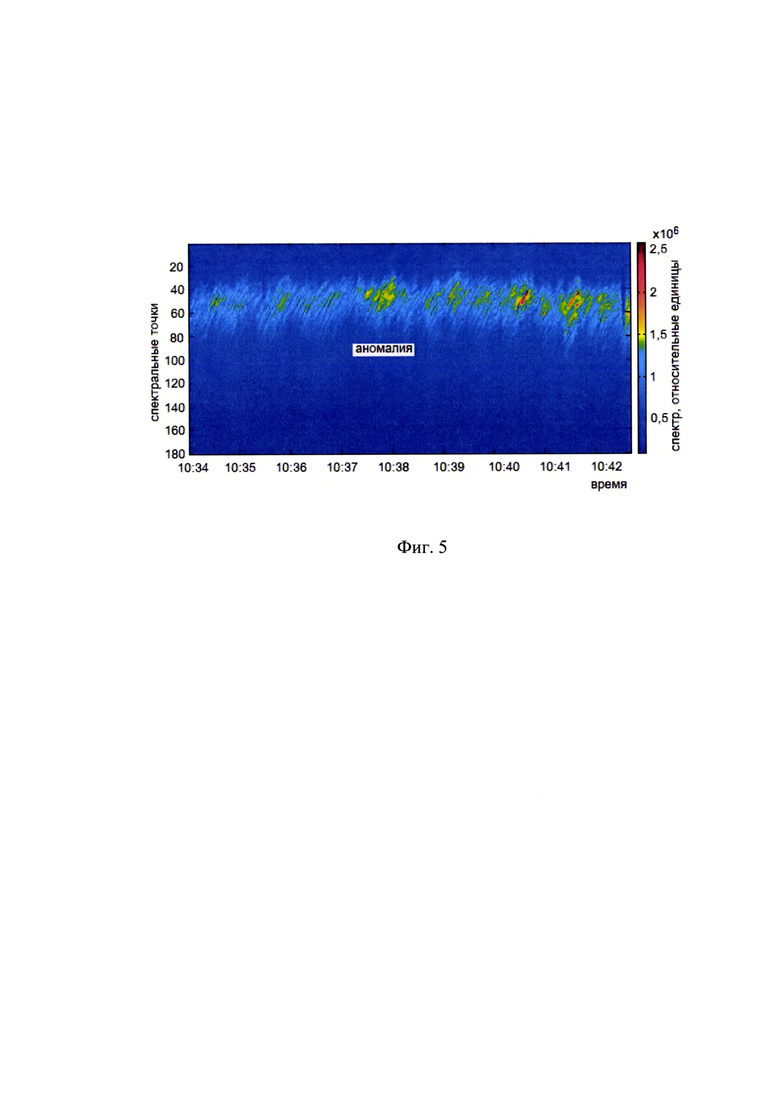
Фиг. 5. Изображение текущего одномерного спектра в зависимости от времени, полученного путем интегрирования фрагмента спектра на фиг. 3 по горизонтальной оси. По вертикали - спектральные точки, по горизонтали - время в секундах. Значения спектра отображаются в полутоновой шкале в относительных единицах.
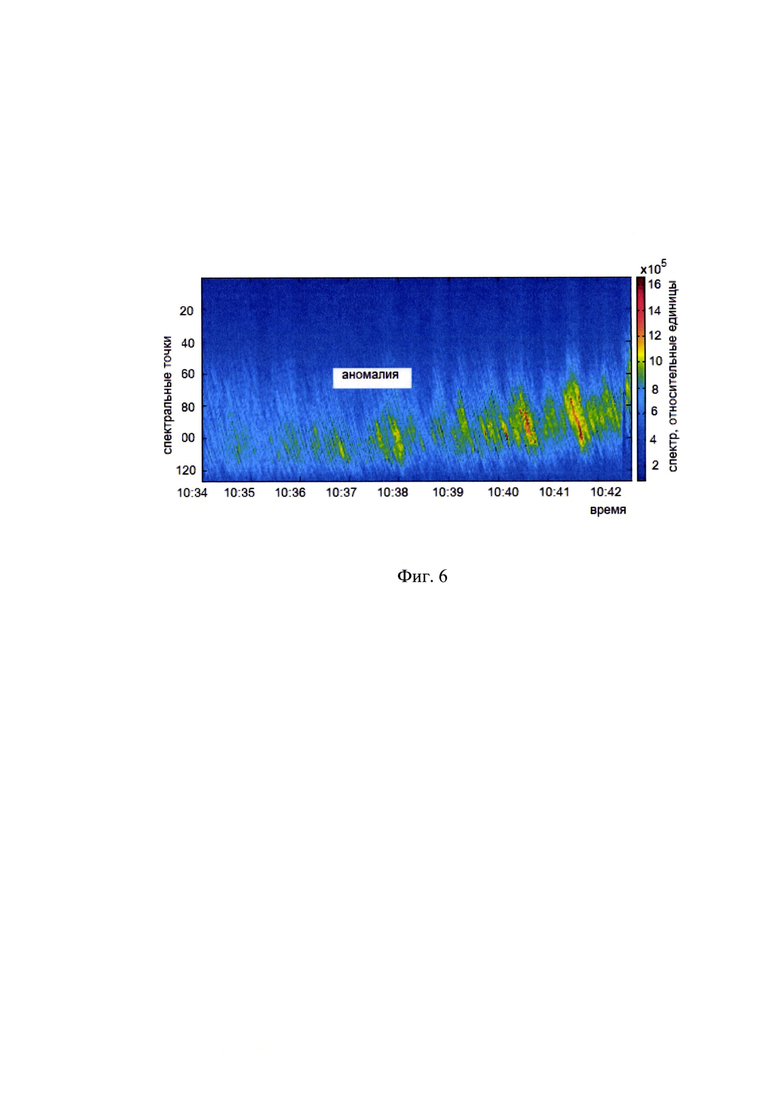
Фиг. 6. Изображение текущего одномерного спектра в зависимости от времени, полученного путем интегрирования фрагмента спектра на фиг. 3 по вертикальной оси. По вертикали - спектральные точки, по горизонтали - время в секундах. Значения спектра отображаются в полутоновой шкале в относительных единицах.
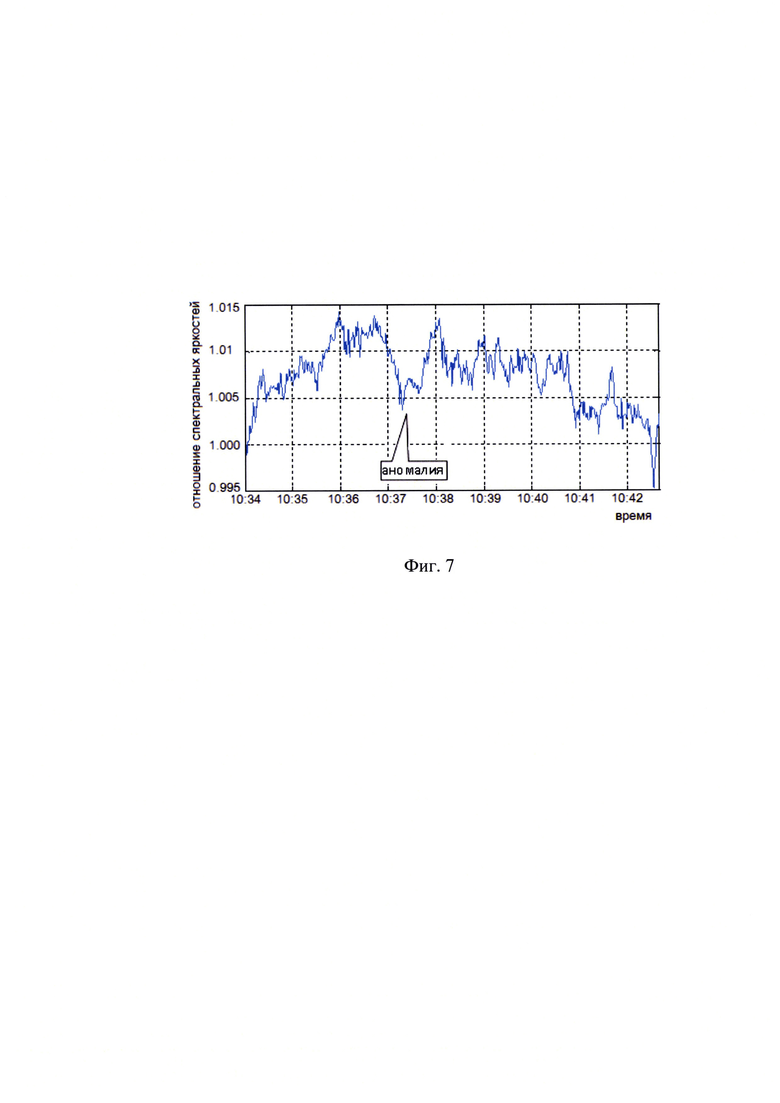
Фиг. 7. Отношение спектральных яркостей морской поверхности: отношение зеленой (G) к голубой (В) составляющих изображения морской поверхности в пределах нижнего фрагмента на фиг. 1.
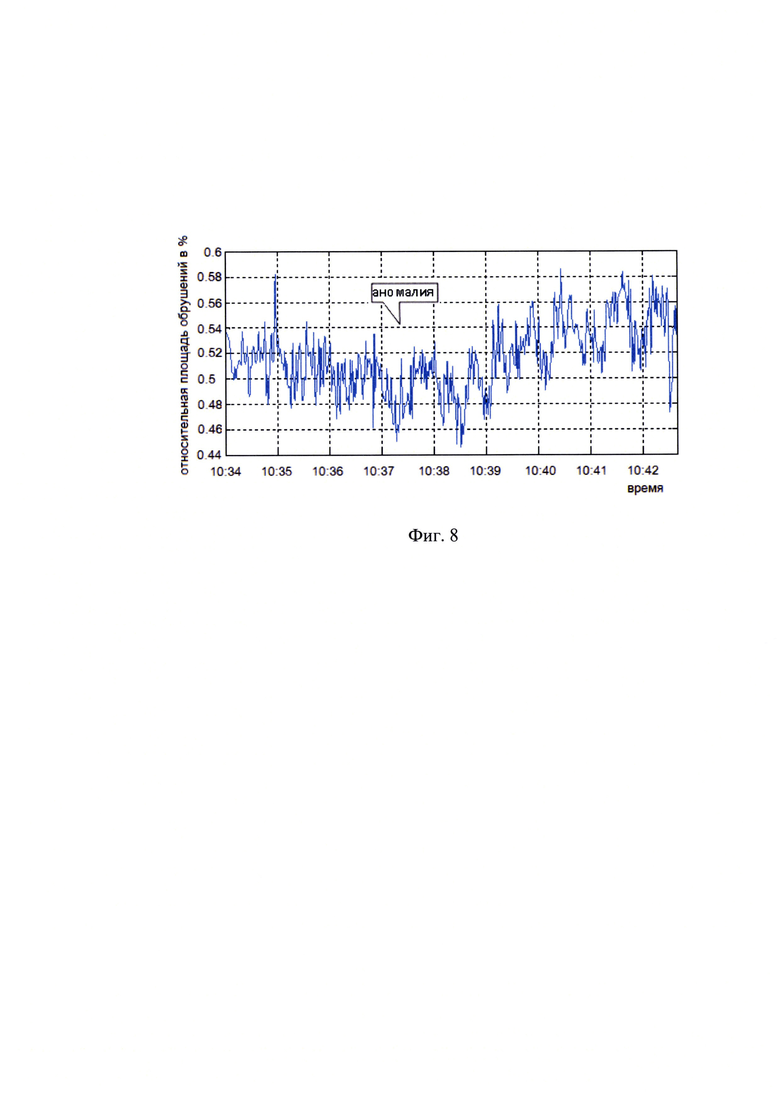
Фиг. 8. Относительная площадь обрушений волн в пределах верхнего фрагмента на фиг. 1 в процентах в зависимости от времени в секундах.
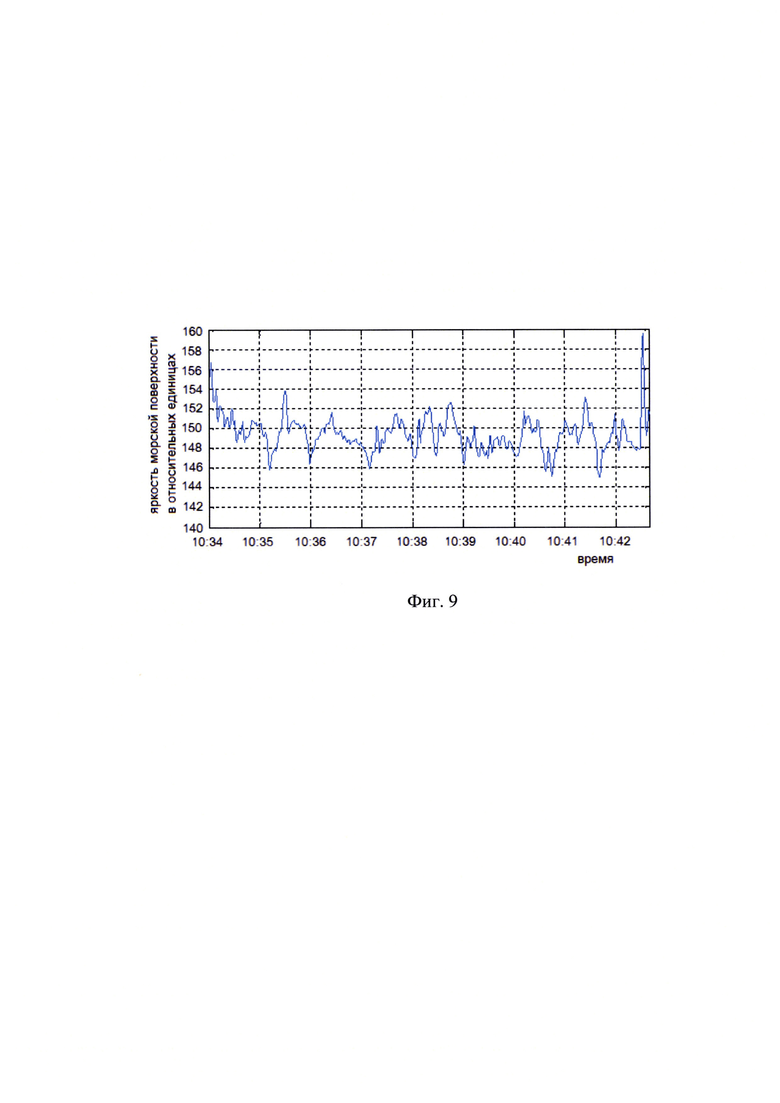
Фиг. 9. Средняя яркость морской поверхности в относительных единицах, полученная усреднением яркости морской поверхности в пределах верхнего фрагмента на фиг. 1.
В предлагаемом способе для обнаружения аномалий на морской поверхности вычисляют набор информативных признаков, дающих информацию о спектре волн на морской поверхности, об обрушениях волн и о подповерхностном излучении моря. В данном способе формируют четыре информативных признака: интенсивность поверхностных волн, координаты каждого максимума спектра поверхностных волн, отношение спектральных яркостей морской поверхности для зеленого и голубого участков оптического спектра, относительная площадь обрушений волн. Если в течение галса во временных зависимостях указанных величин наблюдают одновременное отклонение текущих значений не менее, чем трех из этих величин от средних значений, вычисленных по последовательности изображений морской поверхности, принимают решение о присутствии аномалии на морской поверхности.
Предлагаемый способ осуществляют следующим образом.
Во время движения носителя по выбранному прямолинейному маршруту (или галсу) производят регистрацию последовательности изображений морской поверхности с угловой высотой 5-7 градусов при наклонных углах визирования с помощью фотокамеры или видеокамеры с "захватом" линии горизонта, причем регистрация каждого последующего изображения происходит с некоторым перекрытием с предыдущим. Привязывают полученные изображения морской поверхности к топографическим координатам посредством навигатора системы GPS. При изменении курса носителя при переходе на другой галс меняется ориентация видимых волн, могут появляться солнечные блики и необходимо выбирать новые фрагменты изображения.
Регистрация изображений при наклонных углах визирования позволяет определять угол визирования по изображению видимой линии горизонта, выбирать фрагменты изображения для анализа в различных участках кадра: в рассеянном свете неба, на периферии солнечной дорожки, где наблюдаются сильные контрасты поверхностных волн, а также получать информацию о пространственной неоднородности волнения по одному изображению за счет изменения положения фрагмента в изображении. Кроме того, этот способ съемки не требует наличия специально оборудованного воздушного носителя: съемку можно производить через иллюминаторы или открытые боковые двери (как в вертолете). Также таким способом можно регистрировать изображения поверхности моря с корабля.
В качестве примера реализации предлагаемого способа на фиг. 1-9 приведено изображение морской поверхности, полученное с борта вертолета, и проиллюстрированы стадии обработки последовательности изображений, полученных за время одного галса воздушного носителя. Регистрация изображений проводилась через открытую боковую дверь вертолета. Для регистрации изображений морской поверхности использовалась видеокамера GoPro, регистрирующая изображения морской поверхности с интервалом 1 с (режим time lapse). Изображения регистрировались с определенным перекрытием, зависящим от угловых размеров поля зрения видеокамеры, от скорости носителя и от частоты кадров. В данном случае при скорости вертолета 150 км/ч «сдвиг» соседних изображений на морской поверхности составлял около 40 м. Так как высота полета составляла 500 м - 1 км и более, то на изображении морской поверхности в основном регистрировались только длинные энергонесущие поверхностные волны и зыбь. При наклонных углах наблюдения для регистрации коротких волн с такой высоты не хватало пространственного разрешения. Задачей данных полетов было исследование трансформации длинных энергонесущих волн и волн зыби в аномалиях на морской поверхности.
Определяют угол визирования камеры по положению линии горизонта в изображении, которую, в свою очередь, определяют по перепаду яркости изображения на границе моря и неба (см. фиг. 1). Знание угла визирования видеокамеры позволяет пересчитать координаты изображения на морскую поверхность, определить размеры и положение исследуемых фрагментов изображения на морской поверхности, определить длину и ориентацию длинных поверхностных волн.
На изображении выделяют два фрагмента: большой фрагмент (верхний на фиг. 1) для спектрального анализа и определения относительной площади обрушений волн, и малый фрагмент (нижний на фиг. 1), расположенный ближе к надиру, для определения отношения спектральных яркостей морской поверхности. Фрагмент изображения для спектрального анализа выбирают исходя из следующих критериев: для обеспечения хорошего спектрального разрешения на нем должно укладываться порядка 10 периодов длинных поверхностных волн и он не должен попадать в область солнечных бликов. Положение малого фрагмента изображения выбирают таким образом, чтобы основной вклад в яркость морской поверхности вносило подповерхностное излучение моря. Для этого положение малого фрагмента выбирают как можно ближе к надиру (см. фиг. 1), где меньше всего вклад отраженного излучения неба в яркость поверхности, либо под углом Брюстера, где коэффициент отражения света неба для одной из поляризаций света равен нулю. При обработке последовательности изображений морской поверхности, полученных во время прямолинейного галса, положение всех выделяемых фрагментов изображения (фиг. 1) и спектрального фрагмента (фиг. 3) фиксируют и не меняют во время галса. Таким образом изменение спектра волн может происходить только при наличии аномалии на морской поверхности.
Затем вычисляют текущие значения и анализируют временные зависимости следующих четырех информативных признаков.
1. Интенсивности поверхностной волны.
Для спектрального анализа выбирают зеленую составляющую большого фрагмента изображения морской поверхности (G составляющая изображения), так как эта составляющая самая интенсивная. Изображения морской поверхности характеризуются слабыми контрастами поверхностных волн, в частности, из-за подстилающей приповерхностной дымки при регистрации изображений с вертолета, большой средней яркостью морской поверхности, которая может меняться случайным образом по изображению при неоднородной подсветке или наличии на морской поверхности темных пятен (при сложной текстуре изображений). Спектральный анализ таких изображений характеризуется большим откликом на постоянную составляющую яркости изображений, который может "маскировать" искомые спектры волн. Поэтому большой фрагмент изображения морской поверхности предварительно обрабатывают, исключая постоянную составляющую яркости снимка и выравнивая контрасты волн по фрагменту (фиг. 2), после чего осуществляется спектральный анализ фрагмента (фиг. 3). Далее на спектре фрагмента идентифицируют спектры отдельных волн, существующих на морской поверхности.
Спектры отдельных волн могут быть «размазанными» из-за перспективных искажений волн в пределах фрагмента. В принципе, можно было бы использовать стандартную программу для исправления перспективных искажений изображения, однако, исправление перспективных искажений является нелинейной операцией и при малых оптических контрастах волн на уровне шумов изображений это исправление может внести неконтролируемые искажения в изображение волн и увеличить уровень шумов. Поэтому в приведенном примере обрабатывалось исходное изображение.
Далее выбирают спектральный фрагмент, содержащий спектр длинной волны (фиг. 3). Спектральный фрагмент выбирают путем предварительного просмотра спектров отдельных выбранных изображений морской поверхности. Размер спектрального фрагмента выбирают с определенным «запасом», чтобы при изменениях спектр длинной волны не выходил за пределы спектрального фрагмента. В примере в спектре большого фрагмента изображения присутствует только одна длинная волна. В принципе, на морской поверхности может существовать несколько длинных волн. В этом случае выбирается несколько спектральных фрагментов соответственно спектрам отдельных волн и обработка спектров ведется для каждого спектрального фрагмента. Далее для получения значения интенсивности волны производят интегрирование спектра в пределах выбранного прямоугольного спектрального фрагмента. Затем по временной последовательности изображений морской поверхности формируют временную зависимость интенсивности поверхностной волны.
На фиг. 4 приведена зависимость от времени интенсивности длинной волны в условных единицах, полученной путем интегрирования спектра в пределах спектрального фрагмента на фиг. 3, во время прямолинейного галса. По горизонтальной оси отложено время в секундах. Для построения этой зависимости обработано 420 изображений. Здесь во второй половине галса происходит увеличение интенсивности волны. Кроме того, анализ флуктуаций интенсивности на фиг. 4 показывает, что в середине галса наблюдается самая длительная и большая флуктуация интенсивности волны.
2. Координаты максимума спектра поверхностной волны.
Помимо интенсивности волн существует необходимость определения положения максимума спектра волн, который несет информацию о возможной трансформации длины волн и направления распространения волн во время галса. Эти трансформации могут быть обусловлены гидрофизическими возмущениями в области аномалии.
Алгоритм обработки спектров волнения заключается в формировании двух одномерных спектров волнения путем интегрирования спектра в пределах спектрального фрагмента по одной из частотных осей. В результате за время галса формируется два изображения, по вертикальной оси которых отложены спектральные точки, по горизонтальной оси отложено время, а яркость в условной полутоновой шкале - значения одномерных спектров, полученных интегрированием фрагмента спектра по горизонтальной или вертикальной оси, в условной полутоновой шкале. Такие изображения несут информацию о структуре спектра волнения: о законе спадания спектра, о нахождении максимума или максимумов спектра.
Одномерные спектры вычисляются по частотным осям в выбранном спектральном фрагменте по следующей формуле:
где G(kx,ky) - спектр большого фрагмента изображения морской поверхности (фиг. 1), kx,ky - пространственные частоты по горизонтальной и вертикальной частотным осям. Размер спектра G(kx,ky) по осям пространственных частот определяется размером в пикселях анализируемого верхнего фрагмента на рисунке 1. Соответственно, пределы интегрирования в формулах для одномерных спектров Gx и Gy определяются размером спектра G(kx,ky) (количеством спектральных точек). В рамках линейной модели зависимости яркости изображения морской поверхности от уклонов волн спектр изображения будет пропорционален спектру волн:

где  - вектор градиента яркости морской поверхности по уклонам длинных волн, k(kx,ky) - волновое число, модуль k=2π/λ, где λ - длина волны, Gξ(k) - спектр высот волн на морской поверхности или просто спектр волн (В.В. Баханов [и др.]. Оценка спектров ветровых волн с длинами от сантиметров до метра по изображениям поверхности моря. Морской гидрофизический журнал. 2018. Т. 34, №3. С. 192-205. doi:10.22449/0233-7584-2018-3-192-205).
- вектор градиента яркости морской поверхности по уклонам длинных волн, k(kx,ky) - волновое число, модуль k=2π/λ, где λ - длина волны, Gξ(k) - спектр высот волн на морской поверхности или просто спектр волн (В.В. Баханов [и др.]. Оценка спектров ветровых волн с длинами от сантиметров до метра по изображениям поверхности моря. Морской гидрофизический журнал. 2018. Т. 34, №3. С. 192-205. doi:10.22449/0233-7584-2018-3-192-205).
На фиг. 5 и фиг. 6 приведены изображения временной изменчивости одномерного спектра, полученного путем интегрирования спектрального фрагмента по горизонтальной оси и по вертикальной оси (или частотно-временные спектры по двум осям координат). На рисунках по вертикальной оси отложены спектральные точки, по горизонтальной оси время в секундах, величина одномерного спектра отображается в относительной полутоновой шкале. На рисунках хорошо видны области максимумов спектров. Координаты максимумов для обоих одномерных спектров позволяют определить положение максимума двумерного спектра. На фиг. 5 происходит «дугообразное» изменение положения максимума спектра, причем максимальное смещение спектра достигается в середине галса. Такое поведение максимума спектра свидетельствует о наличии аномалии. На других галсах (в описание данные по ним не приведены) такое смещение спектра не зарегистрировано. Также на фиг. 5 и 6 наблюдается увеличение спектров в середине галса и постепенное увеличение величины спектров к концу галса. Следует отметить, что на фиг. 6 положение спектра в течение галса смещается вверх. Такой устойчивый тренд положения спектров можно интерпретировать как изменение кинематических характеристик длинной волны в течение галса, которое может быть вызвано, к примеру, изменением скорости ветра.
3. Относительная спектральная яркость морской поверхности.
Как известно, в общем случае при анализе яркости морской поверхности помимо отраженного излучения неба необходимо учитывать подповерхностное обратно рассеянное излучение. Это излучение формируется обратно рассеянным в толще воды излучением неба и солнца. Вклад этого излучения может быть незначительным при скользящих углах наблюдения, но он увеличивается при увеличении угла наблюдения, то есть ближе к оптическому приемнику и может быть определяющим при наблюдении вблизи надира. Также вклад подповерхностного излучения может быть значительным при наблюдении вблизи угла Брюстера, где коэффициент отражения света неба для одной из поляризаций света равен нулю. При этом величина и спектральный состав обратно рассеянного света определяются распределением гидрооптических характеристик воды по глубине. Как известно, в морях существует стратификация гидрооптических характеристик по глубине. Например, стратификация гидрооптических характеристик воды может быть связана с определенными микроорганизмами, которые располагаются слоями на определенных глубинах. Наличие подводной неоднородности может привести к перемешиванию различных слоев воды по глубине, что может привести к изменению спектрального состава подповерхностного излучения.
Для вычисления относительной спектральной яркости морской поверхности, которая дает информацию об обратно рассеянном подповерхностном излучении моря, используют малый фрагмент изображения, расположенный как можно ближе к надиру (к носителю) либо под углом, близким к углу Брюстера, где меньше всего вклад отраженного излучения неба в яркость поверхности (фиг. 1).
Для этого выбирают зеленую G и голубую В составляющие изображения, так как спектр подповерхностного излучения моря в основном сосредоточен в сине-зеленой области оптического спектра, и вычисляют отношения G и В составляющих яркости фрагмента изображения.
На фиг. 7 приведена зависимость от времени (в секундах) отношения G/B во время галса. В середине галса наблюдается аномалия, выражающаяся в уменьшении относительной спектральная яркость морской поверхности. Эта аномалия может быть обусловлена изменением стратификации приповерхностного слоя моря, например, под действием подводной неоднородности.
4. Относительная площадь обрушений.
Относительную площадь обрушений для каждого изображения морской поверхности синхронно вычисляют по большому фрагменту изображения (верхнему на фиг. 1) по зеленой G составляющей изображения. Так как оптические изображения могут регистрироваться при разных условиях освещения, для приведения изображений к единому формату используют нормализацию изображений в пределах фрагмента изображения, которая включает в себя приведение к нулевому среднему (устранение тренда или постоянной составляющей яркости фрагмента изображения) и единичной дисперсии. Следует отметить, что при регистрации изображений морской поверхности с воздушного носителя падают контрасты обрушений из-за недостатка пространственного разрешения, наличия подстилающей дымки. Определение площади обрушений путем нормализации изображений позволяет компенсировать падение контрастов обрушений. При этом тренд вычисляют путем аппроксимации полиномом 3-го порядка яркости фрагмента изображения по горизонтальной координате для всех элементов по дальности. Полином 3-го порядка выбран из тех соображений, что достигается достаточная точность аппроксимации распределения яркости фрагмента, с другой стороны, увеличение порядка полинома приводит к большой вычислительной нагрузке. Затем формируют порог и на основе порогового алгоритма формируют изображение с одними обрушениями и вычисляют суммарную площадь обрушений в пределах фрагмента изображения. Для определения относительной площади обрушений используют нормировку (относительную площадь) вычисленной суммарной площади обрушений на площадь фрагмента изображения. Относительная площадь обрушений включает в себя как сами обрушения, так и пенные образования, остающиеся после обрушений (активную и пассивную части обрушений). Такой подход к вычислению площади обрушений позволяет регистрировать изменение относительной площади обрушений для каждого изображения. На фиг. 8 приведена временная зависимость относительной площади обрушений волн в процентах во время галса. Здесь примерно в середине галса наблюдается уменьшение относительной площади обрушений, что может быть связано с локальным «выглаживанием» волнения из-за наличия аномалии в приповерхностном слое моря.
И наконец, решение о наличии аномалии принимают при одновременном отклонении текущих значений не менее чем трех из этих информативных признаков от средних значений, вычисленных по последовательности изображений морской поверхности.
Как видно из приведенного на фиг. 1-9 примера реализации предлагаемого способа морской поверхности по оптическим изображения, полученным с воздушного носителя (вертолета), за время прямолинейного галса над предполагаемой возмущенной областью моря все четыре информативных признака показали наличие аномалии примерно в середине галса: изменение интенсивности длинной поверхностной волны, изменение координат максимума спектра волны, уменьшение отношения яркости моря для зеленой и голубой составляющих изображения и уменьшение относительной площади обрушений. При этом яркость морской поверхности, которая вычислялась путем усреднения зеленой G составляющей яркости большого фрагмента (верхнего на фиг. 1) изображения, не менялась во время галса (фиг. 9), что свидетельствует о том, что выявить аномалию «невооруженным глазом» не представляется возможным.
Описанная обработка изображений морской поверхности может быть осуществлена в реальном времени. Таким образом, предлагаемым способом в середине галса была обнаружена малоконтрастная аномалия, обусловленная предполагаемой подводной неоднородностью, признаки которой отсутствовали на исходных изображениях морской поверхности.
Преимущества предлагаемого способа заключаются в том, что он позволяет обнаруживать аномалии морской поверхности по их одновременным проявлениям на морской поверхности и в глубине моря. Способ позволяет обнаруживать аномалии за счет использования четырех различных информативных признаков аномалии. Привлечение дополнительных информативных признаков особенно существенно в тех случаях, когда один информативный признак не позволяет выделить аномалии с достаточной достоверностью. Кроме того, предлагаемый способ реализуется с помощью компактных и относительно дешевых пассивных оптических средств в режиме реального времени и не требует специального переоборудования носителя для осуществления съемки морской поверхности.
Можно отметить, что с небольшой корректировкой предложенный способ можно применять для определения аномалий морской поверхности и с неподвижного основания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения характеристик аномалий морской поверхности, обусловленных процессами в приповерхностных слоях океана и атмосферы, по ее оптическим изображениям | 2022 |
|
RU2794871C1 |
| Способ определения рельефа уклонов волн морской поверхности по оптическим пространственно-временным изображениям морской поверхности | 2024 |
|
RU2837976C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ХАРАКТЕРИСТИК ПОВЕРХНОСТНЫХ ВОЛН ПО ПРОСТРАНСТВЕННО-ВРЕМЕННЫМ ИЗОБРАЖЕНИЯМ ВОДНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2436040C2 |
| Способ определения скорости ветра над водной поверхностью | 2015 |
|
RU2616354C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЗАГРЯЗНЕНИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2632176C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НАД ВОДНОЙ ПОВЕРХНОСТЬЮ | 2016 |
|
RU2627016C1 |
| Способ идентификации загрязнений морской поверхности | 2015 |
|
RU2664255C2 |
| Способ определения оптической толщины атмосферы | 2019 |
|
RU2729171C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2017 |
|
RU2675072C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ РАЗЛИВА НЕФТЯНЫХ ЗАГРЯЗНЕНИЙ В МОРЕ | 2008 |
|
RU2411450C2 |
Изобретение относится к средствам диагностики морской поверхности, в частности к дистанционному контролю процессов взаимодействия ветрового волнения и внутренних волн, неоднородных течений и т.п. Способ определения аномалий морской поверхности по оптическим изображениям, в котором при прямолинейном движении носителя (галсе) формируют последовательность изображений морской поверхности с определенным перекрытием и с захватом линии горизонта и части неба с угловой высотой 5-7 градусов при наклонных углах визирования с помощью видеокамеры или фотокамеры и проводят обработку каждого изображения, определяя угол визирования камеры по положению линии горизонта в изображении, которую, в свою очередь, определяют по перепаду яркости изображения на границе моря и неба. В последовательности регистрируемых изображений морской поверхности выбирают два не меняющих положение в течение галса фрагмента, причем один из фрагментов выбирают таким образом, чтобы он не попадал в область солнечных бликов на изображении и чтобы в нем укладывалось не менее порядка 10 периодов поверхностных волн, в нем исключают постоянную составляющую яркости поверхности моря и по зеленой (G) составляющей фрагмента изображения определяют относительную площадь обрушений морской поверхности и спектр волнения, а второй из фрагментов выбирают как можно ближе к надиру либо под углом, близким к углу Брюстера, в нем в каждом изображении определяют относительную спектральную яркость морской поверхности по отношению зеленой (G) к голубой (В) составляющих фрагмента изображения. Затем анализируют временные зависимости всех определяемых величин по последовательности изображений морской поверхности в течение галса и принимают решение о наличии аномалии при одновременном отклонении текущих значений не менее, чем трех из этих величин от средних значений, вычисленных по последовательности изображений морской поверхности. Технический результат – повышение степени достоверности выявления аномалий на морской поверхности. 9 ил.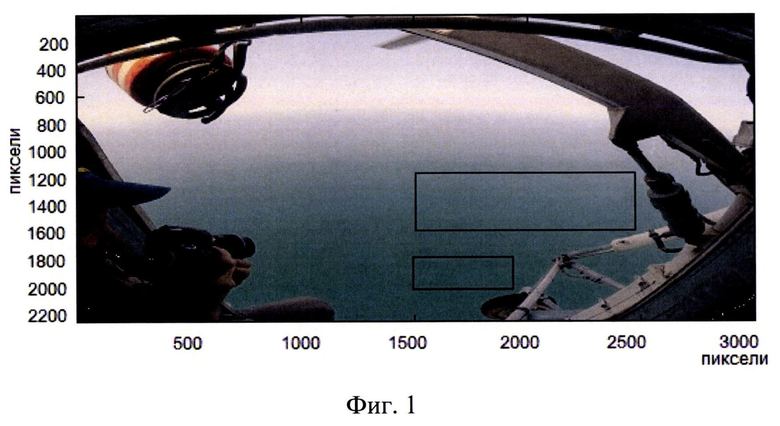
Способ определения аномалий морской поверхности по оптическим изображениям, заключающийся в том, что формируют изображения морской поверхности с привязкой полученных изображений к топографическим координатам посредством навигационной системы, выбирают в каждом их них фрагмент изображения моря для спектрального анализа, затем строят последовательность спектров фрагментов изображений и по ним определяют особенности состояния морской поверхности, отличающийся тем, что при прямолинейном движении носителя - галсе формируют последовательность изображений морской поверхности с определенным перекрытием и с захватом линии горизонта и части неба с угловой высотой 5-7 градусов при наклонных углах визирования с помощью цифровой видеокамеры или фотокамеры и проводят обработку каждого изображения, определяя угол визирования камеры по положению линии горизонта в изображении, которую, в свою очередь, определяют по перепаду яркости изображения на границе моря и неба, а в последовательности регистрируемых изображений морской поверхности выбирают два не меняющих положение в течение галса фрагмента, причем один из фрагментов выбирают таким образом, чтобы он не попадал в область солнечных бликов на изображении и чтобы в нем укладывалось порядка 10 периодов поверхностных волн, в нем исключают постоянную составляющую яркости поверхности моря и по зеленой (G) составляющей фрагмента изображения определяют относительную площадь обрушений морской поверхности и спектр волнения, в котором, в свою очередь, выделяют не менее чем один спектральный фрагмент, содержащий спектр исследуемой поверхностной волны, по которому путем интегрирования спектра в пределах выбранного спектрального фрагмента определяют интенсивность поверхностной волны и путем вычисления одномерных спектров по каждой из спектральных координат определяют одномерные спектры волнения, а второй из фрагментов выбирают как можно ближе к надиру либо под углом, близким к углу Брюстера, в нем в каждом изображении определяют относительную спектральную яркость морской поверхности по отношению зеленой (G) к голубой (В) составляющих фрагмента изображения, затем анализируют временные зависимости всех определяемых величин по последовательности изображений морской поверхности в течение галса и принимают решение о наличии аномалии при одновременном отклонении текущих значений не менее, чем трех из этих величин от средних значений, вычисленных по последовательности изображений морской поверхности.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАГРЯЗНЕНИЯ МОРСКОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2596628C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АНОМАЛИЙ МОРСКОЙ ПОВЕРХНОСТИ | 2017 |
|
RU2675072C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АНОМАЛИЙ НА МОРСКОЙ ПОВЕРХНОСТИ НЕКОНТАКТНЫМ РАДИОЛОКАЦИОННЫМ МЕТОДОМ | 2014 |
|
RU2582073C2 |
| Способ дешифрирования изображений взволнованной поверхности моря | 1982 |
|
SU1121584A1 |
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |

