Изобретение относится к телеметрии, слежению и управлению спутников и, в частности, для спутников, используемых в глобальных мобильных системах связи, применяющих ячеистую технологию.
В современном космическом корабле или спутниках для спутниковых систем используется TTαC транспондер, который является отдельным от системы связи речь/ данные пользователя для таких спутников. Эти транспондеры TTαC в основном выдают команды управления, посылаемые на космический корабль с фиксированной наземной станции. Телеметрическая и следящая информация также поступает от космического корабля на наземную станцию по транспондеру TTαC. Таким образом, для такой связи требуется двухсторонняя транспондерная связь между каждым спутником и наземной станцией.
Телеметрические данные, поступающие со спутника, информируют оператора сети о положении и состоянии спутника. Например, телеметрические данные могут содержать информацию об оставшемся топливе ракет движения, так что можно произвести оценку полезной жизни спутника. Кроме того, производят слежение за критическим напряжением и величиной тока, поступающими в качестве телеметрических данных, которые позволяют оператору определять, правильно или нет работают схемы спутника. Следящая информация содержит кратковременные данные, которые позволяют определять расположение спутника. Более конкретно в данной спутниковой системе используется транспондер TTαC на борту спутника для посылки тонового сигнала вниз на базовую станцию для обеспечения динамического диапазона и номинального диапазона спутника. Высота и угол наклона орбиты спутника могут быть вычислены на основании этой информации оператором наземной станции. Тоновый сигнал может быть модулирован для обеспечения более высокой степени точности при определении динамического диапазона и номинального диапазона. Наземная станция выдает команды управления в ответ на следящие или телеметрические данные на спутник, которые могут использоваться для регулирования орбиты спутника путем включения двигателя спутника. Кроме того, могут выдаваться другие независимые команды управления для перепрограммирования работы спутника при управлении другими функциями спутника.
Информация TTαC в основном кодируется для устранения нежелательной интерференции от сигналов других операторов. В известных системах можно было в основном только обмениваться информацией TTαC со спутником, когда спутник находится в прямой видимости с фиксированной наземной станции. Также известные связи TTαC осуществлялись между конкретной фиксированной наземной станцией и ее спутником и, например, не обеспечивали линию связи с другими спутниками.
Транспондерные линии связи TTαC, которые отделены от каналов речь/ данные, в настоящее время используются в сотнях спутниках. Отдельные транспондеры в основном используются, поэтому обрабатываемая ими информация в основном отличается по происхождению от информации в каналах связи пользователя. Более конкретно информация TTαC может быть по преобладанию в цифровой форме, тогда как связь речь/ данные в некоторых известных спутниковых системах имеет аналоговую форму, для чего требуется вся имеющаяся полоса канала связи речь/ данные пользователя. Кроме того, скорость данных для сигналов TTαC, в основном намного ниже, чем у данных пользователя.
К сожалению, использование предшествующих систем, имеющих отдельные транспондеры для передачи данных TTαC, приводит к некоторым проблемам. Эти известные системы не способны на мобильную работу TTαC, Даже в созвездиях спутников, когда каналы речь/ данные абонента взаимосвязаны между различными спутниками, такая мобильная работа TTαC, не получается из-за невзаимосвязи ответчиков TTαC. Мобильные операции TTαC успешны для отыскания и устранения неисправностей или для ситуаций, когда оператор системы должен оказаться в любом из различных местоположений. Также каждый спутник имеет только один ответчик TTαC. который имеет тенденцию к высокой цене, потому что существенно, чтобы такой ответчик позволял осуществить надежное управление спутника соответствующей наземной станцией.
Кроме того, в этих ответчиках используется электрическая энергия, полученная от бортовой системы выработки энергии, в которой обычно используются солнечные элементы и батареи. Также за счет использования отдельных ответчиков TTαC нежелательно возрастает вес известных спутниковых систем и возрастает стоимость изготовления, испытания и вывода таких спутников на орбиту.
Сущность изобретения
В соответствии с этим целью настоящего изобретения является создание системы TTαC, в которой используется канал речь/ данные для передачи данных TTαC, а следовательно, не требуется ответчик, отдельный от оборудования канала связи данные/ речь абонента.
Другой целью является создание системы TTαC, которая подходит для спутников, применяемых в глобальных, мобильный задачах элементной связи.
В одном из вариантов изобретения система управления включена в состав спутниковой системы связи, имеющей, по меньшей мере, один спутник с приемопередатчиком, обеспечивающим множество каналов связи для установления связи между множеством абонентов. Система управления включает в себя спутниковую подсистему на борту каждого спутника и наземную станцию. Спутниковая подсистема управляет функциями спутника. Один из каналов связи абонента соединен с наземной станцией и со спутниковой подсистемой управления для установления связи TTαC, так, чтобы команды могли передаваться на спутниковую подсистему управления, которая реагирует управлением заданной функции спутника. Система управления также включает в себя блок датчиков на борту спутника для измерения заданных режимов на спутнике и обеспечения передачи телеметрических данных по каналу связи абонента на наземную станцию. Кроме того, система управления также может содержать приемник положения на борту спутника для слежения и выдачи текущих данных спутника. Текущие данные подаются по каналу связи абонента так, чтобы эти текущие данные посылались со спутника на наземную станцию. Также текущие данные могут подаваться на подсистему управления спутника для обеспечения автоматического бортового управления курсом спутника.
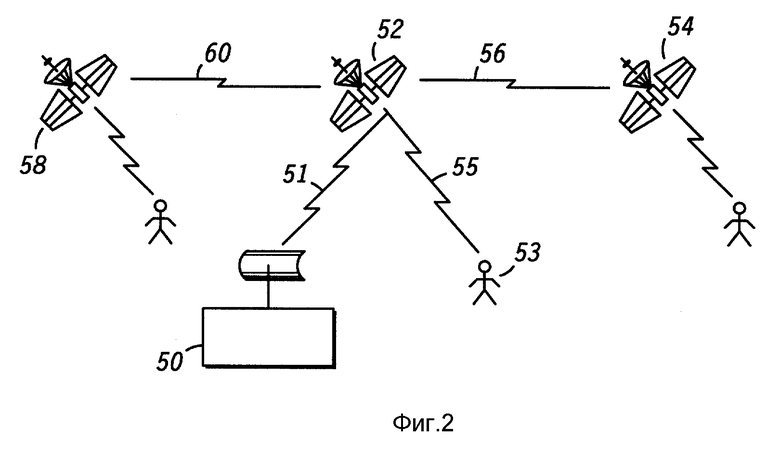
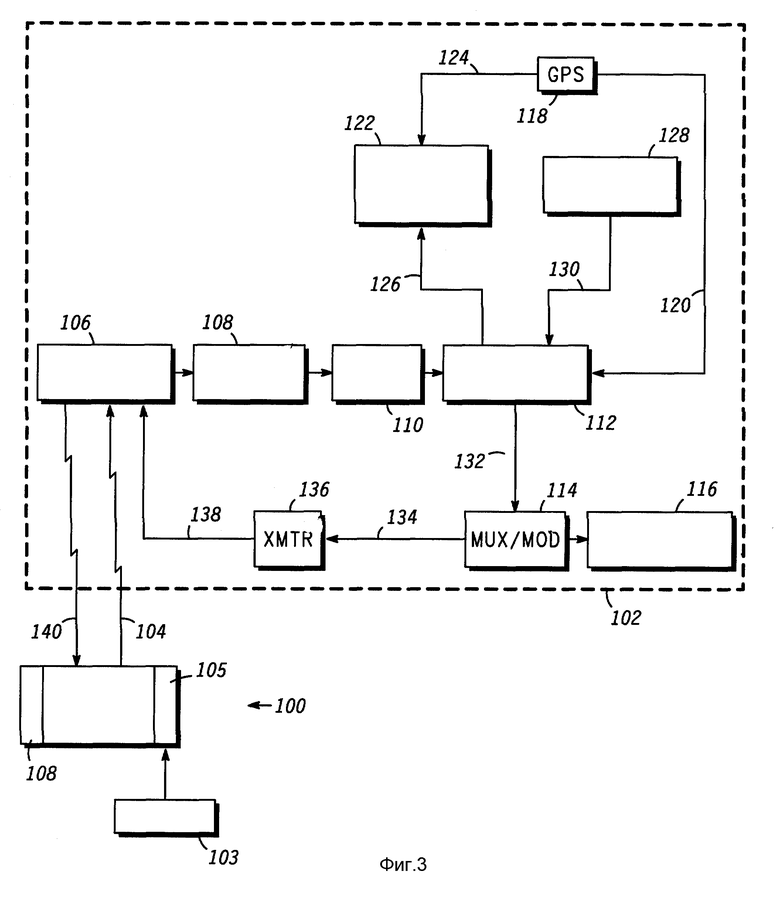
На фиг.1 показана ячеистая диаграмма, создаваемая одним спутником в многоспутниковой ячеистой системе связи, на фиг. 2 показана перекрестная связь между наземной станцией управления и множеством спутников, на фиг.3 показана блок-схема электронной системы для наземной станции управления и спутника.
Спутник 10 содержит множество комбинаций передатчик-приемник данных абонента, далее называемых приемопередатчиками, солнечные приемники 12, передающие антенны 14 и приемные антенны 16. Передатчики приемопередатчиков используют отдельные передающие антенны 14 для одновременного излучения множества движущихся ячеек, образующих диаграмму 18 на части поверхности Земли.
Каждая отдельная ячейка типа ячейки 20 на диаграмме 18 также содержит воздушное пространство над Землей и может быть охарактеризована как коническая ячейка. Оператор системы наземной станции 22, хотя и являющейся мобильной, в основном рассматривается в качестве фиксированной точки на Земле относительно быстро движущегося спутника 10, который может перемещаться со скоростью 17000 миль в час. Ячейки всегда находятся в движении, потому что непрерывно движется спутник 10. Это является противоположностью наземным мобильным ячеистым системам, в которых обычно ячейки рассматриваются как фиксированные, а мобильный абонент перемещается по ячейкам. По мере продвижения ячейки к абоненту ячеичный коммутатор должен "передавать" связь абонента к смежной ячейке. Если спутники все перемещаются в одном и том же направлении и имеют по существу параллельные низкие полярные орбиты, смежная диаграмма ячейки и/или смежная ячейка может быть предсказана ячеичным коммутатором с высокой степенью точности. Для проведения переключения может использоваться информация об амплитуде или информация двоичной погрешности.
В каждой диаграмме спутника ячеистой системы может использоваться множество сгустков из четырех ячеек. Один сгусток содержит ячейки 24, 26, 20 и 28, где ячейки работают на частотах, имеющих величины соответственно обозначенные A, B, C и D. Девять таких узлов показаны на фиг.1 и они образуют диаграмму 18. При повторном использовании частот A, B, C и D происходит деление величины спектра, который бы потребовался для связи с диаграммой 18, примерно на девять. Один из приемопередатчиков спутника 10, например, может использовать частоту связи Земля-спутник 1,5 гигагерц (ГГц) - 1,52 ГГц, а частоту связи спутник -Земля от 1,6 до 1,62 ГГц. Диаграмма 18 каждой ячейки может быть установлена в 250 морских миль в диаметре и для обработки полной диаграммы ячейки ячеистой спутниковой системы может понадобиться 610 с. Спектр частоты ячейки может быть выбран, как предлагается стандартами, опубликованными Ассоциацией электронной промышленности (EIA) для кодирования наземной ячеистой системы. В каналах связи абонента используется цифровая техника для передачи речевой и/или фактической информации от одного абонента к другому.
В соответствии с описанным примером реализации станция управления 22, находящаяся в ячейке 24 частоты "А", передает информацию TTαC на спутник 10 с использованием одного из каналов связи потребителя на ячейках в режиме речь/ данные вместо отдельного приемопередатчика TTαC. Каждый из этих ячеистых каналов абонента представляет собой одну линию речь/ данные, обозначенную трассовым или телефонным номером. Обычно эти каналы начинаются и заканчиваются на поверхности Земли. Однако при использовании в качестве TTαC окончанием линии канала и приемником "вызова" может быть спутник 10. Каждый спутник в узле получает единственный номер (то есть телефонный номер). Наземная станция 22 может связаться непосредственно с любым спутником, в зоне видимости которого он находится, путем генерирования адреса спутника. Аналогично наземная станция 22 также имеет единственный адрес.
Если спутник 10 находится в движении в направлении стрелки 30 так, что ячейка 26 будет двигаться следующей над оператором 22, ячейка "A" 24 перейдет на ячейку 26 "B", которая позднее "перейдет", например, на ячейку "D" 32. Если ячейка 26 становится нерабочей, связь TTαC будет только временно прервана, а не полностью нарушена, как бывает в случае известных систем, имеющих только по одному ответчику TTαC на спутник. Следовательно, ячеечная система, показанная на фиг. 1, обеспечивает высокую степень надежности для обмена TTαC, ввиду избыточности приемопередатчиков, обеспечивающих каждую ячейку.
Как показано на фиг. 2, наземная станция 50 может подавать информацию TTαC на спутник 52, находящийся в прямой видимости, по каналу 51 абонента. Спутник 52 принимает и посылает TTαC от станции 50 наряду с мультиплексными каналами данных абонента, например, от абонента 53 по каналу 55. Ячеечный коммутатор распознает идентификатор или адрес спутника для спутника 52 таким же путем, каким сеть распознает наземные обозначения. Также если необходимо пропустить данные TTαC на другой спутник 54, который не находится в прямой видимости станции 50, тогда эти данные могут быть посланы на спутник 52, а затем переданы по линии 56 на спутник 54. Аналогичные меры могут быть предприняты для всех дополнений сети и данных TTαC на каждый спутник и от каждого спутника сети.
Если необходимо сообщить о состоянии спутника 58 и данных приемника положения на станцию 50 наземного управления, он вырабатывает сигнал вызова и пропускает данные по линии 60, используя единственный номер для спутника 52. Затем информация TTαC передается на Землю по каналу 51 на станцию управления 50. Обычно спутники типа 52, 54 и 58 опрашиваются по данным TTαC, а серьезные события, влияющие на состояние любого данного спутника, вырабатываются и посылаются этим спутником через другие спутники, если это необходимо, на станцию управления. Таким образом, система позволяет осуществлять постоянную передачу данных TTαC и от станции управления 50, даже если станция управления 50 не находится на линии наблюдения находящегося на связи спутника.
На фиг.3 показаны блок-схемы наземной станции 100 и спутника 102. Наземная станция 100 может быть либо фиксированной постоянной станцией или мобильным абонентом, использующим компьютер с модемом для связи через стандартный телефон. Средство кодирования 103 обеспечивает "адресный" сигнал на передатчик 105. По линии 104 приемопередатчика передаются сигналы от передатчика 105 станции управления 100 на антенную подсистему 106 спутника 102. Приемник 108 спутника 102 соединен между антенной подсистемой 106 и системой 110 демодулятора/демультиплексора.
Маршрутизатор 112 соединен между выходом системы 100 и входом мультиплексора / модулятора 114. Маршрутизатор 112 также обрабатывает адреса всех входящих данных и посылает соответственно адресованные данные на другие спутники, например, через мультиплексор/ модулятор 114, который также соединен с двусторонней приемопередающей подсистемой 116. Маршрутизатор 112 кодирует соответствующие адреса в сигналы, имеющие назначения, отличные от спутника 102. Маршрутизатор 112 отсортировывает любые сообщения для спутника 102, которые обозначены своим адресным кодом. Приемник положения 118 глобального установочного спутника (GPS) соединен с маршрутизатором 112 через проводник 120 и со спутниковой подсистемой 122 через проводник 124. Маршрутизатор 112 соединен со спутниковой подсистемой управления 122 через проводник 126 и с сенсорной подсистемой 128 - через проводник 130. Спутниковая подсистема управления 122 расшифровывает командные сообщения от маршрутизатора 112 для спутника 102 и вызывает осуществление определенных действий. Сенсорная подсистема 128 подает телеметрические данные на маршрутизатор 112.
Приемник положения 118 глобальной установочной системы (GPS) принимает информацию от существующих спутников (GPS) известным способом и определяет точное местоположение спутника 102 в космосе. Орбитальные космические вектора получают на основе этой информации. Приемник положения 118 также определяет положение спутника 102 относительно созвездия GPS. Эту информацию сравнивают с информацией о заданном положении, записанной в маршрутизаторе 112. Сигналы погрешности вырабатываются приемником положения 118 GPS и посылаются на спутниковую подсистему управления 122 спутником для автоматической коррекции курса. Сигнал ошибки используется в спутниковой подсистеме управления 122 для контроля небольших ракет, играющих роль "держателя курса". Следовательно, спутник 102 использует информацию GPS для управления его собственным курсом, а не только для получения курсоконтроля от станции 100. Этот бортовой контроль позволяет устанавливать положение спутника 102 и контролировать его в пределах нескольких метров.
Приемник положения GPS 118 также создает пространственные вектора на маршрутизатор 112, а сенсорная подсистема 128 обеспечивает подачу другой телеметрической информации по проводнику 130 на маршрутизатор 112, который составляет сообщения, которые подаются по проводнику 132 на мультиплексор/ модулятор 114 и по проводнику 134, передатчик 136 и проводнику 138 - для передачи антенной подсистемой 106. Затем эти сообщения передаются по линии 140 на приемник 108 наземной станции 100. Или же, когда необходимо связаться с другой станцией управления по другой спутниковой линии, сообщения, составленные маршрутизатором 112, посылаются через приемопередающую двустороннюю подсистему 116. Таким образом, каждый спутник может "знать" свое положение, а также положение своих соседей по созвездию. Наземный оператор также имеет постоянный доступ к этой текущей информации.
Следовательно, в отличие от известных систем, которые не содержат приемники положения GPS, следящая или текущая информация для спутника 102 вычисляется на борту спутника 102. Спутнику 102 не надо иметь постоянные исправления траектории от наземной станции 100. Однако информация контроля траектории обеспечивается от наземной станции 100, когда в этом есть необходимость. Сигнал GPS является цифровым сигналом, который совместим с цифровыми ячеечными линиями связи или каналами, используемыми для наземной связи абонент-абонент. Бортовой захват формата цифрового сигнала GPS позволяет вставлять следующую информацию в каналы, нормально используемые для передачи речевой и/или фактической информации.
Система имеет много преимуществ по сравнению с известными системами, в которых используется отдельный ответчик TTαC в каждом спутнике. А именно, если ответчик в известной системе выходит из строя, спутник становится бесполезным. В ином случае, поскольку наземная станция 22 на фиг.1, например, может использовать любой из приемопередатчиков, связанных со спутником 10, даже если один из этих приемопередатчиков и выйдет из строя, остаются еще 35 других, с помощью которых станция 22 может поддерживать связь TTαC со спутником 10. Кроме того, как показано на фиг. 2, даже если все связи спутник-Земля конкретного спутника, например, 58 выйдут из строя, наземная станция 50 сможет связаться с тем спутником с помощью двусторонней связи, например, 60 через другой спутник, например 52. Таким образом, система по изобретению обеспечивает надежную связь TTαC.
Также система TTαC может находиться в постоянной связи с конкретным спутником посредством двусторонней связи, а не ожидая линию прямой видимости, как в некоторых известных системах TTαC. Для известных систем TTαC требуется, чтобы наземная станция была фиксирована, тогда как для данной системы можно использовать мобильные наземные управляющие станции. Мобильная наземная станция имеет единственный адрес или телефонный номер, присвоенный ей, и за положением наземной станции можно следить так же, как следят за абонентами со спутников ячеечных спутниковых созвездий.
В данной следящей системе используется приемник GPS на борту спутника для обеспечения бортового слежения и следящего управления, а не только наземного управления слежением. Эта цифровая информация слежения сразу вводится в цифровой ячеечный канал абонента.
Система относится к телеметрии, слежению и управлению спутников и, в частности, для спутников, используемых в глобальных мобильных системах связи, применяемых ячеистую технологию. Технический результат - обеспечение телеметрии, слежения и управления (TTαC) спутников системы для спутниковых ячеечных систем связи, использующей один абонентский канал связи речь/данные для передачи данных TTαC на спутник и через один спутник на другой спутник. Для этого глобальный позиционирующий приемник положения (GPS) на борту каждого спутника выдает сигналы управления положением на бортовую спутниковую подсистему управления и приемник положения сообщает текущую информацию на наземную станцию по ячеечному абонентскому каналу данных. 2 с. и 17 з.п.ф-лы, 3 ил.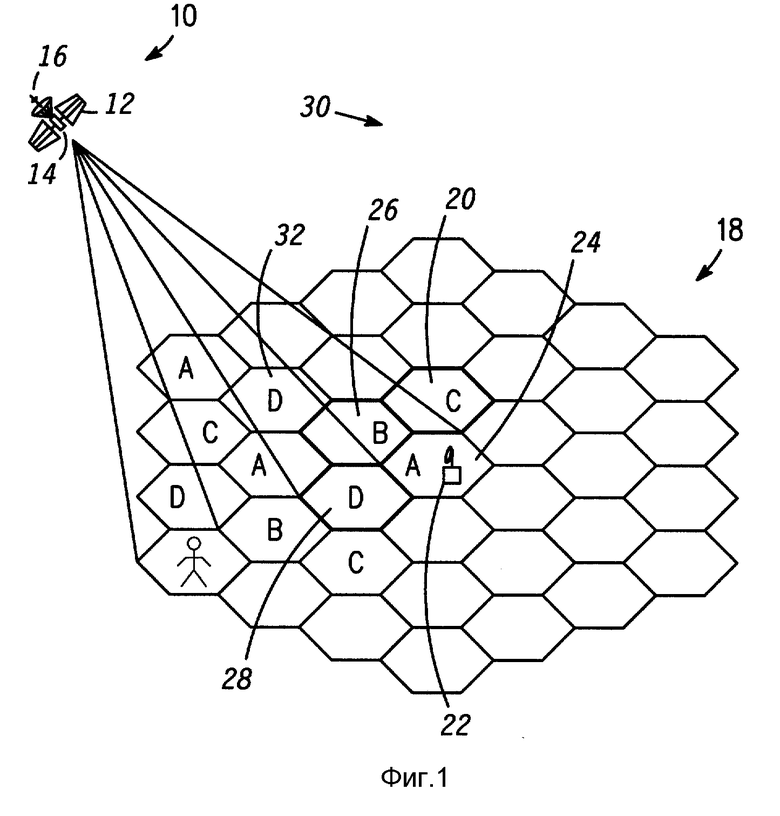
| US 3349531 A, 05.09.67 | |||
| US 3772701 A, 13.11.73 | |||
| US 4456988 A, 26.06.84 | |||
| US 4700374 A, 13.10.87 | |||
| US 4722083 A, 26.01.88 | |||
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Льнотеребильная машина | 1931 |
|
SU27523A1 |
| Способ изготовления молотовых штампов | 1957 |
|
SU114678A1 |
| СПОСОБ УСИЛЕНИЯ КОЛОННЫ И СОЧЛЕНЕННЫХ ЭЛЕМЕНТОВ ПЕРЕКРЫТИЯ ЗДАНИЯ | 2012 |
|
RU2498034C1 |
| Приемо-передающее устройство радиосвязи подвижных объектов | 1984 |
|
SU1267627A1 |

