Изобретение относится к пьезоэлектрическим двигателям, предназначенным для работы в составе прямых (безредукторных) приводов исполнительных устройств в автомобильной промышленности (приводы стеклоочистителей, стеклоподъемников, антенн, замков дверей и т.д.), в системах автоматики, бытовой техники и др.
Известны пьезоэлектрические двигатели [1, 2]. Они включают в себя ротор и статор на основе кольцевого пьезоэлемента, одна из цилиндрических поверхностей которого заключена в оболочку, на которой установлены толкатели. Оболочка выполнена металлической и жестко закреплена на пьезоэлементе.
В качестве прототипа выбран пьезоэлектрический двигатель [2], согласно формуле которого наибольшая эффективность составного осциллятора достигается при определенных параметрах пьезоэлемента и оболочки.
Недостатками этого пьезоэлектрического двигателя являются следующие.
Жесткое крепление на наружной цилиндрической поверхности кольцевого пьезоэлемента сплошной металлической оболочки возможно посадкой с натягом, клеевым соединением или пайкой. При соединении посадкой технически невозможно обеспечить гарантированный натяг, не снижающий существенно эффективность составного осциллятора. Вместе с тем, клеевое или паяное соединение обуславливает наличие соединительного шва, линейный размер которого в радиальном направлении многократно превышает амплитуду колебаний пьезоэлемента, а прочность его сцепления с пьезокерамикой меньше прочности пьезокерамики.
Опытным путем установлено, что увеличение мощности пьезоэлектрического двигателя [2] ограничено значением предельно допустимой амплитуды колебаний пьезоэлемента, обусловленным прочностными свойствами соединительного шва между оболочкой и пьезоэлементом.
Разница коэффициентов линейного расширения металлической оболочки и пьезоэлемента обуславливает ограниченность интервала рабочих температур пьезоэлектрического двигателя [2], при превышении которого резко уменьшается эффективность составного осциллятора - вплоть до полного останова.
Цель изобретения - увеличение удельной мощности и расширение интервала рабочих температур пьезоэлектрического двигателя.
Для этого в пьезоэлектрическом двигателе, содержащем ротор и статор на основе кольцевого пьезоэлемента, внешняя цилиндрическая поверхность которого заключена в оболочку, на которой установлены толкатели, оболочка выполнена разрезной, стянутой в окружном направлении винтовой стяжкой.
Сущность предложенного технического решения состоит в реализации начальной продольной деформации оболочки, равной (или большей) сумме слагаемых, определяемых максимальной рабочей амплитудой колебаний пьезоэлемента и максимальной рабочей температурой двигателя, что обеспечивает увеличение удельной мощности и расширение интервала рабочих температур пьезоэлектрического двигателя.
На фиг. 1 показан предложенный пьезоэлектрический двигатель, поперечный разрез; на фиг. 2 - варианты конструктивного исполнения винтовой стяжки.
Пьезоэлектрический двигатель (см. фиг. 1) включает кольцевой пьезоэлемент 2, заключенный в оболочку 3, на которой установлены толкатели 4, упирающиеся во внутреннюю поверхность ротора 1, оболочка 3 выполнена разрезной и стянута в окружном направлении винтовой стяжкой.
Винтовая стяжка (см. фиг. 1), включающая винт 5, гайку 6 и шайбу 7, обеспечивает требуемую начальную деформацию оболочки 3, передавая окружное усилие через отогнутый край оболочки 3, либо через ушко 8, припаянное (приваренное) к оболочке 3 (см. фиг. 2,а,б) или шарнирно связанное с оболочкой 3 осью 9 (см. фиг. 2,в).
Пьезоэлектрический двигатель работает следующим образом.
При подключении пьезоэлемента 2 к источнику электрического сигнала определенной частоты в пьезоэлементе 2 возникают продольные радиальные резонансные колебания (пульсации), которые при согласованных собственных резонансных частотах пьезоэлемента 2 и оболочки 3 с высокой эффективностью передаются в оболочку 3, а через нее - в толкатели 4, которые фрикционно взаимодействуют с ротором 1, вращают его.
Положительная полуволна пульсаций внешней поверхности пьезоэлемента 2 упруго деформирует находящуюся с ним в механическом контакте оболочку 3, перемещая в радиальном направлении закрепленные на ней концы толкателей 4.
Во время отрицательной полуволны пульсаций внешней поверхности пьезоэлемента 2 постоянство механического контакта между ним и оболочкой 3, как и движение в радиальном направлении закрепленных на оболочке 3 концов толкателей 4, осуществляется за счет накопленной в оболочке 3 суммарной энергии упругой деформаций (которая уменьшается с увеличением температуры составного осциллятора вследствие разницы коэффициентов линейного расширения пьезоэлемента 2 и металлической оболочки 3).
Достаточность необходимого уровня суммарной энергии упругой деформации оболочки 3 во время отрицательной полуволны пульсаций пьезоэлемента 2 при известных максимальных значениях амплитуды пульсаций и температуры составного осциллятора определяется величиной начальной деформации оболочки 3, реализуемой винтовой стяжкой 5,6.
Предлагаемая конструкция составного осциллятора позволяет увеличить допустимую амплитуду резонансных колебаний пьезоэлемента, что повышает удельную мощность пьезоэлектрического двигателя. Кроме того, такая конструкция обеспечивает расширение интервала рабочих температур пьезоэлектрического двигателя.
Источники информации
1. Патент Великобритании N 2118374, кл. H 02 N 11//00, 1983.
2. Авторское свидетельство СССР N 1825435, кл. H 02 N 2/00, 1991.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1825435A3 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| СТАТОР ВИНТОВОЙ ГЕРОТОРНОЙ ГИДРАВЛИЧЕСКОЙ МАШИНЫ | 2006 |
|
RU2318135C1 |
| ОСЦИЛЛЯТОР ДЛЯ БУРИЛЬНОЙ КОЛОННЫ | 2014 |
|
RU2565316C1 |
| Пьезоэлектрический двигатель | 1980 |
|
SU1023455A1 |
| Пьезоэлектрический двигатель | 1980 |
|
SU1023457A1 |
| ОСЦИЛЛЯТОР БУРИЛЬНОЙ КОЛОННЫ | 2021 |
|
RU2768784C1 |

Изобретение предназначено для использования в составе прямых (безредукторных) приводов исполнительных устройств в автомобильной промышленности, в системах автоматики, бытовой техники и др. Пьезоэлектрический двигатель содержит ротор и статор на основе кольцевого пьезоэлемента, внешняя цилиндрическая поверхность которого заключена в оболочку, на которой установлены толкатели. Оболочка выполнена разрезной, стянутой в окружном направлении винтовой стяжкой. За счет реализации регулируемой начальной продольной деформации оболочки удалось обеспечить увеличение удельной мощности и расширение интервала рабочих температур пьезоэлектрического двигателя. 5 ил.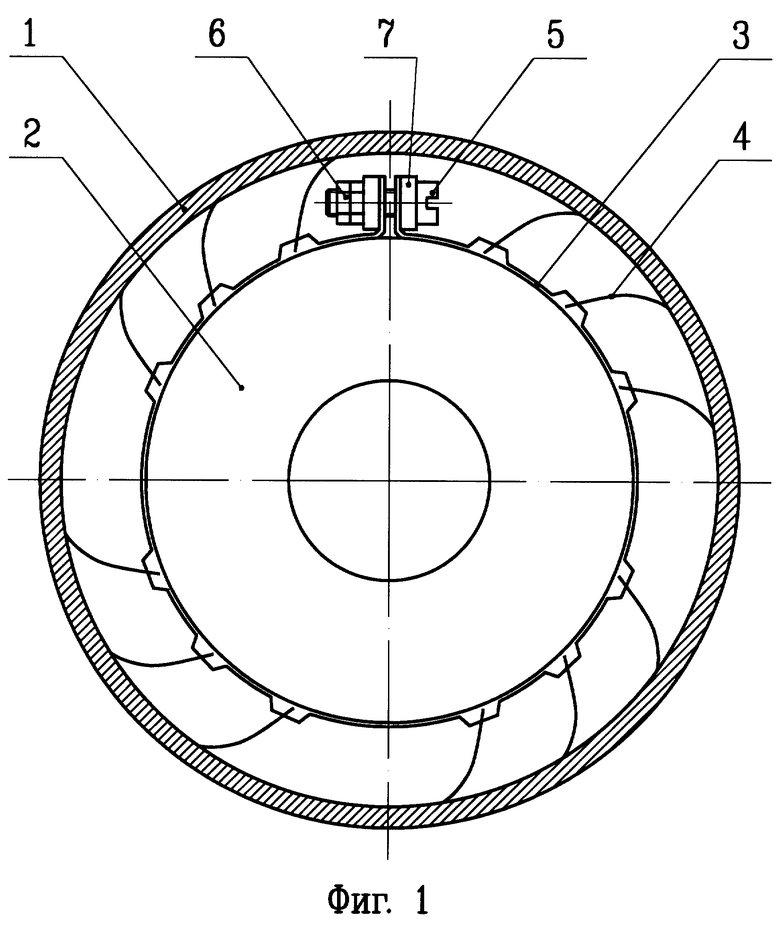
Пьезоэлектрический двигатель, содержащий ротор и статор на основе кольцевого пьезоэлемента, внешняя цилиндрическая поверхность которого заключена в оболочку, на которой установлены толкатели, отличающийся тем, что, с целью увеличения удельной мощности и расширения интервала рабочих температур пьезоэлектрического двигателя, оболочка выполнена разрезной, стянутой в окружном направлении винтовой стяжкой.
| Пьезоэлектрический двигатель | 1991 |
|
SU1825435A3 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1807548A1 |
| US 4453103 A, 05.06.84 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| ТОРСИОННЫЙ МНОГОДИАПАЗОННЫЙ СИЛОИЗМЕРИТЕЛЬ | 0 |
|
SU313130A1 |
