Изобретение относится к микроэле тродвигателям, которые могут быть использованы в лентопротяжных механизмах, вентиляторах, электробритва и других устройствах. Известе.н пьезоэлектрический двиг тель, содержащий корпус и установле ные в нем ротор и вибратор в виде пьезоэлектрической пластины, одним концом опирающийся на рот Р Ij Основной недостаток такого двига теля - несимметрия расположения пьезоэлемента, которая приводит к п вышенной трудоемкости изготовления корпуса двигателя и низкой его компактности. В конструкции двигателя плохо используется объем, определяе мый габаритными размерами. Наиболее близким по технической сущности к предлагае1« му является пьезоэлектрический двигатель, содер- jO жащий корпус и установленные в нем ведог ай орган и полый цилиндрический пьезоэлемент с пластинами-толкателями, установленными, по крайней мере, «а одной из его поверхностей и упру- 25 го прижатьн и к поверхности ведомого органа. При работе двигателя в цилин дрическом пьезозлементе - вибраторе возбуждаются продольные колебания по высоте цилиндра. Двигатели с пьезоэлементом цилиндрической формы компактны и технологичны в нэготовле-НИИ 2 . Однако режим макскма т ного КЦД известного двигателя лежит в режимах больших моментов на валу. Для получе ния такого режима необходимо на пьезоэлемента установить максимальное число пластин-толкателей и максимсшьно их нагрузить,Практически пластина-толкатель из стали толщиной 0,1 мм и шириной 3 мм развивает усилие Примерно 0,5 Н. Максимальное число пластин-толкателей, которое может быть установлено на цилиндрическом пьезоэлементе 20 мм, равно 50 шт. Таким образом, для получения режима максимального КПД пьезоэлемент необходимо нагрузить усилием 25 Н. При наличии двух роторов усилие равно 50 Н. Частота вращения при высоте ци-Йиндра вибратора 20 мм примерно равйа 1е. При этом мощность на валу Примерно равна 3 Вт. Если КПД двига еля в режиме максимального КПД 30%, о потребляемая им мощность примерно Равна 9 Вт. в режиме свободного ротоВа (т.е. при отсутствии нагрузки на Валу) потребляемая мощность максиМальна 120-30 Вт). Она ограничена ВНутренним механическим сопротивлеНием двигателя (сопротивлением потерь те керамике и на опорах),. Дяя уменьшеЧия мощности, потребляемой пьезозлек ричвским двигателем в режиме его работы со свободньвл ротором,необходимо увеличить его внутреннее сопротивление, т.е. уменьшить объем пьезокерамики. Уменьшить объем пьезокерамики в известном двигателе возможно за счет уменьшения высоты цилиндра вибратора, его толщины и диаметра. Однако уменьшение высоты цилиндра приводит к повышению рабочей частоты двигателя. Экспериментально установлено, что при рабочих частотах более 200 кГц фрикционный контакт работает не эффективно, в нем увеличивается потери на трение, что приводит к снижению КПД. Предельная вырота цилиндра примерно равна 10 мм. Уменьшение толщины цилиндра приводит к уменьшению ширины фрикционного контакта, к понижению прочности крепления пластинтолкателей и к усложнению технологии изготовления вибратора. Практически толщина цилиндра может быть не меньше 7 мм. Уменьшение диаметра увеличивает разницу в величине колебательных скоростей на краях пластин-толкателей. Увеличивает износ., приводит к возникновению акустических шумов и к понижению КПД. Таким образом, известный двигатель не может быть использован в маломощных устройствах, так как уменьшение мощности приводит к уменьшению КПД. Целью изобретения является расширение области применения двигателя путем обеспечения мощности при увеличении КПД. Поставленная цель достигается тем, что в пьезоэлектрическом двигателе, содержащем корпус и установленные в нем ведомый орган и полый цилиндрический пьезоэлемент с пластинами-толкателями, установленными, по крайней мере, на одной из его поверхностей и упруго прижатыми к поверхности ведомого органа, пьезоэлемент выполнен в виде вибратора продольных колебаний по длине окружности, а пластины-толкатели установлены в узлах механичес;ких напряжений. Выполнение пьезоэлемента в виде вибратора продольных колебаний по длине окружности цилиндра позволяет уменьшить высоту цилиндра без изменеЬия рабочей частоты двигателя. Висота цилиндра вибратора может быть выполнена достаточно малой. Продольмый размер высоты ограничен конструк тивнымв соображениями и требованиями по прочности вибратора. Практически высота может быть доведена до 1 мм. Частотозадающим размером является расстояние по длине окружности цилиндра между двумя осевыми узлами механических напряжений. Если сравнивать по предельному диаметру для предлагаемого двигателя и предельной высоте для прототипа, то рабочая часTofa у предлагаемого двигателя в 3,14 раз ниже рабочей частоты прототипа. Это позволяет получить более высокий КПД, так как снижаются потери натрение.. Возможность уменьшения высоты цилиндра в 10 раз позволяет в 10 раз увеличить входное сопротивление двигателя и, таким образом, уменьшить потребляемую «эщность в режиме свободного ротора. Кроме того, уменъзаение площади поперечного сечения виб- ратора (перпендикулярно направлению колебаний) позволяет уменьшить число пла ггин-толкателей и обеспечить режим максимального КПД при мэньших значениях сопротивления нагрузки. Все это 15 приводит к уменьшеншо мощности при сохранении частоты вращений и увеличении КПД.
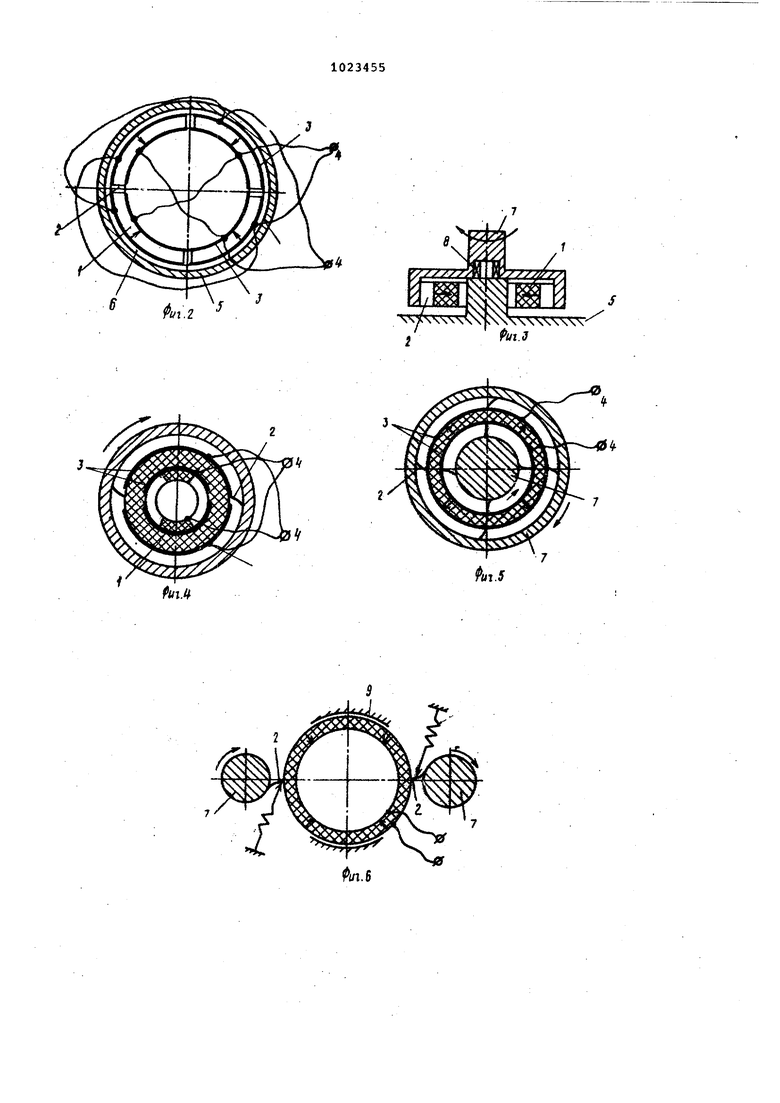
На фиг. 1 и 2 представлен двигатель, , пластины-толкатели ус- 20 тановлены на торцовых сторонах цилиндрического вибратора; на фиг. 3 и.4 - то же, толкатели установлены на внешних цилиндрических сторонах
пьезоэлементов на фиг. 5 - вибратор 25 двигателя, имеющий Ш1астинь1-толкатёли на двухЦилиндрических сторонах} на фиг. 6 - лластины-толкатели, установленые на внешних цилиндрических поверхностях пьезозлемёнтов, в аимодей- «п ствующие с двумя роторами; на .7 12 - различные конструктивные выполнения пьезоэлементов предлагаемого двигателя.
Пьезоэлектрический двигатель -(фиг. 1) содержит полый цилиндричес- КИЙ пьезоэлемент 1 с пластинами-толкателями 2, установленными на его торцовьк поверхностях. На цилиндрических поверхностях пьезоэлектрического цилиндра нанесены электроды 3, 0 которые снабжены выводами 4. Пьезо «электрический цилиндр поляризован ъ радиальном направлении (направление поляризации показано стрелками). Пьеэоэлемент 1 установлен в корпусе 545 с помощью звукоизолирукицих прокладок €. Пластины-толкатели 2 взаимодействуют с двумя роторами 7, установленньачи в подшипниках 8 в корпусе 5.
. .50
Пьезоэлектрический двигатель рабо тает следующим образом.
На выводы 4 от источника питания пьезоэлектрического двигателя (источник питания не показан) подается пе- 55 ременное электрическое напряжение, соответствуивдее по частоте четвертой |Моде колебаний по длине окружности цилиндра. В пьезоэлементе 1 начинают возбуждаться колебания четвертой
по длине окружности цилиндра вибратора 1. Пластиньг-толкатели 2 начинают смещаться вдоль окружности цилиндра, приводя во вращение роторы 7.
В двигателе, изображенном на фиг. 3 и 4, пластины-толкатели 2 расположены на внешних цилиндрических поверхноцтях цилиндрического пьезоэлемента 1, в котором возбуждается вторая мода продольных колебаний по длине окружности,. Пластины-толкатели 2 взаимодействуют с одним ротором 7, который установлен с помощью подшипника 8 на выступе корпуса 5.
Двигатель, изображенный на фиг.З, имеет два ротора 7, один из которых расположен внутри цилиндрического вибратора, другой,вьшолненный в виде кольца, охватывает вибратор. Вибратор 1 имеет сплошные электроды, а фазирование колебаний осуществляется с помощью разнонаправленной поляризации пьезоэлемента.
На фиг. 4 показан пьезоэлектрический двигатель, пьеэозлемюнт 1 которого установлен с возможностью угловых перемещений вокруг его оси и подпружинен в этом направлении. Вибратор 1 установлен в цилиндрических направляющих 9. Возбуждение в кольце продольных колебаний по окружности и возможность отвода почти всей механической энергии одним, двумя толкателями позволяет осциллятор сделать подпружиненным к ротору не за счет упругих СВОЙСТВ толкателя, а эа счет внешнего прижимного элемента. Это снимает требования к материгшу толкателя в отношении его упругих свойств. При этом толкатели можно выполнить из пластмассы и за счет этого повысить ресурс двигателя.
На показанных фиг. 7-11 возбуждается вторая мода продольных колебаний по длине окружности цилиндра. Пластины-толкатели установлены на внешних цилиндрических поверхностях. В пьезоэлементах на фиг. 7 - 10 осуществлена поперечная поляризац ия, в пьезоэлементе на фиг. 11 - продольная. В вибраторе на фиг.12 возбуждается восьмая мода колебаний по длине окружности.
Предложенный пьезоэлектрический двигатель позволяет более .чем в 10 раз уменьшить потребляемую мсхциость двигателя при сохранении частоты вращения, КПД двигателя увеличиваетс на 5-10%.
Расширен ряд двигателей с цилиндрическим вибратором в область низких мощностей на выход.
J
tX
/I.J

| название | год | авторы | номер документа |
|---|---|---|---|
| Пьезоэлектрический двигатель | 1979 |
|
SU1070628A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД | 1991 |
|
RU2044398C1 |
| Пьезоэлектрический двигатель | 1979 |
|
SU782655A1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1807548A1 |
| Пьезоэлектрический двигатель | 1974 |
|
SU1278994A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| Пьезоэлектрический двигатель | 1980 |
|
SU1023457A1 |
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |

ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГА ТЕЛЬ, содержащий корпус и установленный в нем ведомый орган и полый ця ,. линдрический пьезоэлемент.с пластина - ми-толкателями, установленными, по крайней мере, на одной из его поверхностей и упруго прижатьФ4и к поверхности ведомого органа, отличающийся тем, что, с целью расширения области применения путем обеспечения снижения мощности при увеличении КПД,пьезо9лемеит выполнен в виде вибратора продольных колебаний по длине окружности,а пластины-толкатели установлены в узлах механических напряжений. с. Г ///////А V/////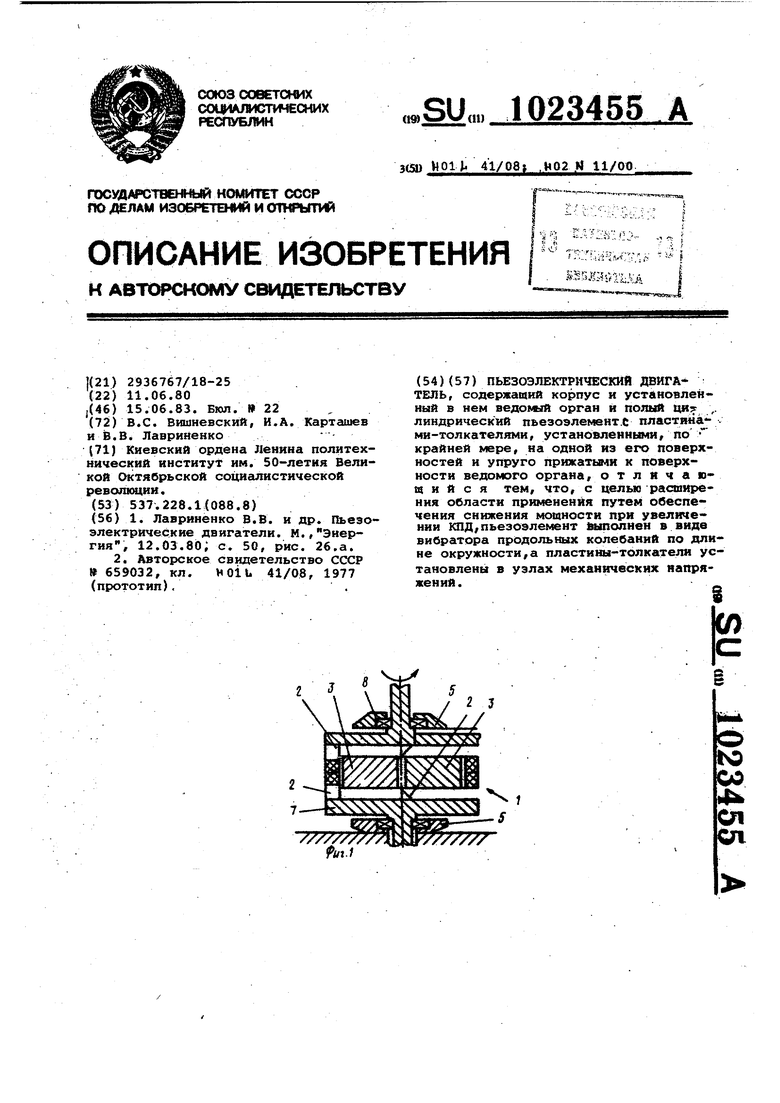
/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лавриненко В.В | |||
| и др | |||
| Пьезоэлектрические двигатели, м.,Энергия, 12.03.8d; с | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 659032, кл | |||
| Механический грохот | 1922 |
|
SU41A1 |
