Изобретение относится к электротехнике, а именно к бесконтактным электрическим машинам.
Известны бесконтактные асинхронные и синхронные электрические машины. Типичным представителем первых является асинхронный электродвигатель с короткозамкнутым ротором [1]. Представителем вторых являются синхронные электродвигатели и генераторы с бесщеточной системой возбуждения [2]. Плавное регулирование частоты вращения таких двигателей осуществляется изменением частоты питающего тока, для чего применяются сложные и дорогостоящие системы управления и регулирования на базе применения преобразователей частоты. Это снижает экономическую эффективность применения регулируемых электродвигателей и надежность работы электроприводов.
Известны регулируемые бесконтактные электродвигатели постоянного тока [3] . Для регулирования частоты вращения таких электродвигателей применяются сложные дорогостоящие системы управления, содержащие тиристорные коммутаторы и устройства контроля положения якоря. Это ограничивает область применения таких электродвигателей.
Известны управляемые асинхронные электродвигатели с полым ротором, содержащие обмотки управления и обмотки возбуждения [4,5]. Устройства для регулирования частоты вращения таких электродвигателей более просты и менее дороги по сравнению с преобразователями частоты и системами управления бесконтактными электродвигателями постоянного тока. Однако такие электродвигатели создаются на малые мощности преимущественно для приборостроения, автоматики и телемеханики.
Наиболее близким к предлагаемому изобретению является бесконтактный синхронный генератор с внутризамкнутым магнитным потоком и двусторонней системой возбуждения, изображенной на рис. 7.19 стр. 251 в работе [5]. Он содержит статор с обмоткой, неподвижное устройство возбуждения с двумя кольцевыми обмотками, размещенными около щитов, и ротор, содержащий две полюсные системы. Одна полюсная система представляет собой цилиндр с полюсными выступами одной полярности, магнитосвязанными между собой, вторая - полый цилиндр с отверстиями, в котором роль полюсов противоположной полярности выполняют магнитосвязанные участки полого цилиндра, распложенные между отверстиями. Полюсные выступы первой системы размещены в отверстиях второй системы. Промежутки между выступами первой системы и стенками отверстий второй системы заполнены немагнитопроводящим материалом. Полюсные системы размещаются между рабочими поверхностями устройства возбуждения и статора. Каждая полюсная система проводит магнитный поток неизменного направления, создаваемый соответствующей обмоткой системы возбуждения. При подключении обмотки статора к источнику переменного тока, а обмоток возбуждения - к источнику постоянного тока машина работает в режиме синхронного электродвигателя. Плавное регулирование частоты вращения такого двигателя возможно с применением сложного и дорогостоящего преобразователя частоты электрического тока, питающего обмотку статора, что ограничивает область применения таких электродвигателей.
Целью настоящего изобретения является расширение эксплуатационных возможностей бесконтактных электрических машин.
Указанная цель достигается тем, что предлагаемая электрическая машина содержит корпус, статор с электрической обмоткой, аналогичной обмоткам статоров асинхронных и синхронных машин переменного тока - петлевой или волновой, переменнополюсный индуктор с обмоткой возбуждения или с постоянными магнитами, и ротор, активные части которого размещаются в зазоре между рабочими поверхностями статора и индуктора. Число полюсов индуктора и число полюсов, создаваемых обмоткой статора, равны между собой.
В активной части ротора установлены магнитопроводящие элементы из магнитно-мягких материалов, разделенные между собой гальванически несвязанными немагнитопроводящими элементами; рабочие поверхности одного и того же магнитопроводящего элемента расположены у рабочей поверхности индуктора и у рабочей поверхности статора; сумма значений ширины магнитопроводящих элементов, находящихся на участке ротора длиной, равной длине промежутка между концами двух рядом расположенных магнитных полюсов индуктора, меньше расстояния между концами этих полюсов; сумма значений ширины немагнитопроводящих элементов, находящихся на этом участке ротора, больше суммы значений зазоров между рабочими поверхностями магнитного полюса индуктора и ротора, ротора и статора; активные проводники обмотки статора размещены только на участках, расположенных против рабочих поверхностей магнитных полюсов индуктора.
По конструктивному исполнению заявляемая машина может быть: с полым ротором и концентрическим размещением рабочих поверхностей статора, ротора и индуктора одна по отношению к другой или с соосным размещением статора и индуктора, когда их рабочие поверхности охватывают рабочую поверхность активной части ротора.
Машина с концентрическим размещением рабочих поверхностей статора, ротора и индуктора может быть выполнена:
с наружным расположением статора и внутренним расположением индуктора;
с наружным расположением индуктора и внутренним расположением статора.
Машина может быть выполнена также с плоскими рабочими поверхностями статора, ротора и индуктора.
Машина может быть выполнена с креплением статора к корпусу, позволяющим поворачивать статор относительно оси вращения ротора, и жестким креплением индуктора к корпусу или с креплением индуктора к корпусу, позволяющим поворачивать индуктор относительно оси вращения ротора, и жестким креплением статора к корпусу.
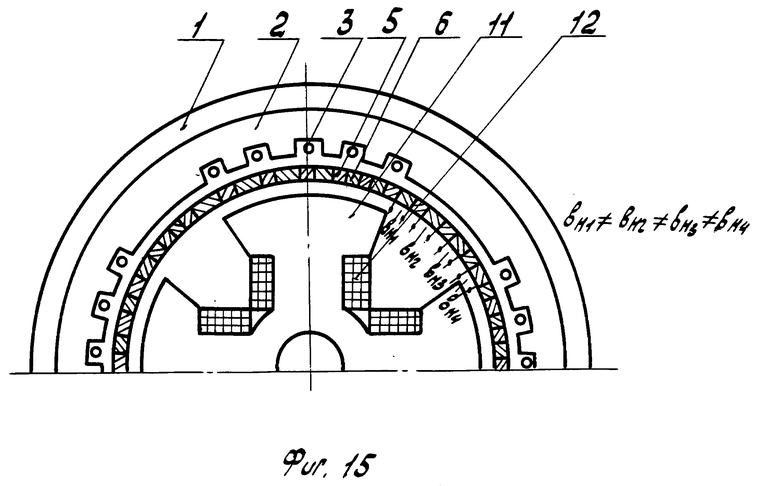
Машина может быть выполнена с одинаковой шириной немагнитопроводящих элементов, размещаемых в роторе, с постоянным значением зазора между поверхностями ротора и магнитных полюсов индуктора, расположенных около ротора, и различными расстояниями между концами рядом расположенных магнитных полюсов индуктора.
Машина может быть выполнена с одинаковой шириной немагнитопроводящих элементов, размещаемых в роторе, с одинаковыми расстояниями между концами рядом расположенных магнитных полюсов индуктора и переменным значением зазора между поверхностями ротора и полюсов индуктора на участках полюсных дуг.
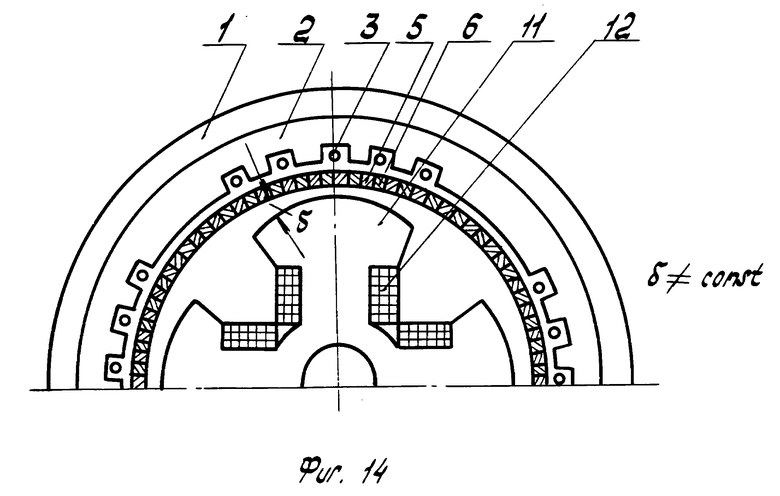
Машина может быть выполнена с одинаковым зазором между поверхностями ротора и полюсов индуктора и расстояниями между концами рядом расположенных полюсов индуктора и неодинаковыми значениями ширины немагнитопроводящих элементов, размещаемых на роторе.
Программное регулирование частоты вращения двигателя осуществляется изменением значения напряжения, подводимого к обмотке статора или к обмотке индуктора, или к обеим обмотам одновременно или поворотом индуктора или статора относительно корпуса. Естественное изменение частоты вращения обеспечивается приданием необходимого наклона естественной механической характеристике.
Существенными отличительным признаками, достаточными во всех случаях, являются:
отделение каждого магнитопроводящего элемента в активной части ротора друг от друга немагнитопроводящими элементами, причем немагнитопроводящие элементы разделены между собой гальванически;
сумма значений ширины магнитопроводящих элементов, расположенных на участке ротора, длина которого равна расстоянию между концами двух рядом расположенных магнитных полюсов индуктора, меньше длины этого участка ротора;
сумма значений ширины немагнитопроводящих элементов, расположенных на этом участке ротора, больше суммы значений зазоров между рабочими поверхностями магнитного полюса индуктора и ротора, ротора и статора;
размещение активных проводников статора только на тех участках статора, которые расположены напротив рабочих поверхностей магнитных полюсов индуктора.
Реализация этих признаков обеспечивает:
неизменность заданного направления сил, приложенных к магнитопроводящим элементам активной части ротора, создаваемым результирующим магнитным потоком, образующимся от взаимодействия магнитных потоков обмоток статора и индуктора и пронизывающим магнитопроводящие элементы ротора, что дает возможность питания заявляемой машины постоянным током, однофазным или многофазным переменным током для работы машины в двигательном и тормозном режимах и отказаться от применения традиционного в коллекторных машинах постоянного и переменного тока пластинчатого коллектора со щеточным контактным токосъемным узлом; улучшение использования материала обмотки статора.
Признаками, характеризующими машину в конкретных случаях исполнения, являются:
размещение статора, индуктора и ротора в корпусе машины таким образом, что рабочие поверхности статора и индуктора соосны и охватывают наружную рабочую поверхность активной части ротора;
размещение статора, индуктора и полого ротора в корпусе машины таким образом, что у рабочих поверхностей статора и индуктора концентрично размещены внутренняя и наружная рабочие поверхности активной части ротора:
параллельное соединение обмоток индуктора и статора;
последовательное соединение обмоток индуктора и статора;
размещение концевых участков магнитопроводящих и немагнитопроводящих элементов на поверхности зубчатых немагнитопроводящих колец, наличие у магнитопроводящих и немагнитопроводящих элементов в местах соприкосновения с зубчатыми кольцами вырезов, в которые входят участки зубчатых колец; наклон концевых кромок коротких сторон магнитопроводящих и немагнитопроводящих элементов к центру машины: скрепление зубчатых колец с немагнитопроводящими шайбами, скрепление шайб с дисками, скрепление дисков с валом машины, наличие слоя электроизоляционного материала между сопрягающимися поверхностями магнитопроводящих и немагнитопроводящих элементов зубчатых колец и шайб;
жесткое сочленение статора с корпусом и сочленение индуктора с корпусом, дающее возможность его периодического поворота относительно оси вращения ротора;
жесткое сочленение индуктора с корпусом и сочленение статора с корпусом, дающее возможность его периодического поворота относительно оси вращения ротора;
плоские формы рабочих поверхностей статора, ротора и индуктора: неодинаковые расстояния между рядом расположенными магнитными полюсами индуктора:
переменное значение зазора между поверхностями ротора и магнитных полюсов индуктора;
неодинаковая ширина немагнитопроводящих элементов, размещаемых в роторе.
Реализация этих признаков в частных случаях обеспечивает получение свойств и характеристик, необходимых для применения машины в конкретных условиях.
Соосное размещение рабочих поверхностей статора и индуктора, охватывающих рабочие поверхности активной части ротора, дает возможность уменьшить поперечные размеры машины; концентрическое размещение рабочих поверхностей статора, индуктора, внутренней и наружной рабочих поверхностей полого ротора дают возможность уменьшить осевую длину машины; последовательное соединение обмоток статора и индуктора обеспечивает получение мягкой естественной механической характеристики машины; параллельное соединение обмоток обеспечивает получение жестких естественных механических характеристик. Сочленение статора или индуктора с корпусом машины, обеспечивающее возможность их поворота вокруг оси вращения ротора, дает возможность регулирования частоты вращения путем изменения взаимного положения осей полюсов индуктора и обмотки статора. Сочленение магнитопроводящих и немагнитопроводящих элементов с валом машины через зубчатые кольца, шайбы и диски, гальваническое разделение немагнитопроводящих элементов между собой позволяет набрать из элементов малой ширины полый цилиндрический ротор и снизить потери мощности в нем. Плоские рабочие поверхности статора, индуктора и ротора обеспечивают возможность создания машины с поступательным перемещением ротора. Неодинаковое значение расстояний между краями магнитных полюсов индуктора, ширины немагнитопроводящих элементов, размещаемых в роторе, зазоры между поверхностями ротора и магнитных полюсов индуктора обеспечивают возможность согласования механических характеристик электродвигателя с требованиями приводимой в движение нагрузки.
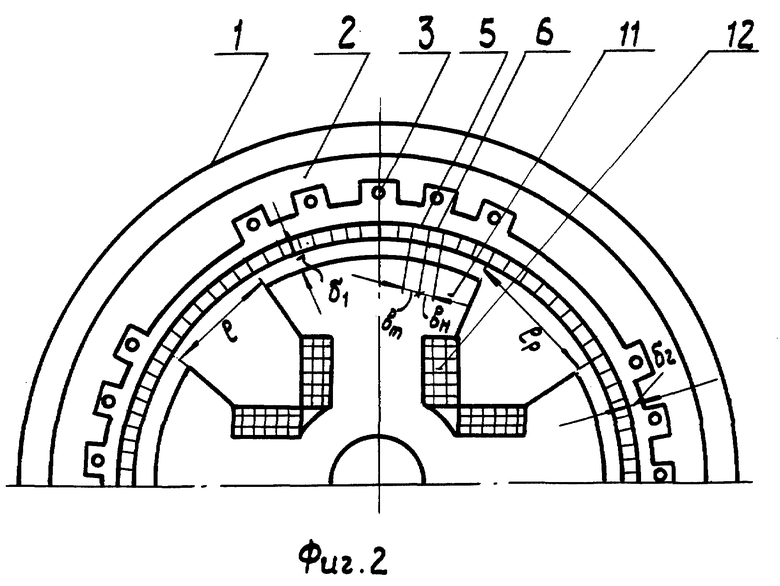
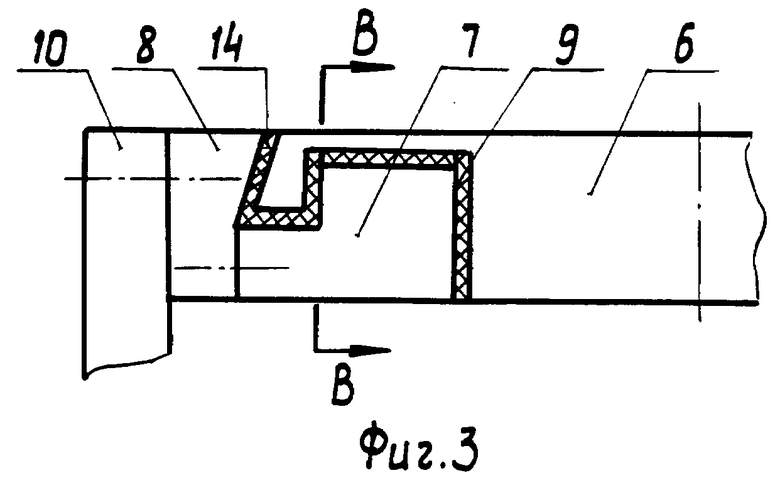
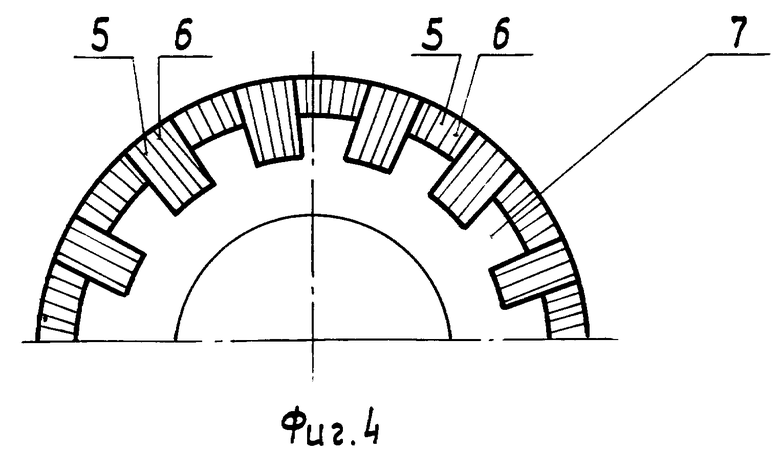
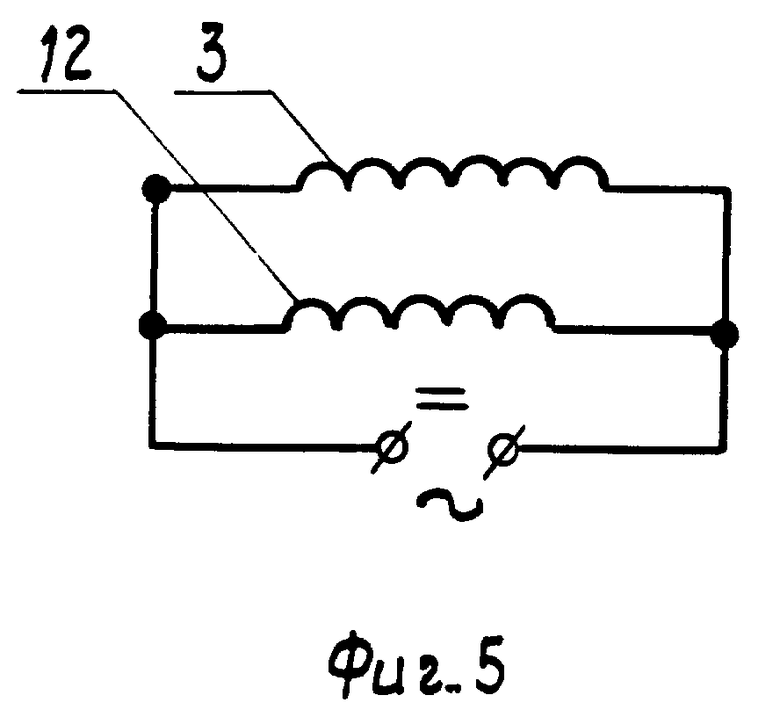
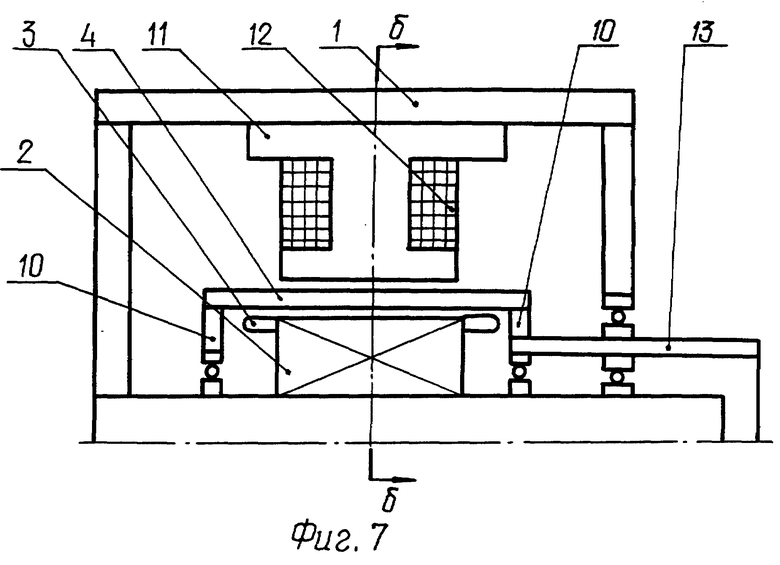
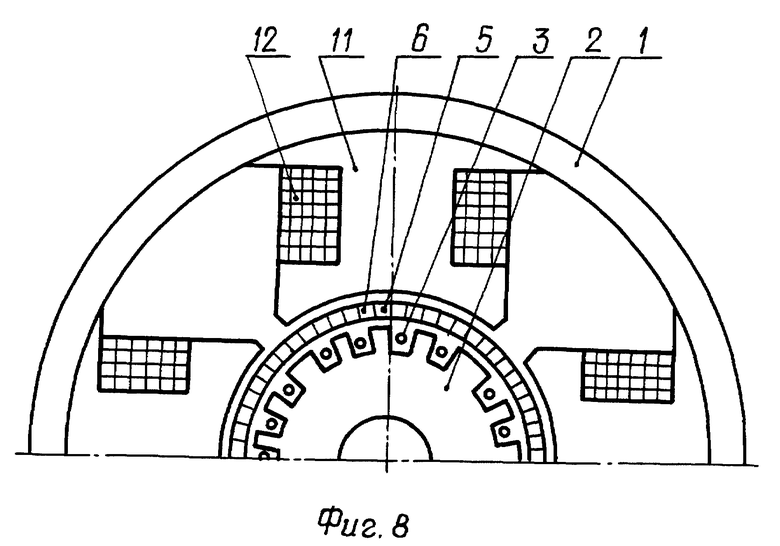
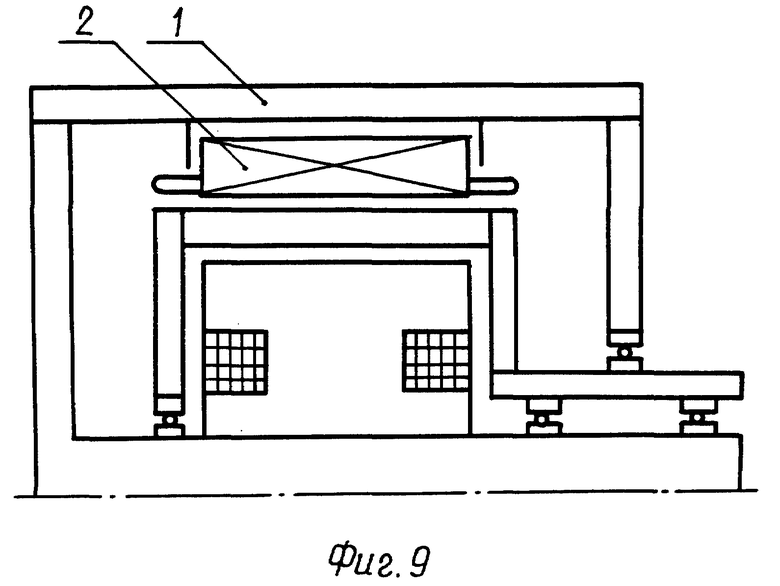
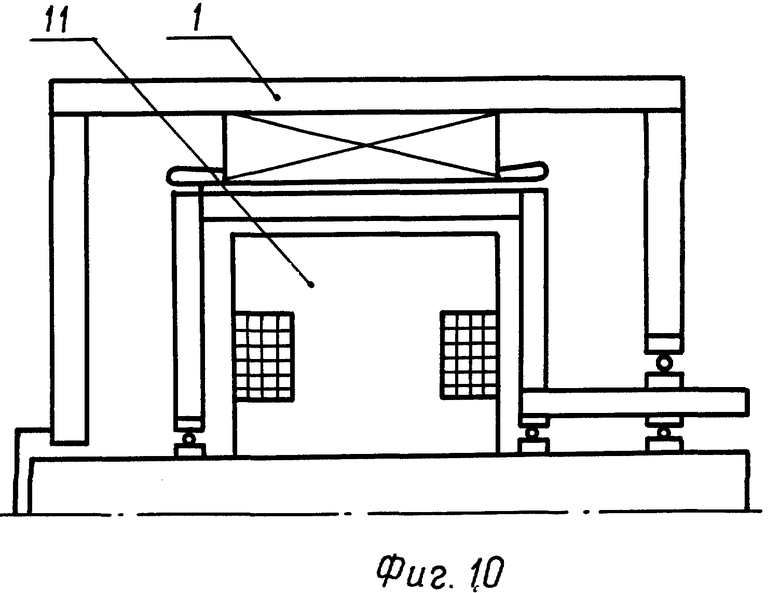
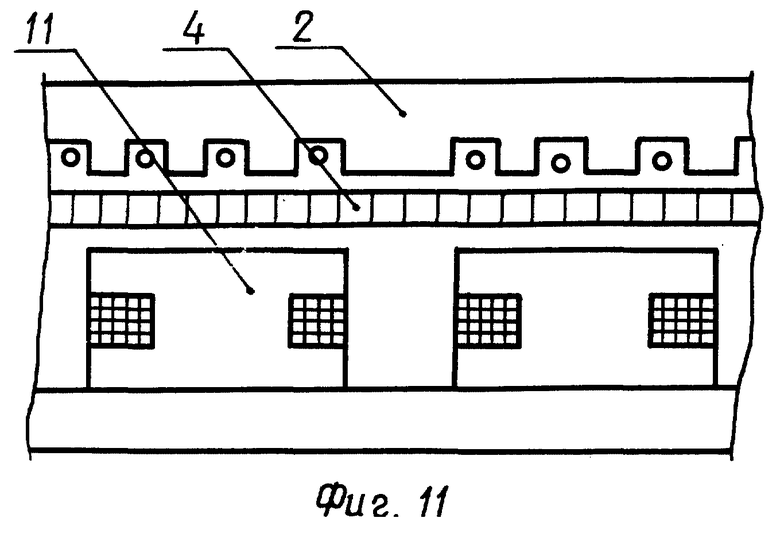
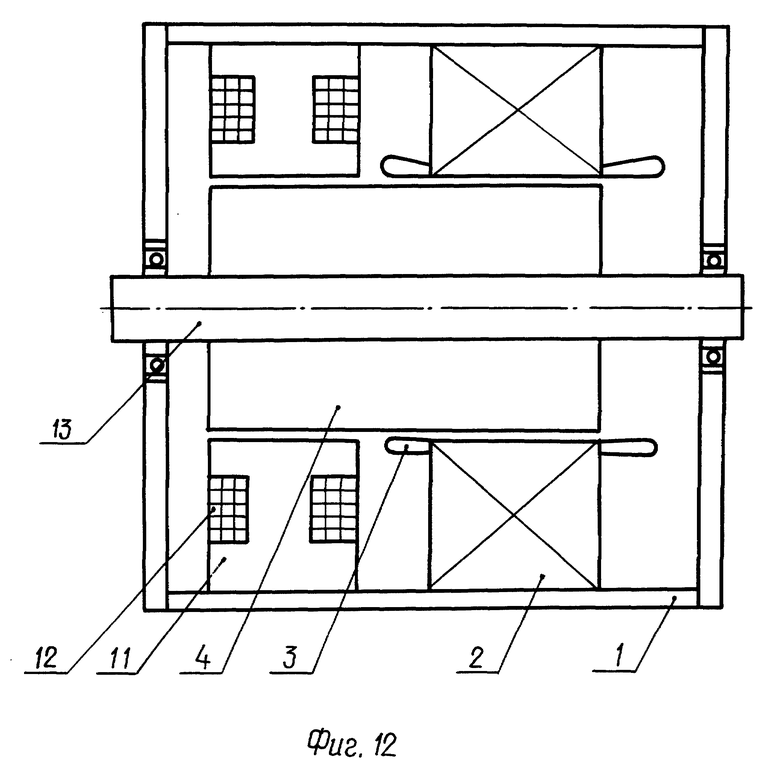
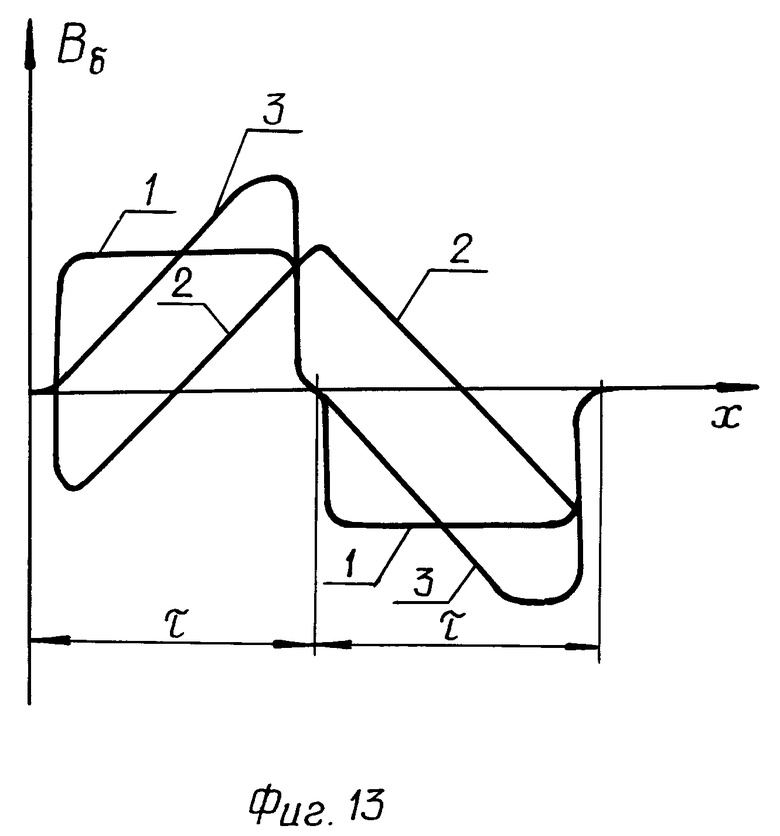
На фиг. 1 изображена конструктивная схема бесконтактной электрической машины с полым ротором, внешним расположением статора и внутренним расположением индуктора; на фиг. 2 изображен поперечный разрез машины по а- а; на фиг. 3 - сочленение магнитопроводящих и немагнитопроводящих элементов активной части ротора с зубчатым кольцом, шайбой и дисками, передающими усилия вращения валу машины; на фиг. 4 - разрез машины по в-в: на фиг. 5 - схема параллельного соединения обмоток статора и индуктора; на фиг. 6 - схема последовательного соединения обмоток статора и индуктора; на фиг. 7 - конструктивная схема бесконтактной машины с полым ротором, с внешним расположением индуктора и внутренним расположением статора; на фиг. 8 - поперечный разрез по б-б; на фиг. 9 - конструктивная схема машины с жестким креплением индуктора к корпусу и креплением статора, дающим возможность его поворота относительно оси вращения ротора; на фиг. 10 - конструктивная схема машины с жестким креплением статора к корпусу машины и возможностью поворота индуктора относительно оси вращения ротора; на фиг. 11 - конструктивная схема машины с плоскими рабочими поверхностями статора, индуктора и ротора; на фиг. 12 - конструктивная схема машины с соосным расположением статора и индуктора, обеспечивающим охват их рабочими поверхностями рабочей поверхности ротора; на фиг. 13 - график распределения индукции магнитного потока в промежутке между поверхностями магнитных полюсов индуктора и статора вдоль зазора; фиг. 14 - поперечный разрез машины по а-а на фиг. 1 в варианте с неодинаковой шириной немагнитопроводящих элементов, размещаемых на роторе: фиг. 15 - поперечный разрез машины по а-а на фиг. 1 в варианте с переменной величиной зазора между рабочими поверхностями полюсов индуктора и ротора.
Конструктивная схема предлагаемой электрической машины в варианте с полым ротором с наружным расположением статора и внутренним расположением индуктора по отношению к активной части ротора приведена на фиг. 1, 2, 3, 4.
Машина содержит корпус 1, статор 2 с распределенной петлевой или волновой обмоткой 3, полый ротор 4 с магнитопроводящими элементами 5 из магнитно-мягких материалов, немагнитопроводящими элементами 6, немагнитопроводящими кольцами 7, шайбами 8, изоляционным слоем 9, дисками 10, индуктор 11 с обмоткой 12, вал 13. Число магнитных полюсов индуктора 11 равно числу полюсов, создаваемых обмоткой статора 3. Поперечное сечение магнитопроводящих элементов 5 прямоугольное с шириной bm. Поперечное сечение немагнитороповодящих элементов 6 сегментное, ограниченное двумя дугами разного радиуса, больший из которых соответствует дуге у рабочей поверхности статора. Ширина немагнитопроводящего элемента, измеренная по хорде меньшей дуги, равна bн. Возможно и другое исполнение ротора - с прямоугольным поперечным сечением немагнитопроводящих элементов с шириной bн и сегментным поперечным сечением магнитопроводящих элементов с шириной bm по хорде меньшей дуги. Предпочтительное исполнение - с прямоугольным сечением магнитопроводящих элементов с шириной bm. На участке ротора 4 длиной l равной расстоянию lm между крайними точками двух рядом расположенных магнитных полюсов индуктора 11, т.е. при l = lm, расположено nm магнитопроводящих элементов и nn немагнитопроводящих элементов. Значения bm, bн, l, lm, nm, n выбираются так, чтобы удовлетворялись следующие условия: сумма значений ширины bm числа nm магнитопроводящих элементов 5, расположенных на участке ротора 4, длина которого l равна расстоянию lm между крайними точками двух рядом расположенных магнитных полюсов индуктора 11, меньше длины этого участка ротора, т.е. bmnm<1; сумма значений ширины bн числа nн немагнитопроводящих элементов 6, расположенных на этом же участке ротора длиной l, больше суммы значений зазоров между рабочей поверхностью магнитного полюса индуктора 11 и ротора 4 - δ1, ротора 4 и статора 2 - δ2, т.е. bнnн > δ1+δ2.
Участки магнитопроводящих и немагнитопроводящих элементов 5 и 6 за пределами индуктора 11 входят в пазы немагнитопроводящих зубчатых колец 7; магнитопроводящие 5 и немагнитопроводящие 6 элементы на сторонах, обращенных к индуктору 11, имеют вырезы, в которые входят участки зубчатых колец 7, зубчатые кольца 7 соединены с немагнитопроводящими шайбами 8, последние соединены с дисками 10, укрепленными на полом вале машины 13. Концевые кромки 14 коротких сторон магнитопроводящих элементов 5 и немагнитопроводящих элементов 6 наклонены к центру машины смещением точек на большем радиусе.
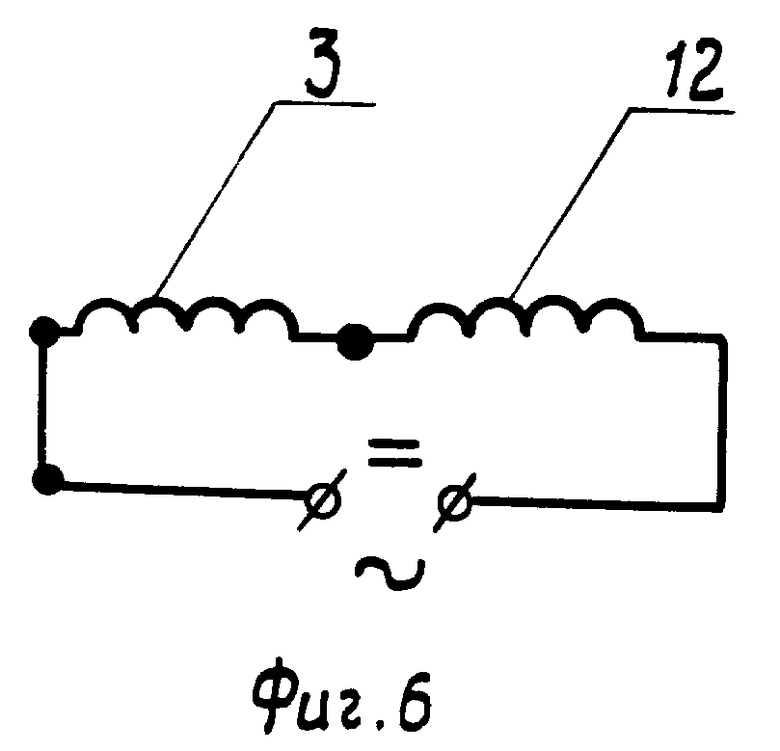
Обмотки статора 3 и индуктора 12 подключаются или к сетям постоянного тока, или к однофазным или к многофазным сетям переменного тока. Машина может работать в режимах двигателя или генератора. Для получения жестких естественных механических характеристик двигателя обмотки статора 3 и индуктора 12 между собой соединяются параллельно (фиг.5), для получения мягких естественных механических характеристик обмотки статора 3 и индуктора 12 соединяются последовательно (фиг.6). По схемам, приведенным на фиг.5-6, соединяются обмотки статора и индуктора машин постоянного тока или одна фаза обмоток статора и индуктора машин переменного тока.
В машинах постоянного тока вместо обмотки 12 индуктора 11 могут устанавливаться постоянные магниты.
Машина с полым ротором и концентричным расположением рабочих поверхностей статора 2, индуктора 11 и ротора 4 может иметь исполнения с внешним по отношению к рабочей поверхности ротора 4 расположением статора 2 и внутренним расположением индуктора 11 (фиг.1, 2) или с внешним расположением индуктора 11 и внутренним расположением статора 2 (фиг.7, 8).
Для регулирования частоты вращения ротора путем смещения магнитной оси полюса индуктора относительно магнитной оси полюса обмотки статора статор 2 или индуктор 11 сочленяются с корпусом 1 с возможностью поворота статора 2 (фиг.8) или индуктора 11 (фиг. 10) относительно оси вращения ротора.
Рабочие поверхности пакета статора, ротора и индуктора могут иметь и плоскую форму (фиг. 11). В этом случае ротор совершает линейные возвратно-поступательные или непрерывные движения.
Машина с цилиндрическим ротором может иметь исполнение (фиг. 12), когда статор 2 и индуктор 11 укреплены в корпусе 1 таким образом, что их рабочие поверхности соосны и охватывают рабочую поверхность ротора 4.
Активные проводники обмотки 2 статора 3 во всех вариантах исполнения размещаются только на участках статора, находящихся против рабочих поверхностей магнитных полюсов индуктора.
Для работы электрической машины в режиме двигателя к обмоткам статора 3 и индуктора 12 подводится напряжение от источника питания.
Обмотка полюса индуктора 11 и распределенная обмотка статора 3 совместным действием при обтекании их током образуют в пространстве между рабочими поверхностями полюсов индуктора и статора результатирующий магнитный поток [6] . Поток пересекает магнитопроводящие элементы ротора и возбуждает в них механические усилия, стремящиеся перемещать магнитопроводящие элементы вдоль воздушного зазора между рабочими поверхностями статора и полюсов индуктора в направлении возрастания магнитной индукции результирующего магнитного потока. На фиг. 13 приведены графики распределения вдоль зазора индукции потока, создаваемого обмоткой полюса индуктора 1, распределенной обмоткой статора 2 и результирующего потока 3.
Взаимное расположение обмотки статора и поверхностей полюсов индуктора обеспечивает такое распределение индукции вдоль зазора, при котором на большем участке полюсного деления индукция возрастает и пересекает большую часть магнитопроводящих элементов в сравнении с длительностью участка полюсной дуги, на котором индукция результирующего потока уменьшается до нуля. Это обеспечивает превышение суммарного усилия втягивания магнитопроводящих элементов в зону максимальной индукции над суммарным усилием удерживания магнитопроводящих элементов в этой зоне. Разница усилий втягивания и удерживания обеспечивает создание вращающего момента, приводящего во вращение ротор 1, диски 10, вал 13. В период нахождения магнитопроводящего элемента в промежутки между разнополярными полюсами индуктора элемент размагничивается. В период нахождения его в зоне полюса другой полярности он подвергается действию усилий неизменного направления.
Процесс энергопреобразования в период движения ротора обуславливается изменением значения магнитного потока, пронизывающего магнитопроводящие элементы в период перемещения их в пределах полюсной дуги фиг. 13 от точки с индукцией результатирующего потока, равной нулю, до точки с максимальным значением индукции. Процесс изменения потока обеспечивается притоком электрической энергии из источника питания обмотки статора и индуктора и обуславливает появление в обмотках противоэлектродвижущей силы.
Процесс энергопреобразования в период пуска электродвигателя обеспечивается изменением значения тока в обмотках статора и (или) индуктора традиционными методами - изменением значения напряжения питания или активного сопротивления цепи питания обмотки, а также изменением значения магнитного потока, пронизывающего магнитопроводящие элементы, перемещающиеся в зону большой индукции.
Направление перемещения ротора определяется направлением тока в обмотке статора 3 и направлением магнитного потока в полюсах индуктора 11. Изменением направления тока в обмотке индуктора 12 или в обмотке статора 3 изменяется направление движения ротора.
Частота вращения ротора регулируется изменением значения тока в обмотке статора 3 или в обмотке индуктора 12, или в обеих обмотках одновременно. Частота вращения может регулироваться поворотом статора 2 (фиг.9) относительно корпуса 1 при неизменном положении индуктора 11 или поворотом индуктора 11 (фиг. 10) относительно корпуса 1 при неизменном положении статора 2.
Для работы в режиме генератора ротор 4 приводится в движение от внешнего источника энергии, магнитный поток в полюсах индуктора 11 наводится или обмоткой 12, обтекаемой током, или постоянными магнитами. Перемещение магнитопроводящих элементов 5 относительно обмотки статора 12 индуцирует в последней электродвижущую силу.
Заявляемая машина обладает технико-экономическими преимуществами в сравнении с применяемыми в настоящее время коллекторными машинами.
Отсутствие щеточно-коллекторного узла со скользящим контактом снизит эксплуатационные расходы на обслуживание электрической машины при применении ее в приводах, где традиционно применяются коллекторные машины постоянного и переменного тока; снимет ограничения по перегрузочной способности, обусловливаемые коммутационными процессами на коллекторах; снимет ограничения на уровень питающего напряжения; повышает надежность и безопасность работы электрических машин во взрыво-пожароопасных установках.
Заявляемая машина может быть применена в установках колесного и бесколесного транспорта - электровозы, трамваи, троллейбусы, конвейеры, подъемные краны; в установках со сложными режимами работы - экскаваторы, прокатные станы, буровые и рудничные подъемные установки; на подводных и надводных установках, питаемых от аккумуляторных батарей.
Перечень использованных источников:
1. Проблема бесконтактности электрических машин.- В кн.: Штурман Г.И., Аспит В. В.Крогрис А.Ф. Бесконтактные электрические машины.- Изд-во АН Латвийской ССР, Рига, 1961.
2. Бесколлекторные регулируемые электрические машины.- Сб. научных трудов ВНИИэлектромаш, Ленинград, 1988.
3. Дубенский А.А. Бесконтактные двигатели постоянного тока.- М.: Энергия, 1967.
4. Чечет Ю.С. Управляемый асинхронный двигатель с полым ротором.- М.-Л.: Госэнергоиздат, 1955.
5. Специальные электрические машины / под ред. А.И.Бертинова.- М.: Энергоиздат, 1982.
6. Сергеев П.С. Электрические машины. М.- Л.: Госэнергоиздат, 1962.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 2008 |
|
RU2362259C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2009 |
|
RU2392723C1 |
| РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ПОЛЮСНЫМ ЗУБЧАТЫМ ИНДУКТОРОМ | 2011 |
|
RU2478250C1 |
| Магнитоэлектрический генератор | 2018 |
|
RU2697812C2 |
| Гибридная силовая установка | 2019 |
|
RU2704665C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2019 |
|
RU2727956C1 |
| ОДНОФАЗНЫЙ БЕСКОНТАКТНЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2009 |
|
RU2393615C1 |
| БЕСКОНТАКТНЫЙ КОГТЕОБРАЗНЫЙ ГЕНЕРАТОР | 2001 |
|
RU2194350C1 |
| ПАКЕТ ДЛЯ ФОРМИРОВАНИЯ МАГНИТНОЙ СИСТЕМЫ РОТОРА | 2003 |
|
RU2236739C1 |
| Электромеханический преобразователь вентильного электродвигателя | 1987 |
|
SU1626308A1 |
Изобретение относится к электротехнике, а именно к бесконтактным электрическим машинам, и может быть использовано в качестве электродвигателя для приведения в движение технологических рабочих машин и транспортных установок, работающих с изменяющимися значениями нагрузок и скоростей движения, а также в качестве генератора, работающего в окружающих средах с высокой влажностью, запыленностью, с содержанием химически агрессивных веществ. Технический результат от использования изобретения состоит в расширении эксплуатационных возможностей бесконтактных электрических машин, а также в улучшении использования их активных материалов. Машина содержит корпус 1, статор 2 с обмоткой 3, ротор 4 с магнитопроводящими элементами 5, которые отделены друг от друга немагнитопроводящими элементами 6. Активные проводники обмотки статора размещены на участках, расположенных против рабочих поверхностей полюсов индуктора. Магнитопроводящие и немагнитопроводящие элементы разделены между собой гальванически. При этом сумма значений ширины магнитопроводящих элементов, расположенных на участке ротора, длина которого равна расстоянию между концами двух рядом расположенных магнитных полюсов индуктора, меньше длины этого участка ротора, сумма значений ширины немагнитопроводящих элементов, расположенных на этом участке ротора, больше суммы значений зазора между рабочими поверхностями магнитного полюса индуктора и ротора, ротора и статора, активные проводники обмотки статора размещены только на тех участках статора, которые расположены против рабочих поверхностей магнитных полюсов индуктора. 11 з.п. ф-лы, 15 ил.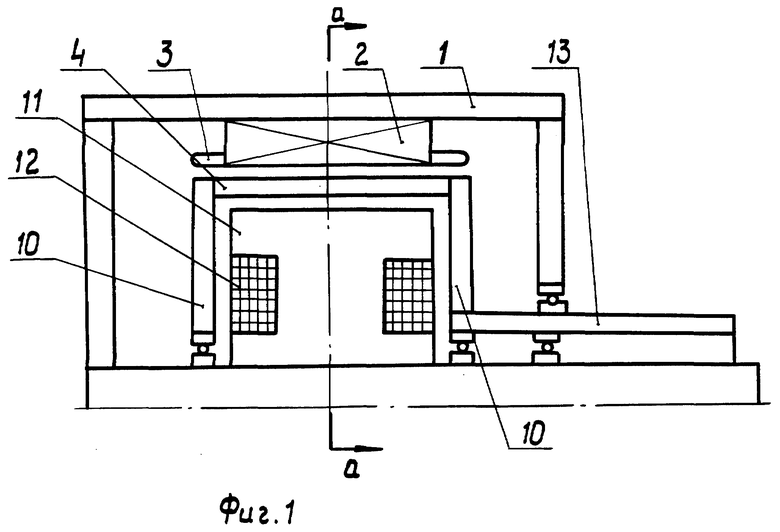
| Бертинов А.И | |||
| Специальные электрические машины | |||
| - М.: Энергоиздат, 1982, с.251, рис.7.19 | |||
| Бесконтактная электрическая машина постоянного тока | 1986 |
|
SU1387123A2 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| Электродвигатель постоянного тока | 1983 |
|
SU1089724A1 |
| Катализаторная сетка (варианты) | 2024 |
|
RU2838713C1 |
| US 4099104 A, 04.07.78. | |||

