Предлагаемое изобретение относится к области электротехники, в частности, к электрическим машинам индукторно-реактивного типа, используемых в качестве электроприводов.
Известен вентильно-индукторный реактивный двигатель, содержащий индуктор с шихтованным магнитопроводом с полюсными выступами, охваченными фазными катушками возбуждения с вентильными коммутаторами для поочередного подключения катушек фаз к источнику постоянного тока, и якорь, установленный с возможностью рабочего перемещения относительно индуктора и снабженный магнитопроводом с полюсными выступами, и в котором магнитопроводы индуктора и якоря выполнены в виде автономных С-образных сердечников с полюсными выступами, расположенных поперек направления относительно рабочего перемещения индуктора и якоря (см., например, патент RU 2159494 С1, опубл. 20.11.2000 г.).
Недостатками данного технического решения является довольно большая удельная масса, а также пониженный пусковой момент и сохраняющийся относительно высокий уровень пульсаций момента.
Известен трехфазный реактивный индукторный двигатель, содержащий зубчатый ротор без обмоток и статор с зубцами (полюсами) и размещенными на них обмотками, в котором добиваются пониженных пульсаций момента за счет выполнения зубцового слоя с разной шириной зубцов ротора и статора, с разными ширинами основания и коронки зубцов статора, взаимных скосов зубцов ротора и статора и выполнения числа зубцов на статоре - 12, а на роторе - 8 (см., например, патент RU 2153218 С1, опубл. 20.07.2000 г.).
Недостатками данного технического решения является довольно сложная конструкция и, соответственно, сложность в изготовлении (взаимный скос зубцов ротора относительно зубцов статора и сложная конфигурация профиля зубцов статора).
Известен вентильный индукторно-реактивный двигатель, содержащий безобмоточный ротор с зубцами и статор, зубцы (полюса) которого охвачены катушками и размещены так, что образована m-фазная система, при этом выполняют число зубцов на статоре Zc=k×2m (то есть кратным 2m), число зубцов ротора Zp=Zc=±k, где k=2, 3, 4 … и в зависимости от размещения катушек m-фазных обмоток определяется направление магнитодвижущих сил катушек (см., например, патент 2352048 С1, опубл. 10.04.2009 г.) - прототип.
Недостатками этого технического решения является необходимость изменения настроек системы управления при изменении величины к и недостаточное снижение массо-габаритных показателей двигателя.
Предлагаемое изобретение решает задачу создания простого, надежного и малогабаритного электродвигателя.
Для достижения указанного технического результата предлагаемый электродвигатель, содержащий статор с охваченными фазными обмотками зубцами (полюсами), размещенный внутри статора или вокруг него безобмоточный ротор с зубцами (полюсами) и с датчиком положения ротора (или без него), корпус с крышками и блоки управления (один или несколько), согласно изобретению включает к фазных обмоток, при этом число зубцов на статоре Zc=6k и на роторе Zp=5k, где k=1,2,3,4,5,6…, причем ширины статорных и роторных зубцов равны, отношение ширин статорных зубцов и впадин между ними равно 1:1, а отношение ширин роторных зубцов и впадин между ними равно 3:4,
при этом возможно, что при k=2 и более обмотки подключены к блоку управления параллельно, причем возможно их подключение от одного блока управления или от нескольких отдельных, синхронизированных между собой, блоков управления,
возможно также, что при k=2 и более обмотки подключены к блоку управления последовательно,
возможно также, что обмотки подключены к блоку управления посредством раздельных ключей верхнего и нижнего уровня.
Отличительными признаками предлагаемого электродвигателя является то, что включает к фазных обмоток, при этом число зубцов на статоре Zc=6k и на роторе Zp=5k, где k=1,2,3,4,5,6…, причем ширины статорных и роторных зубцов равны, отношение ширин статорных зубцов и впадин между ними равно 1:1, а отношение ширин роторных зубцов и впадин между ними равно 3:4,
при этом возможно, что при k=2 и более обмотки подключены к блоку управления параллельно, причем возможно их подключение от одного блока управления или от нескольких отдельных, синхронизированных между собой, блоков управления,возможно также, что обмотки подключены к блоку управления последовательно,
возможно также, что обмотки подключены к блоку управления посредством раздельных ключей верхнего и нижнего уровня.
Предлагаемое изобретение можно проиллюстрировать с помощью чертежей и схем, на которых показаны:
- фиг. 1, 2 - вариант конструкции предлагаемого электродвигателя (продольный и поперечный разрезы).
- фиг. 3 - выноска элемента «зубцового слоя» электродвигателя
- фиг. 4 - вариант конструкции (другой) электродвигателя.
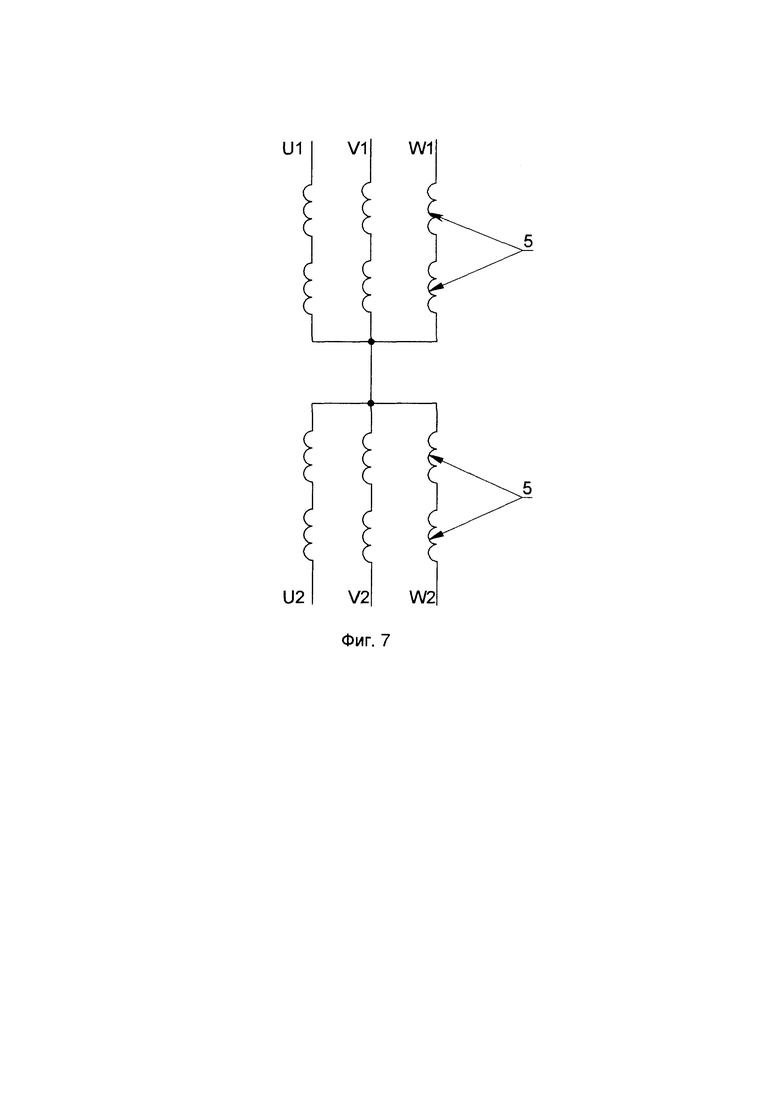
- фиг. 5, 6, 7 - варианты схем подключения фазных обмоток.
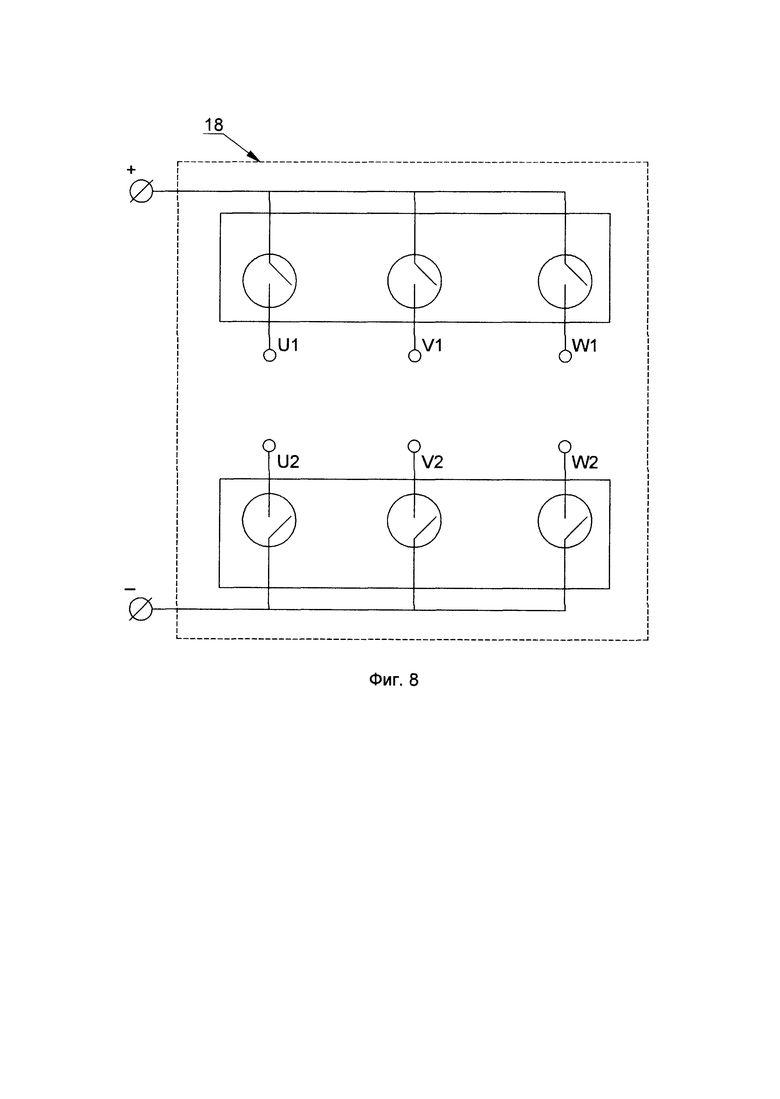
- фиг. 8 - схема коммутатора с раздельными ключами верхнего и нижнего уровня.
В закрытом крышкой 1 корпусе 2 (см. фиг. 1, 2) размещен статор 3, на зубцах (полюсах) 4 которого размещены фазные обмотки 5. На установленном в подшипниках 6 вале 7 выполнен размещенный внутри статора 3 ротор 8 с зубцами 9 и датчиком положения 10, который укреплен на вале 7. Кабельный ввод 11 - для подвода кабеля питания (на фиг. 1, 2 не показан) к блоку управления 12. Кабельный ввод 13 - для подвода сигнального кабеля (на фиг. 1, 2 не показан) к блоку управления 12 и датчику положения 10. На выноске фиг. 3 представлен элемент «зубцового слоя» электродвигателя, в котором на статоре 3 выполнены зубцы 4 и впадины 14 между ними, а на роторе 8 зубцы 9 и впадины 15 между ними. Зубцы 4, 9 и впадины 14 равны по ширине, а впадины 15 на роторе 8 превышают ширину зубцов 9 ротора 8 на 1/3 от его ширины (соотношение ширин зубца 9 и впадины 15 ротора 8-3:4).
Вариант конструкции со статором 16 внутри ротора 17 в поперечном разрезе представлен на фиг. 4.
В варианте конструкции с k=2 (см. фиг. 5) подключение фазных обмоток 5 осуществлено параллельно от одного коммутатора (в блоке управления 12), а в варианте, показанном на фиг. 6, при k=2 подключение фазных обмоток 5 осуществлено также параллельно от двух синхронизированных между собой коммутаторов 18. На фиг. 7 приведена схема подключения фазных обмоток 5 электродвигателя последовательно. Величина к определяет количество фазных обмоток, каждая из которых представляет собой трехфазную систему (см. фиг. 5-7).
Работает предлагаемый электродвигатель следующим образом (см. фиг. 1…8).
Подача силового электропитания к блоку управления 12 осуществляется через кабельный ввод 11. По сигналу управления (подаваемому по сигнальному кабелю через кабельный ввод 13) контур регулирования (размещенный в блоке управления 12) формирует сигнал задания по скорости вращения ротора 8 (установленного на вале 7, размещенном в подшипниках 6, укрепленных в корпусе 2, закрытом крышкой 1), который по взаимодействию с обратной связью (по сигналам датчика положения 10) по скорости вырабатывает сигнал задания по току в фазных обмотках 5. Контур регулирования тока в обмотках 5 формирует сигнал задания по формированию напряжения на фазных обмотках 5. Сигнал задания поступает на регулятор напряжения (размещенный в блоке управления 12), который формирует выходное силовое напряжение, поступающее на коммутатор 18. Коммутатор 18 формирует алгоритм коммутации фаз двигателя в соответствии с принципом управления (данный электродвигатель может работать в режиме шагового двигателя, бесколлекторного двигателя постоянного тока либо как асинхронный двигатель при управлении от частотно-токового преобразователя). Фазные катушки 5 статора 3, в соответствии с алгоритмом коммутации, создают вращающееся магнитное поле, которое приводит во вращение ротор 8 электродвигателя со скоростью, соответствующей скорости вращения магнитного поля. В зависимости от системы управления двигатель либо совершает заданное число оборотов по заданию (трехконтурное управление), либо поддерживает заданную частоту вращения (двухконтурное управление).
Благодаря выполнению зубцового слоя статора 3 и ротора 8 так, что ширины статорных 4 и роторных 9 зубцов равны, отношение ширин статорных зубцов 4 и впадин 14 между ними равно 1:1, а отношение ширин роторных зубцов 9 и впадин 15 между ними равно 3:4, и соответствующему соединению фазных катушек 5 между собой и подключению их к блоку управления 12 обеспечивается постоянство магнито-движущей силы, направленной в одну сторону в любых типах электродвигателей данной конструкции (при любых k) при оптимальном электрическом угле включения обмоток, обеспечиваемом блоком управления 12, однажды настроенным и не требующем перенастройки при изменении к.
Коммутатор 18 с раздельными ключами (см. фиг. 8) представляет собой часть блока управления 12. Коммутатор с раздельными ключами позволяет избавиться от вентильного блока в управлении фазными обмотками, что повышает надежность и эффективность работы электродвигателя.
При параллельном подключении фазных обмоток 5 повышается надежность электродвигателя, так как в этом случае выход из строя одной из фазных обмоток 5 не приводит к выходу из строя электродвигателя, а при подключении от нескольких синхронизированных коммутаторов происходит дополнительное резервирование двигателя за счет резервирования коммутаторов.
При последовательном подключении фазных обмоток 5 повышается момент, развиваемый электродвигателем, при том же токе потребления, но при этом снижается надежность электродвигателя, так как выход из строя одной из фазных обмоток 5, приводит к выходу из строя электродвигателя.
Конструктивное исполнение статор 16 внутри ротора 17 (см. фиг. 4) позволяет использовать предлагаемый электродвигатель для мотор-колеса.
Предлагаемый электродвигатель выполнен в металле (см. фиг. 1, 2) в габаритах 170×170×70 мм с k=3 и развивает пусковой момент (при параллельном подключении) примерно 20 Нм (при токе 20 А).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1995 |
|
RU2076433C1 |
| Индукторная машина | 1972 |
|
SU458929A1 |
| БЕСКОНТАКТНАЯ ИНДУКТОРНАЯ ВЕНТИЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2004 |
|
RU2277284C2 |
| РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2072611C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 2012 |
|
RU2497264C1 |
| Датчик углового положения с электромагнитной редукцией | 1981 |
|
SU954810A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ | 2013 |
|
RU2529306C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |



Изобретение относится к области электротехники, в частности к электрическим машинам индукторно-реактивного типа, используемым в качестве электроприводов. Технический результат - обеспечение простого, надежного и малогабаритного электродвигателя. Электродвигатель включает k фазных обмоток, при этом число зубцов на статоре Zc=6k и на роторе Zp=5k, где k=1, 2, 3, 4, 5, 6… . Ширины статорных и роторных зубцов равны, отношение ширин статорных зубцов и впадин между ними равно 1:1, а отношение ширин роторных зубцов и впадин между ними равно 3:4. При k=2 и более обмотки могут быть подключены к блоку управления параллельно, причем возможно их подключение от одного блока управления или от нескольких отдельных, синхронизированных между собой, блоков управления. Указанные обмотки могут быть подключены к блоку управления последовательно. Также возможно подключение обмоток к блоку управления посредством раздельных ключей верхнего и нижнего уровня. 3 з.п. ф-лы, 8 ил.
1. Электродвигатель, содержащий статор с охваченными фазными обмотками зубцами (полюсами), размещенный внутри статора или вокруг него безобмоточный ротор с зубцами и с датчиком положения ротора (или без него), корпус с крышками и блоки управления (один или несколько), отличающийся тем, что включает k фазных обмоток, при этом число зубцов на статоре Zc=6k и на роторе Zp=5k, где k=1, 2, 3, 4, 5, 6…, причем ширины статорных и роторных зубцов равны, отношение ширин статорных зубцов и впадин между ними равно 1:1, а отношение ширин роторных зубцов и впадин между ними равно 3:4.
2. Электродвигатель по п. 1, отличающийся тем, что при k=2 и более обмотки подключены к блоку управления параллельно, причем возможно их подключение от одного блока управления или от нескольких отдельных, синхронизированных между собой, блоков управления.
3. Электродвигатель по п. 1, отличающийся тем, что при k=2 и более обмотки подключены к блоку управления последовательно.
4. Электродвигатель по п. 1, отличающийся тем, что обмотки подключены к блоку управления посредством раздельных ключей верхнего и нижнего уровня.
| ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2352048C1 |
| ТРЕХФАЗНЫЙ РЕАКТИВНЫЙ ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МАЛЫМИ ПУЛЬСАЦИЯМИ МОМЕНТА | 1999 |
|
RU2153218C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2159494C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХПАКЕТНЫМ ИНДУКТОРОМ (ВАРИАНТЫ) | 2008 |
|
RU2356154C1 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2066912C1 |
| US 4035680 A1, 12.07.1977. | |||

