Изобретение относится к медицине, а именно к диагностическим приборам, предназначенным для определения величины тонуса скелетных мышц, и может использоваться в медицинских учреждениях и медпунктах, спортивными врачами, мануальными терапевтами и др.
Известны механические приборы для определения тонуса мышц, например, тонометр, описанный в статье Иваничева Г.А, и др., Переменно-дискретная тонометрия в оценке эффективности постизометрической релаксации локальных мышечных гипертонусов // Невропатология и психиатрия. - 1985. - т. 85.- вып. 4.- с. 519- 521, рис. 1). Этот прибор представляет собой механический датчик упругости мышц, содержащий два подпружиненных подвижных элемента, телескопически соединенных между собой и с корпусом прибора, и устройство индикации, которым служат либо шкалы и риски на деталях прибора, либо стрелочный индикатор перемещений.
Недостатками таких приборов являются очень ограниченные функциональные возможности и невысокая информативность, невозможность учета податливости наружных покровов тела, необходимость визуального считывания показаний непосредственно в ходе обследования пациента и отсутствие автоматической обработки и регистрации данных.
При телескопическом креплении подвижных элементов воздействие на них какой-либо поперечной силы приводит к трению в сочленениях, вызывающему значительные погрешности в показаниях прибора. Поэтому такие приборы пригодны лишь для "точечных" замеров, не требующих перемещения подвижных элементов по поверхности тела пациента. Они не позволяют получать непрерывную картину распределения тонуса мышц вдоль некоторой линии, например, вдоль позвоночника. Это сужает функциональные возможности прибора и снижает информативность получаемых данных.
Значительное влияние на показания прибора оказывает податливость наружных покровов тела - кожи и подкожной жировой клетчатки. Их толщина и тургор (упругость) различны у разных людей и на разных участках тела, а значит различна и степень их влияния. Известные приборы не учитывают влияние податливости наружных покровов, что делает их показания недостоверными и несопоставимыми.
Визуальное считывание показаний и необходимость их последующей "ручной" обработки и регистрации увеличивают вероятность ошибок и требуют значительных затрат времени на проведение диагностики.
Наиболее близким аналогом является прибор для определения тонуса мышц - тономиометр "Тонус-1" (см. статью Чукарин В. И. и др. Электромеханический тономиометр на основе прецизионного серийного резистора // Теория и практика физической культуры. - 1976. - N 7. - с. 70-73). Тономиометр включает электромеханический датчик упругости мышц, источник электропитания и устройство индикации в виде электроизмерительного прибора. Датчик содержит два подпружиненных подвижных элемента и электрический преобразователь перемещений, в качестве которого используется переменный резистор. Преобразователь закреплен на одном из подвижных элементов и механически связан с другим. Благодаря этому разность перемещений подвижных элементов трансформируется преобразователем в электрический сигнал, пропорциональный этой разности. Сигнал поступает на устройство индикации - электроизмерительный прибор. Показания прибора считываются визуально, затем обрабатываются и регистрируются вручную. Применение такого устройства индикации облегчает считывание показаний и несколько уменьшает вероятность ошибок.
Недостатками этого прибора являются невысокая информативность показаний, низкая достоверность и точность ввиду возможных ошибок при считывании показаний непосредственно в ходе обследования и отсутствия учета индивидуальных особенностей пациента, а также значительные затраты времени на проведение диагностики.
Технический результат состоит в повышении информативности и достоверности показаний прибора и сокращении затрат времени на проведение диагностики.
Это достигается за счет того, что прибор для определения тонуса мышц, содержащий электромеханический датчик упругости мышц с двумя подвижными элементами и электрическим преобразователем перемещений, а также устройство индикации, подключенные к источнику питания, дополнительно содержит блок предварительной обработки сигналов, выполненный в виде микропроцессора, блок автоматической обработки и регистрации данных, в качестве которого использована ЭВМ, и устройство сигнализации, при этом электромеханический датчик упругости мышц подключен ко входу блока предварительной обработки сигналов, один из выходов которого подключен к блоку автоматической обработки и регистрации данных, а другой выход подключен ко входу устройства сигнализации, выход блока автоматической обработки и регистрации данных подключен ко входу устройства индикации, а блок предварительной обработки сигналов подключен к источнику питания. Кроме того, в качестве устройства индикации использованы дисплей ЭВМ, принтер или графопостроитель. Прибор также дополнительно содержит датчик сжимаемости наружных покровов тела, подключенный ко второму входу блока предварительной обработки сигналов, и сменный блок долговременного хранения информации, выполненный в виде постоянного запоминающего устройства, вход которого подключен к выходу блока предварительной обработки сигналов, а выход - ко входу блока автоматической обработки и регистрации данных. При этом в датчик упругости мышц введен второй электрический преобразователь перемещении и каждый из подвижных элементов датчика связан по крайней мере с одним из преобразователей перемещений. Целесообразно, чтобы в датчике упругости мышц использовались бесконтактные электрические преобразователи перемещении. Кроме того, по крайней мере, один из подвижных элементов датчика упругости мышц имеет шарнирно-рычажное крепление и снабжен наконечником, имеющим возможность свободного вращения вокруг оси его крепления, и по крайней мере, один из подвижных элементов датчика упругости мышц снабжен наконечником, имеющим возможность свободного качания на оси его крепления. К тому же датчик упругости мышц содержит регулятор усилия нажатия, подключенный к третьему входу блока предварительной обработки сигналов. В качестве устройства сигнализации использованы генератор звука или оптический излучатель с переменной характеристикой сигнала.
Введение в состав прибора микропроцессора и ЭВМ, в сочетании с дополнительным электрическим преобразователем перемещении, позволяет полностью автоматизировать обработку и регистрацию данных и тем самым повысить достоверность результатов обследования и значительно сократить затраты времени на диагностику.
Применение постоянного запоминающего устройства дает возможность проводить обследования, в том числе массовые, даже при отсутствии ЭВМ, что расширяет возможности применения прибора.
Использование в качестве устройства индикации дисплея ЭВМ, а также принтера или графопостроителя, обеспечивает графическую форму представления результатов обследования. Шарнирно-рычажное крепление подвижных элементов датчика упругости мышц позволяет проводить непрерывное обследование вдоль некоторой линии на поверхности тела пациента. Сочетание этих двух факторов дает возможность получать непрерывную картину распределения тонуса мышц вдоль выбранной линии - миотонограмму. Это существенно повышает информативность показаний прибора и позволяет называть его миотонографом. Кроме того, обеспечиваемая ЭВМ возможность многократного воспроизведения результатов обследования и их сопоставления с данными предыдущих обследований повышают достоверность и качество диагностики.
Применение датчика сжимаемости наружных покровов тела, регулятора усилия нажатия, вращающегося наконечника одного из подвижных элементов и качающегося наконечника другого, а также бесконтактных преобразователей перемещений повышают точность и достоверность показаний прибора. Использование устройства сигнализации, обладающего возможностью изменения характеристик сигнала и связанного через микропроцессор с одним из подвижных элементов датчика упругости мышц во всем диапазоне перемещении этого подвижного элемента, обеспечивает возможность поддержания постоянства усилия нажатия датчиком упругости мышц на поверхность тела пациента и тем самым повышает точность и достоверность показаний прибора.
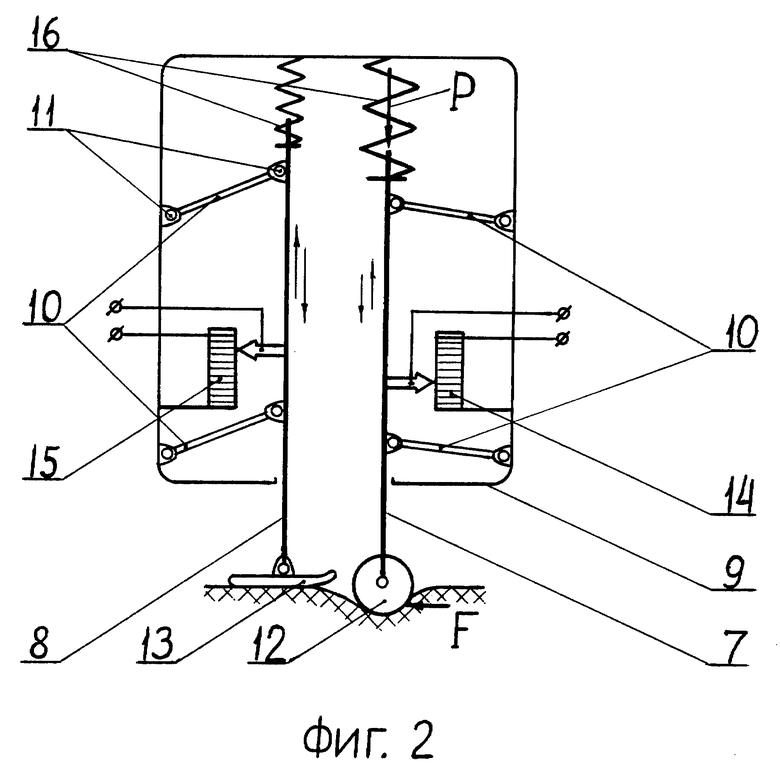
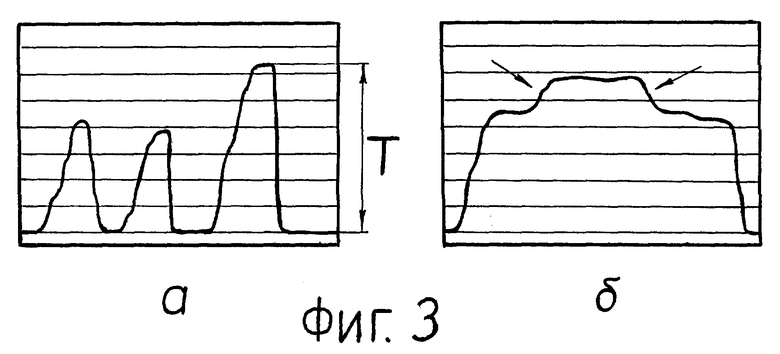
На фиг. 1 представлена блок-схема прибора, на фиг. 2 схематически изображен электромеханический датчик упругости мышц, на фиг. 3 показаны миотонограммы, соответствующие определению тонуса мышц в трех разных точках (а) и вдоль некоторой линии на поверхности тела (б). Чертежи имеют следующие цифровые обозначения: 1 - электромеханический датчик упругости мышц; 2 - блок предварительной обработки сигналов; 3 - блок автоматической обработки и регистрации данных (ЭВМ); 4 - устройство сигнализации о величине усилия нажатия; 5 - устройство индикации; 6 - источник питания; 7 - подвижный элемент датчика 1 - щуп; 8 - подвижный элемент датчика 1 - лапка; 9 - корпус датчика 1; 10 - рычаги крепления щупа 7 и лапки 8; 11 - шарниры; 12 -наконечник щупа 7; 13 - наконечник лапки 8; 14 - электрический преобразователь перемещений щупа 7; 15 - электрический преобразователь перемещений лапки 8; 16 - пружины щупа 7 и лапки 8.
Миотонограф содержит: электромеханический датчик упругости мышц 1; блок предварительной обработки сигналов, выполненный в виде микропроцессора 2; блок автоматической обработки и регистрации данных, представляющий собой ЭВМ 3; устройство сигнализации о величине усилия нажатия 4; устройство индикации, в качестве которого используется дисплей ЭВМ 5; источник питания 6.
Датчик упругости мышц 1 (фиг. 1) предназначен для определения величины прогиба обследуемой мышцы при нажатии на нее через наружные покровы тела, и величины усилия нажатия. Датчик 1 имеет (фиг. 2) два подпружиненных подвижных элемента - щуп 7 и лапку 8. Их крепление выполнено шарнирно-рычажным по схеме "параллелограмм". Щуп 7 крепится к корпусу 9 посредством пары рычагов 10, каждый из которых снабжен двумя шарнирами 11. Таким же образом крепится лапка 8. Оба подвижных элемента 7 и 8 имеют возможность перемещаться в осевом направлении (вверх-вниз) независимо друг от друга. Жесткость в боковом направлении обеспечивается конфигурацией рычагов 10 и расположением шарниров 11. Возможны и другие варианты варнирно-рычажного крепления, например "маятниковый", при котором каждый из подвижных элементов 7 и 8 крепится посредством одного рычага 10 и одного шарнира 11. Ввиду незначительности действующих на лапку 8 усилий ее крепление может быть и другим, в том числе телескопическим.
С целью уменьшения поперечной силы F, действующей на щуп 7 при его движении по телу пациента (фиг. 2), а также для устранения возникающих при этом неприятных ощущений, наконечник 12 щупа 7 закреплен на оси, перпендикулярной к продольной оси щупа 7, и выполнен способным вращаться вокруг своей оси, т.е. прокатываться по поверхности тела. Наконечник 13 лапки 8 также закреплен на оси, перпендикулярной к продольной оси лапки 8, и имеет возможность качаться, т.е. поворачиваться вокруг своей оси на некоторый угол при движении лапки 8 по изгибам тела и при ее отклонении от перпендикулярности к поверхности тела. Это несколько уменьшает ошибку измерений, но не является существенным, и поэтому наконечник лапки может выполняться неподвижным или способным вращаться вокруг своей оси.
Датчик 1 содержит два электрических преобразователей перемещений 14 и 15, один из которых постоянно связан со щупом 7, а другой - с лапкой 8. Возможен вариант датчика, в котором один из преобразователей связан с обоими подвижными элементами. Например, закреплен на щупе 7 и механически или другим способом связан с лапкой 8. В этом случае выдаваемый преобразователем электрический сигнал будет пропорционален разности перемещений подвижных элементов.
В данном варианте датчика упругости мышц использованы потенциометрические преобразователи, механически связанные с подвижными элементами 7 и 8. Возможно применение и других контактных преобразователей, таких как тензорезисторы и механометры. Однако предпочтительно использование бесконтактных преобразователей, например, индуктивных, емкостных, магнитоэлектрических, фотоэлектрических или оптических. Соответственно этому их связь с подвижными элементами будет электромагнитной, оптической или др. Преобразователи 14 и 15 крепятся к корпусу 9 датчика. Возможно их крепление к подвижным элементам 7 и 8.
Возможен также вариант датчика 1 с одним двухконтурным (двухпараметрическим) электрическим преобразователем вместо двух одноконтурных. При этом каждый из контуров такого преобразователя связан по меньшей мере с одним из подвижных элементов 7 или 8 датчика 1.
Для обеспечения возможности преднамеренного изменения величины усилия нажатия в соответствии с индивидуальными особенностями пациента или обследуемой мышцы датчик может содержать регулятор усилия нажатия. Причем для автоматического учета поправки на изменение усилия нажатия регулятор подключают к блоку предварительной обработки сигналов 2.
Блок предварительной обработки сигналов 2 предназначен для первичной математической обработки сигналов, поступающих от преобразователей 14 и 15, от регулятора усилия нажатия и от датчика сжимаемости наружных покровов, а также для управления работой устройства сигнализации 4. Действие датчика сжимаемости наружных покровов основано на определении изменения толщины наружных покровов при заданном изменении действующего на них усилия. Полученная величина автоматически вводится через микропроцессор 2 в ЭВМ 3 и формирует в алгоритме вычисления тонуса в качестве поправки δ Блок содержит в своем составе стандартный аналого-цифровой преобразователь типа КР 1113 ПВ1А, с помощью которого происходит преобразование аналоговых сигналов с датчиков в цифровой код. В варианте прибора с использованием постоянного запоминающего устройства блок 2 выполняет также функцию вывода предварительно обработанных сигналов на это устройство. Блок предварительной обработки сигналов 2 выполнен в виде специализированного микропроцессора, собранного на базе стандартного микропроцессора Е1821ВМ85А или др.
Блок автоматической обработки и регистрации данных 3 обеспечивает регистрацию данных пациента и результатов его обследования, выполнение необходимых вычислений, учет поправок на сжимаемость наружных покровов и на изменение усилия нажатия. В качестве блока автоматической обработки и регистрации данных 3 использована персональная ЭВМ. Могут использоваться и другие ЭВМ, способные выполнять указанные функции.
Возможен также портативный вариант прибора, предназначенный для проведения обследований в условиях временного отсутствия ЭВМ. Этот вариант прибора содержит сменный блок долговременного хранения информации, представляющий собой постоянное запоминающее устройство (ПЗУ) на базе микросхем памяти AM29F040 или др. ПЗУ подключают к микропроцессору 2 вместо ЭВМ. Оно обладает способностью запоминать предварительно обработанные микропроцессором данные обследований и, при подключении к ЭВМ, выдавать их для окончательной обработки и индикации.
Устройство сигнализации 4 обеспечивает возможность поддерживать усилие нажатия P (фиг. 2) постоянным в ходе обследования, что является одним из условий достоверности получаемых результатов. Устройство сигнализации 4 представляет собой генератор звука - зуммер, вмонтированный в микропроцессор 2 и управляемый им. Через микропроцессор 2 зуммер связан с электрическим преобразователем перемещений 14 щупа 7 во всем диапазоне перемещений щупа 7. Благодаря этому высота звукового тона сигнала определяется положением щупа 7, а значит, величиной усилия нажатия P. Вместо зуммера может быть использован динамик или же метроном с переменной частотой сигналов. Возможна также замена акустического устройства сигнализации другим устройством, способным изменять характеристики сигнала. Например, оптическим излучателем с переменной яркостью или цветом излучения.
Устройство индикации 5 предназначено для представления показаний прибора в виде графиков - миотонограмм (фиг. 3). В качестве устройства индикации 5 используется дисплей ЭВМ 3. Возможно также использование принтера или графопостроителя, которые подключают к ЭВМ 3.
Пользуются миотонографом следующим образом. В исходном положении щуп 7 и лапка 8 под действием своих пружин 16 максимально выдвинуты из корпуса 9 датчика 1 и опираются на ограничители. Торцы их наконечников 12 и 13 располагаются на одном уровне, сигналы преобразователей 14 и 15 отсутствуют. Для определения величины мышечного тонуса датчик 1 прижимают рукой к поверхности тела пациента с усилием нажатия P (фиг. 2). Щуп 7 и лапка 8 должны быть приблизительно перпендикулярны поверхности (фиг. 2). Под действием усилия они перемещаются относительно корпуса 9 датчика 1, частично утапливаясь в него. Величина перемещений неодинакова, т.к. щуп 7 снабжен более жесткой пружиной, чем лапка 8. Преобразователи 14 и 15 трансформируют перемещения щупа и лапки в пропорциональные им электрические сигналы, направляемые в микропроцессор 2.
Для получения непрерывной картины распределения тонуса мышц вдоль некоторой линии тела необходимо провести датчиком 1 по этой линии, сохраняя приблизительно постоянными усилие нажатия и положение датчика 1 относительно поверхности. При так называемой динамической тонометрии - определении изменений тонуса мышцы с течением времени - датчик удерживается в фиксированной точке в течение заданного времени.
Устройство сигнализации 4 работает непрерывно в продолжение сеанса обследования. Высота тона сигнала значительно изменяется даже при небольших отклонениях усилия нажатия от выбранной его величины. Это позволяет специалисту, проводящему обследование, выдерживать постоянство усилия с достаточной для практики точностью.
Из микропроцессора 2 предварительно обработанные сигналы преобразователей 14 и 15 поступают в ЭВМ 3. Перед началом обследования в ЭВМ 3 вручную или автоматически, с помощью подключаемого к микропроцессору 2 датчика сжимаемости наружных покровов тела, вводятся данные пациента, необходимые для расчета поправки на сжимаемость наружных покровов. С помощью экспериментально установленной зависимости ЭВМ 3 вычисляет по ним величину поправки и учитывает ее при расчете тонуса.
Вычисленные значения мышечного тонуса вводятся в память ЭВМ 8 и, по окончании сеанса обследования, представляются на дисплее в виде миотонограммы (фиг. 3). Фиг. 3а соответствует определению тонуса в трех точках тела, фиг. 3б - непрерывному определению тонуса вдоль некоторой линии на поверхности тела (или же в фиксированной точке, но в течение некоторого времени). При необходимости миотонограмма может быть повторно представлена на дисплее или воспроизведена на бумаге с помощью принтера или графопостроителя.
Проведение обследований возможно и при отсутствии ЭВМ. В этом случае к микропроцессору 2 вместо ЭВМ подключается сменное постоянное запоминающее устройство. После проведения обследований загруженное информацией ПЗУ отсоединяют от микропроцессора и, при необходимости, заменяют аналогичным свободным ПЗУ. Затем в удобное время его подключают к ЭВМ. При этом происходят считывание информации, ее окончательная обработка и ввод в память ЭВМ.
Благодаря шарнирно-рычажному креплению подвижных элементов 7 и 8 влияние трения, вызываемого действием поперечной силы F (фиг. 2), практически не сказывается на показаниях прибора. Именно этим обусловлена возможность непрерывного обследования вдоль линии на поверхности тела. Такая возможность существенно важна по следующей причине. Индивидуальные особенности пациентов и каждой мышцы, такие как неодинаковое развитие мышечной системы, разная величина нормального тонуса, периодические его изменения и другие факторы делают очень трудоемкой и недостаточно объективной диагностику на основе сопоставления локальных значений тонуса между собой и с условной "нормой". Миотонограмма же дает необходимую и, во многих случаях, достаточную информацию даже без определения числовых значений тонуса. На ней отчетливо прослеживается наличие градиентов тонуса, т.е. переходов от невозбужденных мышц к возбужденным и, наоборот (показаны стрелками на фиг. 3б). Поэтому простой анализ формы графика дает возможность четко выявить наличие аномалий - локальных гипер- или гипотонусов.
Автоматическая обработка и регистрация данных, возможность их многократного воспроизведения повышают достоверность получаемых результатов и значительно сокращают затраты времени на диагностику. Последнее особенно важно при динамической тонометрии, требующей определения нескольких десятков значений тонуса в каждом сеансе, а также при массовых обследованиях детей с целью выявления намечающихся дефектов позвоночника.
Изобретение относится к медицине, а именно к диагностическим приборам, предназначенным для определения величины тонуса скелетных мышц, и может использоваться в медицинских учреждениях и медпунктах, спортивными врачами, мануальными терапевтами и др. Технический результат состоит в повышении информативности и достоверности показаний прибора и сокращении затрат времени на проведение диагностики. Прибор содержит электромеханический датчик упругости мышц, блок предварительной обработки сигналов, блок автоматической обработки и регистрации данных, устройство индикации, устройство сигнализации с переменной характеристикой сигнала и блок питания. Прибор может также комплектоваться датчиком сжимаемости наружных покровов тела и сменным блоком долговременного хранения информации. Датчик упругости мышц имеет два подвижных элемента, два электрических преобразователя перемещений подвижных элементов и регулятор усилия нажатия. Конструкция датчика в сочетании с непрерывной автоматической обработкой и регистрацией данных позволяет не только определять местные значения мышечного тонуса, но и проводить непрерывное обследование вдоль некоторой линии на поверхности тела, например, вдоль позвоночника. Получаемые результаты представляются в виде графика-миотонограммы. 9 з.п.ф-лы, 3 ил.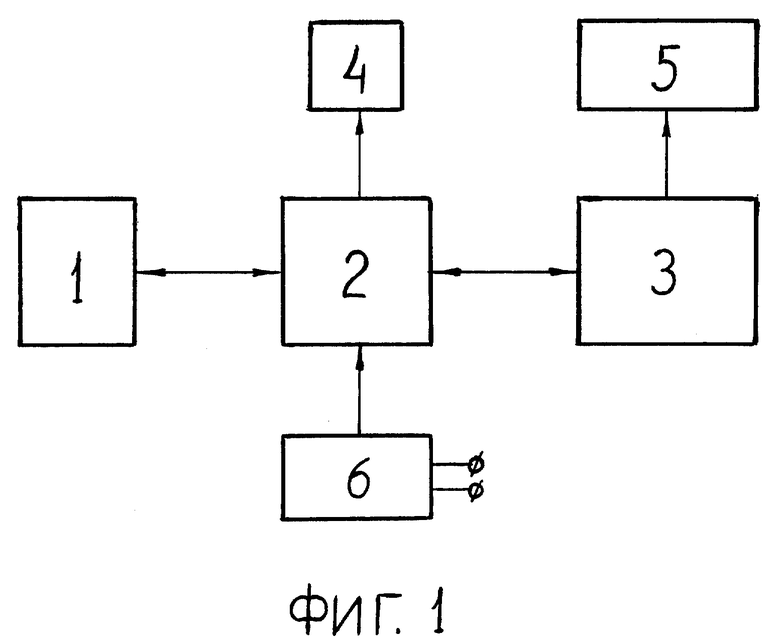
| Чукарин В.И | |||
| и др | |||
| Электромеханический тономиометр на основе прецизионного серийного резистора | |||
| В: Теория и практика физической культуры, 1976, № 7, с | |||
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
