Изобретение относится к сотовой аналоговой мобильной системе телефонной связи, в которой базовые станции имеют каналы управления и доступа, посредством которых подвижный пользователь может связываться с системой и сам посылать запрос на установление соединения.
Предшествующий уровень техники
Во многих известных мобильных системах телефонной связи, например таких, как системы AMPS и TACS, подвижная станция сама определяет ячейку, в которой она должна устанавливать связь, путем сканирования определенного числа частот, представляющих собой каналы управления для обеспечения доступа, и затем выбора той частоты, для которой принятый подвижной станцией сигнал имеет самый высокий уровень. Отведенные для использования частоты в таких мобильных системах телефонной связи зачастую непрерывно распределяются между ячейками, причем распределение осуществляется таким образом, чтобы обеспечивать повторное использование частот. Обычной процедурой в данном смысле является распределение частот в области, включающей в себя 21 ячейку, причем это распределение для 21 ячейки затем повторяется. Такая схема распределения позволяет разнести по пространству ячейки, работающие на одних и тех же частотах, чтобы в существенной мере исключить взаимное помеховое воздействие ячеек друг на друга.
В системах AMPS и TACS используется канал управления для установления соединений и каналы рабочей нагрузки (трафика), используемые на этапе ведения разговора при осуществлении телефонного вызова. Такие системы обычно используют 21 частоту в качестве каналов управления, основываясь на использовании известной схемы распределения частот по 21 частоте, при использовании одного канала управления на ячейку.
Функции каналов управления могут быть разделены на две области логических функций: поисковый вызов и доступ. В дополнение к передаче сообщений поискового вызова на подвижные станции для установления вызовов канал поискового вызова также включает в себя общие информационные функции, так называемые функции широковещательной передачи информации. Широковещательная информация также может иметь влияние на доступ. Во многих случаях функции поискового вызова и доступа реализуются с использованием одной и той же частоты, даже в аналоговых системах таких, как вышеупомянутые системы AMPS и TACS. Канал управления, который имеет эти функции, далее будет называться объединенным каналом управления поисковым вызовом и доступом.
В некоторых случаях использование 21 частоты для каналов управления может быть признано недостаточным, например в случаях сильных взаимных помех, когда 21 частоты недостаточно для предотвращения взаимных помех по каналам управления между отдельными соединениями по вызовам. В этих случаях можно увеличить число объединенных каналов управления поиском и доступом до 32, для обеспечения возможности использования других схем распределения частот. Либо можно по-прежнему использовать схему из 21 частоты и несколько частот в резерве на случай необходимости решения проблемы распределения частот в областях, для которых имеют место проблемы сильных помех.
Разумеется, как канал поискового вызова, так и канал доступа, имеют ограниченную пропускную способность. Требуемая пропускная способность таких каналов будет в значительной степени зависеть от действий абонентов, размеров ячейки и т.д., но также в значительной степени может определяться оператором, например, путем ограничения области поискового вызова, в пределах которой может передаваться сообщение поискового вызова, или тем, как часто должны регистрироваться подвижные станции.
Требование высокой пропускной способности канала управления обычно отражается в высоких требованиях к каналу рабочей нагрузки; эти требования к каналу рабочей нагрузки удовлетворяются за счет введения дополнительных ячеек. Если в каждой ячейке предусмотрен объединенный канал управления поисковым вызовом и доступом, то при этом обеспечивается более высокая пропускная способность канала доступа. Пропускная способность поискового вызова канала управления поисковым вызовом и доступом увеличивается в некоторой степени, так как частоты установления соединений в данной области будут разделяться по множеству каналов управления поисковым вызовом и доступом.
Кроме того, технические характеристики вышеупомянутых мобильных систем телефонной связи AMPS и TACS позволяют ввести микроячейки, которые охватываются так называемыми зонтичными ячейками, не влияя на повторное использование частот зонтичными ячейками. В этом случае для зонтичных ячеек предусмотрены каналы управления поисковым вызовом и доступом, а для микроячеек предусмотрены только каналы доступа, но отсутствуют каналы поиска, как описано в патенте США N 5 357 559. Подвижные станции должны быть настроены на канал поиска, объединенный канал управления поисковым вызовом и доступом, в зонтичной ячейке в состоянии отсутствия вызова, причем подвижные станции должны сканировать каналы доступа в процессе получения доступа к системе. В такой ситуации подвижная станция сможет выбрать зонтичную ячейку или микроячейку, если последняя обеспечит сигнал более высокого уровня, чем зонтичная ячейка. Преимущество такого способа заключается в том, что нет необходимости распределять сигналы поисковых вызовов для большого числа микроячеек, и быстро перемещающиеся подвижные станции имеют возможность перемещаться на большие расстояния, не теряя контакта со "своим" каналом поискового вызова. Такая потеря контакта потребовала бы повторного сканирования каналов поискового вызова. Таким образом, автомобильная подвижная станция, например, рискует необходимостью постоянного выполнения процедуры сканирования и захвата каналов поискового вызова, если бы для микроячеек были предусмотрены каналы поискового вызова. Подвижная станция не имеет возможности прослушивать сообщения поискового вызова или другие сообщения в процессе проведения такого сканирования и синхронизации. Каналы доступа и объединенные каналы управления поисковыми вызовами и доступом могут испытывать замирания, что приведет в подвижной станции к предоставлению доступа к менее пригодной ячейке. Получаемый при этом низкий уровень сигнала увеличивает риск возникновения ошибок сигнализации при установлении соединения.
Еще одно возможное применение отдельных каналов поискового вызова и доступа проиллюстрировано в патенте США N 4 799 253. В данном патенте описана ситуация, когда желательно обеспечить совместное существование двух мобильных систем телефонной связи в области, где трафик должен обрабатываться обеими системами. Одной системе предоставлена возможность обрабатывать сигналы каналов поискового вызова и доступа, т.е. сигналы управления, с которыми должны синхронизироваться все подвижные станции. В случае доступа по вызову в ответ на запрос установления соединения по вызову от подвижной станции, имеется возможность часть вызова обрабатывать другой системой путем посылки этим подвижным станциям так называемого сообщения управляемого повторного выполнения от первой системы. В системах AMPS и TACS "управляемое повторное выполнение" означает, что доступ подвижной станции режектируется и предлагается повторить попытку доступа на любой из шести заданных частот доступа к каналу. Этот способ может обеспечить некоторое улучшение вероятности того, что подвижная станция выберет более приемлемый канал, однако данный метод совершенно непригоден для использования при установлении соединений по вызовам для подвижной станции или для целей регистрации пользователя.
Использование процедуры передачи сигнала управления повторным выполнением приводит к двум отдельным случаям, в зависимости от того, каким образом эта процедура используется.
В первом случае лишь одна частота указывается в команде управления повторным выполнением; эта частота является частотой канала доступа, выделенного другой системе. Если подвижная станция выбрала "неправильную" ячейку в своей первой попытке доступа в первой системе, то она получит указание об установке соединения в аналогично неправильной ячейке, но теперь в другой системе.
Во втором случае команда управления повторным выполнением включает в себя большое число частот вместо указания одной частоты. В этом случае имеется риск того, что даже если первая частота и соответственно ячейка были правильными, то подвижная станция при своем поиске канала доступа может выбрать непригодную ячейку для попытки доступа в соответствии с командой повторного выполнения, ввиду тех же самых проблем, что и описанные выше в связи с замиранием. Управление повторным выполнением также увеличивает время, требуемое на установление соединения по вызову, в типовом случае на 2-3 секунды.
Раскрытие изобретения
В сотовых мобильных системах телефонной связи подвижная станция измеряет уровень принимаемого сигнала, переданного по каналам управления, для определения ячейки, в которой должно быть установлено соединение по вызову. В тех мобильных системах телефонной связи, в которых оценка уровня сигнала в подвижной станции осуществляется просто быстрым измерением уровня в канале сигнализации, существует опасность того, что подвижная станция сделает неверный выбор и выберет частоту и ячейку, которые не являются наилучшими имеющимися частотой и ячейкой соответственно, в отличие от случая измерения уровня в канале сигнализации на протяжении более длительного времени. Это главным образом обусловлено замиранием сигналов, принятых по каналам управления.
Если подвижная станция запрашивает доступ к системе для установления соединения по вызову, то это соединение должно быть установлено в ячейке, в которой подвижная станция запрашивала доступ, т.е. в ячейке, которой принадлежит канал управления. Если выбор ячейки не является оптимальным вариантом выбора, т. е. подвижная станция выбрала частоту, которой в действительности не соответствует самый высокий уровень сигнала в данной области, то возможно, что качество речевого сигнала будет плохим как при локальных соединениях, так и по отношению к другим вызовам, как результат повышенных помех в совпадающем канале.
Вышеуказанная проблема, при которой подвижные станции иногда выбирают контрольный канал неправильной частоты в связи с замиранием, преодолевается путем определения нескольких каналов доступа для каждой ячейки каналов трафика. Подвижная станция оценивает все эти каналы при своем выборе канала доступа. Подвижная станция будет выбирать канал доступа, который оценен как сигнал с наиболее мощным сигналом. Следовательно, все каналы доступа в одной и той же ячейке каналов трафика передают с примерно одинаковой выходной мощностью, так что выбор канала доступа подвижными станциями будет случайным в той степени, в какой это только возможно. Малое различие в выходной мощности будет иметь лишь незначительный эффект при функционировании.
Новизна и уникальность устройства, соответствующего изобретению, заключаются в том, что в ячейке, характеризуемой областью, перекрываемой каналами трафика, предусматриваются два или более каналов доступа.
В данном контексте несущественно, лишена ли ячейка каналов поискового вызова, имеет ли она один или более каналов поискового вызова или не объединены ли каналы доступа с каналами поискового вызова для формирования вышеупомянутых объединенных каналов управления поисковыми вызовами и доступом.
Задачей изобретения является повысить вероятность того, что подвижные станции при установлении соединения по вызову осуществят выбор такого соединения в наиболее оптимальной ячейке. Это достигается с помощью не только использования разнесения по времени при измерении уровня сигнала, т.е. измерения уровня сигнала для различных моментов его приема, но и использования разнесения по частотам, т.е. за счет использования различных частот каналов доступа.
Еще одной задачей изобретения является создание стационарной станции, имеющей возможность передвижения, или медленно перемещающейся подвижной станции, которая имеет высокую вероятность выбора корректной ячейки.
Одним из преимуществ изобретения является увеличение пропускной способности каналов.
Другое преимущество изобретения состоит в повышении вероятности того, что соединение будет установлено, причем оно будет установлено в наилучшей ячейке.
К другим преимуществам изобретения следует отнести улучшение качества речевого сигнала в среднем, а также снижение нагрузок системы, которые вызывают необходимость переключения канала связи с переходом в корректную ячейку в состоянии установления соединения по вызову.
Дополнительные преимущества изобретения связаны с тем, что изобретение может быть осуществлено в рамках действующих стандартов.
Краткое описание чертежей
Изобретение будет описано более детально со ссылками на иллюстрирующие его чертежи, на которых представлено следующее:
Фиг. 1 - частотная диаграмма, иллюстрирующая выбор каналов поискового вызова и доступа;
Фиг.2a - частотная диаграмма, иллюстрирующая различные распределения частот каналов поискового вызова и доступа;
Фиг. 2b - последовательности в объединенном канале управления поисковым вызовом и доступом;
Фиг. 3 - схематичное представление ячеек в мобильной системе телефонной связи и уровня сигнала в этих ячейках;
Фиг.4 - диаграмма уровня сигнала в ячейках с замиранием;
Фиг.5 - схематичное представление ячеек, содержащих базовые станции;
Фиг. 6 - то же, что и на фиг.5, с дополнительными ячейками и базовыми станциями;
Фиг. 7 - схематичное представление мобильной системы телефонной связи, имеющей зонтичные ячейки, которые имеют полные каналы управления и микроячейки, которые имеют только каналы доступа;
Фиг. 8a - схематичное представление мобильной системы телефонной связи, имеющей ячейки, каждая из которых содержит объединенный канал управления поисковым вызовом и доступом и только канал доступа;
Фиг. 8b - частотная диаграмма, относящаяся к каналам, представленным на фиг.8a;
Фиг. 9 - схематичное представление зонтичной ячейки, имеющей как объединенный канал управления поисковым вызовом и доступом, так и только канал доступа, а также микроячеек, каждая из которых имеет по меньшей мере два канала доступа.
Предпочтительный вариант осуществления изобретения
Ситуация, в которой подвижная станция MS контролирует каналы управления в мобильной системе телефонной связи, будет описана ниже со ссылками на фиг. 1, 2a, 2b и 3. Также будут описаны каналы управления.
На фиг. 1 показаны специализированные каналы управления DeCC каналы поискового вызова (пейджинговые каналы) PC, посредством которых в мобильной системе телефонной связи осуществляется поиск подвижной станции MS, и каналы доступа АС, посредством которых подвижная станция может получить доступ к системе. На фиг.1 частота имеет обозначение f, число каналов поискового вызова PC обозначено как N и число каналов доступа АС имеет обозначение М. Число каналов управления DeCC равно 21.
В типовой пользовательской ситуации подвижная станция MS будет проходить через три отдельные фазы в канале управления. Эти фазы показаны на фиг.1. При подаче напряжения подвижная станция будет первоначально осуществлять поиск из числа специализированных каналов управления DeCC. Все подвижные станции имеют информацию о числе предварительно определенных частот, положении этих частот в частотном спектре и числе предоставленных в распоряжение частот. В случае технических требований к интерфейсу, определяемых для данного примера, частоты находятся в диапазоне 800-900 МГц и их число равно 21. После того как эти каналы просканированы, подвижная станция должна выбрать канал DeCC, который имеет наибольший уровень сигнала, и засинхронизироваться с этим каналом.
Подвижная станция MS выделяет из специализированного канала управления DeCC информацию, относящуюся к числу каналов поискового вызова PC, которые использует система, количество которых в данном примере равно N, и расположение частот этих каналов в частотном спектре. Как показано стрелкой Р1, подвижная станция сканирует эти каналы поискового вызова и выбирает канал поискового вызова с самым сильным сигналом.
Подвижная станция затем сохраняет синхронизацию с выделенным каналом поискового вызова и принимает сообщения, направленные этой подвижной станции (пейджинговые сообщения или иные сообщения) или реагирует на информацию, переданную по широковещательному каналу. Эта информация может, например, инициировать процедуру регистрации или повторное сканирование и поиск канала поискового вызова с самым сильным сигналом. Кроме того, из информации, переданной по широковещательному каналу, выделяется информация о числе каналов доступа, используемых в системе (в данном примере оно равно М), и о расположении этих каналов в частотном спектре.
Канал доступа АС используется, когда подвижной станции необходимо контактировать с системой. Эта потребность может быть связана с непосредственным откликом на переданную широковещательную информацию, например относящуюся к регистрации, или с откликом на поисковый вызов, или с запросом вызова с подвижной станции MS, на который затем осуществляется последующее действие.
Когда подвижной станции необходимо инициировать процедуру доступа, станция должна сканировать каналы доступа АС в соответствии с обозначением стрелкой Р2, и выбирать канал с самым сильным сигналом. После совершения этой операции, часто после завершения вызова по каналу трафика подвижная станция возвращается в каналы поискового вызова PC, как показано стрелкой Р3, и сканирует эти каналы для выбора канала с самым сильным сигналом.
На фиг. 2a показано, каким образом подвижные станции могут определять число и положение каналов поискового вызова и каналов доступа в частотном пространстве. Начальная точка для каналов поискового вызова PC обычно фиксирована и идентична начальной точке для специализированных каналов управления DeCC, хотя могут использоваться также и другие начальные точки. Как и в первом случае на фиг. 2a, частота имеет обозначение f.
Подвижные станции выделяют из широковещательной информации параметр N, который обозначает число каналов поискового вызова, параметр СМАХ, который обозначает число М каналов доступа АС, и параметр СРА, который указывает на то, являются ли каналы поискового вызова и каналы доступа объединенными каналами управления поисковым вызовом и доступом, т.е. имеют одну и ту же начальную точку. Если СРА = 0, то это означает, что каналы доступа начинаются с частоты, на которой заканчиваются каналы поискового вызова. Кроме того, можно передать сообщение "Установка Нового Канала Доступа", посредством которого можно показать полосу канала доступа на любом выбранном участке частотной области, разумеется, в пределах полосы частот, отведенной для функционирования мобильных систем телефонной связи.
Как указано выше, системы AMPS и TACS обычно используют 21 канал управления, которые образуют объединенные каналы управления поисковым вызовом и доступом. Однако системы AMPS и TACS допускают функционирование канала управления с разделением его на канал поискового вызова и канал доступа. Соответственно стандартам систем AMPS и TACS, максимальное число каналов, которое может быть использовано (в зависимости от спецификаций), составляет 32 канала поискового вызова и 128 каналов доступа.
Частоты 21 канала управления используются практически во всех существующих системах; эти частоты используются для специализированного канала DeCC, канала поискового вызова PC и канала доступа АС. Это также применимо для вышеупомянутых мобильных систем телефонной связи AMPS и TACS, и упомянутый канал, представляющий собой объединенный канал управления поисковым вызовом и доступом, более детально показан на фиг.2b. Время на этом чертеже имеет обозначение Т. Канал включает в себя две частоты, одна частота f1 для прямой линии связи и другая частота f2 для обратной линии связи при разнесении радиоканалов на интервал 45 МГц. Несмотря на то, что упомянутые мобильные системы телефонной связи представляют собой аналоговые системы, канал управления является цифровым, так как потоки битов передаются на обеих частотах f1 и f2. По прямой линии связи от базовой станции системы передается битовая последовательность ОН, которая включает в себя информацию, являющуюся так называемыми непроизводительными расходами, например идентификацию системы, число N каналов поискового вызова. Затем следует битовая последовательность РА, которая может включать в себя, в числе прочего, информацию поискового вызова и команды для подвижных станций, а также может включать битовую последовательность АС1, содержащую информацию доступа. Битовая последовательность ОН появляется повторно спустя временной интервал Т1, который имеет длительность около 1 секунды. По обратной связи от подвижной станции передается частота f2 и битовая последовательность АС2, содержащая информацию доступа. Две битовые последовательности АС1 и АС2 вместе образуют канал доступа АС в объединенном канале управления поисковым вызовом и доступом.
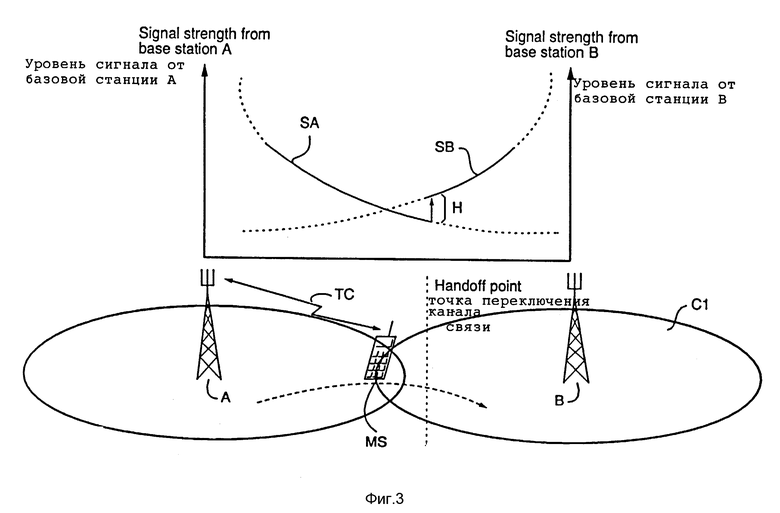
На фиг. 3 представлены две базовые станции A и B, каждая в соответствующей ячейке C1, а также подвижная станция MS. На чертеже представлена также диаграмма уровня сигнала, на которой кривая SA указывает уровень сигнала от базовой станции A, а кривая SB указывает уровень сигнала от базовой станции В. В процессе вызова, который осуществляется по каналу трафика ТС, подвижная станция MS обычно может отклоняться от установленного предельного значения эквисигнального уровня между двумя ячейками на 3-5 дБ. Допустимое отклонение образует гистерезис H переключения каналов связи, который используется практически во всех мобильных системах телефонной связи. Отклонения в уровне сигнала, превышающие эту величину, будут оказывать отрицательное влияние на качество передаваемого речевого сигнала.
В случае доступа примерно 10% подвижных станций выберут частоту более слабого сигнала в момент, когда уровень сигнала различается на 9 дБ и более. Это обусловлено замираниями, если замирание может рассматриваться как некоррелированное для измеряемых частот, как будет описано ниже со ссылками на фиг.4. Могут иметь место и другие ошибки для случая частотно-зависимых измерений уровня сигнала в подвижной станции. В описании к системе TACS для уменьшения возможности таких ошибочных измерений содержатся следующие рекомендации: "Для снижения влияния эффектов замирания на измерение уровня сигнала рекомендуется, чтобы сигнал на каждой частоте измерялся для двух моментов, разделенных интервалом 20 мс, и чтобы из двух полученных результатов измерений в качестве индикации уровня сигнала выбиралось максимальное значение".
На фиг. 4 представлена диаграмма замирания на длине волны λ = 0,3 м для несущей частоты 900 МГц, указанной на оси абсцисс, и относительного уровня сигнала SS в дБ, измеряемого вдоль оси ординат. На фиг.4 показаны два некоррелированные сигнала с замираниями S1 и S2 при средней разности в уровне сигналов 10 дБ. Сигнал S1 представляет собой сигнал канала доступа от базовой станции В на фиг.3, а сигнал S2 - сигнал канала доступа от базовой станции A. Из диаграммы видно, что несмотря на различие в уровне сигналов сигнал более слабый в среднем будет максимальным в точках 0,6; 1,1; 2,1; 3,2; 6,3 и 8,2 8,2λ в показанном примере. Каждое проявление замирания имеет длительность 0,2 или, 0,3λ например, это имеет место для замирания при 6,3λ Величину 0,1λ есть расстояние, проходимое при скорости 6 км/час за 20 мс при частоте несущей 900 МГц. Даже если следовать рекомендациям для системы TACS и осуществлять два измерения для канала доступа АС в положениях L1 и L2 соответственно временному интервалу ΔT = 20 мc, то имеется риск того, что более слабый канал S2 будет выбран в качестве канала доступа, если подвижная станция MS стационарна или перемещается с низкой скоростью.
Чрезмерно низкий уровень сигнала при доступе увеличивает риск возникновения ошибки сигнализации при установлении соединения, т.е. воспринимаемое качество системы будет весьма низким, в дополнение к вышеупомянутым проблемам, касающимся низкого качества соединения при передаче речевого сигнала.
Так как уровень сигналов S1 и S2 измеряется в подвижной станции MS и тем самым осуществляется выбор ячейки, следовало бы осуществить изменение стандарта в отношении границы перехода для улучшения вышеописанной ситуации. Однако такое изменение не позволило бы изменить ситуацию с учетом миллионов подвижных станций, которые уже выпущены и распространены по всему миру, т.е. такое изменение не может улучшить ситуацию для подавляющего большинства подвижных станций. Поэтому необходимо найти решение, которое находится в рамках существующих стандартов.
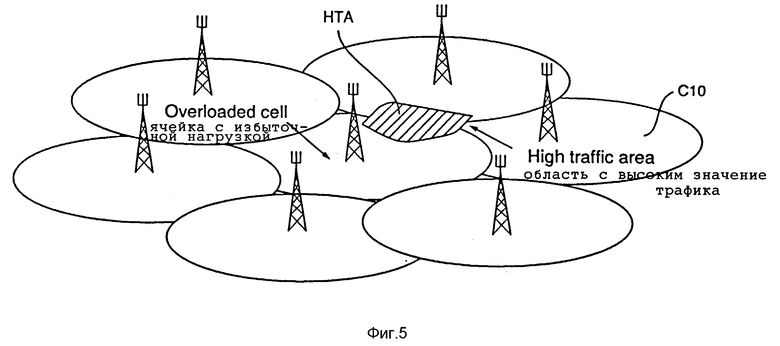
Фиг. 5 и 6 иллюстрируют известный способ увеличения пропускной способности мобильной системы телефонной связи. Сотовая мобильная система телефонной связи, согласно фиг.5, содержит ячейки C10, каждая из которых имеет соответствующую базовую станцию, обрабатывающую соответствующий объединенный канал управления поисковым вызовом и доступом. Трафик мобильной телефонной связи чрезвычайно высок в области, обозначенной НТА, иными словами, в этой области имеет место высокая потребность в речевых каналах. Естественно канал доступа и канал поискового вызова имеют ограниченную пропускную способность. Требуемая пропускная способность будет зависеть в большой степени от действий абонентов, размера ячейки и т.п., хотя в значительной степени она может определяться и оператором, например, путем ограничения области, в которой передается сообщение поискового вызова, или путем ограничения числа раз саморегистрации подвижных станций. Требование высокой пропускной способности, например, как в области НТА, обычно отражается в высоких требованиях к каналу трафика, и для решения этой проблемы, как показано на фиг. 6, добавляются дополнительные ячейки C11 со своими базовыми станциями. Если каждая ячейка C11 оснащена объединенным каналом управления поисковым вызовом и доступом, то пропускная способность канала доступа сразу же повысится. Пропускная способность поисковых вызовов объединенного канала управления также несколько возрастет, поскольку последовательности установления соединения по вызову в данной области теперь распространяются по большему числу каналов управления поисковым вызовом и доступом.
Термин "ячейка" является одним из широко распространенных в технике мобильных систем телефонной связи. Смысл этого термина сразу довольно легко понять интуитивно. Но что действительно характеризует собой ячейка? Согласно одному из определений, ячейка представляет собой "область, обслуживаемую каналом управления и некоторым числом каналов трафика, причем каналы трафика могут взаимно заменяться, поскольку все каналы трафика имеют одни и те же свойства. Это определение становится в некоторой степени спорным, когда географический район делится на зонтичные ячейки им микроячейки. На фиг.7 показаны зонтичные ячейки C2, содержащие базовые станции ВС, которые используют объединенные каналы управления поисковым вызовом и доступом. В некоторых частях зонтичных ячеек C2 микроячейки C3, имеющие каналы доступа, будут функционировать относительно одинаково в области C2 зонтичной ячейки. Другие проблемы с вышеприведенным определением возникают в связи с рассмотрением "пейджинговых ячеек", в случае которых ячейка содержит только один канал поискового вызова, в то время как функция доступа переходит на уровень микроячеек, для которых предусмотрены каналы доступа.
Радиосигнальная обстановка также вводит свои соображения, затрагивающие определение термина "ячейка". Каналы работают на различных частотах, которые могут подвергаться действию помех и возмущений в различной степени. Также возможно, что каналы будут иметь разные свойства, например, вследствие того, что каналы трафика принадлежат к различным поколениям аппаратных средств.
Следовательно, ячейка каналов трафика определяется в настоящем описании как географическая область, с которой связаны ряд каналов трафика, и которая характеризуется тем, что все каналы трафика могут быть взаимозаменяемы в той мере, в какой все эти каналы могут обеспечивать одно и то же базовое обслуживание во всей области ячейки. Каналы управления могут быть затем связаны с каналами трафика, причем либо объединенные каналы управления поисковым вызовом и доступом или каналы только поискового вызова или каналы только доступа.
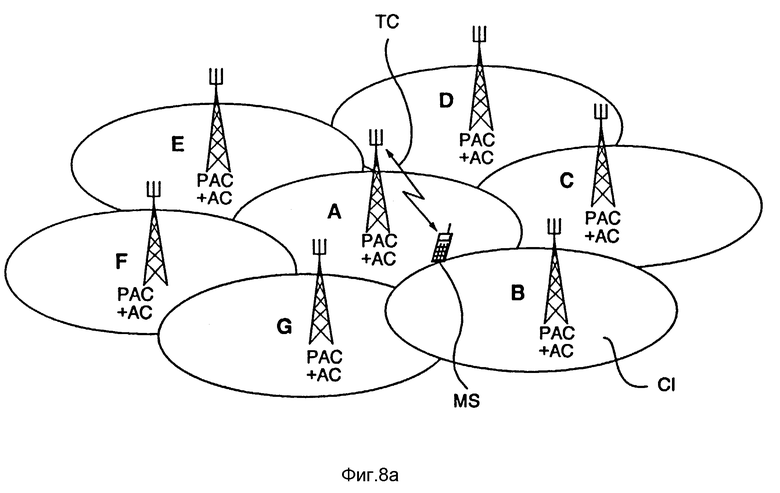
Фиг. 8a иллюстрирует часть мобильной системы телефонной связи, представленной на фиг. 3, и включает в себя ячейки C1, базовые станции A и В, а также дополнительные базовые станции C-G. Каждая ячейка имеет объединенный канал управления поисковым вызовом и доступом РАС и один из каналов доступа АС. Каналы трафика ТС использованы для соединений между подвижной станцией MS и подсистемой коммутатора телефонной сети общего доступа мобильной системы через базовые станции. Каналы, предназначенные для целей доступа, объединенные каналы РАС и каналы доступа АС имеют по существу ту же зону обслуживания радиосвязью, что и каналы трафика ТС. Разумеется, принципы, лежащие в основе изобретения, будут действовать и в том случае, если каждая из ячеек оснащена соответствующим чисто пейджинговым кланом (каналом поискового вызова) и двумя из каналов доступа АС, т.е. СРА =0 в соответствии с вышеизложенным, или при использовании сообщений "Установить новый канал доступа".
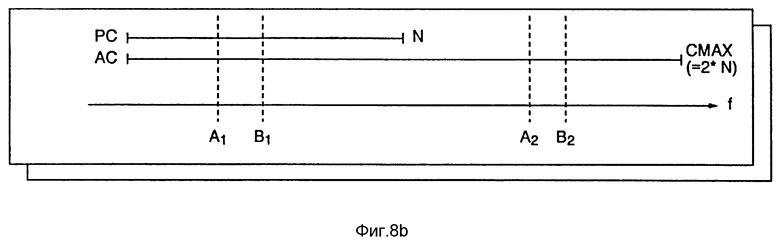
На фиг.8b показан возможный частотный график, в котором объединенный канал управления РАС в ячейке A работает на частоте A1, а канал доступа АС работает на частоте A2. Соответственно ячейка В использует частоты В1 и B2, и т. д. Таким образом, частота для каждой ячейки выбирается из полосы частот объединенного канала управления РАС, а частота для каналов доступа АС выбирается из той части полосы, которая не содержит пейджинговых каналов. Ввиду риска возникновения помех эти частоты не должны относиться к соседним каналам в одной и той же ячейке. Для того чтобы максимально использовать выигрыш от разнесения, частоты каналов доступа должны быть разнесены в максимально возможной степени. В случае общеизвестной 21 - ячеечной схемы, целесообразно использовать разнесение между каналами доступа, обеспечиваемое 21 каналами. Уровень в объединенном канале управления РАС и в канале доступа АС измеряется двукратно подвижной станцией MS в процедуре доступа для того, чтобы использовать разнесение во времени, как рекомендовано в технических условиях для мобильных систем телефонной связи AMPS и TACS.
На фиг. 9 схематично представлен фрагмент мобильной системы телефонной связи, включающий в себя зонтичную ячейку C4 и микроячейки C5. Этот пример иллюстрирует применение двух каналов доступа в каждой ячейке каналов трафика в среде микроячейки. Зонтичная ячейка C4 включает в себя объединенный канал управления РАС и канал доступа АС, а каждая микроячейка C5 имеет два канала доступа АС. Следует отметить, что каналы доступа в зонтичной ячейке C4 имеют уровень в микроячейке C5, который существенно отличается от уровня сигнала собственных каналов доступа микроячеек.
В качестве альтернативы оснащению каждой ячейки каналов трафика несколькими каналами доступа, можно определить новую ячейку доступа, имеющую область перекрытия и обслуживания, которая конгруэнтна (может быть совмещена) с ячейкой каналов трафика, снабженную одним или несколькими каналами доступа, и связать эту ячейку доступа с ячейкой каналов трафика так, чтобы каналы трафика выбирались из ячейки каналов трафика для запроса доступа, поступающего в эту ячейку доступа. Независимо от того, какой из вариантов выбран, всегда будет получена ситуация, при которой различные каналы доступа имеют зону обслуживания, которая конгруэнтна ячейке каналов трафика, и где выбор канала трафика не должен обязательно зависеть от того, какой канал доступа выбран подвижной станцией.
Другой возможный вариант состоит в том, что имеется ячейка с полной нагрузкой, имеющая каналы поискового вызова, доступа и трафика, и связанная ячейка, которая оснащена только одним (или несколькими) каналом (каналами) доступа или одним (или несколькими) каналом (каналами) доступа и несколькими каналами трафика, причем каналы трафика и маршрутизация графика могут свободно распределяться между ячейкой с полной нагрузкой и менее нагруженной ячейкой, так что на система не будет испытывать отрицательного влияния из-за исключения выигрыша вследствие группообразования.






Аналоговая мобильная система телефонной связи имеет ячейки каналов трафика, каждая из которых имеет базовую станцию. Эти базовые станции обрабатывают объединенные каналы управления для поискового вызова подвижной станции и каналы доступа для установления соединения с подвижной станцией или от нее. Подвижная станция имеет информацию относительно частот всех каналов доступа, и соединения устанавливаются по дуплексным каналам трафика. Географическая область, перекрываемая соответствующими ячейками каналов трафика, определяется посредством обеспечения использованиях всех каналов трафика в пределах этой области для предварительно определенных общих целей. Каждая из ячеек каналов трафика имеет по меньшей мере два канала доступа, разнесенные по частоте на требуемую величину и имеющие ту же самую зону действия, что и каналы трафика. При необходимости доступа подвижная станция сканирует уровень или мощность сигнала всех каналов доступа для двух моментов времени, разделенных интервалом 20 мс. Дуплексные каналы доступа обеспечивают возможность для подвижной станции найти канал доступа с самым сильным сигналом, несмотря на сильные замирания. Подвижная станция при этом устанавливает соединение по каналу трафика в наиболее подходящей ячейке, имеющей наиболее высокий уровень сигнала. В результате исключается необходимость в частых переключениях каналов связи и улучшается качество передаваемого речевого сигнала. Технический результат заключается в уменьшении времени установления соединения по вызову. 2 с. и 2 з.п.ф-лы, 9 ил.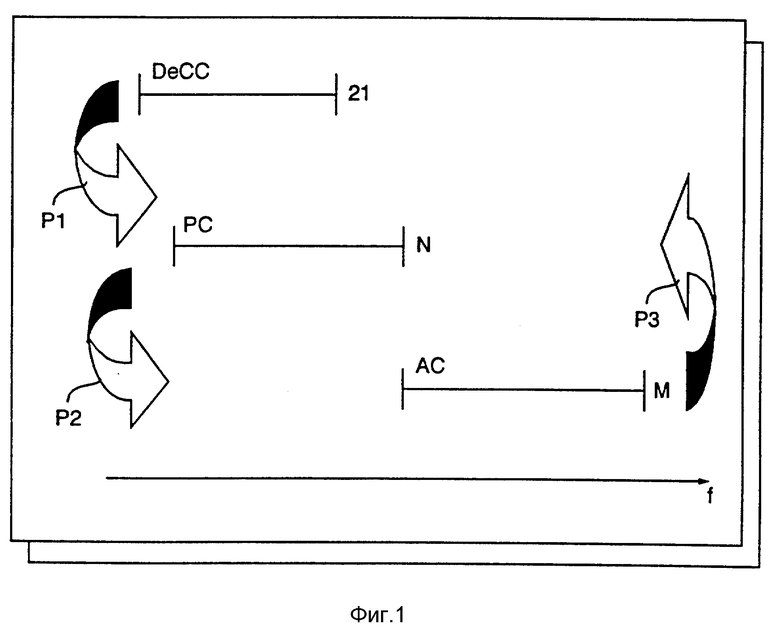
| US 4799258 A, 16.02.88 | |||
| Сварочный электрод | 1973 |
|
SU486885A1 |
| Стенд для монтажа и демонтажа подшипников жидкостного трения на прокатные валки | 1971 |
|
SU475248A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ МЯСНОГО ПРОДУКТА | 2004 |
|
RU2281011C2 |
| Система радиосвязи с доступом по запросу | 1986 |
|
SU1411985A1 |

