Изобретение относится к области гидроакустических измерений инфразвуковой частоты и может быть использовано для абсолютной градуировки гидрофонов.
Известен способ градуировки гидрофонов на инфразвуковой частоте путем их вертикальных, синусоидальных колебаний под свободной поверхностью покоящейся жидкости. Периодические изменения глубины погружения гидрофона приводят к действию на него переменного гидростатического давления (Голенков А.Н. "Абсолютная градуировка приемников инфразвукового давления", ж. Измер. техн. N 5, 1965, с. 42).
Этот способ градуировки обладает недостаточной точностью из-за наличия относительного смещения среды и гидрофона при низкой точности измерений глубины погружения.
Наиболее близким техническим решением к предлагаемому изобретению относится известный способ градуировки гидрофонов, основанный на том, что в неподвижной измерительной камере с водой закрепляют градуируемые гидрофоны и соединяют с измерительной камерой вспомогательный сосуд при помощи гибкой трубки, который совершает периодические синусоидальные колебания. Выравнивание гидростатической и инерционной составляющих в этом способе градуировки осуществляется путем изменения уровня воды с последующим его измерением (См. Голенков А. Н. "Абсолютная градуировка приемников инфразвукового давления", ж. Измер. техн., N 5, 1965, с. 43).
Этот способ обладает недостаточной точностью из-за дополнительной погрешности измерения уровней воды.
Целью настоящего изобретения является повышение точности градуировки гидрофонов на инфразвуковых частотах.
Способ заключается в измерении амплитуды вертикального перемещения ho вспомогательного сосуда с водой относительно измерительной камеры с гидрофоном, затем определяют частоту fo перемещения вспомогательного сосуда, при которой выходной сигнал гидрофона U равен нулю, и градуировочный коэффициент M гидрофона на частоте f определяют из соотношения (1)
(1)
где q - ускорение свободного падения,
ρ - плотность воды,
fp - резонансная частота камеры с вспомогательным сосудом.
На рисунке схематически изображено устройство, реализующее изобретение.
В измерительной камере 1 закреплены гидрофоны 2, соединенные с прибором 3 регистрации выходного сигнала U. Измерительная камера гибким шлангом 4 соединена с вспомогательным сосудом 5, который совершает синусоидальные колебания.
Устройство работает следующим образом. После того как в измерительную камеру 1 и вспомогательный сосуд 5 заливается вода, вспомогательный сосуд 5 по действием привода начинает совершать синусоидальные колебания, имеющие вертикальную составляющую, значение которой ho, при этом снимают показания выходного сигнала U гидрофона 2 с помощью регистрирующего прибора 3. Изменяя частоту f синусоидальных колебаний вспомогательного сосуда 5, добиваются нулевого значения выходного сигнала гидрофона, фиксируя при этом частоту колебаний вспомогательного сосуда fo, при которой инерционная составляющая изменения давления в измерительной камере полностью компенсируется гидростатическим давлением. После этого гидрофон градуируют на любых частотах диапазона, а градуировочный коэффициент M определяют из соотношения (1).
Предлагаемый способ градуировки гидрофонов отличается повышенной точностью по причине того, что значение частоты нулевого сигнала fo оперативно определяется с пренебрежимо малой погрешностью, и поскольку процесс градуировки прост в реализации, это позволяет автоматизировать процесс абсолютной градуировки гидрофонов, что также повышает воспроизводимость результатов градуировки.
Способ градуировки гидрофонов реализуется устройством, содержащим измерительную камеру с водой, в которой закреплены градуируемые гидрофоны. Измерительная камера соединена гибким шлангом со вспомогательным сосудом с водой. При периодическом синусоидальном перемещении вспомогательного сосуда в вертикальном направлении с помощью электрического привода в измерительной камере возникают периодические изменения давления, которые преобразуются в выходной сигнал. Наряду с гидростатическим давлением, которое рассчитывается по простой формуле, на гидрофон действует другая составляющая давлений, обусловленная инерцией. Учет этой составляющей и определяет погрешность градуировки. Инерционная составляющая зависит от частоты колебаний вспомогательного сосуда и противоположна по знаку гидростатическому давлению. Поэтому на определенной частоте они компенсируют друг друга и на выходе гидрофона будет нулевой сигнал. Полученное значение частоты нулевого сигнала подставляют в формулу измерения для определения градуировочного коэффициента. Поскольку частотные измерения являются самыми высокоточными, то градуировка гидрофонов предлагаемым способом осуществляется с минимальной погрешностью. Процесс градуировки прост в реализации, это позволяет автоматизировать процесс абсолютной градуировки гидрофонов, что также повышает воспроизводимость результатов градуировки. 1 ил.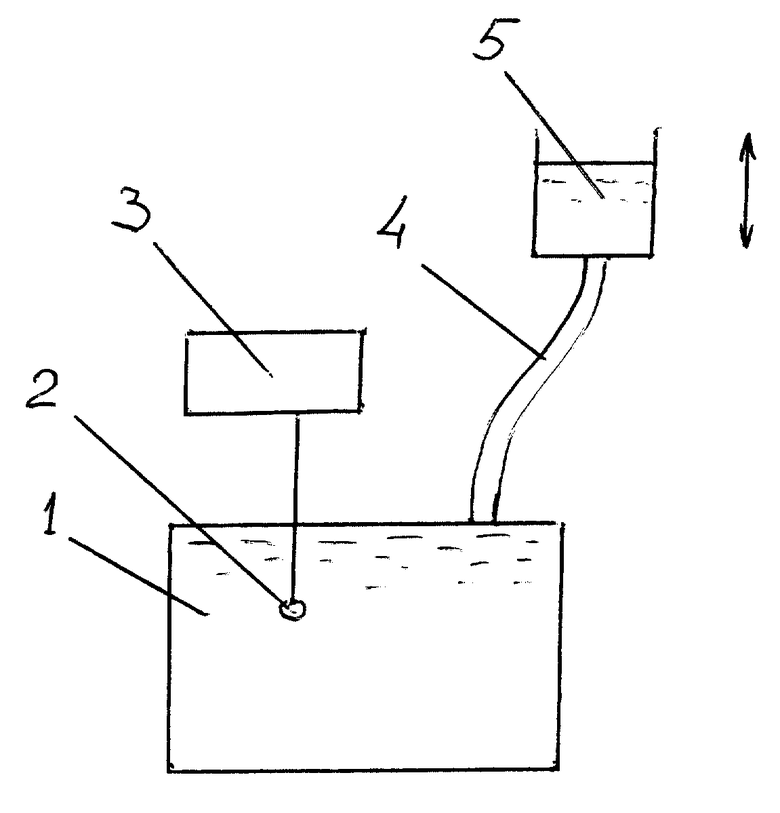
Способ градуировки гидрофонов, заключающийся в измерении амплитуды вертикального перемещения h0 вспомогательного сосуда с водой относительно измерительной камеры с гидрофоном, отличающийся тем, что, с целью повышения точности градуировки, определяют частоту fо перемещения вспомогательного сосуда, при которой выходной сигнал гидрофона U равен нулю, затем градуировочный коэффициент М гидрофона на частоте f определяют из соотношения
где q - ускорение свободного падения;
ρ - плотность воды;
fр - резонансная частота системы, состоящей из измерительной камеры и вспомогательного сосуда.
| Голенков А.Н | |||
| Абсолютная градуировка приемников инфразвукового давления | |||
| Ж.: Измерительная техника, N 5, 1965, c.43 | |||
| Способ абсолютной калибровки инфразвуковых гидрофонов в маятниковых камерах | 1977 |
|
SU664046A1 |
| US 3859620 A, 07.01.75 | |||
| Способ градуировки гидрофонов | 1979 |
|
SU822387A1 |
| Способ градуировки гидрофонов | 1982 |
|
SU1078673A1 |
