Изобретение относится к электроизмерительной технике, а конкретно к мостовым методам измерения на переменном токе параметров трехэлементных двухполюсников.
Известен способ измерения параметров трехэлементных двухполюсников частотно-независимыми мостами переменного тока по а. с. N 158627 (СССР, МКИ G 01 R 27/02, Б.И. N 22, 1963 г.), который состоит из ряда уравновешиваний моста регулировками двух разнородных параметров плеча сравнения на заданной частоте при устанавливаемых значениях третьего параметра плеча сравнения по углу наклона и ширине появляющегося на экране включенного в измерительную диагональ по фазочувствительной схеме осциллографа эллипса при отклонении частоты питания от заданной частоты после очередного уравновешивания моста по амплитуде. Недостаток способа заключается в большой продолжительности измерения из-за отсутствия однозначного соответствия между углом наклона эллипса и знаком отклонения упомянутого третьего параметра плеча сравнения. Другой недостаток заключается в низкой точности измерения из-за весьма большого порога чувствительности используемого при уравновешивании моста по трем параметрам широкополосного нуль-индикатора, каковым является упомянутый осциллограф.
Известен выбранный за прототип способ измерения параметров трехэлементных двухполюсников частотно-независимыми мостами переменного тока по а. с. N 849100 (СССР), МКИ G 01 R 27/02, Б.И. N 27, 1981 г., по которому частотно-независимое состояние равновесия, являющееся измерительным, достигают после установки ряда частотно-зависимых состояний равновесия по амплитуде на первой частоте регулировками двух параметров плеча сравнения с углом сходимости по ним, равным 90o, при задаваемых значениях третьего параметра плеча сравнения по знаку фазы сигнала разбаланса относительно опорного напряжения. Недостаток прототипа заключается в использовании фазочувствительного нуль-индикатора для фиксации измерительного частотно-независимого состояния равновесия моста. Недостаток этот обусловлен тем, что по прототипу направление регулирующих воздействий по изменению третьего параметра плеча сравнения определяют по знаку информативной проекции сигнала разбаланса моста на второй частоте и фиксация по прототипу измерительного частотно-независимого состояния равновесия с помощью существенно более чувствительного амплитудного нуль-индикатора (или, что то же самое, экстремум-детектора) невозможна. Объясняется это тем (см. книгу Новика А. И. "Системы автоматического уравновешивания цифровых экстремальных мостов переменного тока", - Киев: Наук. думка. 1983. С. 5), что нуль-индикаторы, чувствительные к фазе, не могут иметь сколь угодно малый порог чувствительности вследствие значительных фазовых искажений в применяемых в них избирательных узкополосных усилителях из-за весьма крутой фазочастотной характеристики последних. Нуль-индикаторы же, реагирующие только на амплитуду сигнала, свободны от этого ограничения и могут иметь сколь угодно большую избирательность, то есть сколь угодно малый порог чувствительности. Кроме того, используемая по прототипу информативная проекция сигнала разбаланса может быть существенно меньше амплитуды сигнала разбаланса, что также ведет к уменьшению точности фиксации частотно-независимого состояния равновесия моста для измерения параметров трехэлементных двухполюсников из-за влияния высших гармоник, наводок и шумов на показания фазочувствительного нуль-индикатора.
Сущность изобретения заключается в повышении точности измерения параметров трехэлементных двухполюсников частотно-независимыми мостами переменного тока.
Этот технический результат при осуществлении изобретения достигается в известном по а. с. N 849100 способе измерения параметров трехэлементных двухполюсников частотно-независимыми мостами переменного тока, содержащем операции уравновешивания на первой частоте по двум параметрам с углом сходимости по ним, равным 90o, при задаваемых значениях третьего параметра плеча сравнения по сигналу разбаланса, появляющемуся после перевода уравновешенного моста на вторую частоту.
Особенность заключается в том, что по окончании уравновешиваний моста по трем параметрам с использованием знака информативной проекции сигнала разбаланса на второй частоте размер регулирующих воздействий по изменению третьего параметра плеча сравнения определяют по модулю упомянутого сигнала разбаланса, а их направление выбирают по знаку приращений этого модуля при пробном изменении третьего параметра плеча сравнения относительно установленного его значения.
Другая сущность изобретения состоит в уменьшении продолжительности измерения.
Этот второй технический результат в заявляемом способе достигается за счет второй его особенности, заключающейся в том, что при регулировании третьего плеча сравнения по знаку информативной проекции сигнала разбаланса на второй частоте одновременно с задаваемым его значением устанавливают значения первого и второго параметров плеча сравнения из условия сохранения равновесия моста на первой частоте.
Второй технический результат в заявляемом способе достигается также за счет третьей его особенности, которая состоит в том, что по мере приближения к частотно-независимому состоянию равновесия моста при регулировании третьего параметра плеча сравнения помимо знака используют и модуль информативной проекции сигнала разбаланса на второй частоте.
Проведенный заявителями анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявители не обнаружили источник, характеризующийся признаками, тождественными всем существенным признакам заявленного изобретения. Определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволило установить совокупность существенных по отношению к усматриваемому заявителями техническому результату отличительных признаков в заявленном способе, изложенных в формуле изобретения.
Следовательно, заявленное изобретение соответствует условию "новизна".
Для проверки соответствия заявленного изобретения условию "изобретательский уровень" заявители провели дополнительный поиск известных решений, чтобы выявить признаки, совпадающие с отличительными от прототипа признаками заявленного способа. Результаты поиска показали, что заявленное изобретение не вытекает для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителями, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований для достижения технического результата, в частности, заявленным изобретением не предусматриваются следующие преобразования:
дополнение известного способа какой-либо известной частью, присоединяемой к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
создание способа, состоящего из известных частей, выбор которых и связь между которыми осуществляется на основе известных правил, рекомендаций и достигаемый при этом технический результат обусловлен только известными свойствами частей этого способа и связей между ними.
Описываемое изобретение не основано на изменении количественного признака (признаков), представлении таких признаков во взаимосвязи либо изменении ее вида, имеется в виду случай, когда известный факт влияния каждого из указанных признаков на технический результат, новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, закономерностей.
Следовательно, заявленный способ соответствует условию "изобретательский уровень"
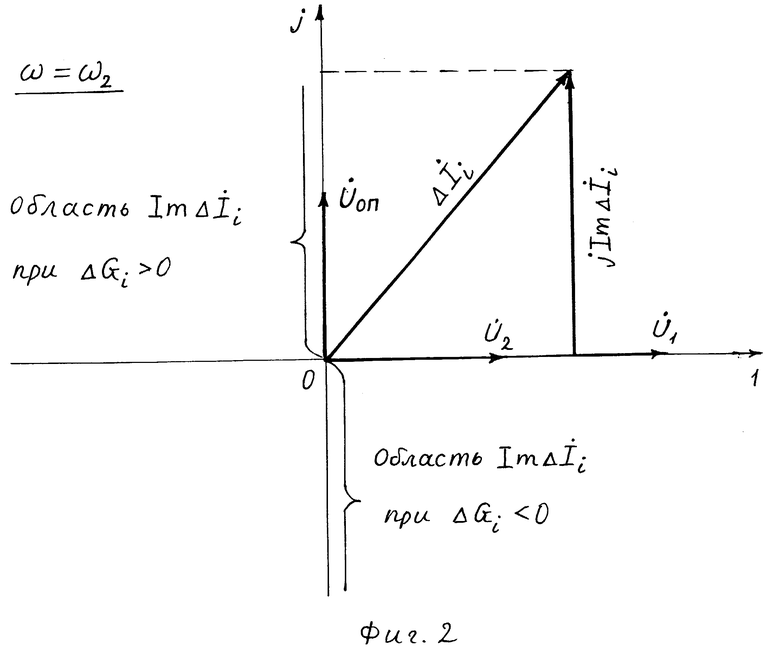
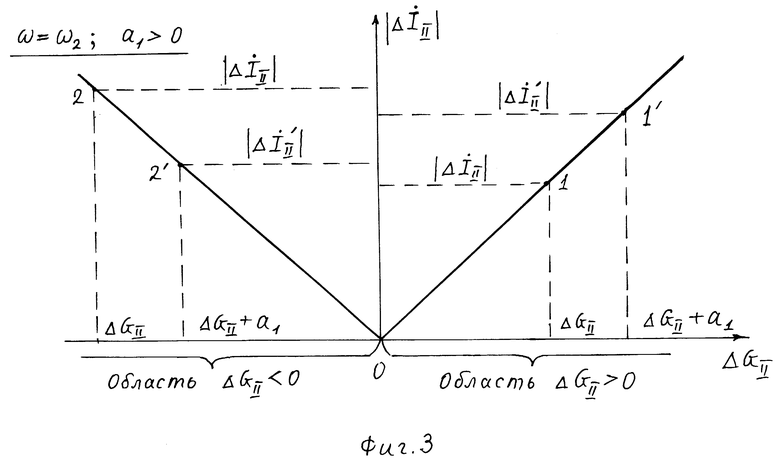
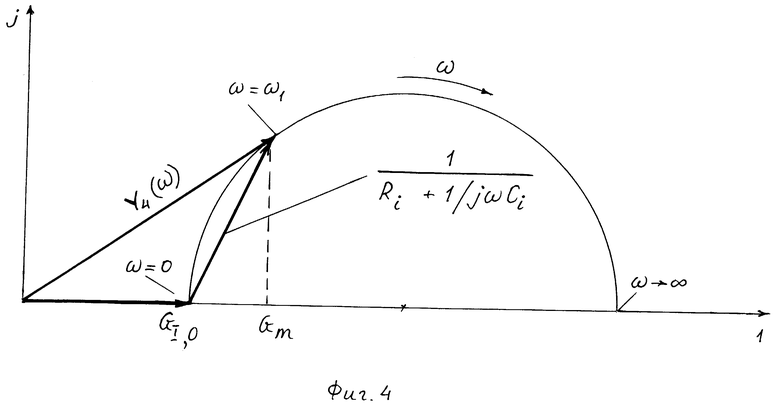
На фиг. 1 изображена схема моста, реализующего заявляемый способ в случае измерения параметров трехэлементных двухполюсников по параллельно-последовательной GRC-схеме. На фиг. 2 показаны области расположения информативных проекций тока разбаланса моста (фиг. 1) на второй частоте при проведении первого этапа измерительной процедуры по заявляемому способу. На фиг. 3 показана зависимость модуля тока разбаланса моста (фиг. 1) на второй частоте от размера отклонения третьего параметра плеча сравнения от его отсчитываемого значения при проведении второго этапа измерительной процедуры по заявляемому способу. На фиг. 4 показан частотный годограф комплексной проводимости плеча сравнения в конце первого этапа измерительной процедуры.
На фиг. 1 обозначено: 1, 2, 3 - резистор переменного сопротивления, конденсатор переменной емкости, резистор переменной проводимости, параметры которых - соответственно R, С, G - являются первым, вторым и третьим регулируемыми параметрами плеча сравнения 4; 5 - плечо измерения, содержащее измеряемый GRC-двухполюсник, представляемый параллельным соединением последовательно включенных между собой резистора 6 (Rx), конденсатора 7 (Cx) с резистором 8 (Gx); 9, 10, 16, 17 - зажимы для подключения плеча измерения 5, плеча сравнения 4 к источникам синфазных напряжений  11, 13 - опорный и измерительный входы фазочувствительного нуль-индикатора 12; 14 - переключатель на два положения "A" и "Ф"; 15 - амплитудный нуль-индикатор;
11, 13 - опорный и измерительный входы фазочувствительного нуль-индикатора 12; 14 - переключатель на два положения "A" и "Ф"; 15 - амплитудный нуль-индикатор;  выходные токи плеча сравнения 4 и плеча измерения 5; 18 - ключ;
выходные токи плеча сравнения 4 и плеча измерения 5; 18 - ключ;  - разность токов плеч сравнения и измерения.
- разность токов плеч сравнения и измерения.
Амплитудный нуль-индикатор 15 предназначен для фиксации измерительного частотно-независимого состояния равновесия моста.
Входное сопротивление амплитудного нуль-индикатора 15 и фазочувствительного нуль-индикатора 12 по измерительному его входу 13 являются достаточно малыми по сравнению с выходным сопротивлением моста (фиг. 1) между вершинами измерительной диагонали ab. Оба индикатора (15 и 12) являются избирательными и оба чувствительны к току. Функция фазочувствительного нуль-индикатора 12 заключается в определении знака и модуля информативной проекции тока разбаланса моста (фиг. 1) на второй частоте при проведении первого этапа измерительной процедуры заявленного способа. Функции амплитудного нуль-индикатора 15 на второй частоте при проведении второго этапа измерительной процедуры заявленного способа заключаются в определении модуля тока разбаланса моста (фиг. 1), а также в определении знака приращения этого модуля при подаче пробных воздействий по изменению третьего параметра плеча сравнения 4. Фазочувствительный нуль-индикатор 12 на первом этапе, а амплитудный нуль-индикатор 15 на втором этапе измерительной процедуры заявляемого способа фиксируют равновесие моста на второй частоте в соответствии со своими порогами чувствительности по току. Помимо указанных функций амплитудный нуль-индикатор 15 на первой частоте выполняет функции известных экстремум-детекторов (см. , например, вышеприведенную книгу Новика А.И., стр. 186) при проведении операций уравновешивания моста по двум разнородным параметрам, то есть определяет в соответствии с пробными воздействиями по изменению каждого из этих двух параметров знак приращения модуля тока разбаланса и формирует с соответствующей селекцией регулирующие воздействия по изменению первого и второго параметров плеча сравнения 4, а также фиксирует равновесие моста (фиг. 1) на первой частоте по амплитуде.
Напряжения  снимаются со вторичных обмоток трехобмоточного трансформатора напряжения с тесной индуктивной связью, подсоединенного первичной обмоткой к генератору синусоидального напряжения. Благодаря этому
снимаются со вторичных обмоток трехобмоточного трансформатора напряжения с тесной индуктивной связью, подсоединенного первичной обмоткой к генератору синусоидального напряжения. Благодаря этому  где w1, w2 - числа витков вторичных обмоток указанного трансформатора.
где w1, w2 - числа витков вторичных обмоток указанного трансформатора.
На фиг. 2 обозначено:  информативная проекция тока разбаланса
информативная проекция тока разбаланса  на опорное напряжение
на опорное напряжение  появляющегося на частоте ω2 после перевода на нее уравновешенного на первой частоте моста при установленном значении Gi третьего параметра плеча сравнения 4. Проекцию эту выделяют фазочувствительным нуль-индикатором 12.
появляющегося на частоте ω2 после перевода на нее уравновешенного на первой частоте моста при установленном значении Gi третьего параметра плеча сравнения 4. Проекцию эту выделяют фазочувствительным нуль-индикатором 12.
На фиг. 3 обозначено  модуль тока разбаланса моста (фиг. 1) на второй частоте при проведении второго этапа; 0 - начало координат;
модуль тока разбаланса моста (фиг. 1) на второй частоте при проведении второго этапа; 0 - начало координат;  размер отклонения на втором этапе третьего параметра G от его отсчитываемого в конце измерения значения Go (отрицательные отклонения ΔGп откладываются слева от начала координат).
размер отклонения на втором этапе третьего параметра G от его отсчитываемого в конце измерения значения Go (отрицательные отклонения ΔGп откладываются слева от начала координат).
На фиг. 4 обозначено: Y4(ω) - комплексная проводимость плеча сравнения; Gm - верхняя граница диапазона регулирования третьего параметра.
Мост (фиг. 1) описывается следующим уравнением равновесия:
Если уравнение (1) справедливо хотя бы для двух частот, мост (фиг. 1) находится в частотно-независимом состоянии равновесия по амплитуде, являющемся измерительным, и производится отсчет измеряемых параметров по формулам:
Rx = (w2/w1)Ro, (2)
Cx = (w1/w2)Co, (3)
Gx = (w1/w2)Go, (4)
где Ro, Co, Go - отсчеты первого, второго и третьего параметров R, С, G плеча сравнения 4. Из формул (2) - (4) видно, что мост характеризуется раздельным отсчетом всех трех измеряемых параметров. Кроме того пределы измерения расширяются путем изменения отношения чисел витков, нуль-индикатор (12 или 15) имеет общую с источниками напряжений  заземленную точку b, то есть мост (фиг. 1) обладает известными положительными свойствами трансформаторных мостов. Поскольку регулируемые элементы 1, 2 находятся в одной ветви, то угол сходимости моста по первому и второму регулируемым параметрам (R и C) равен 90o.
заземленную точку b, то есть мост (фиг. 1) обладает известными положительными свойствами трансформаторных мостов. Поскольку регулируемые элементы 1, 2 находятся в одной ветви, то угол сходимости моста по первому и второму регулируемым параметрам (R и C) равен 90o.
Измерительная процедура по заявляемому способу состоит из двух этапов. На первом этапе, как и по прототипу, для установки частотно-независимого состояния равновесия используют фазочувствительный нуль-индикатор, а на втором этапе, в отличие от прототипа, для фиксации измерительного частотно-независимого состояния равновесия используют существенно более чувствительный амплитудный нуль-индикатор. Процесс уравновешивания по трем параметрам, состоящий из указанных двух этапов, протекает следующим образом.
В начале первого этапа проводят предварительное уравновешивание моста (фиг. 1) на частоте ω1 для определения верхней границы диапазона регулирования третьего параметра. Для этого в измерительную диагональ ab включают амплитудный нуль-индикатор 15 с помощью переключателя 14, переводимого в положение "A", и замыкают ключ 18. После уравновешивания моста регулировками второго и третьего параметров C = var и G = var получают следующее частотно-зависимое уравнение равновесия:
где Gm - верхняя граница диапазона регулирования (см. фиг. 4) третьего параметра.
Значения Gm и Cm запоминают. Далее ключ 18 размыкают и в соответствии с прототипом проводят ряд уравновешиваний моста на первой заданной частоте ω1 регулировками первого и второго параметров при задаваемых значениях третьего параметра плеча сравнения 4 (параметра G) в диапазоне (0, Gm) по знаку информативной проекции сигнала разбаланса, появляющегося после перевода уравновешенного на первой частоте моста на вторую заданную частоту ω2= kω1, то есть по знаку мнимой составляющей тока разбаланса  (Здесь и далее k - вещественное положительное число).
(Здесь и далее k - вещественное положительное число).
При уравновешиваниях моста на частоте ω1 переключатель 14 находится в положении "A" и в измерительную диагональ ab включен амплитудный нуль-индикатор 15, по показаниям которого фиксируют равновесие моста по амплитуде. При переходе на частоту ω2 переключатель 14 переводят в положение "Ф" и в измерительную диагональ ab включается фазочувствительный нуль-индикатор 12, с помощью которого выделяют информативную проекцию  (см. фиг. 2).
(см. фиг. 2).
Регулировки третьего параметра на первом этапе основаны на следующей зависимости, имеющей место для моста (фиг. 1), уравновешенного на частоте ω1, a именно:
где i - номер операции уравновешивания на частоте ω1 регулировками R = var, C = var;
ΔGi= Gi-Go - отклонение выставленного значения Gi третьего параметра от отсчитываемого в конце измерительной процедуры его значения Go, то есть истинного его значения;
tgϕ1i= 1/ω1RiCi, (7)
причем Ri, Ci - значения первого и второго параметров плеча сравнения, соответствующие равновесию моста (фиг. 1) по амплитуде на частоте ω1 при выставленном значении третьего параметра Gi;
tgϕ10= 1/ω1R0C0= 1/ω1RxCx (8)
(см. формулы (2) - (4)).
Как следует из являющегося точным выражения (6), знак информативной проекции тока разбаланса на частоте ω2 связан со знаком отклонения третьего параметра ΔGi однозначно как при малых, так и при больших размерах отклонения третьего параметра от его отсчитываемого значения Go. Благодаря этому выбор направления регулирующих воздействий по изменению третьего параметра G на первом этапе в диапазоне (0, Gm) не вызывает затруднений в общем случае.
Третий параметр плеча сравнения регулируют, например, по методу взвешивания. Новое значение его определяют по формуле:
Первый этап заканчивают при достижении нулевого показания фазочувствительного нуль-индикатора 12 на частоте ω2, то есть при достижении неравенства
где E12 - порог чувствительности по току фазочувствительного нуль-индикатора 12.
В конце первого этапа осуществляют контроль неравенства
Gm - GI,0> > 3hI,min (11)
где GI,0 - значение третьего параметра, соответствующее достижению нулевого показания фазочувствительного нуль-индикатора 12;
hI,min - наименьшая на первом этапе ступень квантования третьего параметра G плеча сравнения 4.
Если вместо (11) имеет место неравенство
Gm - GI,0> > hI,min, (11, а)
(этот случай соответствует положению конца вектора Y4(ω) = Gi+1/(Ri+1/jωCi) в начале частотного годографа вектора 1/(Ri+1/jωCi), (см. фиг. 4), то проводят одну-две итерации первого этапа при большем значении частоты ω1, так как при этом (см. фиг. 4) конец вектора Y4(ω1), скользя по полуокружности, являющейся частотным годографом вектора 1/(Ri+1/jωCi), смещается вправо. При этом разность Gm - GI,0 быстро растет, и следовательно, становится легко выполнимым неравенство (11). Второй этап проводится в этом случае также при большем значении частоты ω1.
Второй этап процесса уравновешивания по трем параметрам R, С, G проводят по показаниям только амплитудного нуль-индикатора 15. Ключ 14 постоянно находится в положении "A". Ключ 18 разомкнут. Регулировку третьего параметра G проводят на основе зависимости
где  модуль тока разбаланса, возникающего при переводе на вторую частоту уравновешенного на первой частоте моста при установленном на втором этапе значении GII третьего параметра плеча сравнения;
модуль тока разбаланса, возникающего при переводе на вторую частоту уравновешенного на первой частоте моста при установленном на втором этапе значении GII третьего параметра плеча сравнения;
ΔGII= GII-Go - отклонение на втором этапе третьего параметра от отсчитываемого его значения (истинного значения);
δII= ΔGII/(Gm-Go); (13)
b = ω1Cm/(Gm-Go). (14)
На основе точной зависимости (12) при наличии неравенства
между размером отклонения третьего параметра и модулем тока разбаланса существует линейная связь
график которой показан на фиг. 3 как при положительных, так и отрицательных отклонениях ΔGII.
Выполнение неравенства (11) в конце первого этапа всегда влечет за собой выполнение (см. формулу (13)) на втором этапе неравенства (15), так как уже в начале второго этапа
а при его повторном проведении
Кроме того, для монотонного возрастания функции (12) от переменной δII достаточно выполнения менее сильного неравенства, чем неравенство (15), а именно:
Неравенство же (19) при наличии неравенства (11) выполняется с достаточно большим запасом (см. выражения (11), (13), (17)).
Второй этап протекает следующим образом. При найденном в конце первого этапа значении третьего параметра, то есть при
GII = GI,0 (20)
мост (фиг. 1) уравновешивают по амплитуде на частоте ω1 регулировками R = var, C = var. Затем мост переводят на частоту ω2= kω1 и по показаниям амплитудного нуль-индикатора 15 запоминают значение модуля появившегося тока разбаланса  (см. ординату точки 1, а также точки 2 на фиг. 3) и по формуле (16) определяют размер имеющего место при первом проведении второго этапа отклонения третьего параметра
(см. ординату точки 1, а также точки 2 на фиг. 3) и по формуле (16) определяют размер имеющего место при первом проведении второго этапа отклонения третьего параметра  Далее дают пробное изменение третьему параметру, то есть устанавливают значение его, равное
Далее дают пробное изменение третьему параметру, то есть устанавливают значение его, равное
G'II = GII + aI = GI,0 + a1, (21)
где a1 - пробное изменение третьего параметра при первом проведении второго этапа, причем a1 < < hI,min, и уравновешивают мост по амплитуде регулировками R = var, C = var на частоте ω1. Затем мост снова переводят на частоту ω2. По показаниям амплитудного нуль-индикатора 15 запоминают значение модуля появившегося тока разбаланса  (см. ординату точки 1', а также точки 2' на фиг. 3) и сравнивают его со значением
(см. ординату точки 1', а также точки 2' на фиг. 3) и сравнивают его со значением  которое было в отсутствие пробного изменения aI.
которое было в отсутствие пробного изменения aI.
Если в результате сравнения получено (см. точки 1, 1' на фиг. 3 и правую полуось абсцисс) неравенство
при пробном изменении a1 > 0, то имеет место положительное отклонение третьего параметра плеча сравнения
ΔGII>0. (23) (23)
Если же в результате сравнения получено (см. точки 2, 2' и левую полуось абсцисс) неравенство
то при a1 > 0 имеет место отрицательное отклонение третьего параметра
ΔGII<0 (25)
Определив размер  и знак signΔGII, далее осуществляют регулирующее воздействие по изменению третьего параметра, равное по размеру
и знак signΔGII, далее осуществляют регулирующее воздействие по изменению третьего параметра, равное по размеру  и являющееся противоположным выявленному знаку signΔGII, то есть устанавливают значение третьего параметра по формуле
и являющееся противоположным выявленному знаку signΔGII, то есть устанавливают значение третьего параметра по формуле
После чего мост регулировками R = var, C = var на частоте ω1 уравновешивают по амплитуде и переводят на частоту ω2.
Если при этом показание амплитудного нуль-индикатора 15 будет нулевым, то есть будет выполняться и на частоте ω1, и на частоте ω2 неравенство
где E15 - порог чувствительности амплитудного нуль-индикатора 15, второй этап завершен и производится отсчет третьего параметра плеча сравнения 4 по формуле
Go = GII,0, (28)
a также отсчет первого и второго параметров плеча сравнения по формулам
Ro = RII,0, (29)
Co = CII,0, (30)
где RII,0 - значения первого и второго параметров плеча сравнения 4, соответствующие равновесию моста по амплитуде на частоте ω1 при установленном значении третьего параметра GII,0.
Если показание амплитудного нуль-индикатора 15 не будет нулевым на частоте ω2, то это показание запоминают и повторно проводят второй этап. Для этого дают пробное изменение третьему параметру плеча сравнения, то есть устанавливают
G'II = GII,0 + a2, (31)
где GII,0 - значение третьего параметра плеча сравнения 4, полученное при первом проведении второго этапа; a2 - пробное изменение третьего параметра, причем a2 < < a1,
и уравновешивают на частоте ω1 мост по амплитуде регулировками R = var, C = var. Затем переводят мост на частоту ω2 и запоминают показание амплитудного нуль-индикатора при наличии пробного изменения a2 третьего параметра. Далее описанным образом (см. выражения (16), (22) - (25)) определяют размер и знак отклонения третьего параметра, имеющие место при повторении второго этапа, после чего по формуле (26) определяют значение третьего параметра, устанавливают его, уравновешивают мост на частоте ω1 (R = var, C = var), переводят его на частоту ω2 и убеждаются в наличии неравенства (27).
Если неравенство (27) выполнено на частотах ω1,ω2, то по формулам (28) - (30) отсчитывают значения третьего, первого, второго параметров и определяют по ним искомые параметры измеряемого GRC-двухполюсника по формулам (2) - (4).
Таким образом, измерительное частотно-независимое состояние равновесия моста (фиг. 1) по заявляемому способу устанавливается по показаниям амплитудного нуль-индикатора как на первой частоте, так и на второй частоте. Благодаря этому и достигается существенно большая точность измерения параметров трехэлементных двухполюсников по сравнению с прототипом, по которому измерительное частотно-независимое состояние равновесия моста на второй частоте фиксируется только по показаниям фазочувствительного нуль-индикатора 12, имеющего существенно больший порог чувствительности по току, чем амплитудный нуль-индикатор 15, а именно:
E12 > E15. (32)
Меньшая продолжительность измерения, чем у прототипа, обусловлена второй особенностью заявляемого способа. В случае измерения параметров GRC-двухполюсников мостом (фиг. 1) заключается она в следующем.
После определения верхней границы диапазона регулирования третьего параметра (см. уравнение равновесия (5)) на первом этапе одновременно с установкой очередного значения Gi+1 по формуле (9) в соответствии со знаком проекции  устанавливают значения первого и второго параметров по формулам
устанавливают значения первого и второго параметров по формулам
Ri+1= (Gm-Gi+1)/[(Gm-Gi+1)2+ω
Ci+1= Cm+[(Gm-Gi+1)2/ω
Так, при i+1 = 1 устанавливают значения
G1 = Gm/21,
R1= (Gm-G1)/[(Gm-G1)2+ω
C1= Cm+[(Gm-G1)2/ω
Далее определяют знак проекции  и при i+1 = 2 устанавливают значения
и при i+1 = 2 устанавливают значения
R2= (Gm-G2)/[(Gm-G2)2+ω
C2= Cm+[(Gm-G2)2/ω
Вновь определяют знак проекции  и при i+1 = 3 устанавливают G3, R3, C3 по формулам (9), (33), (34) и т.д.
и при i+1 = 3 устанавливают G3, R3, C3 по формулам (9), (33), (34) и т.д.
При выставленных одновременно значениях Gi+1, Ri+1, Ci+1 (ключ 18 после предварительного уравновешивания разомкнут) ток плеча сравнения 4 на частоте ω1 записывается как
то есть является равным току плеча измерения на частоте ω1 (см. в уравнении (5) левую и правую части), вследствие чего по заявляемому способу становится не нужным перевод моста на частоту ω1 и уравновешивание его регулировками первого и второго параметров R = var, C = var при установленном очередном значении третьего параметра Gi+1. Не нужными становятся и обратные переводы моста с частоты ω1 на частоту ω2. Следовательно, по сравнению с прототипом сокращается продолжительность измерения за счет исключения операций уравновешивания моста на первой частоте по двум параметрам и операций по переводу моста с одной частоты на другую.
По проведении после предварительного уравновешивания 6 описанных итераций первого этапа по заявляемому способу корректируют значения Gm, Cm, используемые в формулах (33), (34). Осуществляется эта коррекция при очередной установленной совокупности Gi+1, Ri+1,Ci+1 путем перевода моста на частоту ω1 и в доуравновешивании его регулировками первого и второго параметров R = var, C = var. Скорректированные значения записываются как

где Ri+1 к, Ci+1 к - значения первого и второго параметров, полученные при доуравновешивании моста на частоте ω1.
Мост с полученными при проведении коррекции значениями первого и второго параметров Ri+1 к, Ci+1 к при выставленном значении Ci+1 переводят на частоту ω2 и по показаниям фазочувствительного нуль-индикатора 12 определяют знак проекции  . Затем вычисляют по формулам (9), (33), (34), в которых вместо значений Gm, Cm используются скорректированные значения Gm к, Cm к, новую совокупность значений Gi+2, Ri+2, Ci+2, устанавливают эти значения и определяют знак проекции
. Затем вычисляют по формулам (9), (33), (34), в которых вместо значений Gm, Cm используются скорректированные значения Gm к, Cm к, новую совокупность значений Gi+2, Ri+2, Ci+2, устанавливают эти значения и определяют знак проекции  Эти итерации первого этапа продолжают до установления неравенства (10).
Эти итерации первого этапа продолжают до установления неравенства (10).
Операция коррекции, как следует из ее описания, совпадает с очередной по прототипу операцией уравновешивания моста на частоте ω1 при значении третьего параметра Gi+1 и по сравнению с прототипом она не влечет за собой увеличения продолжительности измерения.
Необходимость в коррекции значений Gm, Cm (а затем и значений Gm к, Cm к после i = 12) обусловлена тем, что в начале первого этапа при числе итераций i < 6 мост находится еще далеко от частотно-независимого состояния равновесия и на показания амплитудного нуль-индикатора 15 на частоте ω1 существенное влияние оказывают высшие гармоники и наводки. Вследствие этого при предварительном уравновешивании значения Gm, Cm могут быть найдены со значительной погрешностью. Эта погрешность существенно снижается при первой коррекции и до пренебрежимо малых значений снижается при второй коррекции, так как вторая коррекция может проводиться уже при максимальной чувствительности на частоте ω1 амплитудного нуль-индикатора 15, так как мост близок к частотно-независимому состоянию равновесия.
Находимые в конце первого этапа значения первого и второго параметров по формулам (33), (34) после проведения указанных коррекций значений Gm, Cm, а затем Gm к, Cm к достаточно точно соответствуют состоянию равновесия моста (фиг. 1) на частоте ω1 при выставленном значении третьего параметра.
Отметим, что в формулах (11), (11,а), (12), (13), (14), как и в формулах (33), (34), вместо значений Gm, Cm, полученных по уравнению (5), используются скорректированные значения Gm к, Cm к.
Таким образом, благодаря одновременной установке значений трех параметров плеча сравнения по знаку проекции сигнала разбаланса на второй частоте из условия сохранения равновесия моста на первой частоте заявляемый способ по сравнению с прототипом характеризуется существенно меньшим числом операций уравновешивания по двум параметрам на первой частоте, то есть меньшей продолжительностью измерения.
Снижение продолжительности измерения достигается также за счет третьей особенности заявляемого способа. В случае измерения параметров GRC-двухполюсников мостом (фиг. 1) заключается она в использовании по мере приближения моста к частотно-независимому состоянию равновесия также и модуля проекции  при установке нового значения третьего параметра. Осуществляется это следующим образом.
при установке нового значения третьего параметра. Осуществляется это следующим образом.
После проведения 6 описанных итераций первого этапа с использованием только знака проекции  определяют по показаниям фазочувствительного нуль-индикатора 12 не только знак, но и модуль проекции
определяют по показаниям фазочувствительного нуль-индикатора 12 не только знак, но и модуль проекции  при установленной очередной совокупности значений Gi, Ri, Ci, при которой мост на частоте ω1 находился в состоянии равновесия по амплитуде. Затем определяют новое значение третьего параметра Gi+1. Вместо выражения (9) используют для этого формулу
при установленной очередной совокупности значений Gi, Ri, Ci, при которой мост на частоте ω1 находился в состоянии равновесия по амплитуде. Затем определяют новое значение третьего параметра Gi+1. Вместо выражения (9) используют для этого формулу
где tgϕ1i находится по формуле (7).
Установив указанное значение Gi+1, мост переводят на частоту ω1 и уравновешивают его регулировками R = var, C = var. Затем мост переводят на частоту ω2. Если на этой частоте при значении Gi+1 и значениях Ri+1, Ci+1, при которых на частоте ω1 мост был уравновешен, фазочувствительный нуль-индикатор 12 будет иметь нулевое показание, то первый этап закончен. По формуле (36) определяется значение Gm к по найденным значениям Gi+1, Ri+1, Ci+1 (ставятся вместо значений Ri+1 к, Ci+1 к) и проверяется неравенство (11), в котором вместо Gm ставится Gm к по формуле (36). Далее переходят ко второму этапу процесса уравновешивания по трем параметрам.
Если же при установленной совокупности Gi+1, Ri+1, Ci+1 фазочувствительный нуль-индикатор 12 будет на частоте ω2 иметь отличное от нуля показание, то определяют знак и размер проекции  и по формуле (38) находят новое значение
и по формуле (38) находят новое значение
где tgϕ1(i+1)= 1/ω1Ri+1Ci+1. Мост переводят на частоту ω1, доуравновешивают регулировками R = var, C = var при установленном значении Gi+2. Мост далее переводят на частоту ω2 и определяют знак и модуль проекции  Если показание фазочувствительного нуль-индикатора 12 будет нулевым, то первый этап закончен.
Если показание фазочувствительного нуль-индикатора 12 будет нулевым, то первый этап закончен.
Если же показание не будет нулевым, то проводят новую итерацию первого этапа с использованием информации о знаке и модуле информативной проекции 
Таким образом, благодаря использованию модуля информативной проекции сигнала разбаланса на второй частоте достигается уменьшение числа итераций первого этапа, то есть достигается уменьшение продолжительности измерения.
Заметим, что в выражении (38) вычитаемое в правой части, определяющее размер регулирующего воздействия по изменению третьего параметра плеча сравнения, получается из точной зависимости (6), если в ней положить
tgϕ1i= tgϕ10, (39)
где tgϕ10 определяется по формуле (8).
Равенство (39) является после 6 итераций первого этапа, проводимых с использованием только знака информативной проекции тока разбаланса на частоте ω2, еще весьма приближенным. После же проведения хотя бы одной итерации первого этапа с использованием и знака, и модуля информативной проекции тока разбаланса, равенство (39) является достаточно точным. При этом становится достаточно точным и размер регулирующего воздействия по изменению третьего параметра с учетом того, что он много меньше значения Gi.
Предельное число тактов уравновешивания по трем параметрам G, R, C при осуществлении первого этапа заявляемого способа с учетом предельного числа тактов уравновешивания при проведении предварительного (см. уравнение (5)) уравновешивания моста на частоте ω1, равного
Nпредв = nG + nC, (40)
(где nG, nC - числа двоичных разрядов параметров G, С), может быть оценено как
N = Nпредв + 6 + 2(n'R + n'C), (41)
где n'R ≤ 5, n'C ≤ 5 - числа используемых младших двоичных разрядов параметров R, С при коррекции значений Gm, Cm и Gm к, Cm к.
По прототипу же предельное число тактов уравновешивания оценивается как
Nпр = nG(nR + nC), (42)
где nG, nR, nC - числа двоичных разрядов параметров G, R, C в полном диапазоне их регулирования.
Следовательно, за счет второй и третьей особенности заявляемого способа продолжительность его первого этапа, эквивалентного прототипу по степени приближения к частотно-независимому состоянию равновесия моста (фиг. 1), по числу тактов уравновешивания не менее, чем на порядок меньше, чем по прототипу (см. выражения (41) и (42).)
Продолжительность второго этапа заявленного способа, как следует из его описания, существенно меньше, чем продолжительность первого этапа заявленного способа, поскольку описанные операции уравновешивания моста (фиг. 1) на частоте ω1 регулировками R = var, C = var осуществляются на втором этапе в младших двоичных разрядах параметров R, C, то есть за 2-5 тактов уравновешивания по каждому из этих параметров ввиду малости отклонений ΔGп.
Таким образом, заявляемый способ обеспечивает существенное по сравнению с прототипом повышение точности измерения параметров трехэлементных двухполюсников и обеспечивает существенное уменьшение продолжительности измерения по сравнению с прототипом.
Реализация заявляемого способа не вызывает затруднений, так как используемый по нему амплитудный нуль-индикатор (экстремум-детектор), фазочувствительный нуль-индикатор являются типовыми функциональными элементами применяемых для измерения комплексных сопротивлений по двухэлементной схеме цифровых экстремальных и квадратурных мостов (например, мостов Р5083, Р5058). Выполнение необходимых вычислительных операций при реализации описанной измерительной процедуры с помощью микроЭВМ, реализация регулирующих воздействий по изменению параметров плеча сравнения с помощью известных систем уравновешивания, равно как и выполнение плеча сравнения (см. книгу Новика А.И.), также не вызывают принципиальных затруднений.
Заявляемый способ может быть положен в основу высокоточных цифровых экстремальных мостов для измерения с достаточным быстродействием параметров трехэлементных двухполюсников (с потерями) по всем возможным схемам их замещения при любых соотношениях между их параметрами. Такие цифровые мосты могут найти широкое применение в различных сферах народного хозяйства, многих областях науки, медицинской диагностике и т. п. , где объект контроля (емкостные, индуктивные датчики) или исследования (биологические вещества, диэлектрики, полупроводниковые структуры, разнообразные материалы) на переменном токе представляется трехэлементной схемой замещения (существенно более точной, чем используемая на практике двухэлементная схема). Такие мосты могут применяться при контроле технологических параметров и в тех случаях, когда схема замещения датчика является двухэлементной или одноэлементной, но из-за наличия паразитных (то есть неинформативных) параметров конструкции датчика, канала связи результирующая схема замещения является трехэлементной. Такие мосты, естественно, позволят проводить измерения и по одноэлементной, и по двухэлементной схеме замещения.
Заявляемый способ позволит строить высокоточные цифровые мосты с новыми функциональными возможностями по сравнению с известными мостами переменного тока при сохранении функциональных возможностей последних и их метрологических характеристик.
Изобретение относится к электроизмерительной технике, а конкретно к мостовым методам измерения на переменном токе параметров трехэлементных двухполюсников. Сущность изобретения (технический результат) заключается в повышении точности измерения параметров трехэлементных двухполюсников. Другая сущность (технический результат) состоит в уменьшении продолжительности измерения. Для достижения первого технического результата предлагается по окончании уравновешиваний моста на первой частоте с использованием знака информативной проекции сигнала разбаланса на второй частоте размер регулируемых воздействий по изменению одного из трех (третьего) регулируемых параметров плеча сравнения определять по модулю сигнала разбаланса на второй частоте, а их направление выбирать по знаку приращения этого модуля при пробном изменении третьего параметра плеча сравнения относительно установленного его значения. Для достижения второго технического результата предлагается при регулировании третьего параметра плеча сравнения по знаку информативной проекции сигнала разбаланса на второй частоте одновременно с задаваемым его значением устанавливать значения первого и второго параметров плеча сравнения из условия сохранения равновесия моста на первой частоте, а также предлагается по мере приближения к частотно-независимому состоянию равновесия моста при регулировании третьего параметра плеча сравнения помимо знака использовать и модуль информативной проекции сигнала разбаланса на второй частоте. 2 з.п. ф-лы, 4 ил.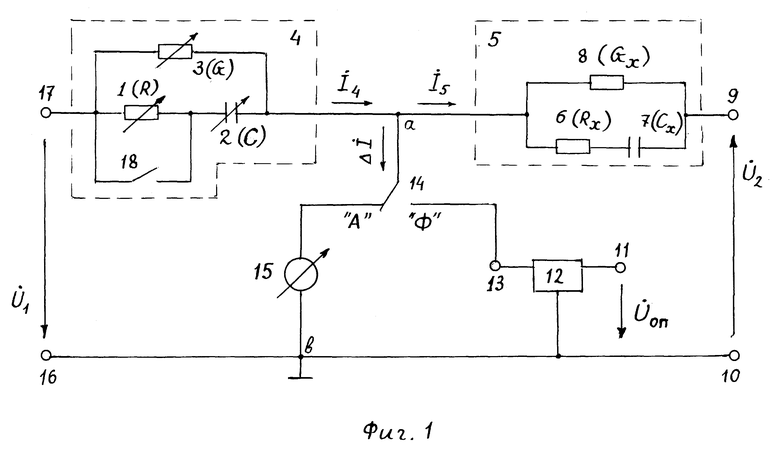
| Способ раздельного измеренияпАРАМЕТРОВ ТРЕХэлЕМЕНТНыХ пАССиВ-НыХ дВуХпОлюСНиКОВ | 1979 |
|
SU849100A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1179337A1 |
| Новак А.И | |||
| Системы автоматического уравновешивания цифровых экстремальных мостов переменного тока | |||
| - Киев: Наукова думка, 1983, с.5. | |||
