Изобретение относится к измерительной технике и может быть использовано для измерения и контроля перемещений.
Известен преобразователь перемещений во временной интервал, содержащий звукопровод, катушку записи, подключенную к генератору импульсов, и катушку считывания [1].
Однако из-за статического разброса времени между стартовыми и стоповыми импульсами преобразователь обладает низкой точностью.
Наиболее близким к изобретению является преобразователь перемещения в код, содержащий магнитострикционную линию с демпферами на концах, электроакустический преобразователь, элемент возбуждения ультразвукового импульса, жестко связанный с объектом контроля, усилитель-формирователь, формирователь импульсов тока, генератор счетных импульсов, счетчик, регистры памяти, буферный формирователь, дешифратор адреса, формирователь запуска, формирователь сигнала готовности, шину обмена и счетчик режима [2].
Его недостатком является низкая точность преобразования, обусловленная конечной шириной спектра импульса считывания, конечным отношением сигнал/шум, а также наличием погрешности квантования.
Целью изобретения является увеличение точности преобразователя перемещений в код без ухудшения динамических свойств.
Поставленная цель достигается тем, что в преобразователь перемещений в код, содержащий звукопровод, на концах которого установлены демпферы, катушку записи, жестко связанную с объектом позиционирования и соединенную с выходом формирователя импульсов записи, катушку считывания, соединенную с входом усилителя импульсов считывания, генератор счетных импульсов, соединенный выходом со счетным входом счетчика, который входом установки в нулевое состояние соединен с линией "Старт", а выходом - с информационным каналом регистра, который тактовым входом соединен с усилителем импульсов считывания, введены генератор пачки импульсов, входом соединенный с линией "Старт", а выходом - с входом формирователя импульсов, устройство управления, запоминающее устройство, входом управления соединенное с первым выходом устройства управления, информационным каналом - с выходом регистра, а выходом - с первым информационным каналом сумматора, вход управления которого соединен со вторым выходом управляющего устройства, и имеющего обратную связь по второму информационному каналу с собственным выходом, при этом под воздействием устройства управления в сумматоре вычисляется среднее значение кода, пропорционального времени распространения ультразвуковой волны от катушки записи до катушки считывания.
Генератор пачки импульсов входом соединен с линией "Старт", а выходом - с формирователем импульса; генератор счетных импульсов соединен выходом со счетным входом счетчика, входом установки в нулевое состояние соединенного с линией "Старт", а выходом - с информационным каналом регистра, соединенного тактовым входом с усилителем. Запоминающее устройство соединено информационным каналом с выходом регистра, управляющим входом - с первым выходом управляющего устройства, а выходом - с первым информационным каналом сумматора, входом управления соединенного со вторым выходом управляющего устройства и имеющего обратную по второму информационному каналу с собственным выходом.
На чертеже приведена структурная схема магнитострикционного преобразователя.
Устройство содержит звукопровод 1, на концах которого установлены демпферы 2, жестко связанную с объектом позиционирования катушку записи 4 и катушку считывания 5 с постоянным магнитом 3, генератор пачки импульсов 6, вход которого соединен с линией "Старт", а выход - с выходом формирователя импульсов записи 7, выходом соединенного с катушкой записи 4, усилитель импульсов считывания 8, соединенный входом с катушкой считывания 5, а выходом с тактовым входом регистра 12, устройство управления 9, соединенное выходами с запоминающим устройством 13 и сумматором 14, генератор счетных импульсов 10, выходом соединенный с входом прямого счета счетчика 11, входом установки в нулевое состояние соединенного с линией "Старт", а выходом - с информационным каналом регистра 12, тактовым входом соединенного с выходом усилителя 8, а выходом - с первым информационным каналом сумматора 14, входом управления соединенного со вторым выходом управляющего устройства 9, имеющего обратную связь по второму информационному каналу с собственным выходом.
Преобразователь работает следующим образом.
Передним фронтом сигнала "Старт" сбрасывается в ноль счетчик 11, на счетный вход которого подается последовательность счетных импульсов с частотой f от генератора 10. Одновременно запускается ждущий генератор 6 пачки импульсов.
Период следования сигналов "Старт"
где Xmax - максимальное перемещение;
V - скорость ультразвука в звукопроводе;
tn - длительность пачки из n импульсов.
С выхода генератора 6 n импульсов поступают на вход формирователя 7, который формирует в катушке записи 4 n импульсов тока. Каждый из этих импульсов возбуждает в звукопроводе 1 в результате прямого эффекта магнитострикции собственную ультразвуковую волну.
По прошествии времени
где x - измеряемое перемещение;
T - период следования импульсов в пачке;
i-я волна наводит в катушке считывания 5 ЭДС, которая усиливается усилителем 8 и, поступая на тактовый вход регистра 12, разрешает запись в него из счетчика 11 кода, пропорционального времени  С выхода регистра 12 код поступает в запоминающее устройство 13.
С выхода регистра 12 код поступает в запоминающее устройство 13.
После прихода n-й ультразвуковой волны в запоминающем устройстве 13 оказываются записанными n кодов, пропорциональных времени, прошедшему от формирования первой упругой волны до достижения i-й волной катушки считывания 5.
Под воздействием устройства управления 9 в сумматоре 14 вычисляется среднее значение кода Nx, пропорционального времени  , распространения ультразвуковой волны по звукопроводу от катушки записи 4 до катушки считывания 5.
, распространения ультразвуковой волны по звукопроводу от катушки записи 4 до катушки считывания 5.
Такие элементы преобразователя, как устройство управления 9, запоминающее устройство 13 и сумматор 14 могут быть, к примеру, реализованы при помощи контроллеров на базе микропроцессоров. При этом в качестве сумматора 14 используется арифметико-логическое устройство (АЛУ) микропроцессора, а алгоритм вычисления значения времени  хранится в виде программы в ПЗУ контроллера. В качестве запоминающего устройства 13 может использоваться оперативное запоминающее устройство (ОЗУ) контроллера. Примеры реализации контроллеров приведены [4], [5], [6].
хранится в виде программы в ПЗУ контроллера. В качестве запоминающего устройства 13 может использоваться оперативное запоминающее устройство (ОЗУ) контроллера. Примеры реализации контроллеров приведены [4], [5], [6].
Усредняемое значение прямого измеряемого перемещения определяется контроллером следующим образом
где f - частота следования счетных импульсов.
При этом, согласно [3],
где  среднеквадратичное отклонение Xср;
среднеквадратичное отклонение Xср; - среднеквадратичное отклонение Xi.
- среднеквадратичное отклонение Xi.
Таким образом, незначительное (на величину длительности пачки из n импульсов) увеличение времени преобразования приводит к увеличению в  раз точности преобразователя, что позволяет применить его в системах, предъявляющих высокие требования как к динамическим параметрам преобразователей, так и к точности измерений.
раз точности преобразователя, что позволяет применить его в системах, предъявляющих высокие требования как к динамическим параметрам преобразователей, так и к точности измерений.
Источники информации
1. А.с. СССР N 385305, кл. G 08 9/04, 1971 г.
2. Патент RU N 2047179, кл. G 01 B 7/00, 1995 г.
3. НОВИЦКИЙ П.В., ЗООГРАФ И.А. Оценка погрешностей результатов измерений. - Л.: Энергоатомиздат, 1991. - 304 с.
4. СТАШИН В. В., УРУСОВ А.В., МОЛОГОНЦЕВА О.Ф. Проектирование цифровых устройств на однокристальных микроконтроллерах. -М.:Энергоатомиздат, 1990.
5. БАЛАШОВ Е.П., ПУЗАНКОВ Д.В. Микропроцессоры и микропроцессорные системы. -М.: Радио и связь, 1981.
6. ДРОЗДОВ Н.В., МИРОШНИК И.В., СКОРУБСКИЙ И.В. Системы автоматического управления с микроЭВМ. -Л.: Машиностроение, Ленинградское отделение, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2104482C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1992 |
|
RU2080559C1 |
| МОДУЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1992 |
|
RU2097916C1 |
| Преобразователь перемещения в код | 1990 |
|
SU1783608A1 |
| МИКРОПРОЦЕССОРНЫЙ МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОЛОЖЕНИЯ В КОД | 1999 |
|
RU2175754C2 |
| АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2099864C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2109399C1 |
| Магнитострикционный дифференциальный преобразователь перемещений | 1978 |
|
SU747812A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2090839C1 |
| Магнитострикционный преобразователь линейных перемещений | 1980 |
|
SU871347A1 |
Изобретение относится к измерительной технике. Технический результат - увеличение точности преобразователя перемещений в код без ухудшения динамических свойств. В преобразователь перемещений в код, содержащий звукопровод, на котором установлены демпферы, формирователь импульсов, соединенный с катушкой записи, катушку считывания, соединенную с усилителем, введены генератор пачки импульсов, генератор счетных импульсов, счетчик, регистр, устройство управления, запоминающее устройство и сумматор. 1 ил.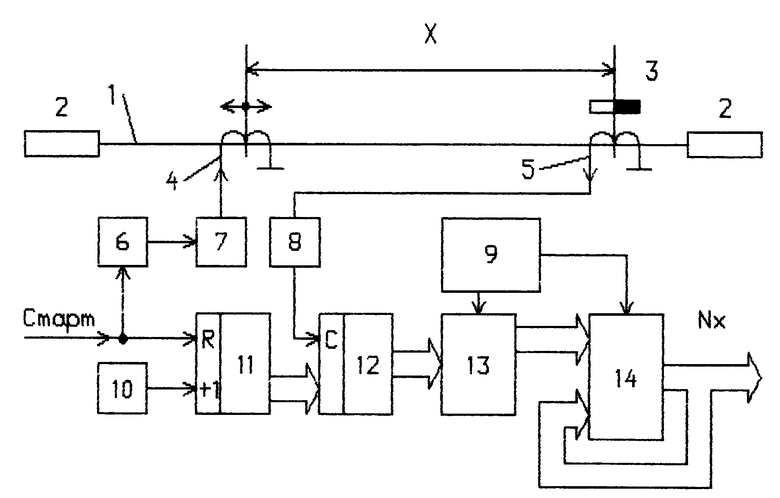
Магнитострикционный преобразователь перемещений, содержащий звукопровод, на концах которого установлены демпферы, катушку записи, жестко связанную с объектом позиционирования и соединенную с выходом формирователя импульсов записи, катушку считывания, соединенную с входом усилителя импульсов считывания, генератор счетных импульсов, соединенный выходом со счетным входом счетчика, отличающийся тем, что счетчик входом установки в нулевое состояние соединен с линией "Старт", а выходом - с информационным каналом регистра, который тактовым входом соединен с усилителем импульсов считывания, в него введены генератор пачки импульсов, входом соединенный с линией "Старт", а выходом - с входом формирователя импульсов, устройство управления, запоминающее устройство, входом управления соединенное с первым выходом устройства управления, информационным каналом - с выходом регистра, а выходом - с первым информационным каналом сумматора, вход управления которого соединен со вторым выходом управляющего устройства и имеющего обратную связь по второму информационному каналу с собственным выходом, при этом под воздействием устройства управления в сумматоре вычисляется среднее значение кода пропорционального времени распространения ультразвуковой волны от катушки записи до катушки считывания.
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПАРАМЕТРОВ ДВИЖЕНИЯ | 1992 |
|
RU2047179C1 |
| RU 94021322 A1, 10.11.95 | |||
| Магнитострикционный преобразователь перемещений | 1982 |
|
SU1065678A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПАРАМЕТРОВ ДВИЖЕНИЯ | 1992 |
|
RU2047179C1 |
| БИОЛОГИЧЕСКИЙ РЕАКТОР | 1992 |
|
RU2015163C1 |
| РАСТОПОЧНОЕ СРЕДСТВО | 1998 |
|
RU2132362C1 |
