Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах измерения и контроля положения и перемещения подвижных объектов систем управления.
Известен магнитострикционный преобразователь линейных перемещений [1], содержащий звукопровод, подвижные передающую и приемную катушки, демпфер, постоянные магниты, формирователь импульсов записи, усилитель считывания, формирователь импульсов, триггер со счетным входом, одновибратор и измеритель отношения временных интервалов. Однако наличие подвижных катушек затрудняет реализацию преобразователя для больших диапазонов перемещения и снижает его надежность.
Наиболее близким к изобретению по технической сущности является магнитострикционный преобразователь перемещения в код [2], включающий магнитострикционную линию с демпферами на концах, электроакустический преобразователь, элемент возбуждения опорного ультразвукового импульса, содержащий неподвижные постоянные магниты, элемент возбуждения ультразвукового импульса, содержащий постоянные магниты, жестко связанные с объектом контроля, усилитель-формирователь считывания, формирователь импульсов тока возбуждения, генератор счетных импульсов, счетчик, регистры памяти, буферный формирователь, дешифратор адреса, формирователь запуска, формирователь сигнала готовности, счетчик режима, а положение объекта контроля определяется согласно дифференциально-логометрического алгоритма преобразования. Но для реализации данного алгоритма необходимо наличие двух каналов формирования кодов NX и N0.
Целью изобретения является повышение быстродействия в определенных режимах работы и упрощение конструкции магнитострикционного преобразователя положения.
Это достигается тем, что в устройстве, содержащем магнитострикционный волновод, постоянный магнит, жестко связанный с объектом измерения, формирователь возбуждения, электроакустический преобразователь считывания, усилитель-формирователь считывания, генератор образцовой частоты, счетчик, причем концы волновода соединены соответственно с общей шиной и выходом формирователя возбуждения, электроакустический преобразователь считывания, установленный на волноводе, соединен с входом усилителя-формирователя считывания, с целью упрощения конструкции один конец волновода закреплен при помощи демпфера, а другой в отражающей стойке, при этом в качестве стартового импульса используется импульс электромагнитной наводки в электроакустическом преобразователе от импульса тока возбуждения, в качестве информационных импульсов - прямой и отраженный ультразвуковые импульсы, а двухканальная схема формирования числового кода измеряемого интервала заменена одноканальной, при этом в схему введены шинный формирователь, дешифратор команд, микропроцессор, причем первый вход схемы формирования измеряемого интервала соединен с выходом усилителя-формирователя считывания, второй вход соединен с выходом генератора образцовой частоты, управляющий вход схемы соединен со вторым выходом дешифратора команд, выход схемы соединен с счетным входом счетчика, выход которого соединен с входом шинного формирователя, с его выходом соединен входной порт микропроцессора, выходной порт которого соединен с входом дешифратора команд, первый выход которого соединен с входом формирователя возбуждения, третий выход соединен с входом сброса счетчика, четвертый выход соединен с входом управления шинного формирователя, при этом измеряемый интервал и алгоритм преобразования выбирается микропроцессором в зависимости от требуемых метрологических параметров посредством дешифратора команд и схемы формирования измеряемого интервала.
Блок схема устройства представлена на фиг. 1.
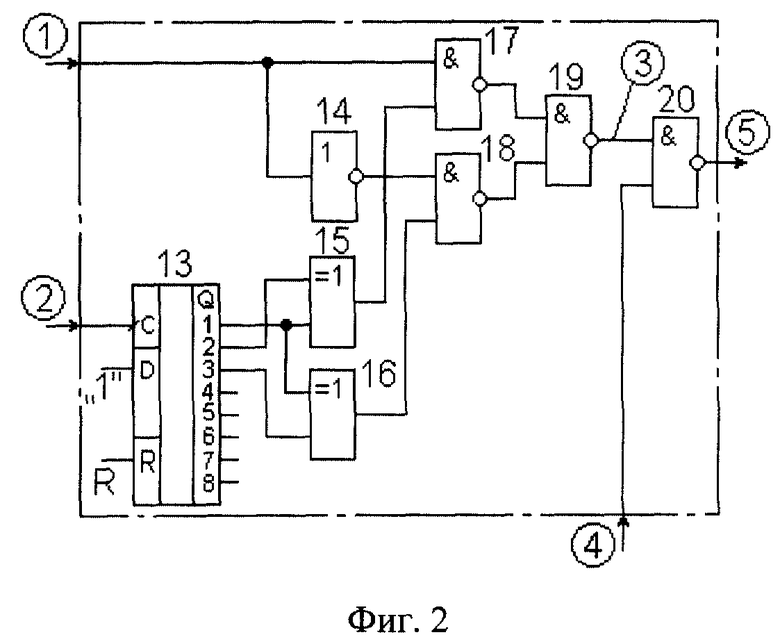
Устройство выполнено на основе магнитострикционного волновода 1. Один конец волновода закреплен в демпфере 2, необходимом для предотвращения отражения волны от данного конца волновода, второй конец волновода закреплен в отражающей стойке. Постоянный магнит 3 жестко связан с объектом контроля. Для преобразования упругой механической волны в импульс ЭДС используется электроакустический преобразователь 4, выход которого соединен с входом усилителя-формирователя 5. Выход усилителя формирователя 5 соединен с одним из входов схемы формирования измеряемого интервала 7. Данная схема в зависимости от сигнала на выходе 2 дешифратора команд 11 формирует временной интервал, заполненный импульсами, поступающими с образцового генератора 8. Один из возможных вариантов реализации схемы формирования, представлен на фиг. 2. В состав схемы входит сдвигающий регистр 13 с последовательным входом и параллельным выходом, логические элементы НЕ 14, ИСКЛЮЧАЮЩЕЕ ИЛИ 15-16 и И-НЕ 17-20. Вход 1 схемы формирования измеряемого интервала соединен с выходом 2 дешифратора команд 11, вход 2 схемы соединен с выходом усилителя формирователя 5, вход 4 схемы соединен с выходом образцового генератора 8. Выход 5 схемы формирования соединен с входом счетчика 9. Шинный формирователь 10 осуществляет передачу кода в порт микропроцессора 12. Управление схемой формирования измеряемого интервала, счетчиком и шинным формирователем осуществляется дешифратором команд 11 по сигналам микропроцессора. Выход 1 дешифратора команд соединен с входом формирователя возбуждения 6. Формирователь 6 формирует импульс тока заданной амплитуды и длительности, поступающий в волновод.
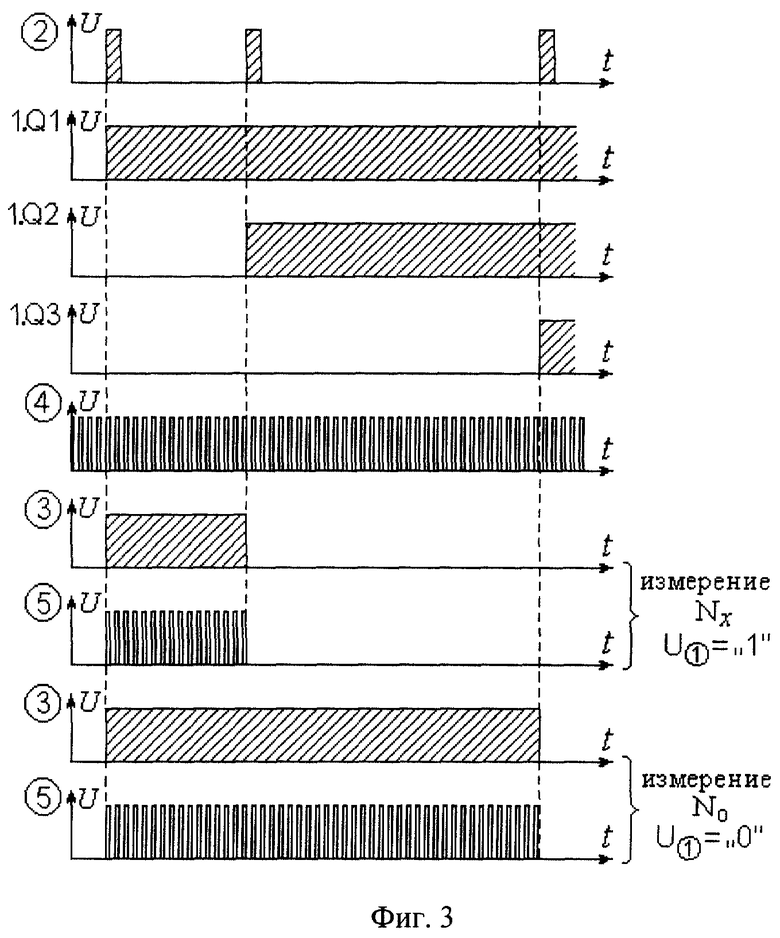
Устройство работает следующим образом. Запуск устройства осуществляется сигналом с выхода 1 дешифратора 11 по команде микропроцессора 12. Сигнал, усиленный и сформированный формирователем 6, поступает в волновод. При прохождении радиального магнитного поля под постоянным магнитом 3 вследствие магнитострикционного эффекта в волноводе 1 возбуждается ультразвуковая крутильная волна, распространяющаяся в обе стороны. Волна, дошедшая до отражающей стойки, отражается и распространяется в сторону электроакустического преобразователя 4. В нем формируется три импульса ЭДС. Первый - вызван электромагнитной наводкой от прохождения по волноводу импульса тока возбуждения, второй - прямой ультразвуковой волной, возникшей под постоянным магнитом, третий - отраженной ультразвуковой волной. Импульсы ЭДС поступают на усилитель-формирователь считывания 5, после усиления и формирования сигнал поступает на схему формирования интервала измерения 7. По фронту каждого импульса, поступающего на вход 2 схемы, в регистр сдвига 13 записывается логическая единица, сигналы на выходах регистра изменяются так, как показано на фиг. 3. В зависимости от сигнала на выходе 2 дешифратора команд 11 (вход 1 схемы формирования) изменяется число импульсов образцового генератора 8, поступающих на счетчик 9. На фиг. 3 показаны импульсы, поступающие в счетчик с выхода 5 схемы формирования в зависимости от сигнала на входе 1 схемы (сигнал от дешифратора команд).
Цифровой код NX на выходе счетчика 9 соответствует времени пробега прямой ультразвуковой волной, возникшей под постоянным магнитом, и определяется положением контролируемого объекта
где fгоч - частота импульсов генератора образцовой частоты 8;
V - скорость распространения ультразвуковой волны.
N0 - цифровой код, соответствующий времени пробега отраженной ультразвуковой волны, определяется по формуле .
.
После окончания счета шинный формирователь 10 по сигналам на выходе 4 дешифратора 11 передает код с выхода счетчика 9 в порт микропроцессора 12.
Обработка кодов и управление работой устройства осуществляется микропроцессором, режим работы и алгоритм обработки выбираются оператором в зависимости от требуемой точности и скорости получения информации о положении объекта.
При необходимости получения оперативной информации о положении контролируемого объекта и невысоком требовании к точности осуществляется только определение кода NX, при этом положение вычисляется как
X=K•NX, (3)
где K - масштабный коэффициент.
При необходимости получения высокой точности поочередно, в двух циклах измерения, определяются NX и N0. Положение объекта определяется микропроцессором по выражению .
.
Применение данного алгоритма обеспечивает высокую повторяемость статической характеристики устройства при изменении температуры окружающей среды и при естественном старении звукопровода.
Применение двух алгоритмов для обработки измерительной информации позволяет при необходимости сократить время цикла измерения, уменьшая точность результата, или повысить, при необходимости, точность результата измерения за счет применения логометрического алгоритма обработки.
Источники информации
1. А.с. N 537242 СССР; МКИ G 01 D 5/12. Магнитострикционный преобразователь линейных перемещений / Э.А. Артемьев, А.И. Надеев - N 2181343. Заявл. 09.10.75; опубл. 30.11.76. Бюл. N 44.
2. Патент РФ N 2080559; МКИ G 01 D 5/12. Магнитострикционный преобразователь перемещения в код / А. И. Надеев, О.И. Шумов - N 5055877/28. Заявл. 22.07.92; опубл. 27.05.97. Бюл. N 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ В КОД | 1996 |
|
RU2145059C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ СКОРОСТИ ПЕРЕМЕЩЕНИЙ В КОД | 1996 |
|
RU2138118C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1992 |
|
RU2080559C1 |
| АКУСТОИМПЕДАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКИХ СРЕД | 2002 |
|
RU2221993C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2117914C1 |
| Устройство для преобразования перемещения в код | 1988 |
|
SU1541480A1 |
| Магнитострикционный дифференциальный преобразователь перемещений | 1978 |
|
SU747812A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2008 |
|
RU2374608C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2189111C2 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2109399C1 |
Устройство относится к области автоматики и может быть использовано в системах измерения и контроля положения и перемещения подвижных объектов систем управления. Преобразователь выполнен на основе магнитострикционного волновода. Один конец волновода закреплен при помощи демпфера, а другой - в отражающей стойке. В качестве стартового импульса используется импульс электромагнитной наводки в электроакустическом преобразователе от импульса тока возбуждения. В качестве информационных импульсов используются прямой и отраженный импульсы. Одноканальная схема формирования измеряемого интервала формирует временной интервал, заполненный импульсами с образцового генератора. Импульсы образцового генератора подсчитываются счетчиком. Режим работы и алгоритм преобразования задается микропроцессором. Преобразователь может работать в режимах, обеспечивающих высокую повторяемость статической характеристики устройства при изменении температуры окружающей среды и естественном старении волновода или повышенное быстродействие в отсутствие необходимости в высокой точности преобразования. 3 ил.
Микропроцессорный магнитострикционный преобразователь положения в код, содержащий магнитострикционный волновод, постоянный магнит, жестко связанный с объектом измерения, формирователь возбуждения, электроакустический преобразователь считывания, усилитель-формирователь считывания, генератор образцовой частоты, счетчик, причем концы волновода соединены соответственно с общей шиной и выходом формирователя возбуждения, электроакустический преобразователь считывания, установленный на волноводе, соединен с входом усилителя-формирователя считывания, отличающийся тем, что один конец волновода закреплен при помощи демпфера, а другой - в отражающей стойке, при этом в качестве стартового импульса используется импульс электромагнитной наводки в электроакустическом преобразователе от импульса тока возбуждения, в качестве информационных импульсов - прямой и отраженный ультразвуковые импульсы, в электронную схему введены одноканальная схема формирования измеряемого интервала, шинный формирователь, дешифратор команд, микропроцессор, причем первый вход схемы формирования измеряемого интервала соединен с выходом усилителя-формирователя считывания, второй вход соединен с выходом генератора образцовой частоты, управляющий вход схемы соединен со вторым выходом дешифратора команд, выход схемы соединен со счетным входом счетчика, выход которого соединен с входом шинного формирователя, с его выходом соединен входной порт микропроцессора, выходной порт которого соединен с входом дешифратора команд, первый выход которого соединен с входом формирователя возбуждения, третий выход соединен с входом сброса счетчика, четвертый выход соединен с входом управления шинного формирователя, при этом измеряемый интервал и алгоритм преобразования выбирается микропроцессором в зависимости от требуемых метрологических параметров посредством дешифратора команд и схемы формирования измеряемого интервала.
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД | 1992 |
|
RU2080559C1 |
| Устройство для преобразования перемещения в код | 1988 |
|
SU1541480A1 |
| Пролетное строение крана мостового типа | 1977 |
|
SU656954A1 |
| DE 3441894 A1, 24.07.1986 | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| DE 3131455 A1, 24.03.1983 | |||
| Ультразвуковой измеритель скорости уз колебаний и толщины изделий с цифровой индикацией | 1972 |
|
SU494953A1 |
| Цифровой измеритель скорости ультразвука | 1984 |
|
SU1180709A1 |
| Магнитострикционный преобразователь линейных перемещений | 1975 |
|
SU537242A1 |
| Устройство для измерения перемещения | 1987 |
|
SU1476309A1 |

