Область техники, к которой относится изобретение
Изобретение относится к системе PCS (персональные услуги связи), а более конкретно, к способу и устройству для организации сообщения о состоянии/сигнализации и передачи системного времени приемнику глобальной спутниковой системы местоопределения (GPSR).
Уровень техники
На фиг. 1 представлена система персональных услуг (далее обозначенная как PCS), включающая совокупность GCIN (сеть согласования связи межсетевых интерфейсов), где между различными MSC (подвижной коммутационный центр) формируется совокупность каналов связи. Однако, как показано на фиг. 1, так как система PCS не имеет каналов связи, сформированных непосредственно между GCIN, то может оказаться невозможным обеспечить межпроцессорную связь (IPC) между GCIN. Таким образом, для передачи управления между GCIN, в системе PCS используется фиксированный канал передачи управления между MSC. Соответственно, неизбежно возникает необходимость создавать задержку вызова, примерно равную 100 миллисекундам. Как видно из фиг. 1, CIN (сеть согласования связи), включающая GCIN и LCIN (сеть согласования локальной связи) представляет канал передачи пакетных данных между BTS (приемно-передающая система базовой станции) и BSC (контроллером базовой станции). Таким образом, данные и сигналы могут передаваться посредством CIN.
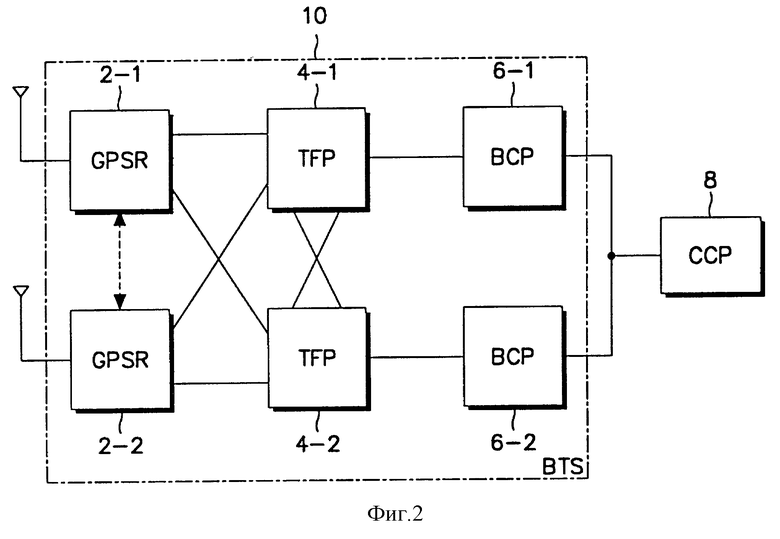
На фиг. 2 показана диаграмма блоков устройства для передачи данных сообщения TOD (времени дня) от приемника глобальной спутниковой системы местоопределения (далее упоминаемой как GPSR) в соответствии с ранее известным в технике. Как показано, в известной системе CDMA (многостанционного доступа с кодовым разделением), TFP (процессор времени и частоты) 4-1 и 4-2 посредством TFCA (сборка контроллера времени и частот) принимает данные сообщения TOD от GPSR 2-1 и 2-2.
Вообще, данные сообщения TOD, принимаемые от GPSR 2-1 и 2-2, состоят из 16 байтов. Другими словами, данные сообщения TOD включают 11-байтовую информацию, представляющую системное время, 1-байтовую информацию, представляющую состояние GPSR, 1-байтовую информацию, представляющую сигнализацию от GPSR, 2-байтовую информацию, представляющую дополнительную секунду, а также 1-байтовую информацию, представляющую конец сообщения. Системное время включает информацию о годе, месяце, дне, часе, минуте и секунде в системе. TFP 4-1 и 4-2 управляет и сообщает о состоянии и сигнализации GPSR 2-1 и 2-2 на основании принятых данных сообщения TOD и подсчитывает системное время в секундах для передачи рассчитанного системного времени соответствующим процессорам в приемо-передающей подсистеме базовой станции (BTS) 10 через HINA (сборка на плате узла IPC с высокой емкостью). Далее, BTS 10 включает GPSR 2-1 и 2-2, TFP 4-1 и 4-2, а также BCP (процессор управления BTS) 6-1 и 6-2. Принадлежащий BSC CCP (процессор управления вызовом) 8, связан с BTS 10 для контроля вызова.
В системе PCS (показанной пунктирной линией для синхронизации GPSR 2-1 и 2-2), которая сильно отличается от известной системы CDMA, имеется сильно измененное программное обеспечение для обработки данных сообщения TOD. TFP 4-1 и 4-2 на плате TFCA принимают одиночный тактовый сигнал IPPS (импульс в секунду) частотой 10 мГц для генерации тактовой частоты системы. Тактовая частота системы подается на соответствующие платы. Далее, TFPS 4-1 и 4-2 обрабатывают данные сообщения TOD.
Однако ранее известное устройство для обработки данных сообщения TOD не может детально сообщать информацию о состоянии и сигнализации GPSR. Более того, это известное устройство сложно и требует много времени управление состоянием и сигнализацией GPSR. Кроме этого, системное время должно рассчитываться на основании данных сообщения TOD. Более того, так как TFP 4-1 и 4-2 на плате TFCA управляют состоянием и сигнализацией GPSR, то соответствующие сигналы тактовой частоты и состояние/сигнализация самой платы TFCA должны управляться совместно, что приводит к усложнению этого процесса. Более того, так как программное обеспечение платы TFCA участвует в генерации и управлении сигналами тактовой частоты для использования в системе, то сложно эффективно управлять и контролировать сигналы тактовой частоты. Это происходит по той причине, что синхронизация (во время ее инициализации) управляется программным обеспечением платы TFCA, хотя генерация и распределение сигналов тактовой частоты обрабатывается аппаратным обеспечением платы TFCA.
Сущность изобретения
Поэтому целью настоящего изобретения являются разработка способа и устройства организации детального сообщения состояния/сигнализации GPSR и передачи точного системного времени.
Другой целью настоящего изобретения является разработка способа и устройства для упрощения обслуживания базовой станции в GPSR.
В соответствии с объектами настоящего изобретения, состояние и сигнализация GPSR детально представляются в данных сообщения TOD. Таким образом могут быть организованы детальные сообщения о состоянии и сигнализации GPSR, и системное время легко может быть выделено из данных сообщения TOD. Далее, упрощается процесс сложного расчета, что приводит к уменьшению времени обработки и исключению неправильной работы. Далее, BCP организует данные сообщения TOD для GPSR без использования плат TFCA так, что можно исключить этап промежуточной обработки. Соответственно, облегчается обслуживание системы и минимизируется влияние неисправности на работу системы, возникшей во время переключения GPSR.
Краткое описание чертежей
Указанные выше цели, свойства и преимущества настоящего изобретения станут более очевидными в свете представленного ниже детального описания примера исполнения изобретения, описанного совместно с прилагаемыми чертежами, на которых:
фиг. 1 является диаграммой, иллюстрирующей каналы связи, сформированные между MSC в общей PCS системе, содержащей совокупность GCIN;
фиг. 2 является диаграммой блоков устройства для передачи данных сообщения TOD (времени дня), передаваемых от приемника глобальной спутниковой системы местоопределения (GPSR) в соответствии с уровнем техники;
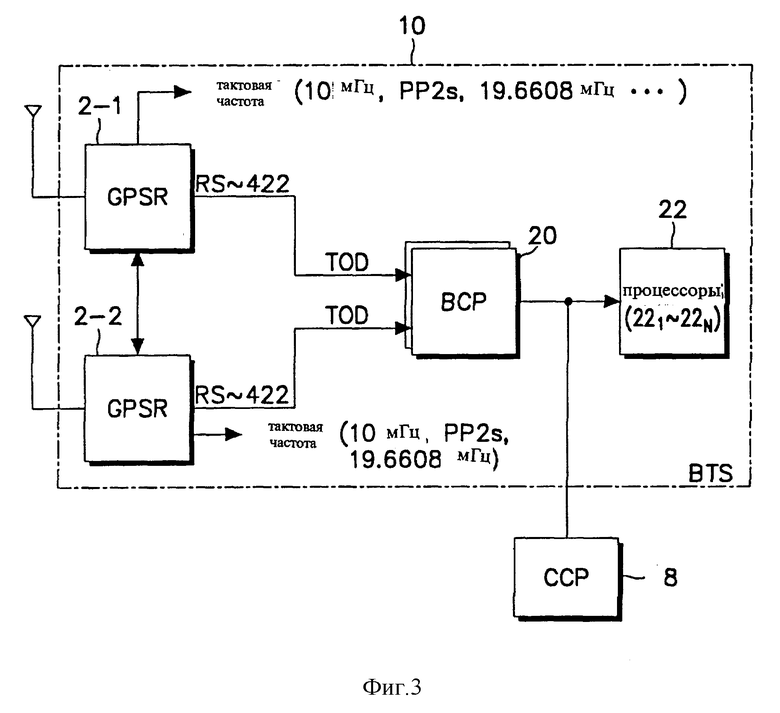
фиг. 3 является диаграммой для пояснения, что процессор управления BTS (BCP) принимает данные сообщения TOD от GPSR для передачи системного времени в соответствии с воплощением настоящего изобретения;
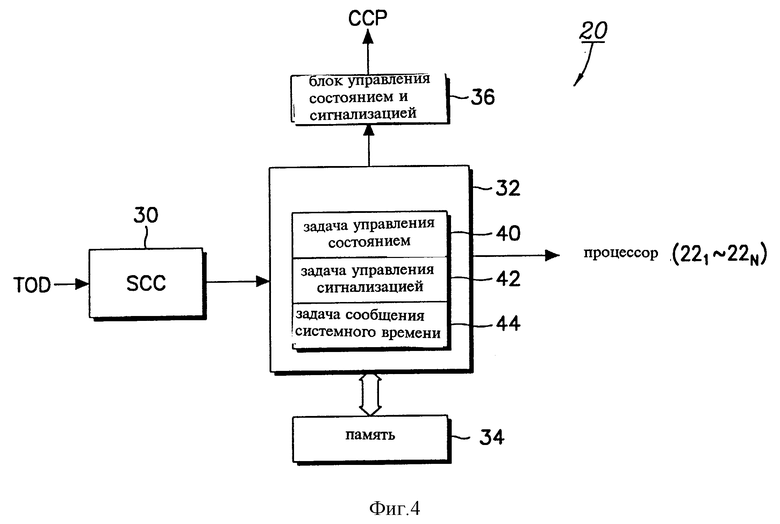
фиг. 4. является детальной диаграммой блоков BCP, показанного на фиг. 3;
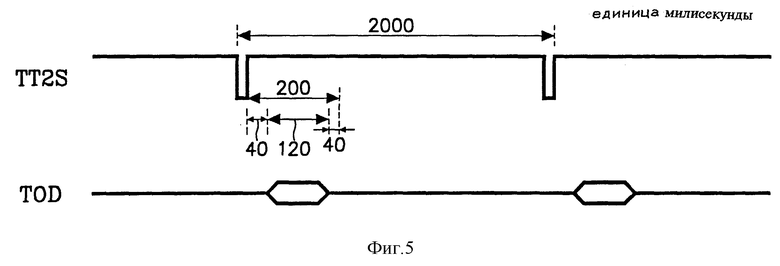
фиг. 5 является диаграммой тактирования данных сообщения TOD, передаваемых от GPSR на BCP;
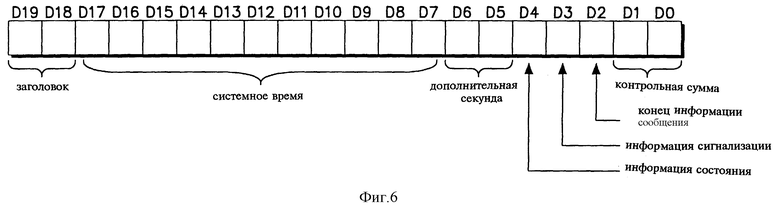
фиг. 6 является диаграммой, показывающей формат данных сообщения TOD в соответствии с воплощением настоящего изобретения;
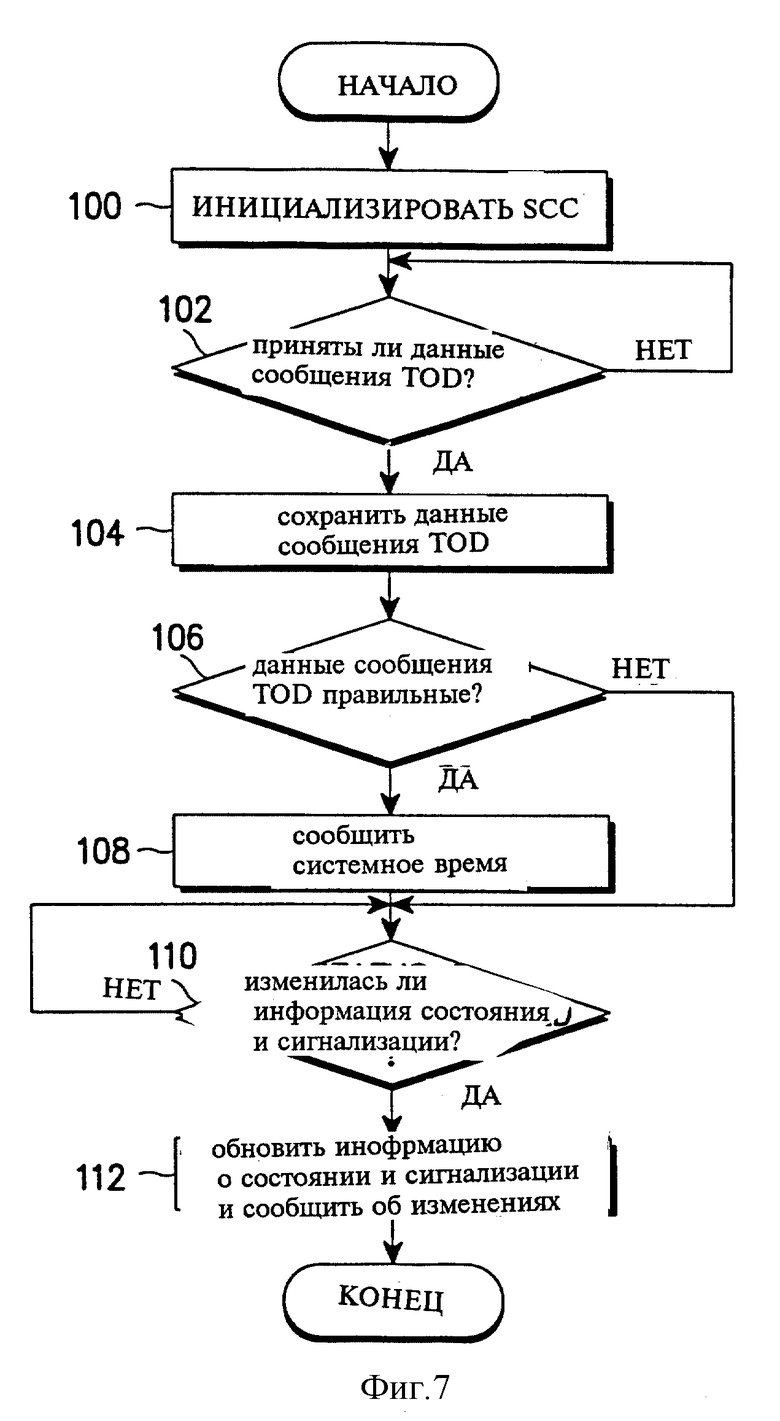
фиг. 7 является диаграммой, показывающей процесс организации сообщения состояния/сигнализации GPSR и передачи системного времени в соответствии с воплощением настоящего изобретения.
Детальное описание предпочтительного исполнения
Далее предпочтительное воплощение настоящего изобретения будет описано детально со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы. Далее, необходимо понимать, что многие специфические детали такие, как конкретные элементы схемы, показаны только в качестве примера для лучшего понимания настоящего изобретения и настоящее изобретение может быть выполнено и без этих деталей. Более того, необходимо учитывать, что детальное описание связанной области техники может быть умышленно опущено, если имеется уверенность в отсутствии такой необходимости при описании концепций настоящего изобретения.
На фиг. 3 показана диаграмма для пояснения, что процессор управления BTS (BCP) 20 принимает данные сообщения TOD от GPSR 2-1 и 2-2 для передачи системного времени в соответствии с воплощением настоящего изобретения. Как показано, GPSR 2-1 и 2-2 принимают информацию о текущем времени и информацию о расположении со спутника GPS (глобальная спутниковая система местоопределения) и генерируют различные типы сигналов тактовых частот (10 мГц, PP2S (импульс в 2 секунды), 19.6608 мГц и т.д.) для каждого из блоков приемо/передающей системы базовой станции (BTS) 10. Далее, GPSR 2-1 и 2-2 передают данные сообщения TOD, показанные на фиг. 6, дуальному процессору управления BTS (BCP) 20 по его RS-422 интерфейсам.
Как показано на фиг. 6, данные сообщения TOD D19-D0 состоят из 2-байтового заголовка D19-D18 и 11-байтовой информации о системном времени, D17-D7 2-байтовой информации о дополнительной секунде D6-D5, однобайтовой информации о состоянии D4, однобайтовой информации о сигнализации D3, однобайтовой информации о конце сообщения D2 и 2-байтовой контрольной суммы D1-D0. 2-байтовый заголовок D19-D18 указывает, что текущее сообщение является TOD сообщением. 11-байтовая системная информация D17-D7 содержит информацию о системном времени в секундах. Байт D2 указывает конец сообщения.
Информация о состоянии D4 состоит из 8 битов B7-B0 (т.е. из 1 байта = 8 битам), в которой бит B7 представляет ответную реакцию, бит B6 указывает, представлено ли системное время в данных сообщения TOD в секундах или нет, а бит B5 указывает, находятся ли GPSR 2-1 и 2-2 в рабочем состоянии или нет. Далее, бит B4 указывает, превышает ли системное время, принятое со спутника GPS 24 часа, а бит B3 указывает, находятся ли GPSR 2-1 и 2-2 в рабочем состоянии или нет. Далее, биты B2 и B1 указывают дополнительные секунды, а бит B0 указывает, синхронизированы ли GPSR 2-1 и 2-2 друг с другом или нет. Аналогично, информация о сигнализации D3 состоит из 8 битов B7-B0, где бит B7 указывает, стабильна ли тактовая частота или нет, а бит B6 устанавливается во время переключения GPSR 2-1 и 2-2 из рабочего состояния в состояние ожидания или из состояния ожидания в рабочее состояние. Бит B5 указывает, превышает ли принятое от спутника GPS системное время 24 часа или нет. Бит B4 используется для частотного контроля, а бит B3 указывает, находится ли антенна в рабочем состоянии или нет. Далее, бит B1 указывает, находится ли GPSR 2-1 и 2-2 в рабочем состоянии или нет, а бит B0 указывает положение GPSR 2-1 и 2-2. Данные сообщения TOD, показанные на фиг. 6, передаются на GPSR 2-1 и 2-2 каждые 2 секунды, в соответствии с диаграммой синхронизации, показанной на фиг. 5.
BCP 20, плата основного процессора BTS 10, которая является базовой станцией системы подвижной связи PCS, принимает данные сообщения TOD, показанные на фиг. 6 от GPSR 2-1 и 2-2 для выполнения управления состоянием, управления синхронизацией, функциями отчета, а также функциями контроля. BCP 20 содержит совокупность отдельных блоков программного обеспечения, каждый из которых одновременно работает в среде RMOS (операционная система адресной групповой передачи в реальном времени) для выполнения своей единственной функции.
На фиг. 4 показана детальная блок-схема BCP 20, показанного на фиг. 3, где BCP 20 имеет контроллер последовательной связи (SCC) 30, который является блоком аппаратного обеспечения, блок управления и передачи сообщений 32, который является блоком программного обеспечения, реализованным в ЦП (блок центрального процессора, не показан), память 34 и блок управления состоянием и сигнализацией 36. Блок управления и передачи сообщений 32 включает задачу управления состоянием 40, задачу управления сигнализацией 42 и задачу передачи системного времени 44, для управления и передачи сообщений о состоянии и сигнализации на основании данных сообщения TOD, принимаемых от GPSR 2-1 и 2-2 и для передачи системного времени. Сообщения о сигнализации и о состоянии, получаемые от блока управления и контроля передачи сообщений 32 передаются на CCP 8, принадлежащей контроллеру базовой станции BSC, через блок управления сигнализацией и состоянием 36. Данные сообщения о системном времени, передаваемые от блока управления и контроля передачи сообщений 32, передаются на все процессоры 221-22N в BTS 10. Таким образом, процессоры 221-22N могут принимать данные сообщения системного времени в любое время.
Со ссылкой на фиг. 4 и 7 детально описана работа BCP 20 во время передачи данных сообщения TOD от GPSR 2-1 и 2-2.
Во время включения в работу блока управления и контроля передачи сообщений 32 в BCP 20 на шаге 100 инициализируется контроллер последовательной связи 30. Затем блок управления и контроля передачи сообщений 32 в BCP 20 принимает данные сообщения TOD, передаваемые от GPSR 2-1 и 2-2 в течение каждых 2 секунд посредством SSC 30. На шаге 102 блок управления и контроля передачи сообщений 32 проверяет, были ли приняты данные сообщения TOD. Если данные сообщения TOD были приняты, то блок управления и контроля передачи сообщений 32 сохранит данные сообщения TOD в памяти 34. На шаге 106 блок управления и контроля передачи сообщений 32 проверяет, являются ли принятые данные правильными данными сообщения TOD, посредством обращения к 2-байтовой заголовочной информации D19 и D18 данных сообщения TOD. Если были приняты правильные данные сообщения TOD, то блок управления и контроля передачи сообщений 32 на шаге 108 выделяет системное время из данных сообщения TOD и передает системное время соответствующим процессорам 221-22N в BTS 10 посредством HINA (сборка на плате узла IPC с высокой емкостью).
Блоки задачи управления состоянием 40 и задачи управления сигнализацией 42 периодично работают для поддержки RMOS (операционная система адресной групповой передачи в реальном времени). В соответствии с периодичностью работы блоков задачи управления состоянием 40 и задачи управления сигнализацией 42 блок управления и контроля передачи сообщений 32 на шаге 110 проверяет, была ли изменена информация о состоянии и сигнализации, принятая в данных сообщения TOD. Если эта информация была изменена, то блок управления и контроля передачи сообщений 32 обновит информацию о состоянии и сигнализации в GPSR 2-1 и 2-2 и сообщит об изменениях процессору управления вызовом (CCP) 8 через блок управления состоянием и сигнализацией 36 на шаге 112.
При рассмотрении дальнейшего описания необходимо иметь в виду, что блок управления и контроля передачи сообщений 32 немедленно передает системное время в ответ на прерывания GPSR. Однако периодически осуществляется управление сигнализацией и состоянием.
Как описано далее, BTS настоящего изобретения обеспечивает стабильными сигналами тактовой частоты и точным системным временем надлежащую работу системы базовой станции. Далее, о состоянии и о сигнализации GPSR может быть сообщено точно и детально так, чтобы легко могло бы осуществляться обслуживание базовой станции. Более того, для BTS настоящего изобретения не нужна плата TFP, что привело к усовершенствованию характеристик системы и понижению стоимости. Кроме этого, неисправность системы может быть устранена во время работы системы и устранение возникшей неисправности занимает весьма небольшой промежуток времени.
Хотя выше предпочтительное воплощение настоящего изобретения было описано детально, но необходимо ясно представлять себе, что многие изменения и/или модификации описанных основных концепций изобретения, которые могут осуществить знакомые с данной областью техники, все равно будут соответствовать духу и содержанию настоящего изобретения в соответствии с тем, что описано в прилагаемой формуле изобретения.
Устройство для организации детального сообщения о состоянии/сигнализации приемника глобальной спутниковой системы местоопределения (GPS) и для передачи точного системного времени. Приемник GPS принимает информацию о текущем времени и о состоянии от спутника глобальной спутниковой системы с местоопределения для генерации сигналов тактовой частоты для соответствующих блоков базовой станции и для генерации данных сообщений об организации собственного состояния/сигнализации и данных сообщения системного времени. Процессор управления базовой станции принимает данные сообщения об организации состояния/сигнализации и данные сообщения системного времени, выделяет информацию о системном времени из этих данных для немедленной передачи этой информации о системном времени на соответствующие процессоры базовой станции и периодически проверяет изменения сообщения о состоянии и сигнализации в данных сообщениях системного времени для сообщения об изменении состояния и сигнализации устройству управления базовой станции, что и является достигаемым техническим результатом. 2 с. и 3 з.п. ф-лы, 7 ил.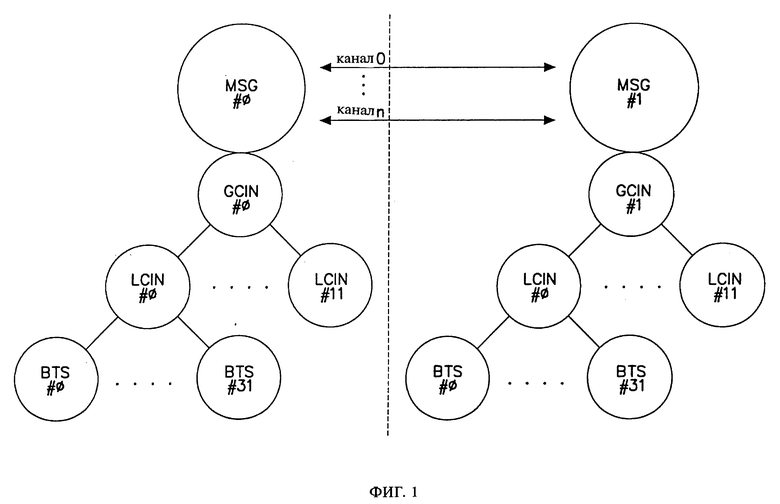
| Способ получения казеинового и других белковых волокон | 1941 |
|
SU73943A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Устройство для измерения профиля детали | 1974 |
|
SU551126A1 |
| Способ радиосвязи с подвижными объектами в системе связи сотовой структуры | 1989 |
|
SU1626412A1 |
