Область техники, к которой относится изобретение
Изобретение относится к вторичной обзорной радиолокационной станции и, в частности к радиолокационной станции с режимом работы "S", предназначенной для определения местоположения и опознавания летательных аппаратов.
Описание уровня техники
В первичной радиолокационной системе радиолокационные сигналы, передаваемые антенной, отражаются удаленной целью, такой как летательный аппарат, формируя ответный сигнал. Соединенный с антенной приемник обрабатывает ответные сигналы и определяет дальность до цели и ее азимут. Во вторичной радиолокационной станции опознавание таких целей, как самолеты осуществляется с использованием радиолокационных ответчиков, установленных на каждом летательном аппарате и опрашиваемых передаваемыми радиолокационными сигналами. Так, например, вторичная радиолокационная станция (ВРЛС) обычно используется для отображения местоположения и опознавания всего летательного аппарата, находящегося на расстоянии прямой видимости от летного поля, обычно в радиусе 100 морских миль (185,2 км). Наземная радиолокационная станция, именуемая запросчиком, передает сигналы опроса на радиочастоте 1030 МГц, которые запрашивают ответчики, передающие, в свою очередь, ответный сигнал запросчику на частоте 1090 МГц.
Запросчик передает радиосигналы при помощи антенны с вращающейся диаграммой направленности, которая обычно является антенной с механическим вращением, но может также содержать и неподвижную фазированную антенную решетку с электронным управлением лучом, которая обеспечивает сканирование в широком секторе по углу места и узком азимутальном секторе. Азимут направления на летательный аппарат вычисляется исходя из данных о положении диаграммы направленности антенны запросчика в момент приема им ответа от самолета. Кроме того, расстояние до летательного аппарата определяется на основе анализа интервала времени между передачей запроса и получением ответного сигнала, соответствующего этому запросу. Таким образом определяются дальность до летательного аппарата и направление на него. Более подробно особенности функционирования ВРЛС изложены в работе "Radar systems" (Радиолокационные системы), Paul A.Lynn, Macmillan 1987, Chapter 6, рp. 109-119.
Ответный сигнал, формируемый самолетным ответчиком обычной ВРЛС содержит ограниченный объем информации, обычно - высоту самолета и его местный номер опознавания (local identity). В недавнее время было предложено организовать между запросчиком и запрашиваемым самолетом двунаправленную цифровую линию связи с высокой пропускной способностью, обеспечивающую более обширный обмен данными, причем режим работы с использованием такой линии получил наименование режим "S", где "S" означает "селективный" режим.
Принятые на международном уровне технические характеристики вторичных радиолокационных систем описаны в документе Международной организации гражданской авиации (International Civil Avition Organisation) "Авиационная связь. Дополнение 10" в разделе 3.8 ("Aeronautical Telecommunications, Annex 10", Section 3.8) Раздел 3.8.1 охватывает обычные ВРЛС, а раздел 3.8.1 ВРЛС, работающие в режиме "S".
В соответствии с приведенным стандартом режим "S" ВРЛС имеет две основные особенности. Первая особенность позволяет каждому ответчику самолета присваивать 25-битный адрес, являющийся уникальным во всем мире. Следовательно, запрос может быть направлен определенному самолету и являться, таким образом, выборочным, а ответ самолета также содержит его уникальный адрес. Данная особенность позволяет организовать оптимальную обработку ответного сигнала запросчиком.
Вторая особенность обеспечивает автоматическую передачу как с Земли в воздух, так и с воздуха на Землю больших объемов информации, которой обычно служба управления воздушным движением (Air Traffic Control) обменивается с пилотом самолета при помощи голосовой связи в СВЧ-диапазоне частот. Таким образом, автоматически передаваемые данные между наземной службой и самолетом в режиме "S" могут содержать передаваемую с Земли информацию по управлению полетами и по местным погодным условиям, а также передаваемую с самолета на Землю информацию о запасе топлива, параметрах работы двигателей и погоде.
Кроме того, запросчик для ВРЛС и, в частности для ВРЛС в режиме "S", должен иметь возможность изменять мощность передаваемых им сигналов на протяжении периода вращения диаграммы направленности антенны. Дальность действия запроса зависит от мощности передаваемых радиолокационных сигналов и поэтому, изменяя мощность, можно обеспечить избирательность системы по дальности. Требуемый диапазон изменения мощности обычно составляет около 12 дБ в сторону уменьшения от максимальной излучаемой мощности с шагом 2 дБ. Точность установки мощности для каждого уровня обычно составляет ± 1 дБ, а время переключения с одного уровня мощности на другой обычно находится в диапазоне от 10 до 50 мкс.
До настоящего времени оказалось сложным добиться эффективного, быстрого переключения передаваемой мощности ВРЛС, и в настоящем изобретении предложено решение этой проблемы.
Краткое изложение сущности изобретения
В соответствии с настоящим изобретением разработана вторичная радиолокационная станция, содержащая передающее средство для передачи радиолокационных сигналов на запрашиваемый ответчик, установленный на удаленной цели; приемное средство для приема ответных сигналов от запрашиваемого ответчика, установленного на цели, а также источник с управляемой мощностью для формирования высокочастотных сигналов для передающего средства, содержащий средство для формирования первого и второго высокочастотных сигналов с заданным фазовым соотношением; средство установки фазы для выборочной установки фазового отношения между первым и вторым сигналами, первое и второе средства усиления мощности для усиления соответственно первого и второго сигналов, средство объединения мощности для объединения первого и второго сигналов, усиленных средствами усиления мощности, с целью получения усиленного выходного высокочастотного сигнала с мощностью, зависящей от фазового отношения установленного средством установки фазы.
При помощи изобретения оказывается возможным быстро изменять мощность передаваемого сигнала за счет изменения фазового отношения между первым и вторым сигналами. Это может быть реализовано при помощи фазовращателя с электронным управлением. В результате, в соответствии с настоящим изобретением мощность передаваемого сигнала может изменяться со скоростью, достаточной для того, чтобы удовлетворять вышеупомянутым требованиям режима "S".
Изобретение также распространяется на способ работы вторичной радиолокационной станции, передачу радиолокационных сигналов таким образом, чтобы запросить ответчики, установленные на удаленных целях; прием ответных сигналов от запрошенных ответчиков на целях; а также управление мощностью сигналов, формируемых передающим средством, включающее формирование первого и второго высокочастотных сигналов; выборочную установку фазового отношения между первым и вторым сигналами; усиление соответственно первого и второго сигналов, объединение первого и второго сигналов, усиленных средствами усиления мощности с целью получения усиленного выходного высокочастотного сигнала с мощностью, зависящей от установленного фазового отношения, и подачу выходного сигнала на передающее средство.
Краткое описание чертежей
Для лучшего пояснения изобретения далее в качестве примера приводится вариант его предпочтительного воплощения со ссылками на сопутствующие чертежи, на которых:
фиг.1 иллюстрирует схематическое изображение летательного аппарата, запрашиваемого ВРЛС в режиме "S", в соответствии с настоящим изобретением;
фиг. 2 иллюстрирует структурную схему ВРЛС, работающую в режиме " S", в соответствии с настоящим изобретением;
фиг.3 иллюстрирует векторную диаграмму, на которой показаны фазовые векторы V для первого и второго каналов, приведенных на фиг.2.
Описание предпочтительного варианта выполнения изобретения
На фиг. 1 показано, что запросчик 1 наземной ВРЛС, работающей в режиме "S", оснащен вращающейся антенной 2, которая передает радиолокационные сигналы 3 для запроса ответчиков, установленных на летательных аппаратах типа самолета 4. Антенна 2 также используется для приема ответных сигналов 5 от запрошенных ответчиков, которые затем поступают на приемник запросчика 1. Обычно запросчик наземной линией связи соединен со станцией управления (не показана).
В процессе использования антенна 2 формирует вращающуюся диаграмму направленности, причем в варианте воплощения, показанном на фиг.1, антенна представляет собой решетку с механическим вращением. Однако необходимо отметить, что также может использоваться неподвижная решетка с электронным управлением. Система, изображенная на фиг.1, использует моноимпульсный способ передачи. Используются два луча, включающие основной луч, который формирует суммарную диаграмму направленности, и еще один луч, формирующий разностную диаграмму направленности. Суммарная диаграмма направленности включает основной лепесток, ориентированный по пеленгу (boresight) антенны, а разностная диаграмма направленности включает боковые лепестки, расположенные симметрично по обе стороны относительно пеленга антенны, который в нуле имеет разворот фазы на 180 градусов. Диаграмма направленности позволяет точно оценивать азимут установленного на самолете ответчика, находящегося вне пеленга, путем сравнения амплитуд и фаз сигналов, соответствующих двум диаграммам направленности. Подробное описание приведено в ранее упоминавшейся работе "Радиолокационные системы".
На фиг.2 показаны схемы, подающие на антенну высокочастотный сигнал для формирования суммарного луча. Ясно, что как и в обычной ВРЛС в данном случае будет использована соответствующая схема для ненаправленного (omnidirectional) луча. однако эта схема не показана на фиг. 2 для лучшей ясности чертежа.
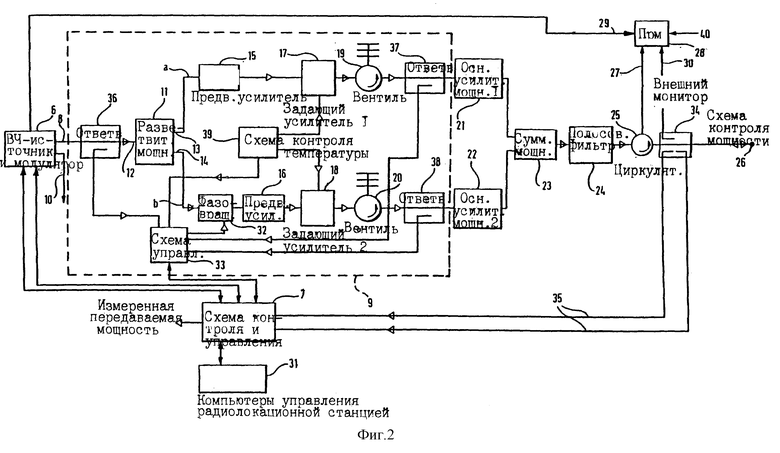
На фиг. 2 источник с управляемой мощностью включает источник высокочастотных сигналов и схему 6 модуляции, формирующие непрерывное излучение запросного сигнала на радиочастоте 1030 МГц, на который затем накладывается импульсная модуляция под управлением блока 7 управления и контроля. Импульсная модуляция кодирует запросный сигнал информацией, передаваемой на летательный аппарат 4, в соответствии с протоколом ВРЛС, работающей в режиме "S". Выходной сигнал с импульсной модуляцией поступает по линии 8 в схему 9 основного задающего усилителя (main driver amplifier circuit), показанную пунктирной линией. Основной задающий усилитель 9 управляет мощностью сигнала, передаваемого в основном луче. Модулятор также подает в линию 10 выходной сигнал, модулируемый другим информационным потоком, предназначенный для формирования ненаправленной диаграммы направленности и мощность которого управляется другим задающим усилителем, аналогичным усилителю 9 (не показан). Так как схемы для ненаправленной диаграммы направленности аналогичны схемам, использующимся для формирования сигнала, передаваемого в основном луче, то эти схемы не будут описываться отдельно.
Основной задающий усилитель 9 включает в себя разветвитесь 11 мощности, на вход 12 которого поступают сигналы из линии 8, а с выходов 13 и 14 сигналы Va и Vb равной амплитуды и фазы подаются в первый и второй каналы a и b, соответственно. Сигналы Va и Vb через соответствующие предварительные усилители 15 и 16, задающие усилители 17 и 18, а также вентили 19 и 20 подаются на соответственно первый и второй основные усилители мощности 21 и 22.
Выходные сигналы первого и второго основных усилителей мощности 21 и 22 поступают на сумматор мощности 23, выходной сигнал которого через полосовой фильтр 24 и циркулятор 25 поступает на выход 26 для формирования основного луча антенны. Таким образом, в процессе работы сигналы с импульсной модуляцией в линии 8 усиливаются в соответствующих каналах a и b сначала усилителями 15 и 17, а также 16 и 18, а затем при помощи усилителей мощности 21 и 22 результирующие усиленные сигналы объединяются в сумматоре 23 мощности и подаются на выход 26 в качестве запросного сигнала для ответчиков, установленных на самолетах. Принятые ответные сигналы ответчиков с антенны поступают на выход 26. Циркулятор 52 направляет ответные сигналы в линию 27 к приемной схеме 28, которая демодулирует ответные сигналы при помощи местного гетеродина (не показан), настраиваемого на частоту источника 6 радиосигнала по линии 29. Приемник 28 по линии 30 принимает также с антенны ответные сигналы, соответствующие разностной диаграмме направленности, а по линии 40 - сигналы, соответствующие ненаправленной диаграмме направленности, после чего эти сигналы обрабатываются известным способом для получения идентификационной информации о летательном аппарате и других рабочих данных, передаваемых ответчиком самолета. Кроме того, дальность до летательного аппарата и его азимут вычисляются известным способом на основе временной задержки между исходным импульсом переданного запроса и соответствующим этому запросу ответом, полученным с ответчика, а также с использованием информации об угле вращения диаграммы направленности антенны. Подобные способы обработки сигналов хорошо известны и далее не описываются. Полученная информация с приемника 28 поступает (при помощи не показанных на чертеже средств) в компьютеры 31 управления радиолокационной станцией, которые обеспечивают слежение за летательным аппаратом. Компьютеры задают также информацию, передаваемую на самолет, путем управления через схему 7 управления и контроля импульсной модуляцией сигнала, поступающего от источника 6.
Показанные на фиг.2 усилители обычно обеспечивают максимальную импульсную мощность на выходе 26 до 1950 Вт, что соответствует 62,9 дБмВт. Стандарт режима "S" работы ВРЛС требует, чтобы мощность снижалась от максимальной дискретно по 2 дБ до уровня на 12 дБ ниже максимального, т.е. до 50,9 дБмВт.
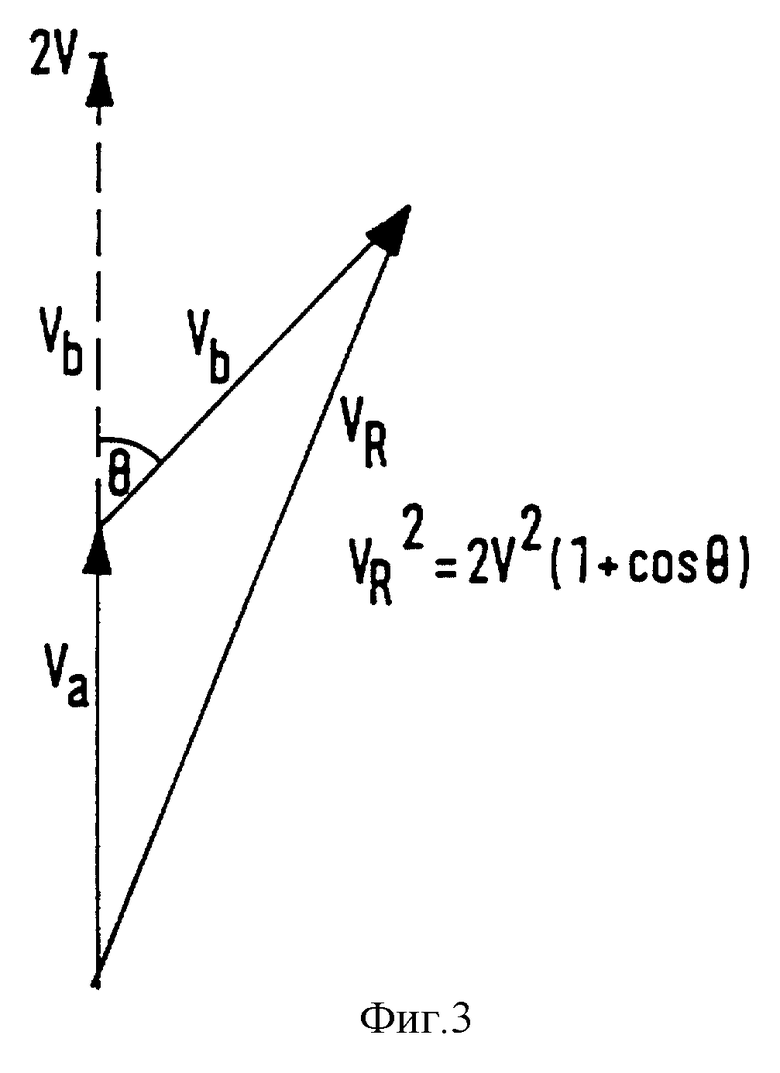
В соответствии с изобретением это достигается при помощи фазовращателя 32, который изменяет фазу сигнала Vb относительно фазы сигнала Va. Это схематично показано на фиг. 3.
Когда фазовые векторы Va и Vb находятся в фазе, т.е. фазовращателем 32 не вносится фазового сдвига, фазовые векторы выравниваются в соответствии с тем, как это показано пунктирными линиями, в результате чего суммарный фазовый вектор, получающийся при объединении сигналов в сумматоре мощности 23, составляет 2V. Напротив, когда фазовые векторы находятся, в противофазе, результирующий вектор становится нулевым. За счет введения при помощи фазовращателя 32 фазового сдвига, фазовый угол θ между векторами Va и Vb может быть изменен, как это показано на фиг. 3, причем результирующий вектор VR определяется из выражения
V
В выражении (1) полагалось, что амплитуды сигналов, в каналах a и b одинаковы, т.е. Va = Vb = V.
Таким образом, изменяя избирательно фазовый угол θ при помощи фазовращателя 32, амплитуда результирующего вектора VR, полученного сумматором мощности 23, может изменяться от нуля до 2V.
Фазовый угол θ, вводимый фазовращателем 32, устанавливается при помощи схемы управления 33 под управлением компьютеров 31 радиолокационной станции через схему контроля и управления 7. Таким образом компьютеры 31 радиолокационной станции могут устанавливать требуемую дальность действия радиолокационной станции путем управления выходной мощностью сигнала, подаваемого на выход 26, что достигается в свою очередь изменением фазового сдвига, вносимого фазовращателем 32. Сдвиг фаз может быть выполнен быстро, за время в диапазоне от 10 до 50 мкс, с точностью порядка ± 1 дБ и с шагом 2 дБ так. чтобы соответствовать дальности действия, выбираемой при вращении диаграммы направленности антенны.
На практике в качестве фазовращателя 32 может использоваться устройство QQ 1668, изготавливаемое фирмой KDI/Triangle Electronics Inc,, East Hanover, New Jersey 07936, USA.
Кроме того, разработаны схемы для динамичного управления и контроля уровня мощности для его поддержания в соответствии с конкретным выбранным значением. С этой целью к выходу 26 подключается схема 34 контроля мощности, обеспечивающая подачу в схему 7 контроля и управления сигналов, соответствующих динамической выходной мощности в линиях 35. Сигналы сравниваются с опорными значениями, характеризующими уровень требуемой выходной мощности, задаваемый компьютерами 31 радиолокационной станции. Сигнал, указывающий на разницу между действительной контролируемой мощностью и требуемым значением, подается в схему 33 управления для небольшой регулировки фазового сдвига, вносимого фазовращателем 32, с тем, чтобы вернуть уровень выходной мощности к требуемому значению. Ясно, что требуемое значение выходной мощности под управлением компьютеров 31 радиолокационной станции будет динамично изменяться в процессе вращения диаграммы направленности антенны, и действие описанной цепи обратной связи приведет к тому, что выходная мощность будет поддерживаться в соответствии с требуемым значением.
Для контроля сигналов Va и Vb в процессе работы предусмотрены дополнительные контуры управления. С этой целью схемы 36, 37 и 38 контроля мощности подключены соответственно ко входу 12 разветвителя 11 мощности и к выходам задающих усилителей 17 и 18. Схемы 36, 37 и 38 контроля формируют соответствующие входные сигналы схемы 33 управления с тем, чтобы фазовращатель 32 компенсировал колебания амплитуд и фаз соответствующих контролируемых сигналов.
Кроме того, рабочая температура задающей схемы 9 контролируется при помощи схемы 39 контроля температуры, и коэффициенты усиления усилителей 17 и 18 управляются таким образом, чтобы компенсировать изменения коэффициентов усиления, которые могут быть вызваны температурными колебаниями.
Подробное описание элементов схемы на фиг. 2 представлено в работе "Радиочастотные транзисторы" ("Radio Frequency Transistors" N.Dye & H.Granberg, Butterworth Heinemann 1993, 1993).
Таким образом, в соответствии с изобретением мощность передаваемого сигнала, подводимого к выходу 26, может динамически изменяться по мере вращения диаграммы направленности антенны, что обеспечивает динамический выбор дальности действия радиолокационной системы. Несмотря на то, что изобретение было описано на примере ВРЛС, работающей в режиме "S", ясно, что изобретение может быть использовано также и в других вторичных обзорных радиолокационных станциях, в которых в процессе работы требуется быстрое и точное изменение выходной мощности, например для сокращения передаваемой мощности в заданном азимутальном секторе, в пределах которого излучение на полной мощности будет создавать помехи для других радиолокационных станций и электронного оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моноимпульсная вторичная радиолокационная система с режимом S | 2013 |
|
RU2606386C2 |
| Радиолокационный запросчик с системой активных фазированных решеток | 2020 |
|
RU2742943C1 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК СИСТЕМЫ АКТИВНОГО ЗАПРОСА-ОТВЕТА | 2008 |
|
RU2375723C2 |
| Способ построения радиолокационного запросчика | 2019 |
|
RU2713621C1 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2002 |
|
RU2234109C1 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| Антенная система вторичного радиолокатора | 2015 |
|
RU2626221C2 |
| Антенная система вторичного радиолокатора | 2020 |
|
RU2724368C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 1997 |
|
RU2122218C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2007 |
|
RU2360266C1 |
Вторичная обзорная радиолокационная станция, например радиолокационная станция, работающая в режиме "S", содержит источник с управляемой мощностью, в котором первый и второй синфазные высокочастотные сигналы получаются из источника при помощи разветвителя, а фазовращатель избирательно регулирует относительную фазу сигналов таким образом, чтобы после усиления основными усилителями и объединения суммарной мощности результирующий уровень мощности мог бы управляться фазовым сдвигом, вносимым фазовращателем, что и является достигаемым техническим результатом. 2 с. и 20 з.п. ф-лы, 3 ил.
| Radar Systems/ (Радиолокационные системы), Paul A.Zynn, Macmillan, 1987, Chapter 6, p.109-119 | |||
| JP 61100029 A, 19.05.86 | |||
| RU 94020849 A1, 10.08.96 | |||
| RU 94014802 A1, 20.03.96 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗАПРОСА - ОТВЕТА И ЗАПРОСЧИК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2029971C1 |
| US 4316190 A, 16.02.82 | |||
| Устройство для определения места повреждения на линиях электропередачи | 1976 |
|
SU577479A1 |
