Изобретение относится к радиолокации и может быть использовано в радиолокационных системах опознавания объектов.
Известен способ радиолокационного активного запроса - ответа [1 - Патент РФ 2022296, «Способ радиолокационного активного запроса-ответа и устройство для его осуществления», опубл. 30.10.1994], в котором излучают запросные импульсы через суммарную диаграмму направленности (ДН) антенны, а импульс подавления - через разностную ДН, в ответчике измеряют отношение амплитуды импульса подавления к амплитудам запросных импульсов и излучают ответный сигнал, если это отношение не превышает заданной величины, отличающийся тем, что, с целью повышения достоверности опознавания и точности измерения угловой координаты путем повышения средней по множеству целей разрешающей способности по углу и снижения среднего уровня излучаемой запросчиком мощности, снижают мощность запросных импульсов, излучаемых через суммарную ДН, пропорционально квадрату отношения максимальной дальности действия запросчика к дальности конкретной запрашивающей цели, сохраняя максимальной мощность импульса подавления, излучаемого через разностную ДН.
Недостатком известного способа является использование антенны с неподвижной ДН, направленной по нормали к ее раскрыву, поэтому для выполнения запросов в требуемом азимутальном направлении необходимо перемещение раскрыва антенны с помощью механического вращения.
Известен способ радиолокационного активного запроса - ответа [2 - Патент РФ 2029971, «Способ радиолокационного активного запроса-ответа и запросчик для его осуществления», опубл. 27.02.1995], в котором осуществляется последовательное генерирование сигнала запроса в точке наблюдения и его излучение в угле обзора, прием на сопровождаемом объекте сигнала запроса, генерирование и излучение ответного сигнала, прием в точке наблюдения ответного сигнала двухканальной антенной, у которой диаграмма направленности первого канала сосредоточена в угле разрешения, а диаграмма направленности второго канала равномерно распределена за пределами угла разрешения, формируют третий сигнал, равный отношению амплитуды второго сигнала, принятого по второму каналу, к амплитуде первого сигнала, принятого по первому каналу, и осуществляют отбраковку выборок первого сигнала так, что выборка первого сигнала считается годной, если соответствующая ей выборка третьего сигнала не превышает заданный порог, отличающийся тем, что, с целью повышения вероятности обнаружения сопровождаемого объекта, повышения точности измерения его угловой координаты, а также увеличиения разрешающей способности за счет подавления сигналов, поступающих со всех направлений, кроме рабочего сектора главного лепестка диаграммы направленности первого канала антенны, в процессе приема ответного сигнала его ослабляют в первом канале в Xi раз, где Xi - отношение уровня диаграммы направленности по мощности первого канала в направлении источника помехи к уровню диаграммы направленности второго канала в i-м направлении, в каждом периоде запроса до момента времени, соответствующего дальности, большей  и меньшей
и меньшей  , где DX0 - максимальная дальность обнаружения сопровождаемого объекта; Zi - отношение уровня максимума диаграммы направленности по мощности первого канала к ее уровню в i-м направлении.
, где DX0 - максимальная дальность обнаружения сопровождаемого объекта; Zi - отношение уровня максимума диаграммы направленности по мощности первого канала к ее уровню в i-м направлении.
Недостатком известного способа является использование антенны с неподвижной ДН, направленной по нормали к ее раскрыву, поэтому для выполнения запросов в требуемом азимутальном направлении необходимо перемещение раскрыва антенны с помощью механического вращения.
Наиболее близким по технической сущности к предлагаемому способу является способ построения радиолокационного запросчика [3 - стр. 67-68, 73-77, Давыдов П.О., Сосновский А.А., Хаймович И.А. Авиационная радиолокация. М.: Транспорт. 1984. - 223 с.], принятый за прототип, заключающийся в том, что в режиме передачи формируют код запроса в шифраторе в соответствии с режимом работы запросчика, модулируют им сигнал передатчика, сигнал с выхода которого подают в основную антенну, излучающую его в пространство, формируют сигнал подавления боковых лепестков, который излучают через антенну подавления.
В режиме приема ответный сигнал от ответчика принимают основной антенной и антенной подавления, эти сигналы усиливают, сравнивают амплитуды этих сигналов между собой, при этом в случае если сигнал с основной антенны превышает сигнал с антенны подавления, дешифруют его в дешифраторе и подают на аппаратуру первичной обработки информации.
Обзор воздушного пространства по азимуту осуществляется путем вращения основной антенны и антенны подавления.
К недостаткам прототипа следует отнести:
- использование антенны с неподвижной ДН, направленной по нормали к ее раскрыву, поэтому для выполнения запросов в требуемом азимутальном направлении необходимо механическое вращение антенны;
- ограниченный сектор работы в угломестной плоскости не превышающий от 30° до 40° [3 - стр. 79], в то время как в современных условиях часто требуются более широкие сектора работы.
Технической проблемой, на решение которой направлен предлагаемый способ, является обеспечение электронного сканирования азимутального направления запроса при неподвижной антенне.
Для решения указанной технической проблемы предлагается способ построения радиолокационного запросчика, при котором используют антенную систему, имеющую диаграмму направленности с основным передающим лучом и лучом подавления, в режиме передачи формируют код запроса в шифраторе в соответствии с режимом работы запросчика, модулируют им сигнал запроса и излучают в пространство через основной луч диаграммы направленности, формируют сигнал подавления боковых лепестков, который излучают через луч подавления, в режиме приема ответный сигнал от ответчика принимают основным приемным лучом и лучом подавления, сравнивают амплитуды этих сигналов между собой, при этом в случае если сигнал, принимаемый основном лучом превышает сигнал, принимаемый лучом подавления, дешифруют его в дешифраторе, сравнивают с признаком ответного кода, установленным на текущий момент времени, обрабатывают результаты сравнения, при этом определяют дальность и азимут опознаваемого объекта, а также выделяют полученную полетную информацию.
Согласно изобретению, используют антенную систему в виде плоской активной фазированной антенной решетки, содержащей N приемопередающих каналов, в режиме приема формируют основной приемный луч, второй приемный луч и луч подавления путем весового суммирования принимаемых сигналов с выходов приемопередающих каналов, причем максимумы основного и второго приемного лучей разнесены на некоторый угол, формируют основной передающий луч и луч подавления в режиме передачи путем установки фазовых соотношений между передающими частями приемопередающих каналов или путем использования части приемопередающих каналов для формирования основного передающего луча, а остальных приемопередающих каналов - для формирования луча подавления, принимают ответный сигнал от ответчика основным и вторым приемными лучами и лучом подавления, измерение азимута осуществляют с помощью суммарно-разностной обработки сигналов с выходов основного и второго приемных лучей, а сравнение амплитуды сигнала, принимаемого по лучу подавления, производят с суммарным сигналом основного и второго приемных лучей, при этом электронное сканирование лучей диаграммы направленности в азимутальной плоскости выполняют путем установки требуемых фазовых соотношений в приемопередающих каналах, антенные элементы которых расположены по горизонтали, а при необходимости сканирования в угломестной плоскости выполняют установку требуемых фазовых соотношений в приемопередающих каналах, антенные элементы которых расположены по вертикали.
Техническим результатом предлагаемого изобретения является увеличение сектора работы в угломестной плоскости при неподвижной антенной системе за счет использования электронного сканирования ДН.
Проведенный сравнительный анализ предлагаемого способа и прототипа показывает, что их отличие заключается в следующем:
- в прототипе используется антенная система с фиксированным направлением ДН в азимутальной плоскости, поэтому для обзора пространства по азимуту необходимо механическое вращение антенной системы, в то время как в предлагаемом способе используется электронное сканирование ДН, что обеспечивает обзор пространства по азимуту в некотором секторе пространства при неподвижной антенной системе;
- в прототипе используется антенная система с фиксированным направлением ДН в угломестной плоскости, поэтому сектор обзора пространства в угломестной плоскости фиксирован и ограничен диапазоном от 30° до 40°, в то время как в предлагаемом способе за счет электронного сканирования возможно значительное увеличение сектора обзора, например, до 60°, т.е. увеличение от 50 до 100%.
Сочетание отличительных признаков и свойства предлагаемого способа из литературы не известно, поэтому он соответствует критериям новизны и изобретательского уровня.
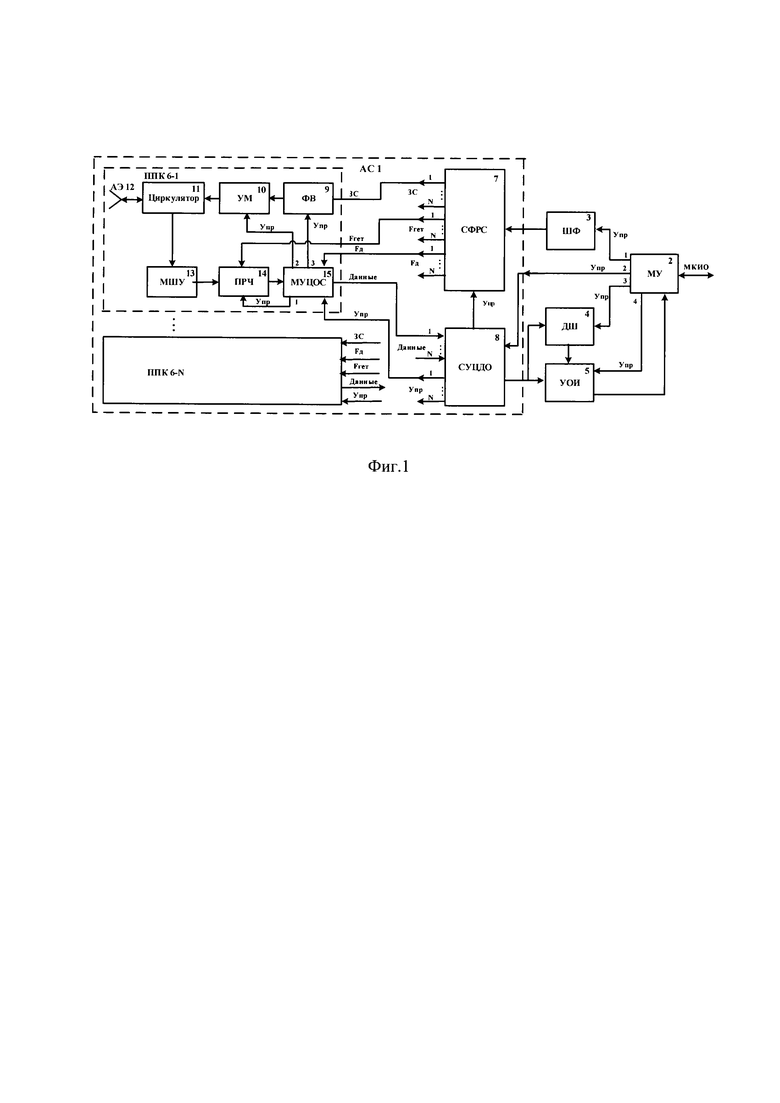
На фиг. 1. приведена структурная схема устройства, обеспечивающего реализацию предложенного способа.
На фиг. 2. приведена структурная схема системы управления и цифрового диаграммообразования.
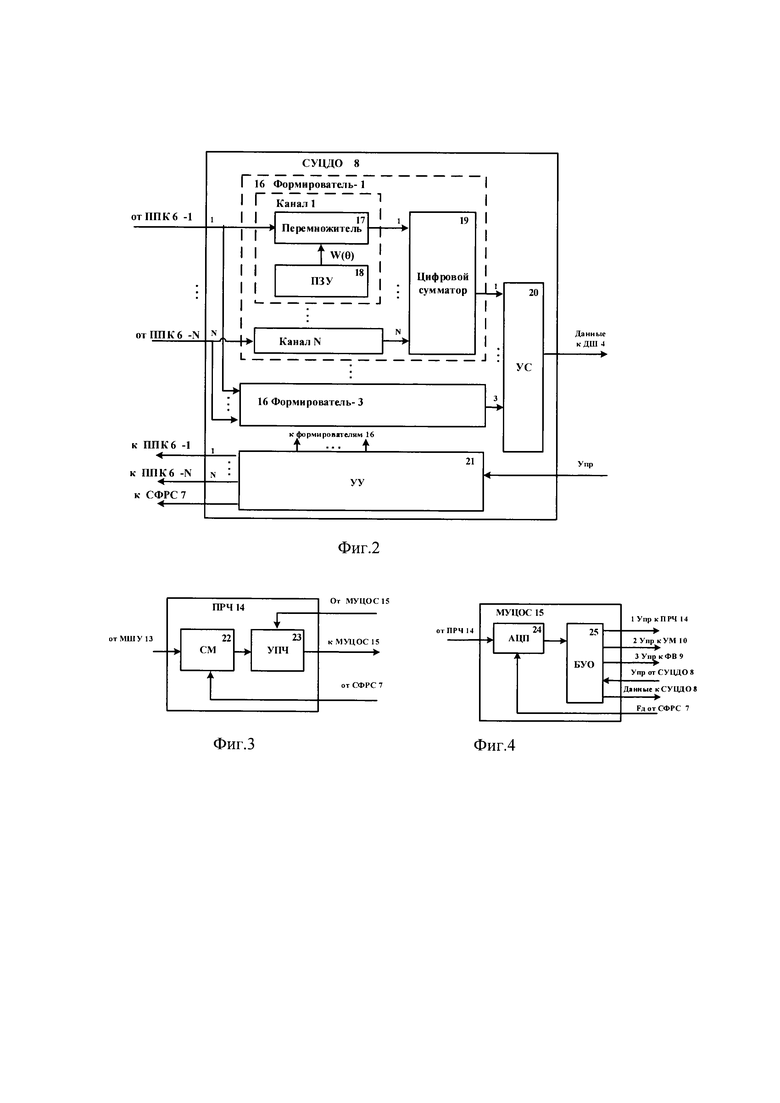
На фиг. 3. приведена структурная схема преобразователя частоты.
На фиг. 4. приведена структурная схема модуля управления и цифровой обработки сигналов.
При реализации предложенного способа выполняется следующая последовательность действий:
- используют антенную систему, имеющую диаграмму направленности (ДН) с основным лучом и лучом подавления - 1;
- используют антенную систему в виде плоской активной фазированной антенной решетки, содержащей N приемопередающих каналов - 2;
- в режиме передачи формируют код запроса в шифраторе в соответствии с режимом работы запросчика, модулируют им сигнал запроса и излучают в пространство через основной передающий луч диаграммы направленности, формируют сигнал подавления боковых лепестков, который излучают через луч подавления - 3;
- в режиме приема формируют основной приемный луч, второй приемный луч и луч подавления путем весового суммирования принимаемых сигналов с выходов приемопередающих каналов, причем максимумы основного и второго приемного лучей разнесены на некоторый угол - 4,
- принимают ответный сигнал от ответчика основным и вторым приемными лучами и лучом подавления, сравнение амплитуды сигнала, принимаемого по лучу подавления, производят с суммарным сигналом основного и второго приемных лучей, при этом в случае, если этот сигнал, превышает сигнал, принимаемый лучом подавления, дешифруют его в дешифраторе, сравнивают с признаком ответного кода, установленным на текущий момент времени, обрабатывают результаты сравнения, при этом определяют дальность и азимут опознаваемого объекта и выделяют полученную полетную информацию, при этом измерение азимута осуществляют с помощью суммарно-разностной обработки сигналов с выходов основного и второго приемных лучей - 5;
- формируют основной передающий луч и луч подавления в режиме передачи путем установки фазовых соотношений между передающими частями приемопередающих каналов или путем использования части приемопередающих каналов для формирования основного передающего луча, а остальных приемопередающих каналов - для формирования луча подавления - 6;
- электронное сканирование лучей ДН в азимутальной плоскости выполняют путем установки требуемых фазовых соотношений в приемопередающих каналах, антенные элементы которых расположены по горизонтали, а при необходимости сканирования в угломестной плоскости выполняют установку требуемых фазовых соотношений в приемопередающих каналах, антенные элементы которых расположены по вертикали - 7.
Предложенный способ может работать как с электронным сканированием диаграммы направленности (ДН) по азимуту при неподвижной антенной системе (АС), так и при сканировании ДН по азимуту за счет механического вращения АС.
Реализация предложенного способа построения радиолокационного запросчика возможна, например, с помощью устройства, включающего в себя (фиг. 1) АС 1, модуль управления (МУ) 2, первый управляющий выход которого подключен к управляющему входу шифратора (ШФ) 3, второй управляющий выход - ко входу управления АС 1, третий управляющий выход - к управляющему входу дешифратора (ДШ) 4, четвертый управляющий выход - к управляющему входу устройства обработки информации (УОИ) 5, а вход - к выходу УОИ 5.
МУ 2 также имеет мультиплексный канал информационного обмена (МКИО), являющийся входом-выходом устройства.
АС 1 включает в себя N приемопередающих каналов (ППК) 6, систему формирования и распределения сигналов (СФРС) 7 и систему управления и цифрового диаграммообразования (СУЦДО) 8.
СФРС 7 имеет N выходов запросного сигнала (ЗС), соединенных со входами ЗС ППК 6, N выходов дискретизации Fд, соединенных со входами дискретизации ППК 6, N выходов гетеродина Fгет, соединенных с гетеродинными входами ППК 6. Вход СФРС 7 соединен с выходом ШФ 3.
ППК 6 содержат последовательно соединенные фазовращатель (ФВ) 9, твердотельный усилитель мощности (УМ) 10, циркулятор 11 и антенный элемент (АЭ) 12. К выходу циркулятора 11 подключены последовательно соединенные малошумящий усилитель (МШУ) 13, преобразователь частоты (ПРЧ) 14, гетеродинный вход которого является гетеродинным входом ППК 6 и модуль управления и цифровой обработки сигналов (МУЦОС) 15, вход дискретизации которого является входом дискретизации ППК 6.
Выход данных МУЦОС 15 является выходом данных ППК 6 и соединен с одним из N входов данных СУЦДО 8, управляющий вход МУЦОС 15 является управляющим входом ППК 6 и соединен с одним из N управляющих выходов СУЦДО 8. Первый, второй и третий управляющие выходы МУЦОС 15 соединены соответственно с управляющими входами ПРЧ 14, УМ 10 и фазовращателя 9. Выход данных СУЦДО 8 соединен со входом ДШ 4 и входом данных УОИ 5. N+1 управляющий выход СУЦДО 8 соединен с управляющим входом СФРС 7.
Выход ДШ 4 соединен со вторым входом данных УОИ 5.
СУЦДО 8 (фиг. 2) имеет 3 формирователя 16 по числу формируемых приемных лучей, каждый из которых содержит N каналов, при этом входы k-тых каналов (k=1…N) в формирователях 16 объединены. Каждый канал формирователя 16 содержит перемножитель 17, первый вход которого является входом канала, ко второму входу подключен выход постоянного запоминающего устройства (ПЗУ) 18, а выход перемножителя 17 является выходом канала и подключен к одному из N входов цифрового сумматора 19, выход которого подключен к одному из 3 входов устройства сравнения (УС) 20. Выход УС 20 является выходом СУЦДО 8. Устройство управления (УУ) 21, вход которого является управляющим входом СУЦДО 8, имеет N+1 управляющих выходов, которые являются управляющими выходами СУЦДО 8, а также три управляющих входа на формирователи 16. Все блоки СУЦДО 8 могут быть выполнены, в зависимости от числа ППК 6, в виде одной или нескольких программируемых логических интегральных схем (ПЛИС).
ПРЧ 14 (фиг. 3) представляет собой последовательно соединенные смеситель (СМ) 22, вход которого является входом ПРЧ 14, а гетеродинный вход - гетеродинным входом ПРЧ 14 и усилитель промежуточной частоты (УПЧ) 23, выход которого является выходом промежуточной частоты (ПЧ) ПРЧ 14, а управляющий вход - управляющим входом ПРЧ 14.
МУЦОС 15 (фиг. 4) представляет собой последовательно соединенные аналого-цифровой преобразователь (АЦП) 24, вход которого является входом ПЧ МУЦОС 15, а тактовый вход является входом дискретизации МУЦОС 15 и блок управления и обработки (БУО) 25. Первый, второй и третий управляющие выходы БУО 25 являются соответственно первым, вторым и третьим управляющим выходами МУЦОС 15. Выход данных и управляющий вход БУО 25 являются соответственно выходом данных и управляющим входом МУЦОС 15.
СФРС 7 представляет собой три синтезатора частоты, обеспечивающих формирование запросного сигнала ЗС или сигнала подавления боковых лепестков, сигнала тактовой частоты дискретизации Fд, и сигнала гетеродина Fгет. При этом могут быть использованы, например, синтезаторы из [4 - стр. 142-143. Mini-Circuits. RF & Microwave components guide. 2010]. Сформированные в синтезаторах сигналы разветвляются на N выходов с помощью делителей мощности [4 - стр. 136-140].
УОИ 5 может быть выполнено на ПЛИС или процессоре, обеспечивающем обработку информацию по заданному алгоритму.
МУ 2 может быть выполнено на ПЛИС или процессоре, обеспечивающем управление работой устройств АС 1, ШФ 3, ДШ 4 и УОИ 5, а также прием управляющих команд и передачу полученных данных опознавания и измеренной дальности по МКИО.
Устройство может работать как с электронным сканированием ДН по азимуту при неподвижной АС 1, так и при сканировании ДН по азимуту за счет механического вращения АС 1 при установке ее на опорно-поворотное устройство (на фиг. 1 не показано). Сектор сканирования по азимуту в первом случае определяется шагом размещения излучателей АС 1, а во втором случае равен 360°.
При поступлении на вход МКИО МУ 2 команд управления с режимом работы запросчика, координатами направления ДН по азимуту ϕ и углу места θ, а также кода ожидаемого ответного сигнала (при необходимости), они преобразуются в команды управления устройствами запросчика.
С первого выхода МУ 2 соответствующие команды поступают на вход шифратора 3, где формируется код запроса в соответствии с режимом работы запросчика. С третьего выхода МУ 2 на управляющий вход дешифратора 4 передается признак кода ответного сигнала, установленный на текущий момент. С выхода шифратора 3 код запроса поступает на формирователь сигнал запроса (на фиг. 1 не показан) из состава СФРС 7, который формирует пакет сверхвысокочастотных (СВЧ) радиоимпульсов сигнала запроса (ЗС) в заданном режиме опознавания объектов, эти сигналы подаются на все ППК 6, сдвигаются по фазе в фазовращателях 9, усиливаются в УМ 10 и излучаются в заданном направлении ϕ0, θ0 через АЭ 12.
Формирование основного луча передающей ДН производится путем установки в ППК 6 требуемых фазовых и амплитудных соотношений регулировкой сдвига фазы сигнала запроса ЗС в фазовращателях 9 и коэффициента усиления усилителей мощности УМ 10. Направление максимума передающего луча по азимуту ϕ0 и углу места θ0 передается на управляющий вход СУЦДО 8 со второго выхода МУ 2.
Для плоской прямоугольной АС 1, апертура которой содержит Nx АЭ 12, установленных вдоль координаты X на расстоянии dX, и NX АЭ 12, установленных вдоль координаты Y, на расстоянии dY, N=NXNY, диаграмма направленности луча F((ϕ,θ) определяется как [5 - стр. 27-28, Кузьмин С.З Цифровая радиолокация. Введение в теорию. - КВИЦ. 2000]:

где AXi, AYk - коэффициенты амплитудного распределения в УМ 10, соединенных с АЭ 11, которые расположены вдоль координат X и Y соответственно;
ψXi, ψYk - коэффициенты фазового распределения, представленные в виде фазовых сдвигов в фазовращателях 9, которые расположены вдоль координат X и Y соответственно.
Ширина основного луча передающей ДН в азимутальной плоскости определяется геометрическими размерами АС 1 и не превышает нескольких градусов. В угломестной плоскости основной луч передающей ДН имеет веерную форму. Форма передающей ДН может также иметь косекансную форму [6 - рис. 5.1 б - Бакулев П.А. Радиолокационные системы. М.: Радиотехника. 2007. - 376 с.], формируемую путем установки соответствующих амплитудных и фазовых коэффициентов в усилителях мощности 10 и фазовращателях 9, например, как описано в [7 - Лопатенко Э.В., Марусич А.А. Диаграмма направленности антенны cosec с низким уровнем боковых лепестков. // Радиотехника, 2006, №12, с. 49-53.].
Луч подавления имеет широкую ДН, усиление которой в направлении боковых лепестков (БЛ) основного луча передающей ДН превышает усиление БЛ основного луча [3 - рис. 3.11а]. По лучу подавления излучают сигнал подавления боковых лепестков (ПБЛ), представляющий собой СВЧ радиоимпульс с параметрами в соответствии с [3 - рис. 3.10б], который формируется в СФРС 7.
Таким образом, в соответствии с выражением (1) на время излучения сигнала запроса в АС 1 формируют основной луч передающей ДН, а на время излучения сигнала ПБЛ формируют луч подавления.
Возможен также вариант работы АС 1, при котором для формирования луча подавления среди N приемопередающих каналов АС 1 выделяются несколько каналов NП, при этом в МУЦОС 15 этих каналов записывается программа, в соответствии с которой УМ 10 в этих каналах включается только на время излучения импульса подавления. В остальных каналах УМ 10 выключаются на время излучения импульса подавления. Поскольку импульс ПБЛ передается небольшим числом каналов NП, то формируемый таким образом луч подавления имеет широкую ДН, покрывающую боковые лепестки основного передающего луча.
После излучения сигнала запроса и сигнала ПБЛ АС 1 переходит в режим приема.
В случае нахождения опознаваемого объекта, оснащенного соответствующим ответчиком в пределах основной ДН радиолокационного запросчика ответчик излучает ответные сигналы, соответствующие заданному режиму работы.
В режиме приема принимаемые сигналы от ответчика с выхода каждого АЭ 12 в каждом ППК 6 проходят через циркулятор 11, усиливаются в МШУ 13, преобразуются по частоте в ПРЧ 14 и представляются в виде цифровых отсчетов Smn(t) с помощью АЦП 24.
Из полученных цифровых отсчетов путем весового суммирования в СУЦДО 8 формируют три луча приемной ДН: основной и второй приемный луч и луч подавления, причем максимумы основного и второго приемного лучей разнесены на некоторый угол.
Отсчеты i-го луча с направлением максимума ϕi, θi вычисляются путем умножения цифрового потока с каждого АЦП 24 в перемножителях 17 на весовой множитель Wmn{(ϕi, θi) из ПЗУ 18 и суммирования в цифровом сумматоре 19. Диаграмма направленности для i-го луча имеет вид

где 
Сравнивают амплитуды ответного сигнала от ответчика, принятого основным и вторым приемными лучами и лучом подавления, между собой в устройстве сравнения 20. В случае, если суммарный сигнал, принимаемый основным и вторым приемными лучами, превышает сигнал, принимаемый лучом подавления, он поступает на дешифратор 4, в котором дешифрируется и сравнивается с признаком ответного кода, установленным на текущий момент времени. Если результат соответствует заложенному критерию в дешифраторе 4, то обрабатывают результаты сравнения в УОИ 5 по заданному алгоритму, при этом определяют дальность и азимут опознаваемого объекта и выделяют полученную полетную информацию. Измерение азимута осуществляется с помощью суммарно-разностной обработки сигналов с выходов первого и второго основных приемных лучей, как описано в [5 - стр. 174-181]
Информация с выхода УОИ 5 поступает на вход МУ 2 и далее через МКИО передается потребителю.
Возможный сектор электронного сканирования лучами ДН АС 1 определяется условием отсутствия возникновения в ДН дифракционных лепестков. В соответствии с [8 - стр. 34. Проектирование фазированных антенных решеток // Под ред. Д.И. Воскресенского. М.: Радиотехника. 2012. 744 с.], допустимый сектор сканирования ϕMAX и θMAX, соответственно, в азимутальной и угломестной плоскостях определяется шагом размещения АЭ 12 dX и dY, соответственно, по горизонтали и вертикали. Для длины волны λ шаг размещения АЭ 12 должен выбираться из неравенства:

Предлагаемый способ обеспечивает работу радиолокационного запросчика как с электронным сканированием направления запроса по азимуту при неподвижной антенной системе, так и при ее вращении. В то время как в прототипе используется антенная система с фиксированном направлением ДН в азимутальной плоскости, поэтому для выполнения запросов в требуемом азимутальном направлении необходимо механическое вращение антенной системы.
В предлагаемом способе за счет возможности электронного сканирования возможно значительное увеличение сектора работы в угломестной плоскости, например до 60°, что составит увеличение от 50 до 100%, по сравнению в прототипом, который обеспечивает угломестный сектор от 30° до 40°.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| Способ обзора пространства | 2015 |
|
RU2610833C1 |
| Способ обзора пространства | 2016 |
|
RU2621680C1 |
| Способ обзора пространства | 2021 |
|
RU2765873C1 |
| Способ обзора пространства | 2017 |
|
RU2666763C1 |
| Способ повышения надежности опознавания в радиолокационной системе активного запроса-ответа | 2020 |
|
RU2746175C1 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| Способ построения активной фазированной антенной решетки | 2020 |
|
RU2730120C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| Способ построения активной фазированной антенной решётки | 2019 |
|
RU2697194C1 |
Изобретение относится к радиолокации и может быть использовано в радиолокационных системах опознавания объектов. Достигаемый технический результат - увеличение сектора работы в угломестной плоскости при неподвижной антенной системе за счет использования электронного сканирования диаграммы направленности (ДН). Указанный результат достигается за счет того, что используют антенную систему, имеющую ДН с основным лучом и лучом подавления, в режиме передачи формируют код запроса в шифраторе в соответствии с режимом работы запросчика, модулируют им сигнал запроса и излучают в пространство через основной луч ДН, формируют сигнал подавления боковых лепестков, который излучают через луч подавления. В режиме приема ответный сигнал от ответчика принимают основным приемным лучом и лучом подавления, сравнивают амплитуды этих сигналов между собой, при этом в случае, если сигнал, принимаемый основным лучом, превышает сигнал, принимаемый лучом подавления, дешифруют его в дешифраторе, сравнивают с признаком ответного кода, установленным на текущий момент времени, обрабатывают результаты сравнения, определяют дальность опознаваемого объекта и выделяют полученную полетную информацию, при этом используют антенную систему в виде плоской активной фазированной антенной решетки, содержащей N приемопередающих каналов (ПК), в режиме приема формируют основной приемный луч, второй приемный луч и луч подавления путем весового суммирования принимаемых сигналов с выходов ПК, причем максимумы основного и второго приемного лучей разнесены на некоторый угол, формируют основной передающий луч и луч подавления в режиме передачи путем установки фазовых соотношений между передающими частями ПК или путем использования части ПК для формирования основного передающего луча, а остальных ПК - для формирования луча подавления, принимают ответный сигнал от ответчика основным и вторым приемными лучами и лучом подавления, измерение азимута осуществляют с помощью суммарно-разностной обработки сигналов с выходов основного и второго приемных лучей, а сравнение амплитуды сигнала, принимаемого по лучу подавления, производят с суммарным сигналом основного и второго приемных лучей, при этом электронное сканирование лучей ДН в азимутальной плоскости выполняют путем установки требуемых фазовых соотношений в ПК, антенные элементы которых расположены по горизонтали, а при необходимости сканирования в угломестной плоскости выполняют установку требуемых фазовых соотношений в ПК, антенные элементы которых расположены по вертикали. 4 ил.
Способ построения радиолокационного запросчика, при котором используют антенную систему, имеющую диаграмму направленности с основным передающим лучом и лучом подавления, в режиме передачи формируют код запроса в шифраторе в соответствии с режимом работы запросчика, модулируют им сигнал запроса и излучают в пространство через основной передающий луч диаграммы направленности, формируют сигнал подавления боковых лепестков, который излучают через луч подавления, в режиме приема ответный сигнал от ответчика принимают основным приемным лучом и лучом подавления, сравнивают амплитуды этих сигналов между собой, при этом в случае, если сигнал, принимаемый основным лучом, превышает сигнал, принимаемый лучом подавления, дешифруют его в дешифраторе, сравнивают с признаком ответного кода, установленным на текущий момент времени, обрабатывают результаты сравнения, при этом определяют дальность и азимут опознаваемого объекта, а также выделяют полученную полетную информацию, отличающийся тем, что используют антенную систему в виде плоской активной фазированной антенной решетки, содержащей N приемопередающих каналов, в режиме приема формируют основной приемный луч, второй приемный луч и луч подавления путем весового суммирования принимаемых сигналов с выходов приемопередающих каналов, причем максимумы основного и второго приемного лучей разнесены на некоторый угол, формируют основной передающий луч и луч подавления в режиме передачи путем установки фазовых соотношений между передающими частями приемопередающих каналов или путем использования части приемопередающих каналов для формирования основного передающего луча, а остальных приемопередающих каналов - для формирования луча подавления, принимают ответный сигнал от ответчика основным и вторым приемными лучами и лучом подавления, измерение азимута осуществляют с помощью суммарно-разностной обработки сигналов с выходов основного и второго приемных лучей, а сравнение амплитуды сигнала, принимаемого по лучу подавления, производят с суммарным сигналом основного и второго приемных лучей, при этом электронное сканирование лучей диаграммы направленности в азимутальной плоскости выполняют путем установки требуемых фазовых соотношений в приемопередающих каналах, антенные элементы которых расположены по горизонтали, а при необходимости сканирования в угломестной плоскости выполняют установку требуемых фазовых соотношений в приемопередающих каналах, антенные элементы которых расположены по вертикали.
| ДАВЫДОВ П.О | |||
| и др | |||
| Авиационная радиолокация | |||
| Москва, изд | |||
| Транспорт, 1984, с.67-68, 73-77 | |||
| 0 |
|
SU158344A1 | |
| Способ и система для определения координат цели в системе "запрос-ответ" | 2016 |
|
RU2666360C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ В АНТЕННОЙ СИСТЕМЕ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ ЛУЧОМ | 2009 |
|
RU2395141C1 |
| RU 2003130460 A, 10.02.2005 | |||
| Упор к вырубному штампу | 1977 |
|
SU722639A1 |
| Устройство для упаковки продуктов в пленку | 1980 |
|
SU943104A1 |
| US 8269664 B2, 18.09.2012. | |||

