Предлагаемая система управления относится к военной технике, а более конкретно - к системам управления подвижных объектов.
Такие системы управления позволяют осуществлять дистанционное управление различными объектами, находящимися на суше, воде или в воздухе, одним из основных назначений которых является движение в заданном направлении с высокой точностью. К таким объектам могут относиться безэкипажные танки и специальные бронеобъекты, безэкипажные плавающие машины и торпеды, дистанционно управляемые беспилотные летательные аппараты, управляемые ракеты и другие объекты. Дистанционное управление ими обеспечивает повышение живучести командных пунктов, пунктов управления и безопасности личного состава.
Эффективность систем управления указанными подвижными объектами в существенной степени зависит от действия внешних возмущений, основными из которых являются состояние местности (проходимость, закрытость, неровности и др. ), водной (воздушной) среды (направление и скорость течения (ветра), высота волн, видимость и др.), объекта (исправность, вес, парусность, состояние органов управления и др.). При этом особенно высокие требования по точности управления и его инвариантности к действию внешних возмущений предъявляются к системам управления подвижных объектов, действующих в воздухе, в частности беспилотных летательных аппаратов и управляемых ракет.
Известны ручные системы управления (см., например, Латухин А.Н. Противотанковое вооружение.- M.: Воениздат, МО СССР, 1974, c. 192-218). Они содержат привод, визирное устройство, блоки выработки управляющих сигналов и команд и линию связи, выход которой соединен с аппаратурой управления подвижным объектом.
Такие системы управления имеют следующие недостатки: маршевая скорость управляемого ими объекта не превышает 80-100 м/с, что увеличивает время полета (20-25 с), малая скорострельность, наличие непоражаемой зоны перед огневой позицией глубиной 300-600 м. Кроме того, обучение личного состава правилам стрельбы и практическим навыкам слишком дорого и сложно, так как ручное управление из-за действия внешних возмущений требует строгого отбора и тщательного обучения операторов.
Известна также система управления (см., например, Латухин A.H. Противотанковое вооружение.- М.: Воениздат, 1974, c. 225), по технической сути и существенным признакам являющаяся наиболее близкой к заявляемой и принимаемая за ее прототип. Одновременно она является базовым объектом предлагаемой системы и содержит последовательно соединенные привод, визирное устройство, съюстированный с ним координатор, блок выработки управляющих сигналов, блок выработки управляющих команд, линию связи, аппаратуру управления подвижным объектом с маркером.
Эффективность этой системы управления по сравнению с предыдущей существенно возросла. Уменьшилась непоражаемая зона, увеличилась маршевая скорость ракеты и, что самое главное, за счет ввода в систему управления координатора упростились функции оператора (его функции сводятся лишь к совмещению линии визирования с заданным направлением, а команды управления вырабатываются и передаются на объект автоматически, что повышает точность его движения и сводит к минимуму влияние индивидуальных данных оператора), благодаря чему облегчилась система отбора операторов, упростился процесс и уменьшилась стоимость обучения.
Однако для этой системы также характерны недостатки. Несмотря на ввод координатора и исключение из контура управления объектом человека-оператора, при действии на объект внешних возмущений, например силы поперечного (вертикального и горизонтального) ветра и др., движение происходит с ошибками, что существенно снижает его точность. Компенсация силы поперечного ветра ни в современных, ни в перспективных системах управления не предусмотрена. Вместе с тем известно, что на равнинной и пустынной местности точность управления подобными объектами (в том числе и управляемыми ракетами) может существенно изменяться. Это объясняется тем, что в указанных районах часто возникают мощные воздушные потоки, отклоняющие объект в полете по высоте и направлению от заданного направления. Это отклонение для рассматриваемого класса объектов ( управляемых ракет) может быть определено по выражению (см., например, Неупокоев Ф.К. Стрельба зенитными ракетами.- М.: Воениздат, 1970, c. 200-202)
где a•cosθ - нормальная к траектории составляющая ускорения от действия силы воздушного потока;
Ko - коэффициент усиления разомкнутого контура управления.
В результате действия потоков воздуха отклонение может быть существенным, что в ряде случаев приводит к невыполнению поставленной задачи.
Для объектов других классов выражение, определяющее их отклонение от заданного направления, может быть иным.
Целью настоящего изобретения является повышение эффективности управления путем повышения точности движения объекта управления (подвижного объекта) относительно заданного направления (линии визирования).
Указанная цель достигается тем, что в систему управления введены сумматор, включенный между блоком выработки управляющих сигналов и блоком выработки управляющих команд, а также последовательно соединенные ключ, датчик скорости воздушного потока, кинематически связанный с визирным устройством, функциональный блок, масштабирующий блок и инвертор, выход которого соединен со вторым входом сумматора.
Введение новых элементов и связей позволяет получить новую информацию об условиях управления (скорость воздушного потока), сформулировать и ввести в систему компенсирующую поправку, что обеспечивает повышение точности движения объекта управления (подвижного объекта) относительно заданного направления (линии визирования).
Предлагаемое техническое решение поясняется чертежом, на котором показаны взаимное расположение и связи элементов предлагаемой системы управления и приняты следующие обозначения (предлагамые элементы и связи показаны пунктиром, а сплошными линиями изображены элементы и связи прототипа):
1 - привод (ПР),
2 - визирное устройство (ВУ),
3 - маркер (М),
4 - подвижный объект (ПО),
5 - аппаратура управления (АУ),
6 - линия связи (ЛС),
7 - координатор (Ко),
8 - блок выработки управляющих сигналов (БВС),
9 - сумматор (С),
10 - блок выработки управляющих команд (БВК),
11 - ключ (Кл),
12 - датчик скорости воздушного потока (ДВП),
13 - функциональный блок (ФБ),
14 - масштабирующий блок (МБ),
15 - инвертор (Ин).
Блоки 1-10 являются штатными блоками прототипа и выполняют те же функции.
Ключ 11 обеспечивает включение датчика скорости воздушного потока 12, который обычно состоит из крыльчатки, частота вращения которой пропорциональна скорости воздушного потока, и преобразователя вращения крыльчатки в электрический сигнал (см., например, Корнеев В.В. и др. Основы автоматики и танковые автоматические системы. - М., ВА БТВ, 1976, c. 159-161). Блок 12 кинематически связан с визирным устройством 2 так, чтобы измерительная ось прибора была перпендикулярна заданному направлению, функциональный блок 13 обеспечивает возведение поданного на него сигнала с блока 12 (т.е. скорости воздушного потока) во вторую степень и его подачу на вход блока 14. Масштабирующий блок 14 обеспечивает получение сигнала, соответствующего аэродинамической силе, действующей на объект управления (подвижный объект) в результате действия воздушного потока. Его значение определяется выражением (см., например, Неупокоев Ф.К. Стрельба зенитными ракетами.- М.: Воениздат, 1970, c. 99-121)
где K - коэффициент пропорциональности, определяющий уровень сигнала на выходе блока 14 от действующей силы;
Cy - коэффициент сопротивления управляемой ракеты воздушному потоку в поперечной плоскости;
ρ - плотность воздуха;
S - характерная площадь управляемой ракеты.
Инвертор 15 обеспечивает изменение полярности сигнала с блока 14.
Работает предлагаемая система управления следующим образом. Совместив с помощью привода 1 линию визирования блока 2 с подвижным объектом 4, оператор производит его запуск и перемещает линию визирования в заданное направление. Оптический сигнал от маркера 3 подвижного объекта 4 попадает в поле зрения визирного устройства 2 и съюстированное с ним поле зрения координатора 7. Координатор обеспечивает выработку сигнала, соответствующего отклонению подвижного объекта 4 от линии визирования, и подает его на вход блока 8 выработки сигнала управления, который производит усиление и корректировку сигнала управления и подает его через сумматор 9 на блок 10 выработки управляющих команд, где преобразуется, шифруется и в виде команды управления через линию связи 6 подается на аппаратуру управления 5 подвижного объекта 4, который под действием полученной команды и своих органов управления перемещается к линии визирования, чем и устраняется рассогласование между ним и линией визирования.
При управлении в условиях равнин, степей, пустынь (то есть в условиях интенсивных перемещений воздушных масс) включается блок 11 (ключ) и начинает работать блок 12 (датчик скорости воздушного потока), который вырабатывает сигнал, пропорциональный скорости воздушного потока Vв. В блоке 13 этот сигнал возводится во вторую степень Vв 2, а в блоке 14 преобразуется в соответствии с выражением (1) и, инвертируясь в блоке 15, подается на второй вход сумматора 9 в качестве сигнала компенсации силы воздушного потока. В сумматоре 9 сигнал компенсации корректирует сигнал управления в соответствии с действующими на подвижный объект внешними возмущениями: силами, вызванными воздушными потоками.
Введенная совокупность признаков обеспечивает измерение внешнего возмущения - скорости воздушного потока, определение и формирование необходимой компенсирующей поправки, которая уменьшает (вплоть до устранения) отклонение подвижного объекта от линии визирования, что повышает точность его движения.
Предварительные расчеты показывают, что среднеквадратическое отклонение подвижного объекта от заданного направления при его движении в рассмотренных условиях с использованием предлагаемой системы управления может быть снижено на 40-100%.
Возможность изготовления предложенной системы не вызывает сомнений, так как введенные элементы изготавливаются серийно и находят широкое применение как в хозяйстве, так и на объектах военной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2002 |
|
RU2210715C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2003 |
|
RU2235270C1 |
| УСТРОЙСТВО ДЛЯ ВИЗИРОВАНИЯ | 2002 |
|
RU2207484C1 |
| УСТРОЙСТВО ДЛЯ ВИЗИРОВАНИЯ | 2001 |
|
RU2207483C1 |
| УСТРОЙСТВО ДЛЯ ВИЗИРОВАНИЯ | 2001 |
|
RU2204104C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2213926C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2192603C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2213318C1 |
| СПОСОБ УПРАВЛЕНИЯ СТРЕЛЬБОЙ ИЗ ПУШКИ УПРАВЛЯЕМЫМ СНАРЯДОМ | 2007 |
|
RU2343392C1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТАНКА В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2000 |
|
RU2181870C2 |
Изобретение относится к военной технике, а более конкретно - к системам управления подвижных объектов. Система управления содержит последовательно соединенные привод, визирное устройство, съюстированный с ним координатор, блок выработки управляющих сигналов, сумматор, блок выработки управляющих команд, линию связи, аппаратуру управления подвижным объектом с маркером. Система управления также содержит последовательно соединенные ключ, датчик скорости воздушного потока, кинематически связанный с визирным устройством, функциональный блок, масштабирующий блок и инвертор, выход которого соединен с вторым входом сумматора. Технический результат - повышение точности управления подвижными объектами в условиях действия на них значительных возмущений (воздушных потоков). 1 ил.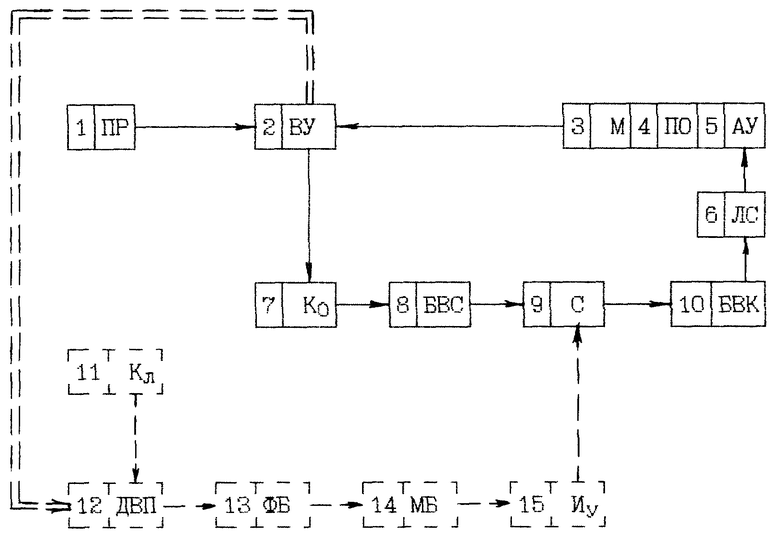
Система управления, содержащая последовательно соединенные привод, визирное устройство, съюстированный с ним координатор, блок выработки управляющих сигналов, блок выработки управляющих команд, линию связи, аппаратуру управления подвижным объектом с маркером, отличающаяся тем, что в нее введены сумматор, включенный между блоком выработки управляющих сигналов и блоком выработки управляющих команд, а также последовательно соединенные ключ, датчик скорости воздушного потока, кинематически связанный с визирным устройством, функциональный блок, масштабирующий блок и инвертор, выход которого соединен с вторым входом сумматора.
| ЛАТУХИН А.Н | |||
| Противотанковое вооружение | |||
| - М.: Воениздат, 1974, с.225 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ | 1994 |
|
RU2107879C1 |
| ЭЛЕКТРОННАЯ ГАЗОРАЗРЯДНАЯ ПУШКА С ХОЛОДНЫМ КАТОДОМ | 1966 |
|
SU222571A1 |
| DE 3230019 A1, 16.02.1984 | |||
| US 4641801, 10.02.1987. | |||
