Изобретение относится к авиационной технике, в частности к летательным аппаратам вертикального взлета и посадки.
Известен летательный аппарат типа "летающей тарелки" по патенту США N 778128, МКИ4 B 64 C 39/06, публ. 18.10.1988, т. 1095, N 3, "Изобретения стран мира", выпуск 48, N 7, включающий осесимметричный круглой формы каркас, заключенный в корпус, внутри которого смонтированы кабина, силовой нагнетатель с общей камерой под рабочую текучую среду, щелевые сопла и систему управления.
В отличие от заявляемого в приведенном летательном аппарате корпус имеет куполообразную форму, а нагнетатель текучей среды выполнен в виде соосного диска, приводимого в действие системой двигателей. Подъемная сила в приведенном летательном аппарате создается за счет разницы давлений рабочей среды над аппаратом и под аппаратом, путем омывания аэродинамической поверхности куполообразного корпуса струями сжатого воздуха.
Недостатки приведенного аппарата составляют низкая грузоподъемность аппарата вследствие низкого КПД сжатого воздуха, т.е. рабочей текучей среды, из-за куполообразной формы корпуса и самого принципа создания подъемной силы. Куполообразная форма корпуса имеет ограничения по геометрическим параметрам, так как с увеличением параметров значительно возрастает лобовое и донное сопротивление, присущее таким формам корпуса. Это приводит к большим потерям энергии текучей среды и к уменьшению ее КПД. Низкая маневренность аппарата обусловлена тем, что для управления аппаратом используются находящиеся в потоке аэродинамические рули, посредством которых осуществляют отклонение вектора тяги. При таком управлении вектор подъемной силы остается вертикально направленным и не участвует в изменении траектории полета.
Наиболее близким по технической сущности и принятый за прототип является летательный аппарат типа "летающей тарелки" VZ-9V "АВРОКАР" фирмы "Канадиен Авро", издание "Мир", Москва, 1991, П. Бауэрс, содержащий осесимметричный круглой формы корпус с органами управления аппаратом, кинематически связанных проводками с элементами регулировки, силовые нагнетатели, генерирующие поток рабочей текучей среды в воздухозаборник, сообщенный через отсекатель потока с общей кольцевой камерой, щелевые сопла, посадочное приспособление и грузовой отсек.
В приведенном летательном аппарате подъемная сила создается реактивной струей посредством трех двигателей. Горизонтальное перемещение аппарата после вертикального валета и набора высоты также обеспечивается отклонением вектора тяги, что обуславливает его низкую маневренность и устойчивость.
Относительно низкая грузоподъемность обусловлена низким КПД рабочей текучей среды. Увеличение грузоподъемности приводит к нерациональному увеличению количества двигателей и соответственно габаритов, т.к. грузоподъемность в приведенном аппарате прямо пропорциональна количеству двигателей.
В основу изобретения поставлена задача усовершенствовать летательный аппарат типа "летающей тарелки" путем введения новых конструктивных элементов, изменения особенностей конструктивного выполнения и новой взаимосвязи между ними, обеспечить перераспределение потока текучей среды в функции управляющих воздействий аппарат и за счет этого повысить КПД рабочей текучей среды, увеличить грузоподъемность аппарата, обеспечить его безопасность и маневренность.
Поставленная задача решается тем, что в летательном аппарате типа "летающей тарелки", включающем осесимметричный круглой формы корпус, кабину с органами управления аппаратом, кинематически связанных проводками с элементами регулировки, силовые нагнетатели рабочей текучей среды с воздухозаборником, сообщенный через отсекатель потока с общей кольцевой камерой, щелевые сопла, посадочное приспособление и грузовой отсек, согласно изобретению несущий диск выполнен в виде многоступенчатой силовой фермы и образован секторными наборами, выполненные в виде n-последовательно размещенных в вертикальной плоскости радиальных трубопроводов, каждый из которых сообщен с тандемно размещенными вдоль него на равном расстоянии друг от друга горизонтальными трубопроводами со щелевыми, с нижней стороны, соплами, а в кольцевой камере выполнены отверстия, одни из которых сообщены с полостью радиальных трубопроводов, а другие - с атмосферой через элементы регулировки, кинематически связанные с органами управления аппаратом, причем горизонтальные трубопроводы четных радиальных трубопроводов размещены со смещением относительно горизонтальных трубопроводов нечетных радиальных трубопроводов.
Секторные наборы выполнены составными, а кольцевая камера размещена между составными частями секторных наборов.
Трубопроводы со щелевыми соплами имеют переменное сечение, уменьшающееся в сторону щелевых сопел.
Регулируемые элементы выполнены в виде заслонок, кинематически связанные проводками с органами управления аппаратом.
Горизонтальные трубопроводы четных трубопроводов смещены на величину, равной половине расстояния между ними.
Конструктивное решение корпуса в виде многоступенчатой силовой фермы из набора трубопроводов, сообщенных с кольцевой камерой, позволило придать ему новое свойство, заключающееся в возможности многоступенчатого ускорения потока текучей среды, что позволило значительно повысить КПД энергии текучей рабочей среды, генерируемой силовыми нагнетателями, и расширить возможности управления аппаратом. Это позволило создать летательный аппарат, отличающийся высокой грузоподъемностью и маневренностью.
Сущность изобретения поясняется чертежами, где на:
фиг. 1 - общий вид летательного аппарата в сечении по A-A;
фиг. 2 - общий вид летательного аппарата;
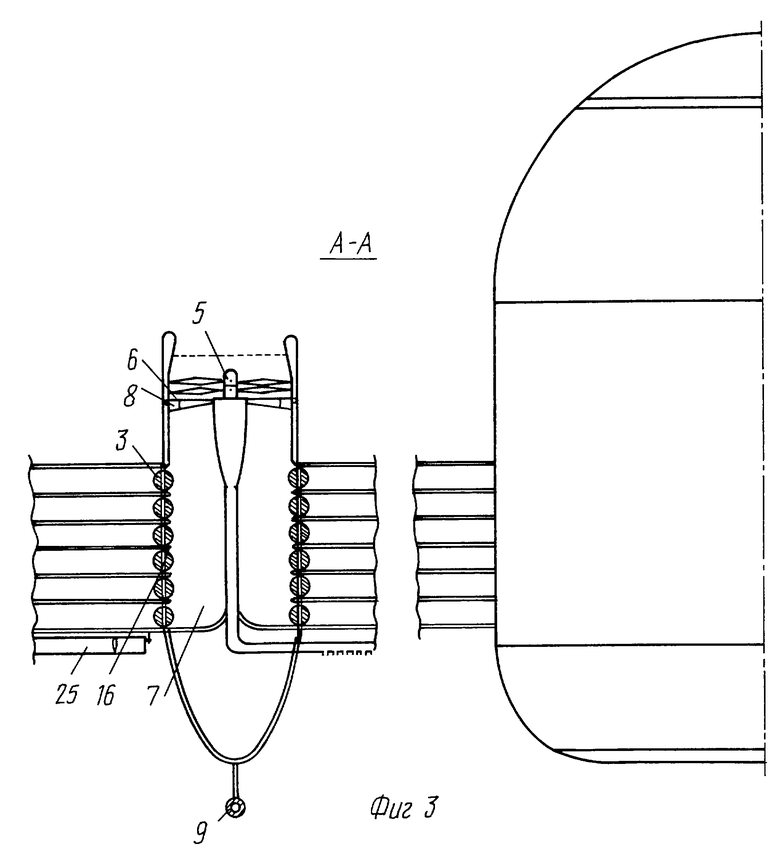
фиг. 3 - общий вид летательного аппарата в сечении по A-A (в М 1:6);
фиг. 4 - общий вид летательного аппарата в сечении по B-B (в М 1:6);
фиг. 5 - секторный набор силовой фермы летательного аппарата;
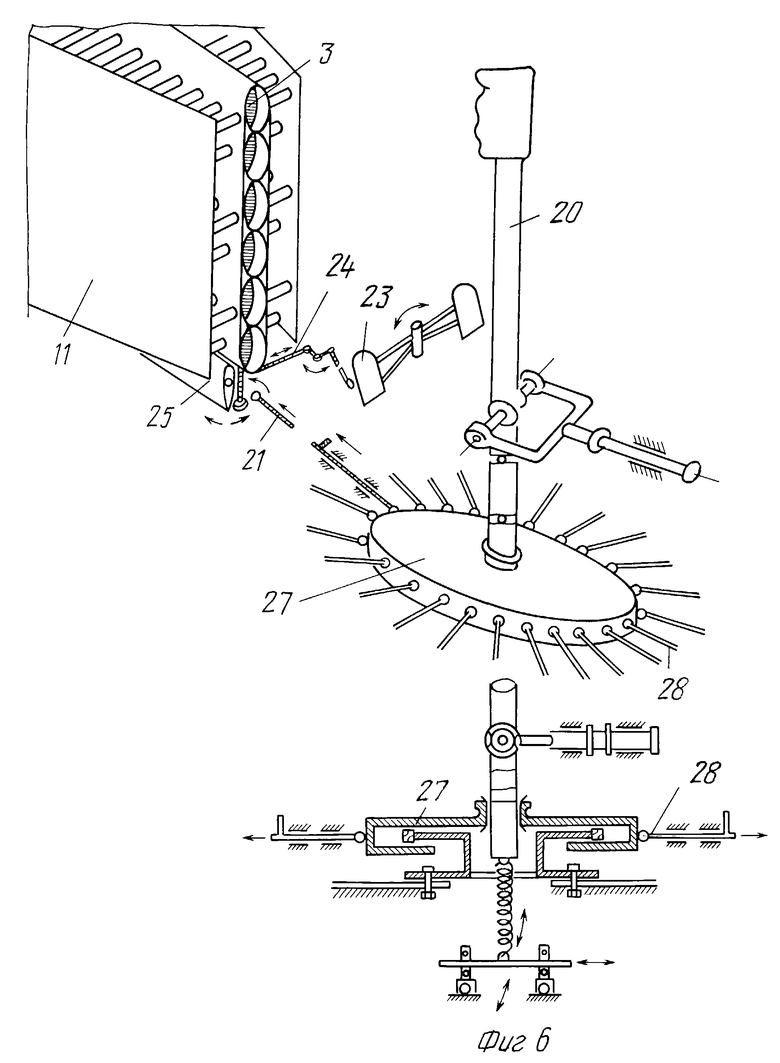
фиг. 6 - органы управления летательным аппаратом;
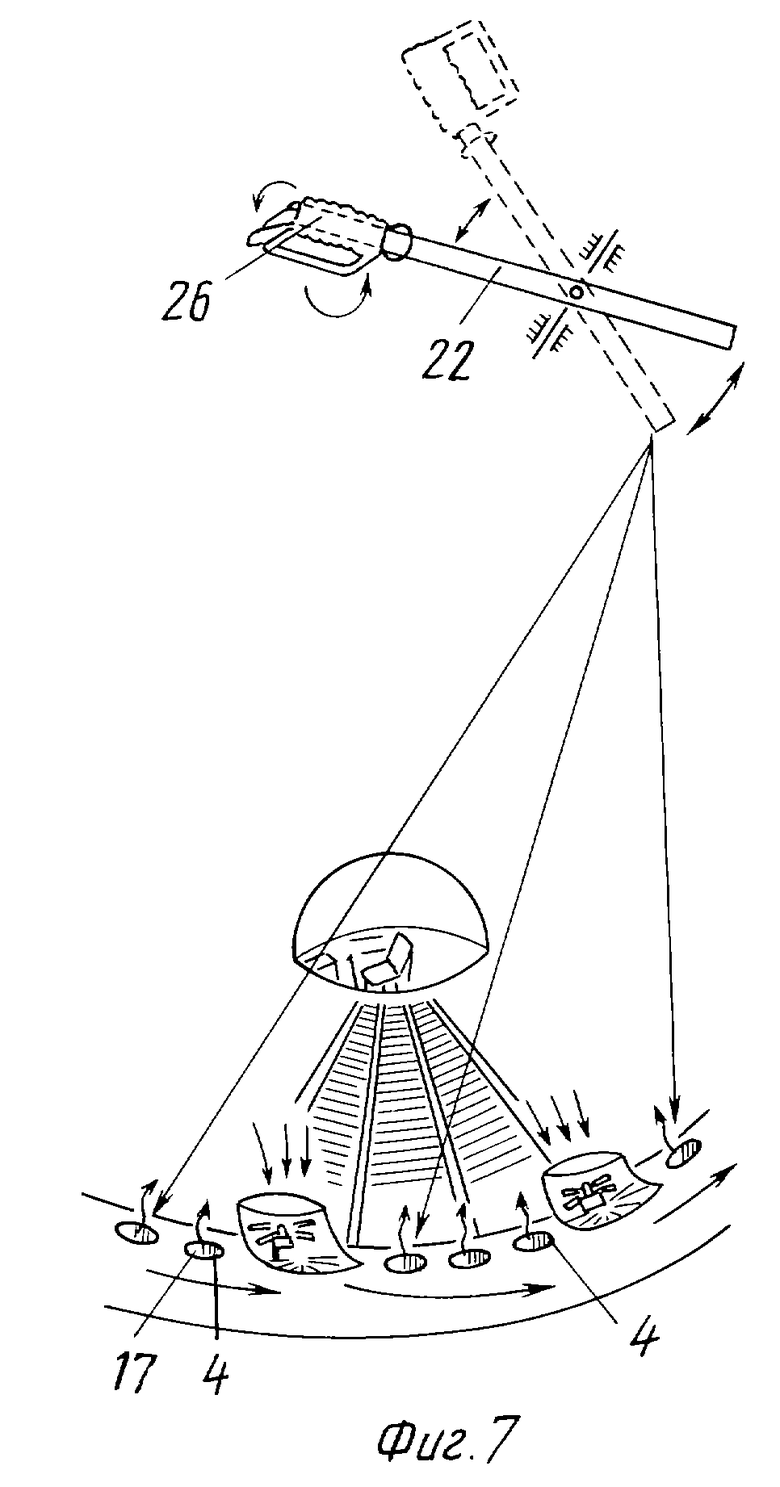
фиг. 7 - органы управления летательным аппаратом;
фиг. 8 - схема распределения текучей среды в силовой ферме.
Летательный аппарат типа "летающей тарелки", содержит осесимметричный круглой формы корпус 1, кабину 2, с органами управления аппаратом, кинематически связанных проводками с элементами регулировки 3, 4, силовые нагнетатели 5, генерирующие поток рабочей текучей среды в воздухозаборник 6, сообщенный с кольцевой камерой 7, через отсекатель потока 8, посадочное приспособление 9 и грузовой отсек 10.
Корпус 1 выполнен в виде многоступенчатой силовой фермы по форме диска и образован секторными наборами 11, выполненные в виде n-последовательно размещенных в вертикальной плоскости радиальных трубопроводов 12, каждый из которых сообщен с тандемно размещенными вдоль него на равном расстоянии друг от друга горизонтальными трубопроводами 13, 14 со щелевыми, с нижней стороны соплами 15.
В кольцевой камере 7 выполнены отверстия 16 и перепускные окна 17. Отверстия 16 сообщены с полостью радиальных трубопроводов 12 через заслонки 3. Перепускные окна 17 сообщены с атмосферой через заслонки 4. Горизонтальные трубопроводы 13, 14 четных радиальных трубопроводов размещены со смещением относительно горизонтальных трубопроводов нечетных радиальных трубопроводов на величину, равной половине расстояния (l) между ними.
Горизонтальные трубопроводы 13, 14 имеют переменное сечение, уменьшающееся в сторону щелевых сопел 15, что позволяет создать промежуток между ними по форме диффузора, эжектора, т.е. эжекторный промежуток, обеспечивающий ускорение проходящего через него потока среды.
Секторные наборы 11 выполнены составными и содержат части 18, 19, между которыми размещена кольцевая камера 7. Горизонтальные трубопроводы 13, 14 имеют переменное сечение, уменьшающееся в сторону щелевых сопел 15. Грузовой отсек 10 размещен по периметру силовой фермы.
Органы управления аппаратом содержат ручку управления по тангажу и крену 20, кинематически связанную с проводками 21 с заслонками 3, ручку управления подъемной силой 22, кинематически связанную с заслонками 4. Педали 23 кинематически связаны проводками 24 с элеронами 25 и рукоятку управления режимом силовых нагнетателей 26.
Кинематическая связь ручки управления по тангажу и крену 20 содержит соосно установленный на ручке 20 диск 27, концентрично которому, с возможностью взаимодействия с его боковой поверхностью, установлены подвижные толкатели 28, связанные проводкой 21 с заслонками 3.
Летательный аппарат работает следующим образом.
Перед запуском силовых нагнетателей 5 ручка управления по тангажу и крену 20 находится в нейтральном положении. Ручка управления подъемной силой 22 находится в крайнем нижнем положении. Заслонки 3, 4 открыты, т.е. угол их открытия максимален. Рукоятка управления режимом работы силовых нагнетателей 26 находится в положении "Малый газ". Отсекатель потока 8 в закрытом положении. Осуществляют запуск всех силовых нагнетателей 5, генерирующие поток рабочей текучей среды в воздухозаборник 6. Рукоятка управления режимом силовых нагнетателей 26 в положении "Малый газ". Под давлением потока текучей среды отсекатель потока 8 открывается и поток нагнетается в кольцевую камеру 7, из которой поток текучей среды через открытые перепускные окна 17 сбрасывается в атмосферу и частично выходит через открытые отверстия 16, поступает в радиальные трубопроводы 12 и горизонтальные 13, 14 и выходит через щелевые сопла 15.
Перед взлетом поворотом рукоятки управления режимом силовых нагнетателей в сторону увеличения газа переводят силовые нагнетатели 5 во взлетный режим. После чего плавным переводом ручки управления величиной подъемной силы 22 в крайнее верхнее положение постепенно уменьшают угол закрытия заслонок 4 и постепенно перекрывают перепускные окна 17, сообщающие кольцевую камеру 7 с атмосферой.
Таким образом, уменьшают сброс рабочей текучей среды в атмосферу и увеличивают ее подачу в радиальные трубопроводы 12 и к щелевым соплам 15. При выходе из щелевых сопел 15 струя рабочей текучей среды засасывает воздух из области над аппаратом и последовательно устремляет его в эжекторные промежутки многоступенчатой фермы. В результате подъемная сила летательного аппарата будет складываться из суммы реактивных составляющих потока текучей среды всех сопел и ускоренного подсасываемого воздуха из области над аппаратом. Это позволяет значительно увеличить подъемную силу аппарата и равномерно распределить ее по всей поверхности аппарата. При достижении величины подъемной силы, превышающей вес аппарата, начинается его плавный подъем вверх. Так как ручка управления по тангажу и крену 20 в нейтральном положении, заслонки 3 максимально открыты, подъемная сила во всех секторных наборах одинакова, точка приложения результирующей подъемной силы находится в центре тяжести аппарата, кренящие моменты отсутствуют. Благодаря тому, что корпус выполнен в виде силовой фермы, каждый ее конструктивный элемент участвует в создании подъемной силы, достигнуто равномерное ее перераспределение по всей рабочей поверхности диска, что позволило значительно увеличить грузоподъемность аппарата. После набора высоты аппарат выводят в режим горизонтального полета. Для чего отклонением ручки управления по тангажу и крену 20 воздействуют через диск 27 на группу толкателей 28, которые через проводки 21 изменяют угол открытия группы заслонок 3 и уменьшают поток текучей среды в радиальные трубопроводы 12 группы заданных секторных наборов и, как следствие, подъемную силу. Точка приложения результирующей подъемной силы смещается от центра тяжести, появляется кренящий момент. Величина угла открытия заслонок 3 зависит от угла наклона ручки управления аппаратом, что в свою очередь влияет на величину кренящего момента и, как следствие, на скорость накренения аппарата.
Парирование кренения аппарата осуществляется обратным движением ручки 20 от нейтрального положения. Таким образом, осуществляют фиксацию аппарата под определенным углом к горизонтали и создают вектор горизонтальной составляющей подъемной силы, которая разгоняет аппарат в горизонтальном направлении. При этом вертикальная составляющая подъемной силы становится меньше вектора силы тяжести. Для чего отклонением ручки управления подъемной силы 22 угол открытия заслонок 4 в сторону уменьшения увеличивают поток рабочей текучей среды и соответственно величину подъемной силы.
Посадка летательного аппарата осуществляется на повышенном режиме силовых нагнетателей. Плавным отклонением ручки управления величиной подъемной силы 22 приоткрывают заслонки 4, т.е. увеличивают их угол открытия, избыток потока текучей среды сбрасывается через перепускные окна 17 в атмосферу. Подъемная сила уменьшается, и аппарат идет на снижение.
Горизонтальное положение аппарата удерживается малыми отклонениями ручки управления по тангажу и крену 20.
Путевой момент аппарату создают посредством педалей 23, воздействующих на элероны 25.
Согласно заявляемому аппарату изготовлен макет и испытан. В результате испытаний установлено, что заявляемое техническое решение позволило создать надежный и удобный в эксплуатации аппарат с повышенной грузоподъемностью и маневренностью.
Конструктивное решение корпуса и системы распределения текучей среды в аппарате и позволяет осуществлять перевозки тяжелых негабаритных грузов.




Изобретение относится к авиационной технике, в частности к летательным аппаратам вертикального взлета и посадки. Задача: усовершенствовать летательный аппарат типа "летающей тарелки" путем введения новых конструктивных элементов, изменения особенностей конструктивного выполнения и новой взаимосвязи между ними. Сущность: аппарат включает осесимметричный круглой формы корпус, кабину с органами управления аппаратом, кинематически связанных проводками с элементами регулировки, силовые нагнетатели рабочей текучей среды с воздухозаборником, сообщенным через отсекатель потока с общей кольцевой камерой, щелевые сопла, посадочное приспособление и грузовой отсек. Корпус выполнен в виде многоступенчатой силовой фермы и образован секторными наборами, выполненными в виде n-последовательно размещенных в вертикальной плоскости радиальных трубопроводов, каждый из которых сообщен с тандемно размещенными вдоль него на равном расстоянии друг от друга горизонтальными трубопроводами со щелевыми с нижней стороны соплами. В кольцевой камере выполнены отверстия, одни из которых сообщены с полостью радиальных трубопроводов, а другие - с атмосферой через элементы регулировки. Горизонтальные трубопроводы четных радиальных трубопроводов размещены со смещением относительно нечетных радиальных горизонтальных трубопроводов. Секторные наборы выполнены составными, а кольцевая камера размещена между составными частями секторных наборов. Регулируемые элементы выполнены в виде заслонок, кинематически связанных проводками с органами управления аппаратом. Изобретение направлено на повышение грузоподъемности, обеспечение безопасности и маневренности. 4 з.п. ф-лы, 8 ил.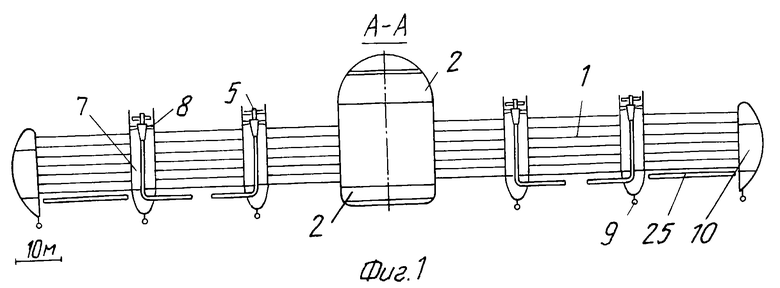
| Баурс П | |||
| Летательные аппараты нетрадиционных схем | |||
| - М.: Мир, 1991, с.314-316 | |||
| Летательный аппарат | 1990 |
|
SU1838180A3 |
| US 3469802 A, 30.09.1969 | |||
| US 4566699 A, 28.01.1986 | |||
| US 5064143 A, 12.11.1991 | |||
| DE 4131569 A1, 25.03.1993 | |||
| Шланговое соединение | 0 |
|
SU88A1 |

