ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к авиационной технике, в частности, к беспилотным летательным аппаратам вертикального взлета и посадки.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известен беспилотный летательный аппарат вертикального взлета и посадки (RU 2716391, 2017). Известный беспилотный летательный аппарат вертикального взлета и посадки (далее БПЛА) выполнен по аэродинамической схеме «тандем» и содержит фюзеляж, с неподвижными передним и задним крыльями обратной стреловидности. На консолях крыльев расположены четыре подъемные винтомоторные группы, размещенные симметрично относительно центра масс и содержащие электромоторы и наружные однолопастные профилированные винты, закрепленные на электромоторах в горизонтальных шарнирах с возможностью самоориентирования лопастей по набегающему потоку. Аппарат также содержит маршевую винтомоторную группу, выполненную толкающей, с размещением в задней части фюзеляжа. БПЛА содержит гибридную силовую установку, включающую двигатель внутреннего сгорания с генератором, электрически связанным с электромоторами винтомоторных групп. Основным недостатком известного БПЛА является способ создания вертикальной тяги за счет тяги подъемных винтомоторных групп. Данный способ чрезвычайно энергозатратен. Увеличение энергозатрат связано с раздельным приводом режима вертикального взлета и посадки и маршевого режима полета. Применение гибридной силовой установки также снижает энергетическую эффективность, увеличивает массу БЛА.
Из уровня техники известен беспилотный летательный аппарат вертикального взлета и посадки (RU 2726217, 2020). Изобретение направлено на увеличение подъемной силы коптера. Способ увеличения подъемной силы коптера вертикального взлета и посадки с открытыми винтами включает закрепление на коптере аэродинамического экрана с отверстиями для вращающихся воздушных винтов в непосредственной близости от этих винтов в плоскости, параллельной плоскости вращения воздушных винтов коптера. Во время вращения воздушных винтов над поверхностью аэродинамического экрана создаются воздушные потоки, направленные к оси вращения воздушных винтов, которые создают область пониженного давления над верхней поверхностью аэродинамического экрана. Таким образом обеспечивается создание дополнительной подъемной силы коптера. Основным недостатком способа является низкая эффективность. Незначительный прирост подъемной силы наблюдается в лабораторных условиях только на режиме вертикального взлета. Это объясняется небольшой площадью поверхности, над которой создается разрежение. При горизонтальном движении коптера наличие эффекта зависит от угла атаки экрана. Предлагаемый способ увеличения подъемной силы не имеет промышленного применения.
Наиболее близким к предлагаемому техническому решению является конструкция самолета вертикального взлета и посадки (RU 2752276, 2021, Битуев АГ).
Известный самолет содержит фюзеляж, в носовой и хвостовой части которого расположена несущая система, а в средней части кабина экипажа и моторно-трансмиссионный отдел. Несущая система состоит из установленных передней кромкой друг к другу, параллельно и симметрично относительно продольной оси самолета крыльев, закрытых с концов обтекателями. Крылья обтекаются воздушным потоком вентиляторов в направлении от фюзеляжа в стороны. Посередине между вентиляторами в пространстве между стенками воздуховодов установлены моторы, валы которых соединены с крыльями. Моторы выполнены с возможностью поворачивать крылья относительно оси валов таким образом, что в одном из положений крылья наклонены вперед, а в другом из положений наклонены назад. При наклоне крыльев вперед или назад самолету сообщается горизонтальная скорость направленная вперед или назад. Управление самолетом на всех режимах полета осуществляется струйными рулями. Достоинством известного технического решения является большая грузоподъемность и экономичность несущей системы. СВВП может применяться с площадок ограниченных размеров, в условиях плотной городской застройки в качестве летающего такси, медицинского, патрульного, спасательного летательного аппарата.
Несущую систему вышеописанного самолета возможно применить в конструкции беспилотного летательного аппарата вертикального взлета и посадки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической задачей изобретения является повышение грузоподъемности, экономичности и увеличение продолжительности полета беспилотного летательного аппарата. Поставленная задача решена благодаря тому, что предлагаемый беспилотный летательный аппарат вертикального взлета и посадки, содержит в себе:
фюзеляж (1), имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними,
электрические двигатели (6) с приводными валами (7), расположенные в средней части фюзеляжа,
приводные валы (7) кинематически соединенные с осями вентиляторов (4) через редукторы (8),
вентиляторы (4), установленные в средней части фюзеляжа (1) таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны,
крылья (2) закрытые с концов обтекателями (3), выполненные таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны, систему связи и бортовую аппаратуру управления (12) расположенную в носовой части фюзеляжа,
компрессор (10) с ресивером (11) расположенный в хвостовой части фюзеляжа, выполненный с возможностью подачи сжатого воздуха к соплам системы управления (18), установленным на штангах (17),
сопла системы управления (18) выполненные с возможностью управления по тангажу, рысканию и крену на всех режимах полета,
заслонки (14), установленные в корпусах (13), расположенных под задней кромкой крыльев (2) и соединенные с устройствами привода заслонок (16),
устройства привода заслонок (16), выполненные с возможностью поворота заслонок (14) относительно оси (15) таким образом, что в одном из положений заслонки наклонены вперед, а в другом из положений наклонены назад,
аккумулятор (9), расположенный в средней части фюзеляжа.
По сути, поставленная задача достигается следующим образом: самолет вертикального взлета и посадки, имеющий фюзеляж, крылья, вентиляторы, газотурбинный двигатель отличается тем, что привод вентиляторов осуществляется от электрических двигателей подключенных к аккумулятору, а под задней кромкой крыльев установлены заслонки, имеющие возможность отклонять воздушный поток вентиляторов вперед и назад. В предпочтительных формах воплощения вышеописанного беспилотного летательного аппарата:
- компрессор (10) выполнен поршневым.
- компрессор (10) выполнен центробежным.
- на крыльях (2) установлены перегородки (5).
Предлагаемое изобретение иллюстрируется чертежами.
КРАТКОЕ ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
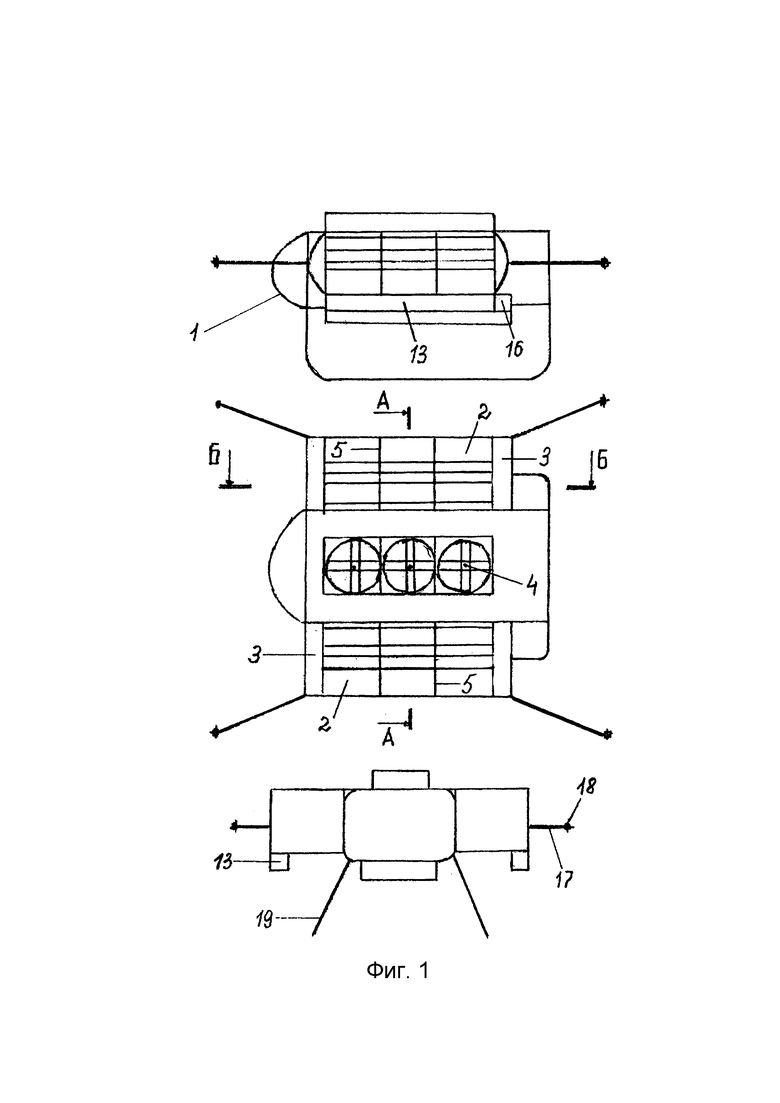
На Фиг. 1 представлен общий вид БПЛА в трех проекциях.
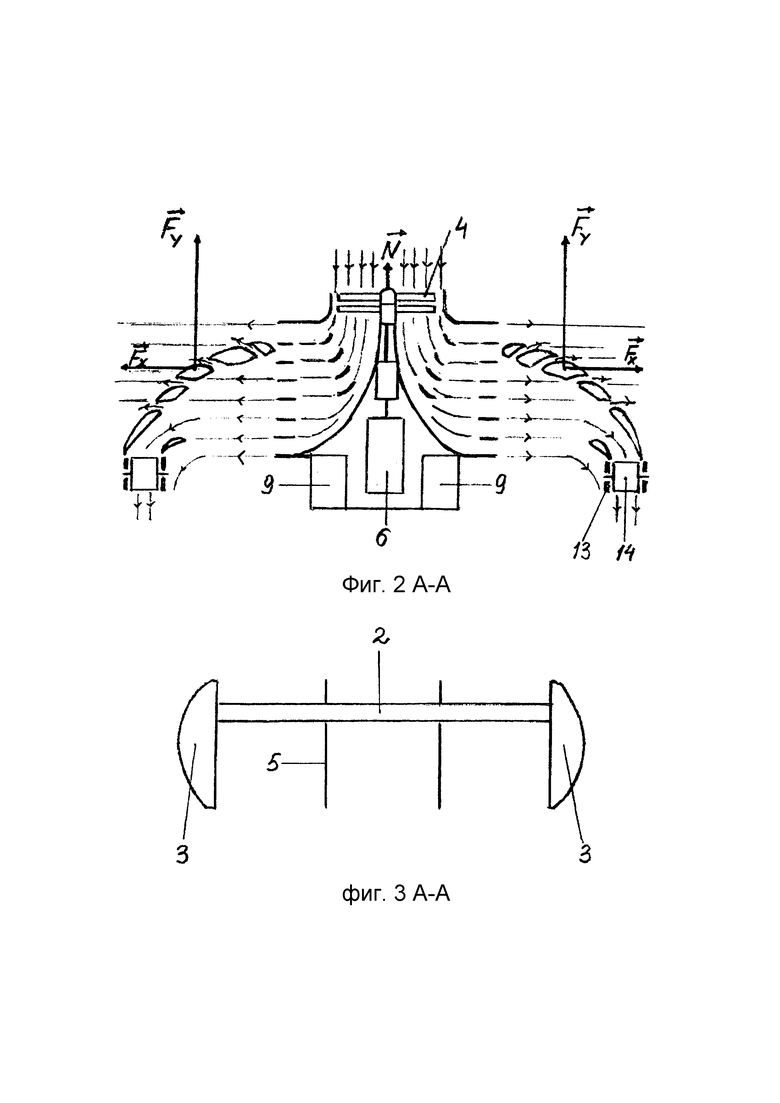
На Фиг. 2 показано сечение А-А.
На Фиг. 3 показано сечение Б-Б
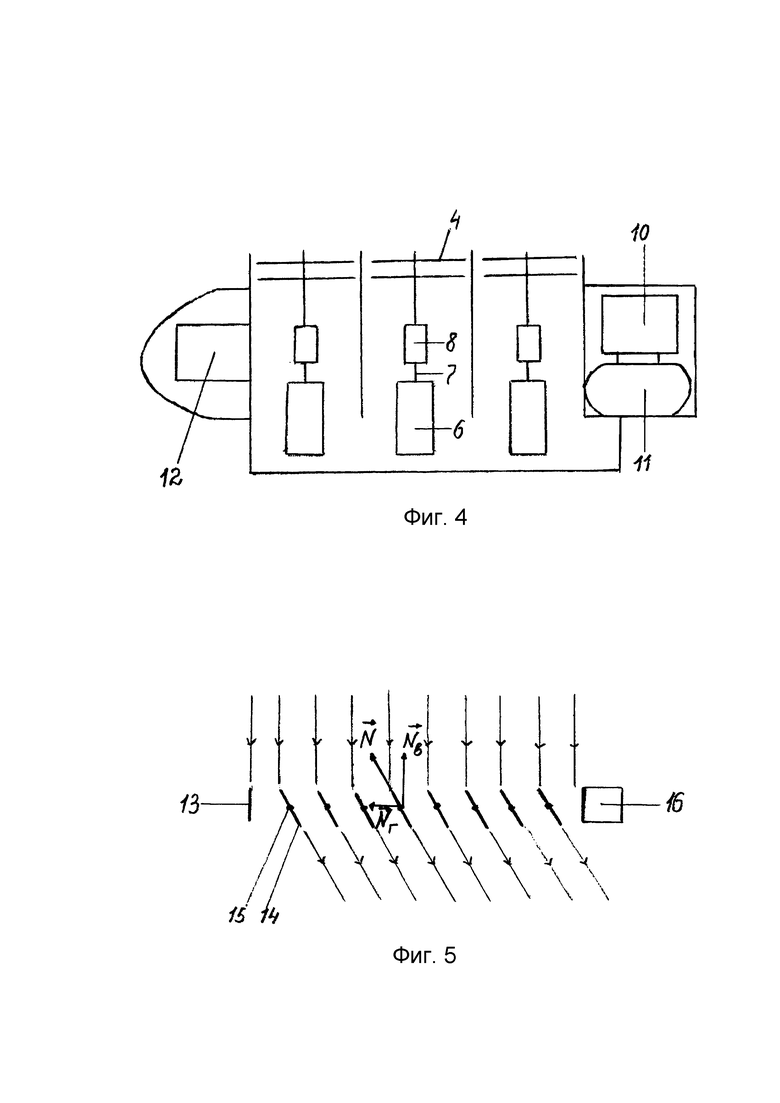
На Фиг. 4 изображена кинематическая схема
На Фиг. 5 показана схема создания горизонтальной тяги
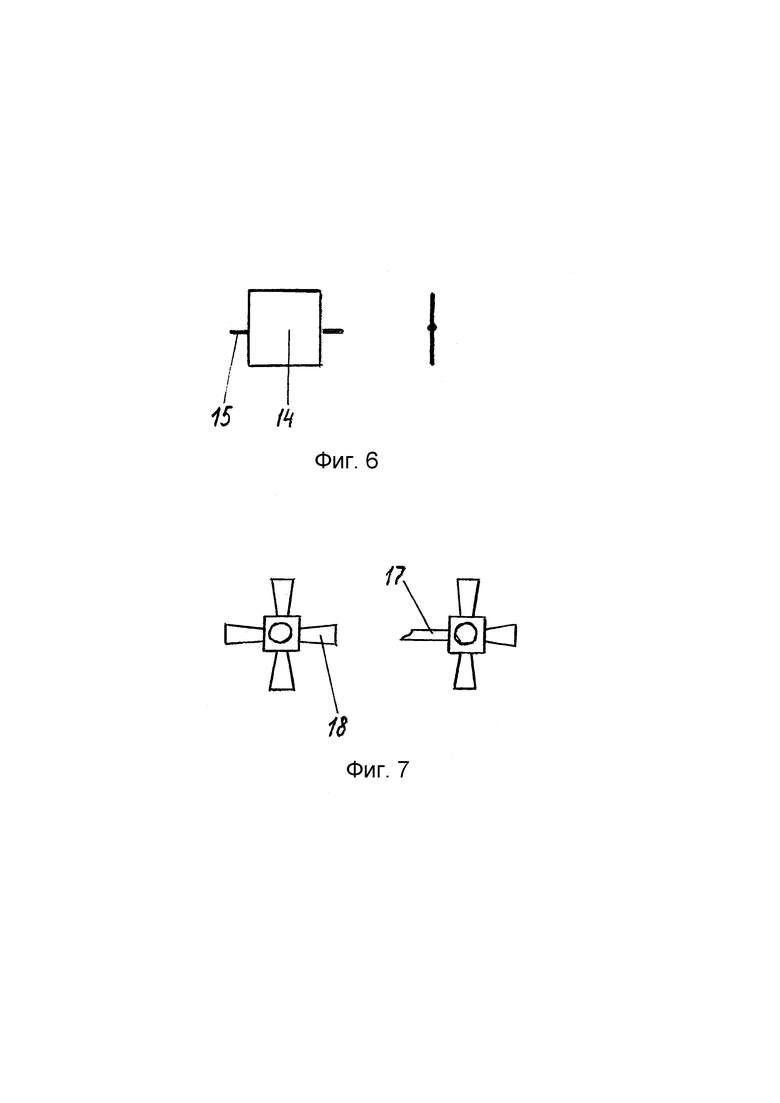
На Фиг. 6 показан вид заслонки в двух проекциях
На Фиг. 7 показаны сопла системы управления в двух проекциях
Позициями 1-19 обозначены:
1 - фюзеляж,
2 - крыло,
3 - обтекатель крыла,
4 - вентилятор,
5 - перегородка,
6 - электрический двигатель,
7 - приводной вал,
8 - редуктор,
9 - аккумулятор,
10 - компрессор,
11 - ресивер,
12 - система связи и бортовая аппаратура управления,
13 - корпус заслонок,
14 - заслонка,
15 - ось заслонки,
16 - устройство привода заслонок,
17 - штанга,
18 - сопло системы управления,
19 - шасси.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как показано на Фиг. 1 БПЛА содержит:
фюзеляж 1,
крылья 2,
обтекатели крыльев 3,
вентиляторы 4,
перегородки 5,
корпуса заслонок 13,
штанги 17,
сопла системы управления 18,
устройства привода заслонок 16
шасси 19.
Как показано на Фиг. 1 и Фиг. 2 по бокам в средней части фюзеляжа 1 передней кромкой друг к другу, параллельно и симметрично относительно продольной оси БПЛА установлены крылья 2 закрытые с концов обтекателями 3.
При этом кривизна аэродинамического профиля обеспечивает отклонение части воздушного потока вентиляторов вниз.
Как показано на Фиг. 3 воздушные потоки вентиляторов 4 разделены перегородками 5 Как показано на Фиг. 4 электрические двигатели 6 приводными валами 7 через редукторы 8 передают крутящий момент двухступенчатым вентиляторам с роторами противоположного вращения 4.
Как показано на Фиг. 5 под задней кромкой крыльев 2 установлены заслонки 14. Заслонки установлены с одинаковым шагом в корпусе 13 прямоугольной формы, открытому сверху и снизу. При этом заслонки 14 соединены с устройством привода 16. Устройство привода заслонок 16 выполнено с возможностью поворота заслонок 14 относительно оси 15 таким образом, что в одном из положений заслонки наклонены вперед, а в другом из положений наклонены назад.
Как показано на Фиг. 6 заслонка 14 с осью 15 имеет прямоугольную форму.
Как показано на Фиг. 7 сопла системы управления 18 и обеспечивающие управление по тангажу, рысканию и крену на всех режимах полета.
Вертикальный взлет осуществляется следующим образом:
1) после подачи электрической энергии от аккумулятора 9 электрическим двигателям 6 приводные валы 7 передают крутящий момент через редукторы 8 вентиляторам 4. Воздушный поток вентиляторов обтекая крылья 2 создает подъемную силу (Fy) и силу лобового сопротивления (Fx) и далее частично отклоняясь вниз создает силу тяги (N) (Фиг. 2). При этом отклоненный воздушный потока проходит через заслонки 14 установленные в корпусах 13. Исходное положение заслонок 14 вертикальное. (Фиг. 2, Фиг. 5)
2) как только вертикальная тяга, как сумма подъемных сил крыльев (Fy) и силы тяги вентиляторов (N), станет больше силы тяжести произойдет отрыв БПЛА от поверхности и начнется вертикальный взлет.
Осуществление крейсерского режима полета:
1) после набора определенной высоты устройства привода заслонок 16 синхронно наклоняют заслонки 14 на одинаковый угол вперед. При наклоне заслонок 14 вперед образуется горизонтальная составляющая (Nr) силы тяги вентиляторов (N) которая и сообщает БЛА горизонтальную скорость (Фиг. 5). При необходимости торможения, остановки и движения задним ходом заслонки 14 отклоняют назад. В режиме висения заслонки 14 находятся в вертикальном положении.
Вертикальная посадка осуществляется следующим образом:
1) При приближении к месту посадки устройства привода заслонок 16 синхронно наклоняют заслонки 14 на одинаковый угол назад. Образующаяся горизонтальная составляющая (Nr) силы тяги вентиляторов будет направлена в противоположную сторону движения БПЛА и следовательно снижать его скорость. Таким образом будет происходить торможение аппарата в воздухе до его полной остановки. После остановки аппарата заслонки 14 устройствами привода заслонок 16 переводятся в исходное (вертикальное) положение.
2) Плавное уменьшение оборотов двигателя позволяет осуществить вертикальную посадку на неубирающееся шасси 19.
На БПЛА используется система струйного (реактивного) управления. Она представляет собой несколько воздушных сопел системы управления 18 объединенных в блок и расположенных на штангах 17 установленных попарно по бокам фюзеляжа. (Фиг. 7) Сжатый воздух к соплам системы управления 18 поступает от компрессора 10 с ресивером 11 по трубопроводам. Привод компрессора электрический. Система струйного (реактивного) управления обеспечивает управление по тангажу, рысканию и крену на всех режимах полета.
Таким образом, при расположении в воздушном потоке вентиляторов крыльев, передней кромкой друг к другу, параллельно и симметрично относительно продольной оси самолета векторная сумма сил лобового сопротивления становится равной нулю. Это дает возможность применения аэродинамических профилей с наибольшим коэффициентом подъемной силы (Су) без учета их коэффициента лобового сопротивления (Сх).
Для повышения коэффициента подъемной силы возможно применение системы управления пограничным слоем (сдув).
Реализация вышеперечисленных мероприятий, направленных на повышение коэффициента подъемной силы, позволяет значительно увеличить подъемную силу (при прочих равных условиях) при минимальных энергозатратах и следовательно повысить грузоподъемность и экономичность беспилотного летательного аппарата. Расположение крыльев вдоль по бокам фюзеляжа значительно снижает лобовое сопротивление крыльев набегающему воздушному потоку при движении аппарата, повышая тем самым его экономичность.
Установка под задней кромкой крыльев заслонок, имеющих возможность отклонять воздушный поток вентиляторов позволяют беспилотному летательному аппарату осуществлять движение вперед и назад без дополнительных энергозатрат.
Повышение экономичности БЛА позволяет существенно увеличить продолжительность полета.
Применении струйных рулей позволяют БЛА выполнять вращения вокруг вертикальной оси, парировать внешние воздействия (порыв ветра), а также управление по тангажу, рысканию и крену.
Отсутствие вынесенных винтомоторных групп снижает радиолокационную и акустическую заметность, повышает живучесть БПЛА.
При выходе из строя или повреждении одного из электрических двигателей/вентилятора исправные двигатели индивидуально переходят на режим повышенной мощности, что позволяет аппарату продолжить полет и вернуться на базу.
Предлагаемый летательный аппарат может применяться как БПЛА малого радиуса действия (масса 5-50 кг, дальность действия 10-70 км.) в разведывательных и ударных целях.
Аппарат также может найти применение в различных целях в гражданской сфере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2824222C1 |
| Устройство для удаления сосулек | 2024 |
|
RU2829606C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2805891C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2024 |
|
RU2826651C1 |
| Самолёт вертикального взлёта и посадки | 2021 |
|
RU2752276C1 |
| Самолёт вертикального взлёта и посадки | 2022 |
|
RU2788231C1 |
| Экраноплан | 2021 |
|
RU2766020C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГОГО ВЗЛЁТА И ПОСАДКИ | 2020 |
|
RU2736793C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЭВАКУАЦИИ РАНЕНЫХ И ПОРАЖЕННЫХ | 2023 |
|
RU2829664C1 |
| МУЛЬТИРОТОРНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2024 |
|
RU2826663C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Беспилотный летательный аппарат вертикального взлета и посадки содержит фюзеляж (1), имеющий носовую, хвостовую и среднюю части, электрические двигатели (6) с приводными валами (7), расположенные в средней части фюзеляжа. Приводные валы (7) кинематически соединены с осями вентиляторов (4) через редукторы (8). Вентиляторы (4) установлены в средней части фюзеляжа (1) таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны. Крылья (2) закрыты с концов обтекателями (3) и выполнены таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны. Компрессор (10) с ресивером (11) расположены в хвостовой части фюзеляжа и выполнены с возможностью подачи сжатого воздуха к соплам системы управления (18), установленным на штангах (17). Сопла системы управления (18) выполнены с возможностью управления по тангажу, рысканию и крену на всех режимах полета. Обеспечивается повышение грузоподъемности, экономичности и увеличение продолжительности полета беспилотного летательного аппарата. 3 з.п. ф-лы, 7 ил.
1. Беспилотный летательный аппарат вертикального взлета и посадки, содержащий в себе: фюзеляж (1), имеющий носовую часть, хвостовую часть и среднюю часть, расположенную между ними,
электрические двигатели (б) с приводными валами (7), расположенные в средней части фюзеляжа,
приводные валы (7), кинематически соединенные с осями вентиляторов (4) через редукторы (8),
вентиляторы (4), установленные в средней части фюзеляжа (1) таким образом, что имеют возможность создавать поток текучей среды из отверстия в верхней части фюзеляжа в направлении от фюзеляжа в стороны,
крылья (2), закрытые с концов обтекателями (3), выполненные таким образом, что подъемная сила создается потоком текучей среды в направлении от фюзеляжа в стороны,
систему связи и бортовую аппаратуру управления (12), расположенную в носовой части фюзеляжа,
компрессор (10) с ресивером (11), расположенные в хвостовой части фюзеляжа, выполненные с возможностью подачи сжатого воздуха к соплам системы управления (18), установленным на штангах (17),
сопла системы управления (18), выполненные с возможностью управления по тангажу, рысканию и крену на всех режимах полета,
заслонки (14), установленные в корпусах (13), расположенных под задней кромкой крыльев (2), и соединенные с устройствами привода заслонок (16),
устройства привода заслонок (16), выполненные с возможностью поворота заслонок (14) относительно оси (15) таким образом, что в одном из положений заслонки наклонены вперед, а в другом положении наклонены назад,
аккумулятор (9), расположенный в средней части фюзеляжа.
2. Аппарат по п. 1, характеризующийся тем, что в нем компрессор (10) выполнен поршневым.
3. Аппарат по п. 1, характеризующийся тем, что в нем компрессор (10) выполнен центробежным.
4. Аппарат по п. 1, характеризующийся тем, что в плоскости сечения профиля крыла (2) перпендикулярно передней и задней кромкам установлены перегородки (5).
| Самолёт вертикального взлёта и посадки | 2021 |
|
RU2752276C1 |
| FR 3008383 A1, 16.01.2015 | |||
| US 9487286 B2, 08.11.2016 | |||
| САМОЛЕТ С УКОРОЧЕННЫМ ЛИБО ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2019 |
|
RU2712708C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ - "ДИСКОЛЕТ БЕЗРУКОВА-3" | 1999 |
|
RU2174484C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2524318C1 |
