Изобретение относится к медицинской технике, а именно к устройствам реабилитации опорно-двигательного аппарата космонавтов в условиях невесомости, и может быть использовано для повышения мышечного тонуса, вертикальной устойчивости, предотвращения мышечной атрофии и других двигательных отклонений путем воздействия на механорецепторы стоп и состояние периферической системы кровообращения ног.
Изобретение может быть использовано в профилактических и лечебных целях в период гиподинамии и при выполнении космических полетов.
Устройство может быть применено для реабилитации людей с малоподвижным образом профессиональной деятельности, например для летчиков, водителей, машинистов и др.
Основной причиной указанных нарушений является снижение опорных нагрузок и связанное с ним изменение притока афферентации, играющей важную роль в поддержании тонуса позной мускулатуры и, в частности, мышц голени и стопы. Дополнительным фактором, обуславливающим развитие двигательных нарушений, является изменение структуры и функций опорного аппарата стопы, связанное с уменьшением жесткости мускулатуры голени и стопы.
Известно устройство для воздействия на состояние периферической системы кровообращения и механорецепторов стоп ног, содержащее подметку, удлиненный и изогнутый выступ, расположенный рядом с основанием пальцев ноги, выступ, расположенный на арочной части и по центру ступни, и выступ, расположенный в месте, соответствующем центру пятки.
Каждый выступ содержит магнит, выступающий над поверхностью выступа. При этом давящие выступы и подметка выполнены как одно целое из синтетической смолы (мягкого и эластичного материала) для обеспечения эластичной деформации с подошвой ступни (Авторское свидетельство СССР N 638241, 1978).
Однако известное устройство является малоэффективным по своему воздействию на состояние периферической системы кровообращения ног в условиях невесомости. Его воздействие проявляется при ходьбе и беге.
Известно также устройство для терапевтического воздействия на нижние конечности, содержащее узел низа обуви, на внутренней поверхности которой выполнены давящие выступы в анатомически характерных точках. На давящих выступах в соответствующих полостях размещены магниты для контакта со стопой. Кроме того, устройство имеет средство для обеспечения продольных колебаний магнитов в своих полостях, выполненное в виде профилированной прокладки из ферромагнитного материала, на которой размещены обмотка намагничивания, соединенная с генератором переменного электрического сигнала (Авторское свидетельство СССР N 1299560, 1987).
Указанное устройство может быть использовано для реабилитации продолжительной малоподвижности, для обеспечения стимулирования анатомически характерных зон ступни. Однако это устройство не обеспечивает компенсации опорной разгрузки и не учитывает изменения опорных свойств стопы в патогенезе двигательных нарушений, обусловленных невесомостью; не обеспечивает профилактики вызванных невесомостью изменений структурно-функциональных свойств стопы и других двигательных нарушений.
Известно устройство для реабилитации опорно-двигательного аппарата пациентов с застоем венозной крови в нижних конечностях, содержащее манжету обжатия с секциями, патрубки, пневмораспределитель, состоящий из коммутатора и задатчика режима, ресивера (Авторское свидетельство СССР N 1811834, 30.04.93). К недостаткам этого устройства относится то, что оно не воздействует на стопу и не создает опорных нагрузок.
Наиболее близким аналогом предложенного устройства для реабилитации опорно-двигательного аппарата в условиях невесомости, содержащего два пневмоботинка, каждый из которых выполнен в виде подошвы с эластичным супинатором и манжетой обжатия, соединенной с источником давления, нагрузочные элементы, установленные в супинаторе (В кн. "Авиакосмическая медицина" И.Б.Козловская и др., Москва-Калуга 1979, ч.1 стр. 18).
Известное устройство предназначено для реабилитации опорно-двигательного аппарата космонавтов в условиях невесомости путем "некоторой" компенсации опорной разгрузки стоп ног. Однако известное устройство обладает недостаточными функциональными возможностями по оптимизации профилактического воздействия на механорецепторы стоп ног, а также на периферическое кровообращение конечностей.
Задачей настоящего изобретения является создание высокоэффективного устройства для реабилитации опорно-двигательного аппарата космонавтов в условиях невесомости путем оптимизированного воздействия на локальные зоны ступней ног с привлечением современных прецизионных электроннопневматических систем и, основываясь на изученных закономерностях механорецепторов стоп ног и периферического кровообращения конечностей.
Учитывая накопленный опыт использования пневмовоздействия на локальные зоны ступней ног, были выбраны основные принципы оптимизации воздействия на них.
1). Двухуровневый принцип.
Изменение любого одного параметра P+min (минимального уровня), P+mах (максимального уровня) давления приводит к неаддитивному реагированию механорецепторов ступней ног и кровообращения нижних конечностей.
2). Импульсный принцип.
При импульсном пневмовоздействии по сравнению с непрерывным в меньшей степени развивается адаптация.
3). Принцип на приращение воздействия.
Ученые пришли к заключению, что поведение полярной среды есть общий физический механизм действия механо-, термо-, фото-, электро- и хеморецепторов.
Полярная среда (пространственно-обособленные структуры специализированных высокочувствительных рецепторов телец Фатер-Пачини) обладает уникальным свойством - она реагирует только на приращение воздействия и не формирует "выходного" сигнала в случае стационарного воздействия, т.е. в соответствии с терминологией автоматических систем полярные рецепторы исключают избыточность информации уже на уровне первичных преобразователей (датчиков).
Поставленная задача оптимизации воздействия на локальные зоны ступней и на ступни ног в целом решена за счет того, что в устройство для реабилитации опорно-двигательного аппарата космонавтов в условиях невесомости, содержащее два пневмоботинка, каждый из которых выполнен в виде подошвы с эластичным супинатором и многокамерной манжеты обжатия, соединенной с источником давления, нагрузочные элементы, соединенные с источником давления ресиверы минимального и максимального давления, соединенные с датчиками давления, выходы которых соединены с микропроцессором, при этом нагрузочные элементы выполнены в виде трех пневмомодулей, два из которых расположены в носковой, а один расположен в пяточной частях супинатора в анатомически характерных зонах ступни, причем каждый пневмомодуль выполнен в виде пневмокапсулы, представляющей собой камеру с мембраной, поверхность которой расположена на одном уровне с поверхностью супинатора, и соединенной с ней электропневмопреобразователя, соединенного трубопроводами с ресиверами минимального и максимального давления и микропроцессором.
Каждая из манжет обжатия соединена с ресивером минимального давления.
Источник давления выполнен в виде миникомпрессора, соединенного с микропроцессором.
Устройство содержит сенсорную клавиатуру и жидкокристаллический дисплей, соединенные с микропроцессором.
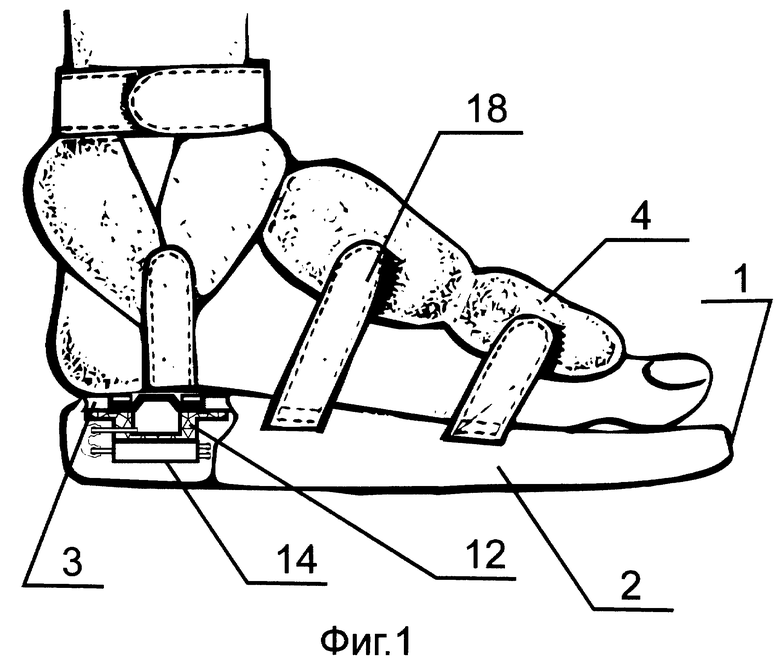
На фиг. 1 представлен внешний вид пневмоботинка (вид сбоку).
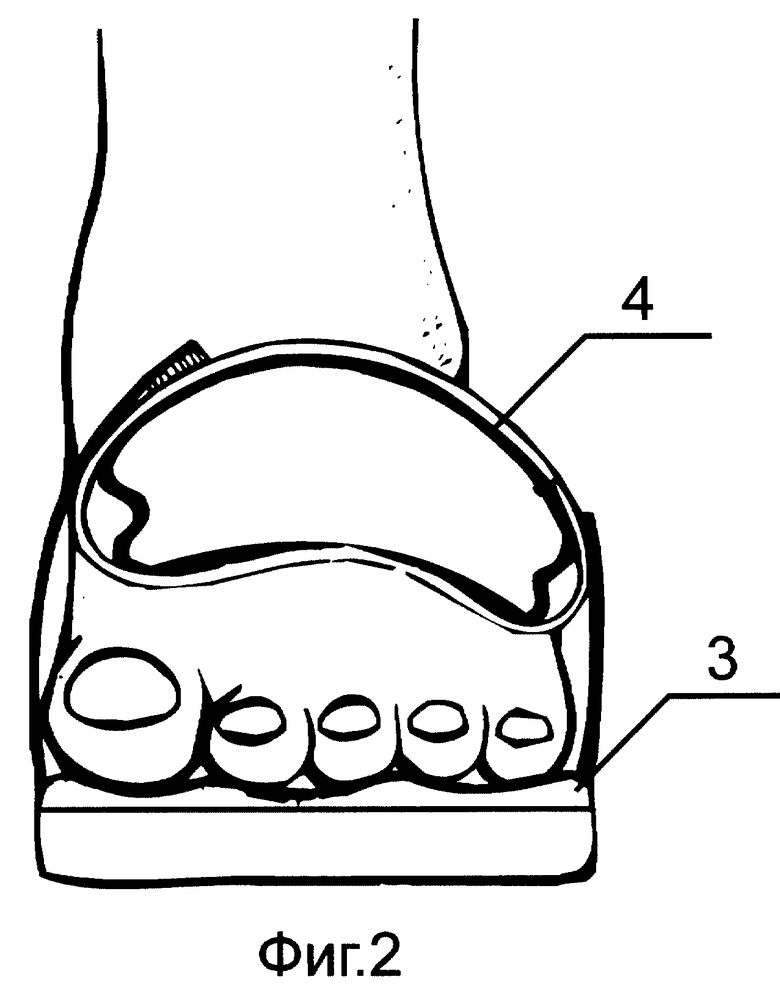
На фиг. 2 представлен внешний вид пневмоботинка (вид спереди).
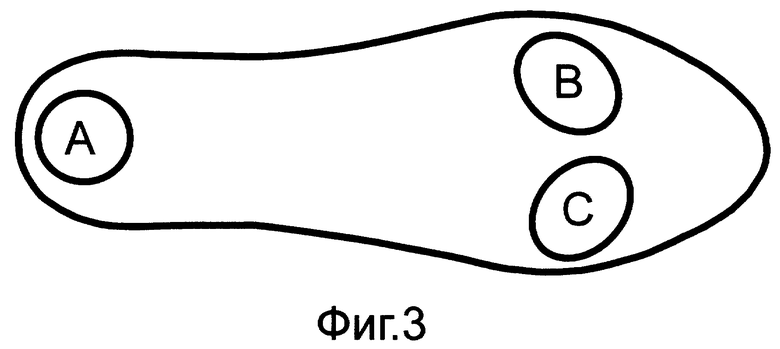
На фиг. 3 представлена схема расположения нагрузочных элементов в анатомически характерных зонах ступни.
На фиг. 4 представлено расположение структурной организация телец Фатер-Пачини на стопе ноги.
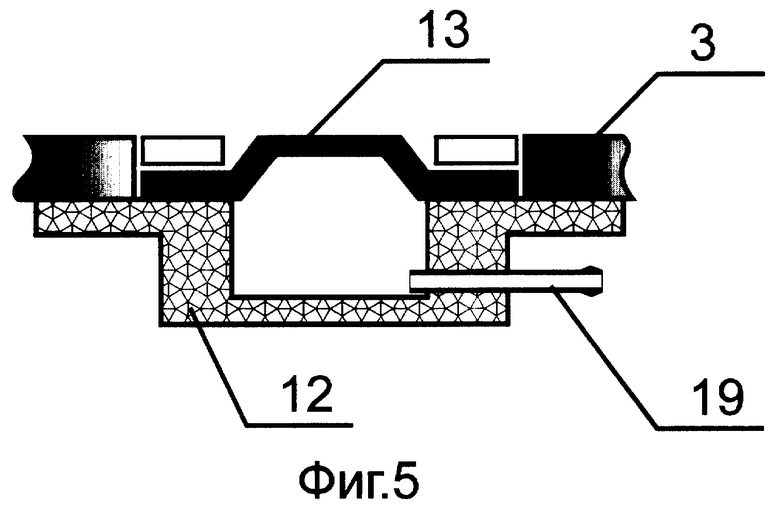
На фиг. 5 представлена пневмокапсула.
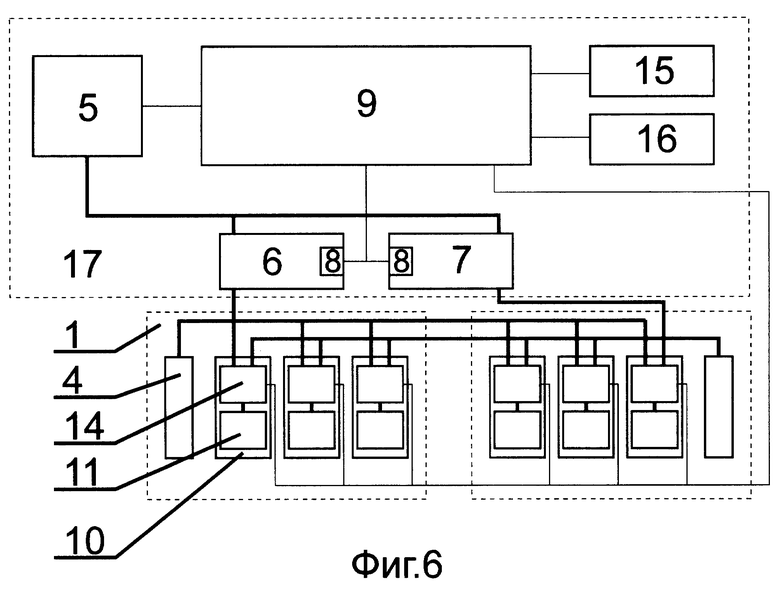
На фиг. 6 представлена блок-схема устройства.
На фиг. 7 представлено соединение пневмоботинков с блоком управления.
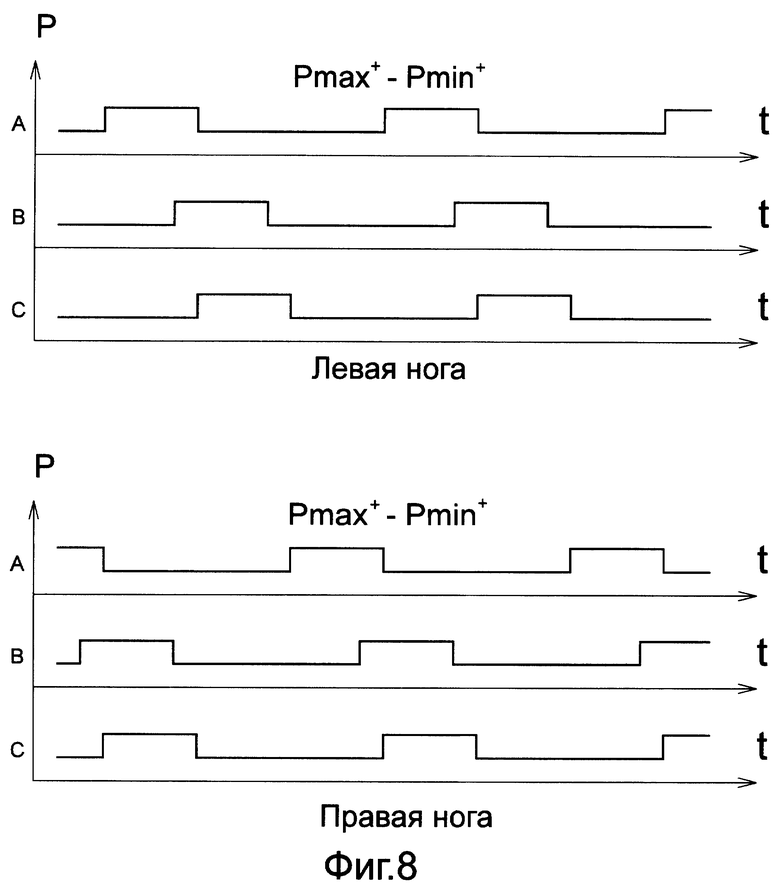
На фиг. 8 представлены диаграммы изменения давления в пневмокапсулах.
Существо изобретения заключается в следующем.
В условиях невесомости происходит изменения в функционировании следующих систем:
1) изменения в сенсорном аппарате стопы.
В условиях невесомости происходит повышение вибрационной чувствительности опорных рецепторов выражающееся в снижении порогов восприятия во всех опорных зонах стопы;
2) изменения в мышечном аппарате голени.
Пребывание в невесомости вызывает изменение скоростно-силовых свойств мышц голени, особенно антигравитационных мышц;
3) изменения в опорном аппарате.
В результате действия невесомости изменяются геометрические параметры стопы;
4) изменения в регуляции позы.
Пребывание в невесомости вызывает смещение ОЦТ, нарушение вертикальной устойчивости.
Снижение гравитационных нагрузок вызывает следующие нарушения функций опорно-двигательного аппарата:
- снижение мышечного тонуса;
- нарушение вертикальной устойчивости;
- изменение структуры локомоторных актов;
- атрофию мышц;
- изменение геометрические параметров стопы.
Одной из причин указанных сдвигов является снижение опорных нагрузок и связанное с ним изменение притока опорной афферентации, играющей важную роль в поддержании тонуса позной мускулатуры и, в частности, мышц голени и стопы. Дополнительным фактором, обуславливающим развитие двигательных нарушений, является изменение структуры и функций опорного аппарата стопы, обусловленные уменьшением жесткости мускулатуры голени и стопы.
Снятие опорных нагрузок сопровождается у человека выраженным снижением поперечной жесткости мышц, особенно антигравитационных, участвующих в поддержании вертикальной позы, как в покое, так и при максимальном напряжении. Снижение жесткости мышц в свою очередь обуславливает ряд эффектов, в частности наблюдавшиеся в условиях гипокинезии и невесомости снижение максимальной силы и мышечных сокращений, уменьшение жесткости мышечного скелета и соответственно осложнение процессов регуляции вертикальной позы и ходьбы. Нарушение вертикальной устойчивости и локомоций связаны со сдвигами в свойствах механорецепторного аппарата стоп, играющего существенную роль в механизмах позного и локомоторного регулирования.
В нормальных условиях опорный аппарат настроен таким образом, что средние физиологические нагрузки на стопу соответствуют мышечному диапазону нагрузочных характеристик рецепторов. Этот диапазон и его пороговые значения определяются состоянием механорецепторов (телец Фатер-Пачини). Изменения порога сопровождается смещением диапазона физиологически дополнительных нагрузок и соответственно ухудшением качества регулирования базирующихся на данной рецепции процессов.
Устройство для реабилитации опорно-двигательного аппарата в условиях невесомости по данному изобретению содержит два пневмоботинка 1, каждый из которых выполнен в виде подошвы 2 с эластичным супинатором 3 и многокамерной манжеты обжатия 4, соединенной с источником давления 5, выполненного в виде миникомпрессора.
В устройство введены соединенные с источником давления 5 ресиверы минимального 6 и максимального 7 давления, соединенные с датчиками давления 8, выходы которых соединены с микропроцессором 9.
Нагрузочные элементы выполнены в виде трех пневмомодулей 10, два из которых расположены в носковой, а один расположен в пяточной частях супинатора в анатомически характерных зонах подошвы.
Каждый пневмомодуль 10 выполнен в виде пневмокапсулы 11, представляющей собой камеру 12 с мембраной 13, поверхность которой расположена на одном уровне с поверхностью супинатора 3, и соединенной с ней электропневмопреобразователя 14, соединенного с ресиверами минимального 6 и максимального 7 давления, соединенными с датчиками давления 8, выходы которых соединены с микропроцессором 9.
Каждая из манжет обжатия 4 соединена с ресивером минимального давления 6, при этом источник давления 5 выполнен в виде миникомпрессора, соединенного с микропроцессором 9. Устройство содержит сенсорную клавиатуру 15 и дисплей 16, соединенные с микропроцессором 9.
Миникомпрессор 5, микропроцессор 9, сенсорная клавиатура 15, дисплей 16, ресиверы минимального 6 и максимального 7 давления с датчиками давления 8 внутри них объединены в единый электроннопневматический блок 17, обеспечивающий работу, управление и контроль за воздействием на опорные зоны стоп ног (фиг. 4).
Многокамерная манжета обжатия 4 свода стопы обеспечивает поджатие ступни к супинатору 3 и взаимосвязь системы:
"Давление в многокамерной манжете <---> пневмокапсулы <---> локальные зоны стопы подошвы"
Предлагаемое устройство позволяет радикально модифицировать профилактику по компенсации опорных разгрузок стоп ног.
Путем подбора алгоритмов, частоты, минимального и максимального уровней пневмовоздействий обеспечивают режим активации опорных зон стоп ног человека, с целью повышения эффективности воздействия на рецепторный аппарат стоп ног, состояние периферической системы кровообращения, мускулатуры, а также обеспечения компенсации опорной разгрузки стоп ног.
Согласно настоящему изобретению воздействие на ступни ног осуществляется с помощью электроннопневматических узлов, вмонтированных в супинатор и расположенных в анатомически характерных зонах стопы.
Преимущество такого принципа пневмовоздействия заключается в его высокой эффективности активации рецепторного аппарата стопы.
Многокамерная манжета обжатия 4 выполнена по форме, позволяющей охватывать свод стопы и голеностопный сустав. Она связана при помощи элементов крепления 18 с подошвой 2 пневмоботинка и изготовлена из прорезиненной ткани.
Конструктивно каждый пневмомодуль 10 выполнен в виде единой пневмосборки, состоящей из пневмокапсулы 11 и электропневмопреобразователя 14. Пневмомокапсула состоит из камеры 12, резиновой мембраны 13 и штуцера 19. Два пневмовхода электропневмопреобразователя 14 соединены поливинилхлоридными трубками с ресиверами минимального 6 и максимального 7 давления, а пневмовыход 14 поливинилхлоридной трубкой соединен со штуцером 19 пневмокапсулы 11. Каждая пневмокапсула функционирует раздельно.
Ресиверы выполнены в виде емкостей, в которых создаются фиксированные и текущие значения P+min и P+max. Для измерения давления в ресиверах размещены миниатюрные датчики давления (например, типа МРХ-5050 фирмы "Motorola"), сигнал с которых поступает в микропроцессор (например, Intel 87C51GB).
Управляющие сигналы с выхода микропроцессора поступают на электропневмопреобразователь (например, ISV-M5 фирмы Festo).
Микропроцессор осуществляет задание давлений в ресиверах P+min P+max, алгоритмы, амплитуды, форму, длительность и фазовый сдвиг пневмоимпульсов в каждой из пневмокапсул левого и правого пневмоботинка.
Сенсорная клавиатура и дисплей, связанные с микропроцессором, обеспечивают задание и контроль режимов воздействия на стопы ног.
Устройство работает следующим образом.
В устройстве запрограммированы алгоритмы воздействия для трех режимов работы:
А. Стойка (Standing)
В. Ходьба (Walking)
С. Бег трусцой (Jogging).
Для каждого из указанных режимов задаются следующие параметры:
P+min - минимальный уровень пневмовоздействия, определенный степенью прилегания пневмокапсул к ступне, и составляет примерно 5-15 кПа;
P+max - максимальный уровень пневмовоздействия, определенный величиной давления на ступни в нормальных условиях. Максимальное давление в пневмокапсулах может быть реализовано до 50кПа избыточного давления.
Рабочий диапазон частот пневмовоздействия составляет 0-30 имп/мин.
Время сеанса до 12 часов непрерывного воздействия.
Пневмоботинки 1 одевают на ступни ног. Соединяют трубопроводами и кабелями (электрическими) пневмоботинки 1 с электроннопневматическим блоком 17.
Включают питание электроннопневматического блока 17. В ресиверах минимального и максимального давления реализуются заданные значения. В камеру обжатия 4 подается минимальное давление, в результате воздействия которого обеспечивается более плотное прилегание супинатора к поверхности стопы.
С помощью сенсорной клавиатуры 15 и дисплея 16 устанавливают выбранный режим работы.
Воздействие на каждую из локальных зон ступней ног (фиг.3,4) осуществляется с помощью резиной мембраны 13 пневмомодуля 10, вмонтированного в подошву пневмоботинка.
В соответствии с заданным режимом и его параметрами каждый электропневмопреобразователь 14, управляемый блоком управления 17, обеспечивает выдачу пневмоимпульсов, под действием которых через мембрану 13 происходит упругая деформация ("дрожь") в характерной локальной зоне стопы.
Геометрическое расположение характерных локальных зон стопы (фиг. 3), а также оригинальные алгоритмы волн пневмовоздействия в целом предполагают возможность создания на поверхности стопы бегущей волны деформации (БВД).
Бегущие волны деформации не очевидны и нетривиальны и испокон веков используются в живой и неживой природе. (А.И. Добролюбов. Механизмы на гибких и упругих элементах. Минск, 1984).
Важнейшая особенность БВД - это транспортирующее свойство, или свойство массопереноса. По-видимому, вызванная БВД обеспечивает наиболее эффективную активацию механорецепторов стоп, а также стимуляцию периферического кровообращения ног.
Благотворное действие устройства не ограничивается только стопой. Его действие отражается на других секторах опорно-двигательного аппарата, в том числе на позвоночнике. Вызванная БВД нормализует гемодинамику в мышцах голени и бедра. Так как опорно-двигательный аппарат - это несущая конструкция, то изменения гравитационной нагрузки ведут к искаженному пространственно-топографическому положению внутренних органов. Поэтому нарушается естественный дренаж, образуются очаги накопления не выведенных продуктов распада, сдавливание сосудов, которое приводит к ухудшению кровоснабжения. За счет организации БВД в характерных зонах стоп ног создается возможность восстановления пространственной топографии внутренних органов. Стабильность достигнутой коррекции их положения обеспечивается восстановлением нормальной осанки и устранением деформаций опорно-двигательного аппарата.
Непрерывная стимуляция локальных зон стоп ног гарантирует в условиях гиподинамии непрерывное поступление информации от механорецепторов в центральную нервную систему.
Такой режим афферентной активности способствует непрерывному поддержанию активности мышц, обеспечивающих вертикальную позу человека на двух ногах.
Активность мускулатуры туловища, разгибание нижних конечностей, реакция подошвы являются основными реакциями на информацию, поступающую при стимуляции опорных рецепторов стоп ног (например, в соответствии с диаграммами фиг. 8).
Устройство согласно настоящему изобретению представляет собой современный электроннопневматический прибор, использующий новейшие принципы функционирования в совокупности с прецизионными электронными и электропневматическими компонентами.
Оригинальное конструктивное выполнение обеспечивает эффективную стимуляцию опорных зон стоп ног человека.
Применение изобретения позволит улучшить общее состояние и самочувствие человека, повысив его работоспособность. Это особенно важно в условиях невесомости.
Применение изобретения является еще одним шагом в познании человека как сложной биофизической системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ХОДЬБЫ С СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ | 2012 |
|
RU2506069C2 |
| УСТРОЙСТВО ДЛЯ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ НАРУШЕНИЙ ЛОКОМОЦИИ (ВАРИАНТЫ) | 2005 |
|
RU2330640C1 |
| СПОСОБ АКТИВАЦИИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ ЧЕЛОВЕКА | 2012 |
|
RU2505277C1 |
| КОСТЮМ ДЛЯ ПРИНУДИТЕЛЬНОГО ИЗМЕНЕНИЯ ПОЗЫ ЧЕЛОВЕКА И СОЗДАНИЯ ПОВЫШЕННОЙ НАГРУЗКИ НА ОПОРНО-ДВИГАТЕЛЬНЫЙ АППАРАТ | 2004 |
|
RU2295321C2 |
| ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2011 |
|
RU2443449C1 |
| СПОСОБ ВЫЯВЛЕНИЯ В КОРЕ ГОЛОВНОГО МОЗГА СЕНСОМОТОРНЫХ ЗОН, ОТВЕТСТВЕННЫХ ЗА ЛОКОМОЦИЮ | 2012 |
|
RU2504329C1 |
| ПОЛИМЕРНОЕ ПОКРЫТИЕ И УСТРОЙСТВО СУХОЙ ИММЕРСИИ | 2011 |
|
RU2441713C1 |
| СТИМУЛЯТОР ВЕНОЗНОГО ПОТОКА | 2008 |
|
RU2391086C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ И ЛЕЧЕНИЯ НАРУШЕНИЙ ФУНКЦИИ И ДЕФОРМАЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2222307C2 |
| Способ восстановительного лечения посттравматической контрактуры голеностопного сустава после переломов костей голени | 2017 |
|
RU2647830C1 |


Изобретение относится к медицинской технике, а именно к электронно-пневматическим устройствам, и может быть использовано для компенсации опорной разгрузки стоп ног, имитации естественных локомоторных актов ходьбы в состоянии невесомости и гиподинамии. Устройство содержит два пневмоботинка, каждый из которых выполнен в виде подошвы с эластичным супинатором и многокамерной манжетой обжатия. Источник давления соединен с ресиверами минимального и максимального давлений, соединенными с датчиками давления, выходы которых соединены с микропроцессором. Нагрузочные элементы выполнены в виде трех пневмомодулей, два из которых расположены в носковой, а один расположен в пяточной части супинатора в анатомически характерных зонах ступни. Каждый пневмомодуль выполнен в виде пневмокапсулы, представляющей собой камеру с мембраной, поверхность которой расположена на одном уровне с поверхностью супинатора, и соединенной с ней электропневмопреобразователя, соединенного с ресиверами минимального и максимального давлений и микропроцессором. Каждая из манжет обжатия соединена с ресивером минимального давления, при этом источник давления выполнен в виде миникомпрессора, соединенного с микропроцессором. Технический результат состоит в создании оптимизированного воздействия на локальные зоны ступней ног. 1 з.п.ф-лы, 8 ил.