Изобретение относится к области спорта, игр, развлечений и может быть использовано для организации противоборства рук соперников, удаленных на расстояние, с использованием компьютерной связи.
Известен способ тренировочного противоборства, при котором пользователь воздействует на поворотную ручку, на которой формируют противодействующую силу с помощью механических средств [Патент США N 5458554, кл. 482-123, кл. МКИ А 63 В 21/02, 1995 г.].
Тренировочное устройство для осуществления описанного способа противоборства (армрестлинга), содержит опорное основание с установленными на нем поворотной ручкой в виде руки соперника и механическим блоком формирования противодействующей силы. В устройстве на поворотной ручке механическими средствами обеспечивается заданное усилие, которое преодолевает тренирующийся пользователь.
Недостатком указанного известного способа и реализующего его устройства является ограниченность применения, при которой невозможно осуществить противоборство рук соперников, удаленных на расстояние (размещенных в разных помещениях).
Наиболее близким к изобретению является способ противоборства рук двух соперников, находящихся на расстоянии друг от друга, при котором каждый из соперников, размещенный у соответствующего опорного основания, воздействует на установленную на нем соответствующую поворотную ручку, при этом формируют на указанных поворотных ручках противодействующие силы с помощью механических средств [Патент США N 4846468, нац. кл. 273-1, кл. МКИ А 63 В 21/28, 1987 г.].
Устройство, реализующее указанный известный способ, содержит первое опорное основание с установленной на нем поворотной ручкой, второе опорное основание с установленной на нем поворотной ручкой и механический блок связи обеих поворотных ручек.
Недостатком известного решения является ограниченность применения, при которой невозможно осуществить противоборство рук соперников, размещенных, например, в удаленных друг от друга помещениях.
Задачей, на решение которой направлено заявляемое изобретение, является обеспечение возможности противоборства рук соперников, не находящихся в одном помещении и за одним столом и удаленных друг от друга на расстояние.
Поставленная задача решается тем, что по способу дистанционного проведения противоборства рук первый из соперников, размещенный у первого опорного основания, воздействует на установленную на ней поворотную ручку, формируют на указанной поворотной ручке противодействующую силу, второй соперник, размещенный у второго опорного основания, воздействует на установленную на нем поворотную ручку, формируют на указанной поворотной ручке противодействующую силу, при этом второго соперника размещают на произвольном расстоянии от первого, формируют сигнал начала противоборства рук соперников, измеряют развиваемые первым и вторым соперниками усилия на каждой из поворотных ручек, противодействующие силы на обеих поворотных ручках формируют с помощью исполнительных электромеханических узлов, измеряют фактические перемещения валов каждого из исполнительных электромеханических узлов, передают упомянутую информацию по компьютерной линии связи, связывающей оба опорных основания, преобразуют измеренные сигналы в цифровые коды и формируют по ним с помощью компьютеров аналоговые сигналы управления для исполнительных электромеханических узлов, а окончание противоборства определяют по результатам сравнений угловых отклонений поворотных ручек на обеих станциях и/или перемещений валов исполнительных электромеханических узлов в течение заданного времени.
Поставленная задача решается также тем, что в устройство для дистанционного проведения противоборства рук соперников, содержащее первое опорное основание с установленными на нем поворотной ручкой и второе опорное основание с установленной на нем поворотной ручкой, введены блоки формирования противодействующей силы, установленные на первом и втором опорном основаниях, два персональных компьютера, размещенные по одному у каждого опорного основания, снабженные идентичными программными средствами и соединенные между собой по линии связи с возможностью обмена информацией, при этом второе опорное основание размещено на произвольном расстоянии от первого опорного основания, а каждый из блоков формирования противодействующей силы содержит исполнительный электромеханический узел, вал которого через редуктор соединен с измерителем усилия, установленным на поворотной ручке и подключенным выходом к первому входу соответствующего персонального компьютера, и датчик перемещения, механически соединенный с валом исполнительного электромеханического узла и подключенный выходом к второму входу соответствующего персонального компьютера.
При этом данный способ и реализующее его устройство обеспечивают возможность организации противоборства рук соперников, удаленных на расстояние друг от друга за счет использования компьютерной связи и электромеханических исполнительных узлов для передачи усилий соперников, создаваемых ими на поворотных ручках.
В устройстве, реализующем предложенный способ, каждый из измерителей усилия может содержать механически соединенную с редуктором винтовую пару, в которой в качестве винта использована каретка с двумя торцевыми пластинами, вращающийся барабан с жестко закрепленной на нем поворотной ручкой и установленный в опорах, жестко соединенных с опорным основанием, шкив, соединенный через пружинный узел с вращающимся барабаном, трос, закрепленный концами между пластин каретки и охватывающий петлей шкив, и потенциометрический датчик, закрепленный между барабаном и шкивом, выход которого образует выход измерителя усилия.
При этом измеритель усилия прост в наладке и надежен в работе.
В устройстве, реализующем предложенный способ, каждое из опорных оснований с установленными на ней поворотной ручкой и блоком формирования противодействующей силы может быть установлено на декоративном станке, выполненном в форме перевернутой пирамиды, при этом поворотная ручка выполнена с возможностью ее возвышения над основанием пирамиды, а вершины основания пирамиды выполнены с возможностью закрепления на них установочных оттяжек.
При этом конструкция устройства позволяет использовать его в различных развлекательных шоу, например на телевидении.
Предлагаемое изобретение поясняется чертежами, где:
на фиг. 1 представлена блок-схема устройства;
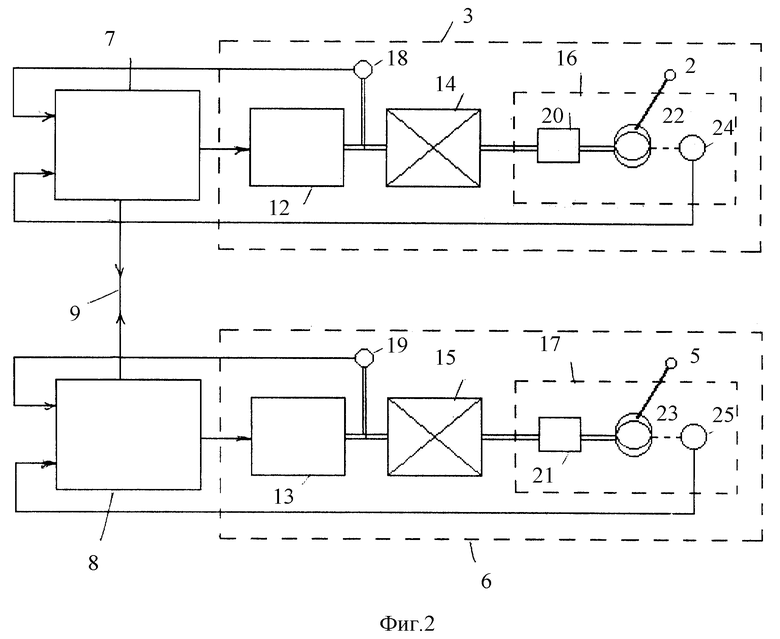
на фиг. 2 представлена функциональная схема устройства;
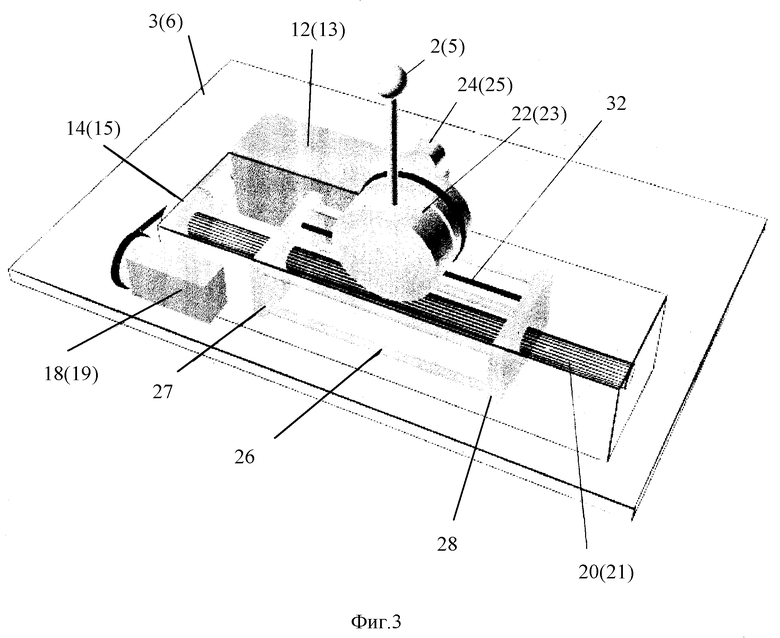
на фиг. 3 представлен пример выполнения конструкции блока формирования противодействующей силы;
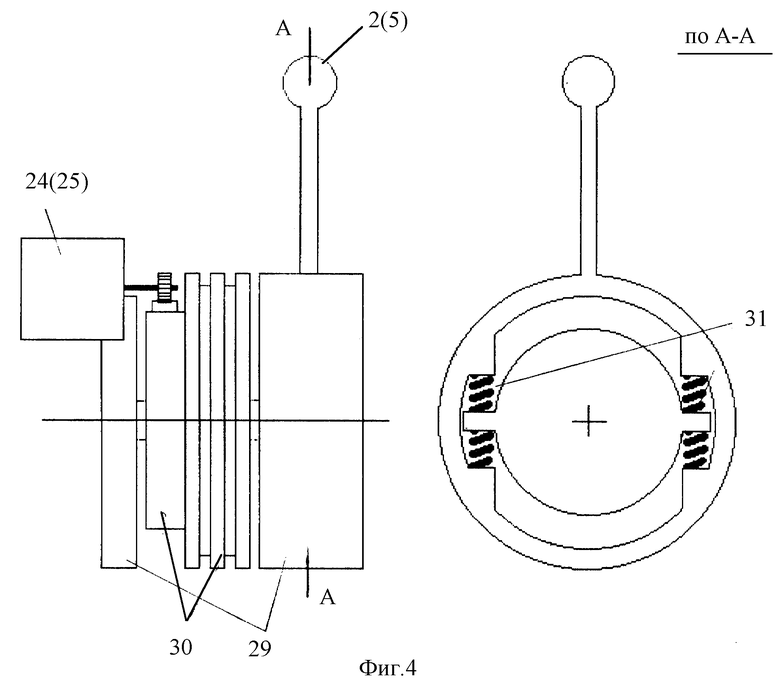
на фиг. 4 представлен пример выполнения блока с поворотной ручкой в измерителе усилия;
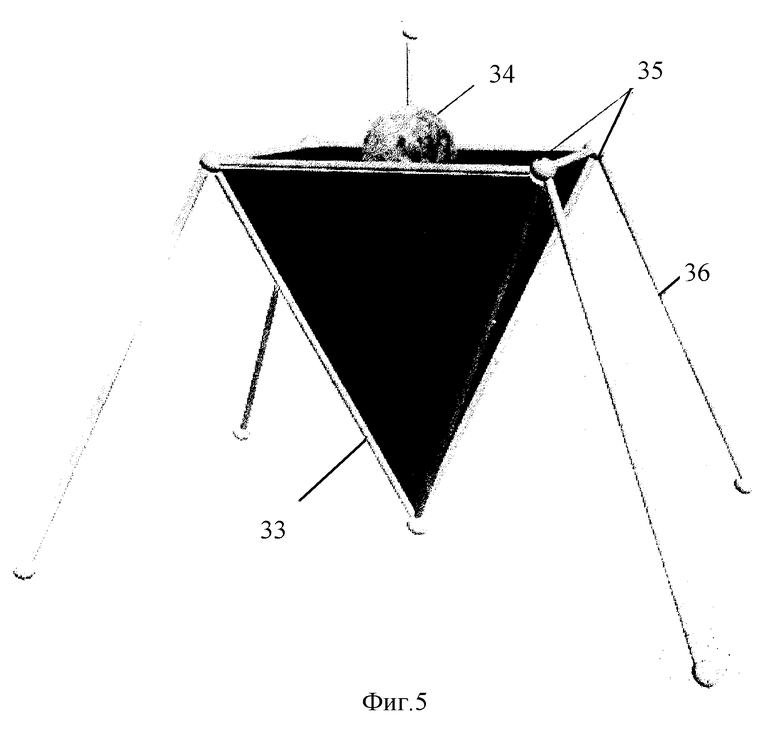
на фиг. 5 представлен пример выполнения устройства на декоративном станке.
Устройство, реализующее предложенный способ дистанционного проведения противоборства рук соперников, содержит первое опорное основание 1 (фиг. 1) с установленными на ней поворотной ручкой 2 и блоком 3 формирования противодействующей силы, второе опорное основание 4 с установленными на ней поворотной ручкой 5, блоком 6 формирования противодействующей силы и размещенное на произвольном расстоянии от первого опорного основания 1.
Устройство содержит также два персональных компьютера 7, 8 (например, типа IBM/PC), размещенные по одному у каждого опорного основания 1, 4, компьютеры снабжены идентичными программными средствами и соединены между собой по линии связи 9 с возможностью обмена информацией (например, по протоколу TCP/IP). Персональный компьютер 7 имеет связь 10 по входам с блоком 3 формирования противодействующей силы, а компьютер 8 имеет связь 11 с блоком 6.
Блоки 3, 6 формирования противодействующих сил содержат исполнительные электромеханические узлы 12, 13 (фиг. 2) с использованием электродвигателей, валы которых через редукторы 14, 15 (например, ременные, цепные передачи) соединены с измерителями усилий 16, 17, подключенными выходами к первым входам соответствующих персональных компьютеров 7, 8. Блоки 3, 6 содержат также датчики 18, 19 перемещения, механически соединенные с валами исполнительных электромеханических узлов 12, 13 соответственно и подключенные выходами к вторым входам соответствующих персональных компьютеров 7, 8. Датчики 18, 19 могут быть выполнены, например, на базе IBM/PC совместимой серийной мыши для COM порта с оптико-механическим принципом действия.
Каждый из измерителей 16, 17 усилий может содержать механически соединенные с редукторами 12, 13 винтовые пары 20, 21 (например, с шагом 3 мм за один оборот), блоки 22, 23, смонтированные на поворотных ручках 2, 5 соответственно и потенциометрические датчики 24, 25 (поворотного типа).
В винтовых парах 20, 21 в качестве винта использована каретка 26 (фиг. 3) с двумя торцевыми пластинами 27, 28. Каждый из блоков 22, 23 содержит вращающийся барабан 29 (фиг. 4) с жестко закрепленной на нем поворотной ручкой 2 (5), шкив 30, соединенный через пружинный узел 31 с вращающимся барабаном 29. Каждый из измерителей 16, 17 усилий содержит трос 32, закрепленный концами между пластинами 27, 28 (фиг. 3) каретки и охватывающий петлей шкив 30 (фиг. 4). Потенциометрический датчик 24 (25) закреплен на барабане 29, а его ось имеет механическую связь со шкивом 30.
Каждое из опорных оснований 1, 4 с установленными на них поворотными ручками 2, 5 и блоками 3, 6 формирования противодействующих сил может быть установлено на декоративном станке (например, из пластика), выполненном в форме перевернутой пирамиды 33 (фиг. 5), при этом поворотная ручка выполнена с возможностью ее возвышения над основанием пирамиды с использованием бутафорской полусферы 34, а вершины 35 основания пирамиды выполнены с возможностью закрепления на них установочных оттяжек 36 (например, из нержавеющей стали).
Устройство, реализующее способ дистанционного проведения противоборства рук соперников, функционирует следующим образом.
Противоборствующие соперники располагаются возле опорных оснований 1, 4, размещенных на расстоянии друг от друга в различных помещениях.
В исходном положении поворотные ручки 2, 5 находятся в нейтральном положении, при котором сигналы на выходах измерителей 16, 17 (фиг. 2) усилий отсутствуют. При поступлении сигнала начала противоборства каждый из соперников осуществляет силовое воздействие на соответствующую поворотную ручку 2, 5.
Через пружинный узел 31 (фиг. 4) усилие передается на шкив 30, механически связанный с осью потенциометрического датчика 24(25), на выходе которого появляется сигнал, линейно зависящий от приложенного усилия и поступающий на вход соответствующего компьютера 7(8).
В соответствии с заложенной программой компьютеры 7, 8 сравнивают поступающие сигналы и формируют аналоговые управляющие сигналы для соответствующих исполнительных электромеханических узлов 12(13), приводящих в движение через редукторы 14(15) (например, ременные передачи) соответствующие винтовые пары 20, 21 с каретками.
При этом каретки 26 (фиг. 3) перемещаются в сторону действия наибольшего из сигналов, поступающих с измерителей усилий 16, 17.
При перемещении каретки 26 с помощью закрепленного в ней троса 32 обеспечивается поворот шкива 30 (фиг. 4). Сигналы с датчиков перемещений 18, 19 используются в качестве сигналов обратной связи для исполнительных электромеханических узлов 12(13). Окончание противоборства определяют по результатам сравнений угловых отклонений поворотных ручек 2, 5 и/или перемещений валов исполнительных электромеханических узлов 12, 13 в течение заданного времени.
Экспериментальная проверка заявленных способа и устройства (под названием "Рука Москвы") подтвердила их работоспособность и возможность использования при проведении развлекательных шоу, в частности на телевидении. Таким образом изобретение обеспечивает возможность проведения противоборства рук соперников, удаленных на расстояние при использовании компьютерной связи и электромеханических исполнительных узлов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕРНО-МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СПОРТСМЕНОВ | 1993 |
|
RU2084256C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ ЧЕЛОВЕКА НА МОТИВАЦИОННОЙ ОСНОВЕ | 2004 |
|
RU2280405C2 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ ЧЕЛОВЕКА | 2004 |
|
RU2283619C2 |
| ТРЕНАЖЕР | 2000 |
|
RU2201784C2 |
| ТРЕНАЖЕР (ВАРИАНТЫ) | 2000 |
|
RU2201783C2 |
| ТРЕНАЖЕР ДЛЯ ГОРНОЛЫЖНИКОВ | 2021 |
|
RU2757660C1 |
| Стенд для испытания электроприводов стрелочных переводов | 2020 |
|
RU2750306C1 |
| КОМПЛЕКС ДЛЯ ИНТЕРАКТИВНОЙ СПОРТИВНОЙ ИГРЫ В КЁРЛИНГ ЛАЙТ | 2020 |
|
RU2731532C1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| Стенд для диагностических испытаний электроприводов стрелочных переводов | 2023 |
|
RU2810891C1 |
Способ заключается в том, что первый из соперников, размещенный у первого опорного основания, воздействует на установленную на нем поворотную ручку, второй соперник, размещенный у второго опорного основания на произвольном расстоянии от первого, воздействует на установленную на нем поворотную ручку, формируют на поворотных ручках противодействующую силу с помощью исполнительных электромеханических узлов, измеряют развиваемые первым и вторым соперниками усилие на каждой из поворотных ручек, измеряют перемещение валов каждого из исполнительных электромеханических узлов, передают информацию по компьютерной линии связи, связывающей оба опорных основания, преобразуют сигналы в цифровые коды и формируют по ним аналоговые сигналы управления. Окончание противоборства определяют по результатам сравнения угловых отклонений поворотных ручек и/или перемещений валов электромеханических узлов в течение заданного времени. Устройство содержит первое опорное основание и второе опорное основание с поворотными ручками, размещенные на произвольном расстоянии, блоки формирования противодействующей силы, два персональных компьютера по одному у каждого основания с идентичными программными средствами, соединенные между собой с возможностью обмена информацией. Блоки формирования противодействующей силы содержат исполнительные электромеханические узлы, валы которых через редуктор соединены с измерителями усилия, установленными на поворотных ручках и подключенными выходом к первому входу соответствующего персонального компьютера. Использование заявленной группы изобретений обеспечивает возможность проведения противоборства рук соперников, удаленных на расстояние при использовании компьютерной связи и электромеханических исполнительных узлов. 2 с. и 2 з.п.ф-лы, 5 ил.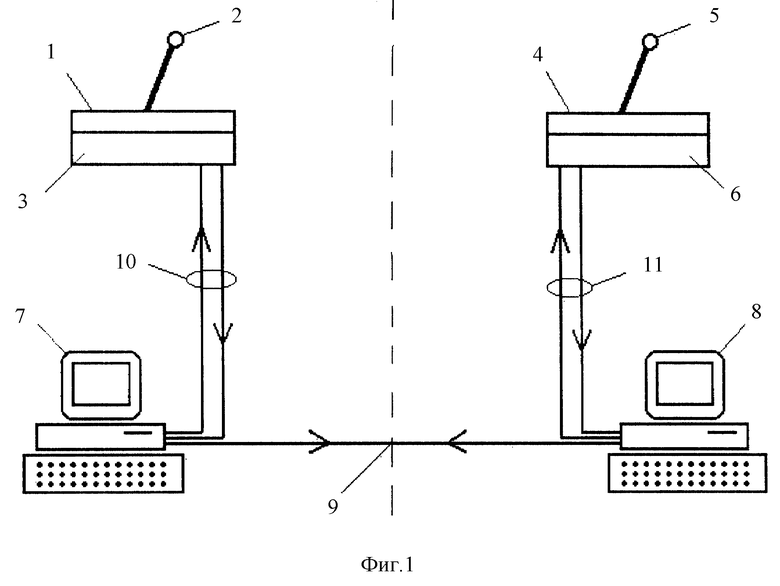
| US 4846468 A1, 11.07.1987 | |||
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ДРОБИЛКА ДЛЯ ЖЕЛЕЗОБЕТОННЫХ ОТХОДОВ | 1998 |
|
RU2152826C1 |
| СПОСОБ ЗАЩИТЫ ЭЛЕКТРОМАГНИТНЫХ ИЗЛУЧЕНИЙ ОТ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2001 |
|
RU2190303C1 |
| Механизм для состязания в силе | 1940 |
|
SU66922A1 |
| Устройство для тренировки кистей рук | 1990 |
|
SU1784242A1 |

