Изобретение относится к средствам, обеспечивающим поражение целей, и может быть использовано при разработке систем управления вооружением пилотируемых летательных аппаратов.
Известна система управления вооружением (СУВ) истребителя, содержащая:
- бортовой комплекс аппаратуры наведения на цель, телеметрически связанный с аппаратурой аналогичного наименования, размещаемой на земле и командных пунктах типа "Авакс";
- многофункциональную бортовую радиолокационную станцию (БРЛС) и как дополнение к ней бортовую оптиколокационную станцию (БОЛС), предназначенные для обнаружения целей, их селекции перед атакой, автоматического или полуавтоматического сопровождения в процессе атаки, измерения координат и параметров движения выбранных для атаки с помощью включенных в эти устройства датчиков информации;
- бортовой комплекс навигационного оборудования с датчиками полетной информации, используемой при решении задач наведения, навигации, прицеливания и пилотирования;
- бортовой комплекс индикаторов прицельной, навигационной и пилотажной информации для обеспечения участия летчика в реализации решаемых боевых и других задач в полете;
- вычислительную систему, составленную из множества бортовых цифровых вычислительных машин (БЦВМ), в том числе непосредственно входящих в каждое из перечисленных устройств, связанных между собой схемой мультиплексирования с целью осуществления комплексного функционирования, позволяющего повысить эффективность применения авиационного вооружения и возможность ее наращивания путем совершенствования программного обеспечения (см., например, книгу "Тенденции и перспективы развития высоконадежных бортовых цифровых вычислительных систем". Научно-информационный центр, 1983 г., с.19).
Упоминанием многофункциональности БРЛС в данном объяснении подчеркивается тот факт, что современные разработки этого вида авиационной техники позволяют осуществлять (путем соответствующих настроек излучения) обнаружение и сопровождение одновременно нескольких воздушных, а в перспективе и наземных целей с тем, чтобы их все поражать несколькими, одновременно пущенными ракетами. Перестройки в БРЛС приходится производить и при действиях, например, только по воздушной цели в зависимости от ее удаленности (дальний и ближний бой), ее расположения относительно истребителя (впереди, сзади или сбоку), выбранного оружия и других признаков, принимаемых в расчет волевым решением (выбором) самого летчика. По такому же пути ведется совершенствование оптических локационных визирных систем, к ним дополнением в бортовое оборудование вводятся вспомогательные визирные устройства (нашлемные, оптические с ручным управлением визирной линией и др.), разрабатываются алгоритмы рационального сопряжения сходных по назначению устройств с помощью упомянутой вычислительной системы и ее алгоритмического обеспечения (см. выпуск издания "POLYGON", посвященный самолет Су-27, изд. Гончар, Москва, 1992, 1993 г., с.с. 16-17).
Кроме того, на практике принято деление операций боевого применения самолета на так называемые типовые ситуации (ТС).
Одной из причин, препятствующих достижению требуемого технического результата при использовании описанной СУВ истребителя, является сложность удержания пилотом (оператором) в памяти множества непосредственно им исполняемых предписаний по согласованию состояний СУВ с выбором типовых ситуаций, потребность обозревать при этом взглядом все пространство своей кабины. Неточное и недостаточно быстрое выполнение предписаний ведет к снижению эффективности атаки. В какой-то мере оно компенсируется летчиками-истребителями за счет существующего в практике предварительного изучения запланированных на летный день ТС путем чтения руководства по летной эксплуатации (РЛЭ). Однако и эта мера не позволяет, как показывает практика, полностью избежать ошибок. Еще вероятнее они могут быть в реальных боевых действиях.
Наиболее близким техническим решением (прототипом изобретения) является "Система управления вооружением истребителя" (см., например, описание патента N 2024818 от 15.12.1994 г., МПК: F 41 G 3/22). В эту систему управления вооружением входят многофункциональная бортовая радиолокационная станция и оптиколокационная, например, телевизионная визирная система, бортовой комплект аппаратуры наведения и бортовой комплект навигационного оборудования с датчиками полетной информации, комплект индикаторов прицельной, навигационной и пилотажной информации, бортовой комплект аппаратуры радиотелеметрической связи и целераспределения истребителей в групповом бою, а также вычислительная система, мультиплексно через линию передачи информации связанная с перечисленными устройствами с целью комплексного их использования в боевых действиях, обусловленных применением авиационного вооружения.
Однако вышеотмеченный недостаток - сложность работы летчика по согласованию состояний СУВ с выбором типовых ситуаций - этим решением не устраняется.
Сущность изобретения состоит в том, что в систему управления вооружением, например, истребителя, включающую бортовые радиолокационную и оптиколокационную станции, бортовые комплексы аппаратуры наведения, навигационного оборудования, индикаторы прицельной, навигационной и пилотажной информации, и комплекс радиотелеметрической связи и целераспределения в групповом бою, через линию передачи информации подключенные к соответствующим входам-выходам бортовой цифровой вычислительной машины, введены два оконечных устройства, пульты задания режимов и оперативной настройки, блоки режимов, управления режимами, управления индикатором режимов, настройки, правления настройкой и управления индикацией пульта оперативной настройки и индикатор режимов, причем пульт задания режимов группой входов соединен с группой выходов, а группой выходов подключен к группе входов блока режимов, выход которого соединен с первым входом блока управления режимами, который первым выходом подключен к входу первого оконечного устройства, вторым выходом соединен со входом блока режимов, третьим выходом подключен к первому входу блока управления индикатором режимов, а вторым входом соединен с выходом первого оконечного устройства, своим входом-выходом через линию передачи информации подключенного к соответствующему входу-выходу бортовой цифровой вычислительной машины, вход индикатора режимов соединен с выходом блока управления индикатором режимов, вторым входом подключенного к первому выходу блока управления настройкой, первым входом соединенного с четвертым выходом блока управления режимами, а вторым и третьим входами подключенного к выходу второго оконечного устройства и выходу блока настройки соответственно, а вторым и третьим выходами соединенного соответственно с входом блока управления индикацией пульта оперативной настройки и входом второго оконечного устройства, входом-выходом через линию передачи информации подключенного к соответствующему выходу-входу бортовой цифровой вычислительной машины, при этом блок управления индикацией пульта оперативной настройки выходом соединен с входом пульта оперативной настройки, группой выходов подключенного к группе входов блока настройки.
Предлагаемая система управления вооружением упрощает работу летчика по выбору типовых ситуаций и повышает оперативность его действий в экстремальных ситуациях.
На фиг. 1 представлена блок-схема системы управления вооружением летательного аппарата, на фиг. 2 показан вид пульта задания режимов вместе с индикатором режимов, а на фиг. 3 показан вид пульта оперативной настройки. На фиг. 4-18 приведены алгоритмы работы вычислительных блоков системы управления вооружением.
Система управления вооружением содержит:
- многофункциональную бортовую радиолокационную станцию 1 (далее БРЛС), предназначенную для обнаружения воздушных и наземных целей, их сопровождения и измерения их координат. БРЛС 1 содержит приемные и передающие устройства радиолокационных сигналов, а также процессор первичной обработки сигналов (на фиг. не показаны). Выполнение БРЛС 1 см., например, С.З. Кузьмин "Основы проектирования систем обработки радиолокационной информации", М. "Радио и связь", 1986 г., с. 319;
- бортовую оптиколокационную станцию 2 (далее БОЛС); которая предназначена для обнаружения и сопровождения цели и измерения ее координат. БОЛС 2 включает механизм сканирования, устройство для приема и модуляции инфракрасного излучения и преобразования его в электрический сигнал, а также блок обработки видеосигнала (на фиг. не показаны). Выполнение ОЭВС 2 см., например, Л. П. Лазарев "Инфракрасные и световые приборы", М. "Машиностроение", 1970 г" с. 259;
- бортовой комплекс 3 аппаратуры наведения (далее БКАН), предназначенный для автоматической радиотелемеханической связи с внешней системой наведения (на фиг. не показана). Выполнение БКАН 3 см., например, в описании к патенту N 2024818;
- бортовой комплекс 4 навигационного оборудования (далее БКНО), предназначенный для измерения, вычисления, индикации и выдачи параметров движения самолета, на котором установлена система управления вооружением. Выполнение БКАН 4 см. , например, в книге "Информационное оборудование высотно-скоростных параметров современных и перспективных зарубежных военных самолетов". Издательство ОЦАОНТИ, 1981 г., с.4;
- бортовой комплекс 5 аппаратуры радиотелеметрической связи и целераспределения (далее БКРС), предназначенный для автоматической межсамолетной радиотелемеханической связи с СУВ других самолетов, с которыми взаимодействует данный самолет с целью передачи информации об обстановке, собранной бортовым оборудованием этих самолетов. БКРС 5 выполнен в соответствии с БКРС описания патента 2024818;
- бортовой комплекс 6 индикаторов прицельной, навигационной и пилотажной информации (далее БКИ), предназначенный для представления летчику информации о внешней обстановке и информации, необходимой для пилотирования самолета. БКИ 6 выполнен, например, в виде системы индикации, приведенной в обзоре по материалам зарубежной печати "Системы управления оружием самолетов стран НАТО", Научно-информационный центр, 1988 г, с. 39;
- бортовая цифровая вычислительная машина 7 (далее БЦВМ), связанная своими входами-выходами с соответствующими входами-выходами БРЛС 1, БОЛС 2, БКАН 3, БКНО 4, БКРС 5 и БКИ 6. БЦВМ 7 координирует работу всех блоков СУВ, приема и выдачи информации через линию передачи информации (на фиг. не обозначена). БЦВМ 7 выполнена, например, в соответствии с типовой структурой, описанной в книге "Тенденции и перспективы развития бортовых цифровых вычислительных систем". Научно-информационный центр, 1981 г., с. 39;
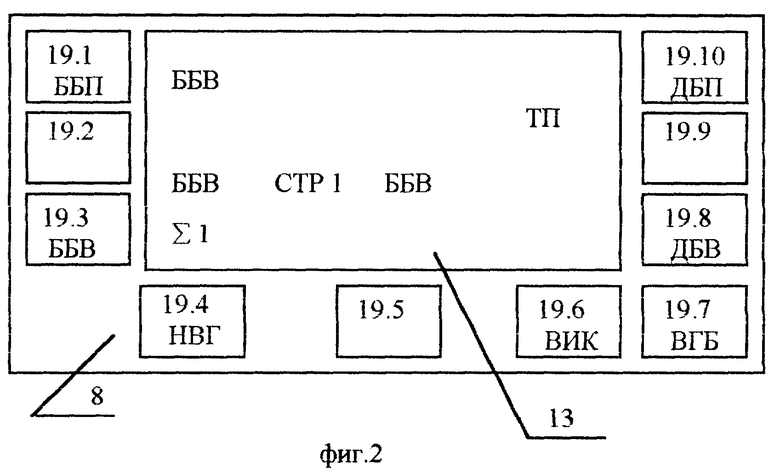
- пульт 8 задания режимов (далее ПЗР 8), предназначенный для регистрации выбираемой летчиком типовой ситуации (режима);
- блок 9 режимов (далее БР 9), представляющий собой шифратор-дешифратор, группой входов соединенный с группой выходов аналого-цифрового преобразователя (АЦП), а группой выходов подключенного к группе входов цифроаналогового преобразователя (ЦАП), при этом группа входов АЦП соединена с группой входов, а группа выходов ЦАП подключена к группе выходов блока 9 режимов, причем выход шифратора подключен к выходу, а вход дешифратора соединен с входом блока 9 режимов (на фиг. не показано). Блок 9 режимов предназначен для преобразования сигналов с ПЗР 8 в цифровой код и выдачи аналоговых сигналов на ПЗР 8, шифратор-дешифратор, АЦП и ЦАП выполнены по технике КМОП, описанной в книге У. Титце и др. "Полупроводниковая схемотехника", М., Мир, 1982 г. , с. с. 307 - 326;
- блок 10 управления режимами (далее БУР 10), предназначенный для формирования признаков режимов, выполненный в виде, например, процессора на микросхеме 1806 ВМ2 (см. Каталог микросхем, вычислительных средств и запоминающих устройств, 1993 г., с. 17):
- первое оконечное устройство 11 (далее ОУ1 11), предназначенное для передачи признаков режимов в линию передачи информации, выполненное по типу 1582 ВЖЗ-0237 (см. , например, Интегральные микросхемы, каталог, том N 1 (Цифровые и аналоговые микросхемы), изд. Гос. Центра КБ "Дейтон", 1996 г., с. 15);
- блок правления 12 индикатором режимов (далее БУИР 12), предназначенный для формирования пояснительных надписей в каждом режиме, выполненный в виде микросхемы 556 РТ7А (см., например. Каталог интегральных микросхем, том N 2, изд. ЦКБ, 1986 г., с. 19);
- индикатор 13 режимов (далее ИР 13), предназначенный для индикации пояснительных надписей в каждом режиме, выполненный на светодиодных матрицах ИПВ 70 (см. , например, Отраслевой руководящий материал "Индикаторы знакосинтезирующие, группа 53-49", Сборник РМ 11073, 071.2-82. изд. Российский электростандарт, с. 13);
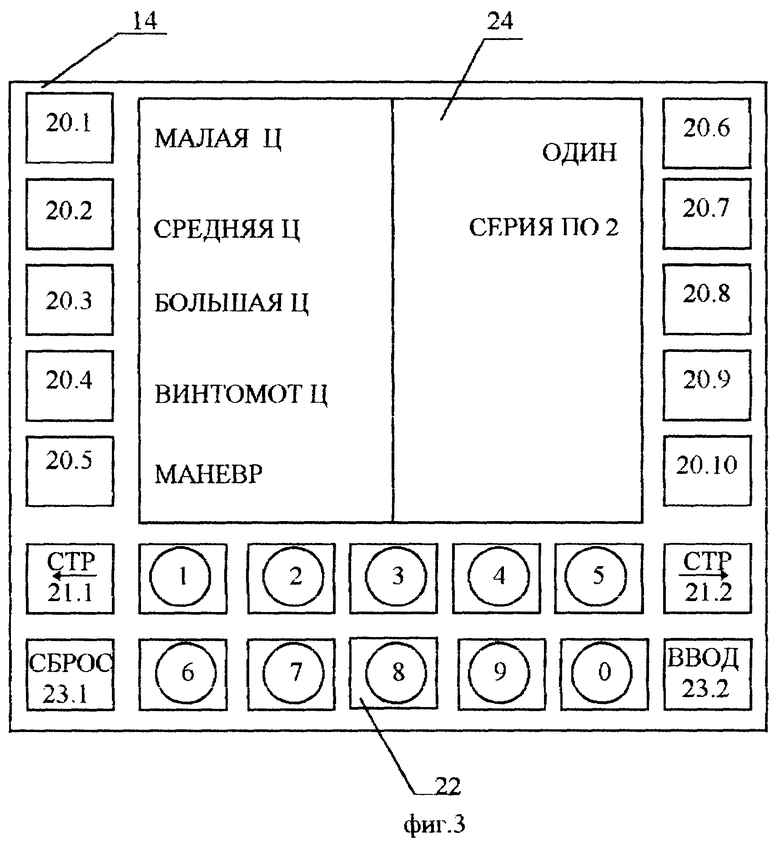
- пульт 14 оперативной настройки (далее ПОН 14), предназначенный для регистрации предписаний;
- блок 15 настройки (далее БН 15), представляющий собой шифратор, группой входов соединенный с группой выходов аналого-цифрового преобразователя (АЦП), подключенного к группе входов блока 15 настройки, причем выход шифратора соединен с выходом блока 15 настройки (на фиг. не показано). Блок 15 настройки предназначен для преобразования сигналов с ПОН 14 в цифровой код, при этом шифратор и АЦП выполнены по технике КМОП, описанной в книге У. Титце и др. "Полупроводниковая схемотехника", М. Мир, 1982 г., с.с. 307 -326;
- блок 16 управления настройкой (далее БУН 16), предназначенный для формирования алгоритмов настройки ПОН 14, выполненный в виде процессора 1802 ВМ2 (см., например, Каталог микросхем, вычислительных средств и запоминающих устройств, 1993 г., с. 18);
- второе оконечное устройство 17 (далее ОУ2 17), предназначенное для передачи предписаний по проведению оперативной настройки СУВ на типовую ситуацию в линию передачи информации, выполненное по типу 1582 ВЖЗ-0237 (см., например. Интегральные микросхемы, каталог, том N 1 (Цифровые и аналоговые микросхемы), изд. Гос. Центра КБ "Дейтон", 1996 г., с. 15).
- блок 18 управления индикацией ПОН (далее БУИ 18), предназначенный для формирования индикации предписаний и выполненный в виде микросхемы 573 РФ4 (см. , например, Каталог интегральных микросхем, том N 2, ЦКБ, 1986 г., с. 25).
Пульт 8 задания режимов группой входов соединен с группой выходов, а группой выходов подключен к группе входов блока 9 режимов, выход которого соединен с первым входом блока 10 управления режимами, который первым выходом подключен к входу первого оконечного 11 устройства, вторым выходом соединен со входом блока 9 режимов, третьим выходом подключен к первому входу блока 12 управления индикатором режимов, а вторым входом соединен с выходом первого оконечного устройства 11, своим входом-выходом через линию передачи информации подключенного к соответствующему входу-выходу бортовой цифровой вычислительной машины 7, вход индикатора 13 режимов соединен с выходом блока 12 управления индикатором режимов, вторым входом подключенного к первому выходу блока 16 управления настройкой, первым входом соединенного с четвертым выходом блока 10 управления режимами, а вторым и третьим входами подключенного к выходу второго оконечного устройства 17 и выходу блока 15 настройки соответственно, а вторым и третьим выходами соединенного соответственно с входом блока 18 управления индикацией пульта оперативной настройки и входом второго оконечного устройства 17, входом-выходом через линию передачи информации подключенного к соответствующему выходу-входу бортовой цифровой вычислительной машины 7. При этом блок 18 управления индикацией пульта 14 оперативной настройки выходом соединен с входом пульта 14 оперативной настройки, группой выходов подключенного к группе входов блока 15 настройки.
Пульт 8 задания режимов содержит кнопки 19 (в настоящем примере (фиг. 2) 10 кнопок). Клавиатура ПЗР 8 и ПОН 14 выполнена по типу ПК-175 (см., например. Отраслевой руководящий материал "Индикаторы знакосинтезирующие, группа 53-49", Сборник РМ 11073, 071.2-82, изд. Российский электростандарт, с. 21).
Кнопки 19 ПЗР 8 обозначены надписями в виде аббревиатур, образованных из наименований выбираемых летчиком типовых ситуаций. Выбор осуществляется путем нажатия соответствующей кнопки. Программами функционирования предлагаемой системы обеспечены следующие типовые ситуации:
- атака визуально наблюдаемой наземной цели (ближний бой по поверхности - ББП) (кнопка 19.1);
- ведение ближнего боя с воздушной целью (ББВ) (кнопка 19.3);
- осуществление движения (навигационного) по маршруту (НВГ) (кнопка 19.4).
- выход в информационный контакт (ВИК) (кнопка 19.6) с противником, более просто понимаемый как обнаружение цели бортовыми средствами;
- ввод в групповой воздушный бой (ВГБ) (кнопка 19.7);
- ведение дальнего боя с воздушной целью (ДБВ) (кнопка 19.8);
- атака визуально ненаблюдаемой, в частности удаленной цели, расположенной на земной поверхности (ДБП) (кнопка 19.10);
Три необозначенные надписями кнопки (19.2, 19.5 и 19.9) из состава режимных кнопок ПЗР 8 (приведенного в данном примере), являются резервными в расчете на возможность введения других ТС. Режимные кнопки обрамляют встроенный в ПЗР 8 пульт индикатора 13 режимов.
ИР 13 содержанием изображаемой записи функционально связан с выбором конкретной ТС (кнопки 19).
Пульт 14 оперативной настройки содержит кнопки 20 многофункционального назначения, кнопки 21 для перелистывания страниц, кнопки 22 цифрового наборного поля, кнопки 23 ввода и сброса цифровой информации (всего 24 кнопки) и табло 24 предписаний.
Кнопки 19 пульта 8 задания режимов подключены к соответствующим выходам пульта (10 линий), а лампочки подсвечивания этих кнопок (на фиг. не обозначены) соединены с соответствующими входами пульта (10 линий).
Кнопки 20, 21, 22 и 23 пульта 14 оперативной настройки подключены к соответствующим выходам (всего 24 выхода), а вход табло 24 предписаний соединен с входом пульта 14.
Каждая надпись многофункциональной кнопки ПОН заключает в себе предписание по проведению оперативной настройки СУВ на типовую ситуацию. Совокупность одновременно подсвечиваемых надписей многофункциональных кнопок представляет собой страницу. Предписание исполняется самим летчиком путем нажатия соответствующей кнопки. Содержание и количество индицируемых таким способом предписаний изменяется при переходах от одной ТС к другой, назначение которой, как указано выше, пилот (оператор) осуществляет нажатием режимной кнопки на пульте 8 задания режимов.
В качестве примера на фиг. 2 приведена запись, получаемая на индикаторе 13 режимов при нажатии кнопки 19.3 ББВ. Самая простая из обозначенного выше перечня ТС, эта запись читается следующим образом.
"Введена типовая ситуация ББВ". "Выбрано применение теплопеленгатора в качестве визирной системы" (более точно следует понимать, что используется БОЛС 2 с теплопеленгатором в качестве основного звена). "Применительно к выбранной ситуации ББВ индицируется содержание первой страницы (СТР1), рассчитанное на применение вооружения ближнего боя". "Всего в изложении данной ТС предусмотрена одна страница" (Σ 1).
Изложение всякой иной типовой ситуации из приведенного выше списка укладывается более чем в одну страницу. Наиболее емкая из них - ситуация ББП - содержит 7 страниц ПОН и дается с перечислением поочередно предлагаемых видов оружия.
В предложенном здесь к рассмотрению конкретном примере индицируемые надписи (предписания) означают следующее.
Четырьмя альтернативными записями у левого ряда кнопок 20.1 - 20.5 ПОН 14 (см. фиг. 3) летчику предлагается самому определить и установить тип атакуемой цели. Нажатием выбранной кнопки он свое решение вводит в СУВ для настройки ее элементов оптимальным образом на уничтожение цели указанного типа: малой, средней или большой по размерам, в особом случае (для воздушных целей) винтомоторной в предположении, что все предыдущие типы воздушных целей относятся к разряду реактивно движущихся. Нажатием пятой кнопки 20.5 МАНЕВР в БЦВМ 7 в алгоритмах управления самолетом подключают группу алгоритмов, обеспечивающих реализацию специальных оборонительных и наступательных маневров в дальнем бою с воздушной целью.
Двумя альтернативными предписаниями на табло 24 справа (кнопки 20.6 и 20. 7 ПОН 14) летчику предлагается сделать выбор режима ведения огня (например, пуска ракет в данном случае). Запись ОДИН означает, что по каждому нажатию боевой кнопки от нашего самолета отделяется одна ракета. Запись СЕРИЯ ПО2 означает, что по каждому нажатию боевой кнопки от нашего самолета отделяется по две ракеты с выдерживанием небольшого временного интервала между ними для предохранения от столкновения. Сходные предписания, но с большим количеством альтернатив существуют и по другим видам вооружения. В приложении к самой сложной ситуации - ДБП (дальний бой по поверхности) - заполненными оказываются все 10 надписей (исполняемых по-прежнему нажатием кнопок (20.1 -20.10) данной группы). Выполненная в сокращенной или аббревиатурной форме каждая такая запись понятна летчику, поскольку такой же она выполнена в, например, руководстве по летной эксплуатации самолета.
Работа системы осуществляется следующим образом.
Обмен информацией между блоками СУВ 1-7, 10, 16 организован в соответствии с ГОСТ 26765. 52-87. Каждый из этих блоков через свои оконечные устройства (для блоков 1-7 на фиг. не показаны) по сигналу от контроллера (на фиг. не показан), находящегося в БЦВМ 7, выдает и принимает информацию через линию (на фиг. не обозначена) передачи информации.
При нажатии любой из режимных кнопок 19 ПЗР 8 (назначении типовой ситуации) сигнал о ее включении в виде напряжения определенной величины (признак режима) поступает с одного из выходов (соответствующего нажатой кнопке) группы выходов ПЗР 8 на соответствующий вход группы входов БР9. Комбинацию входных сигналов БР9 в виде напряжения на одном из входов и его отсутствия на остальных преобразует в цифровой код, состоящий из "0" и "1". Этот сигнал цифрового кода с выхода БР9 в виде последовательною кода РТМ-1609 (см., например, Руководящий технический материал авиационной техники, РТМ-1609-79. Информационный обмен между модулями бортовых цифровых вычислительных машин". 1979 г. ) поступает на первый вход БУР 10, где его преобразуют к виду, используемому в линии передачи информации в соответствии с ГОСТ 26765.52 - 87 (ему присваивают адреса потребителей (блоков 1-7), вводят признак четности, изменяют разрядность и т.п.), и через выход первого оконечного устройства 11 он по сигналу от контроллера поступает через линию передачи информации потребителям данной кнопки. Факт нажатия режимной кнопки на ПЗР 8 фиксирует БУР 10. В течение 0,5 с (счетчик времени (на фиг. не показан) организован в БУР 10) от потребителей на вход первого оконечного устройства 11 приходят ответные "квитанции" в виде посылаемого кода, но с признаком "квитанции", которые поступают в БУР 10, где их суммируют, и при наличии суммарной квитанции признак режима представляют в коде РТМ-1609, затем дешифруют в БР9.
При этом на одном из выходов (этот выход соответствует ранее нажатой кнопке) группы выходов БР9 возникает напряжение определенной величины, которое поступает на соответствующий вход группы входов ПЗР 8, что приводит к загоранию лампочки, подсвечивающей соответствующую режимную кнопку. После получения вторых ответных "квитанций" (после нажатия второй режимной кнопки) БУР 10 признак режима, назначенного первым, обнуляет, что приводит к отсутствию напряжения на одном из входов группы входов ПЗР 8, соответствующему первому выбранному режиму.
Когда режим выбран, то есть в БУР 10 сформирован соответствующий код РТМ - 1609, он с третьего выхода БУР 10 поступает на первый вход БУИР 12, а с четвертого выхода на первый вход БУН 16. БУИР 12 формирует код, из которого составляют надписи на ИР 13.
Сигнал (код индицируемых, то есть поджигаемых точек светодиодных матриц (на фиг. не показаны)), в котором зашифрован вид буквы или цифры и их место на ИР 13, поступает на вход ИР 13, где в соответствии с кодом подсвечивают упомянутые светодиодные матрицы. Надпись включает название типовой ситуации, обозначение первой страницы и ее название, сумму страниц в типовой ситуации, пояснения о составе страниц.
По признаку выбранного режима БУН 16 формирует информацию для индикации названия многофункциональных кнопок ПОН 14, принадлежащих первой странице типовой ситуации. Эта информация в виде последовательного кода РТМ - 1609 с второго выхода БУН 16 поступает на вход БУИ ПОН 18, где зашифровывают номера знакоместа надписей рядом с многофункциональными кнопками. Этот сигнал с выхода БУИ ПОН 18 поступает на вход ПОН 14, где на заданных знакоместах табло 24 подсвечивают светодиодные матрицы и выделяют в виде надписей рядом с многофункциональными кнопками ПОН.
При нажатии любой из многорежимных кнопок ПОН 14 сигнал о ее включении в виде напряжения определенной величины (признак кнопки) поступает с выхода группы выходов ПОН 14 на соответствующий вход группы входов БН 15 (в настоящем примере ПОН имеет 24 выхода, а БН 15 соответственно 24 входа). Комбинацию входных сигналов БН 15 в виде напряжения на одном из входов и его отсутствия на остальных преобразуют в БН 15 в цифровой код, состоящий из "0" и "1". Этот сигнал цифрового кода с выхода БН 15 в виде последовательною кода РТМ-1609 поступает на третий вход БУН 16, где его преобразуют к виду, используемому в линии передачи информации в соответствии с ГОСТ 26765,52-87 (ему присваивают адреса потребителей, вводят признак четности и т.п.) и через выход второго оконечного устройства 17 он по сигналу от контроллера поступает через линию передачи информации потребителям данной кнопки.
Факт нажатия многофункциональной кнопки на ПОН 14 фиксирует БУН 16. В течение 0,5 с (счетчик времени (на фиг. не показан) организован в БУН 16) от потребителей на вход ОУ2 17 приходят ответные "квитанции" в виде посылаемого кода, но с признаком "квитанции", которые поступают в БУН 16, где их суммируют, и при наличии суммарной квитанции признак кнопки преобразуют в сигнал цифрового кода РТМ-1609, который поступает на вход БУИ ПОН 18.
БУИ ПОН 18 в кодовом виде зашифровывает номер знакоместа (табло 24) обрамления нажатой кнопки (20.1-20.10) и соответствующий сигнал, поступающий с выхода БУИ ПОН 18 на вход ПОН 14, "поджигает" светодиодные матрицы.
"Подсказки" потребителей, то есть информацию, высвечиваемую на строках ИР 13, поступающую с первого выхода БУН 16, преобразуют в БУИР 12 и высвечивают на ИР 13.
Нажатием кнопок перелистывания страниц в БУН 16 формируют номер нужной страницы, подготавливают информацию для надписей многофункциональных кнопок этой страницы, которая в виде кода РТМ-1609 поступает на вход БУИ ПОН 18 и далее в ПОН 14. Кроме того, для изменения номера страницы на ИР 13 с первого выхода БУН 16 информация поступает на второй вход БУИР 12 и далее на вход индикатора 13 режимов.
При вводе числовых значений параметров, задаваемых на ПОН 14, нажимают многорежимную кнопку с названием вводимой величины, на цифровом наборном поле набирают цифры, соответствующие выбираемым параметрам. Сигналы с многорежимной кнопки и кнопок наборного поля поступают на соответствующие выходы группы выходов ПОН 14 и в виде напряжений определенной величины - на входы группы входов БН 15, где их преобразуют в код РТМ-1609, который с выхода БН 15 поступает на третий вход БУН 16 и с первого выхода БУН 16 поступает на второй вход БУИР 12, где в кодовом виде зашифровывают информацию для индикации.
По сигналу с выхода БУИР 12 на вход ИР 13 на ИР 13 выдают изображение набранных цифр и название вводимой с ПОН 14 величины. В случае ошибки в процессе набора цифр последнюю цифру сбрасывают нажатием кнопки СБРОС, по сигналу с которой в БУН 16 (аналогично вышеизложенному при нажатии кнопки СБРОС подают напряжение на соответствующий вход группы входов БН 15), вырабатывают признак сброса последней цифры, который далее в виде соответствующего кода РТМ - 1609 поступает на второй вход БУИ 12 и после преобразования в нем - на вход ИР 13, в котором снимают эту последнюю цифру.
При нажатии кнопки ВВОД на ПОН 14, сигнал с которой попадает в БУН 16 аналогично вышеизложенному, набранную величину в БУН 16 преобразуют к виду, соответствующему ГОСТ 26765. 52-87, и через второе оконечное устройство 17 она поступает в блоки системы.
В качестве пояснения работы системы некоторые из реализованных алгоритмов приведены в приложениях:
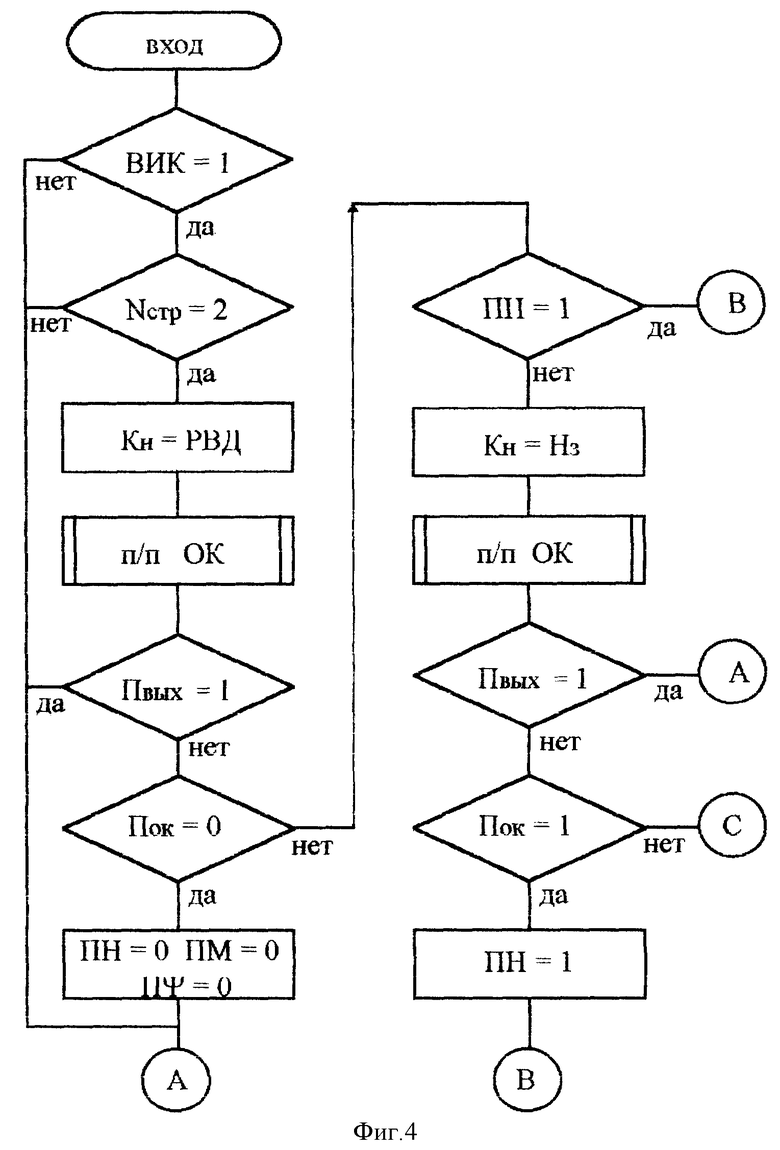
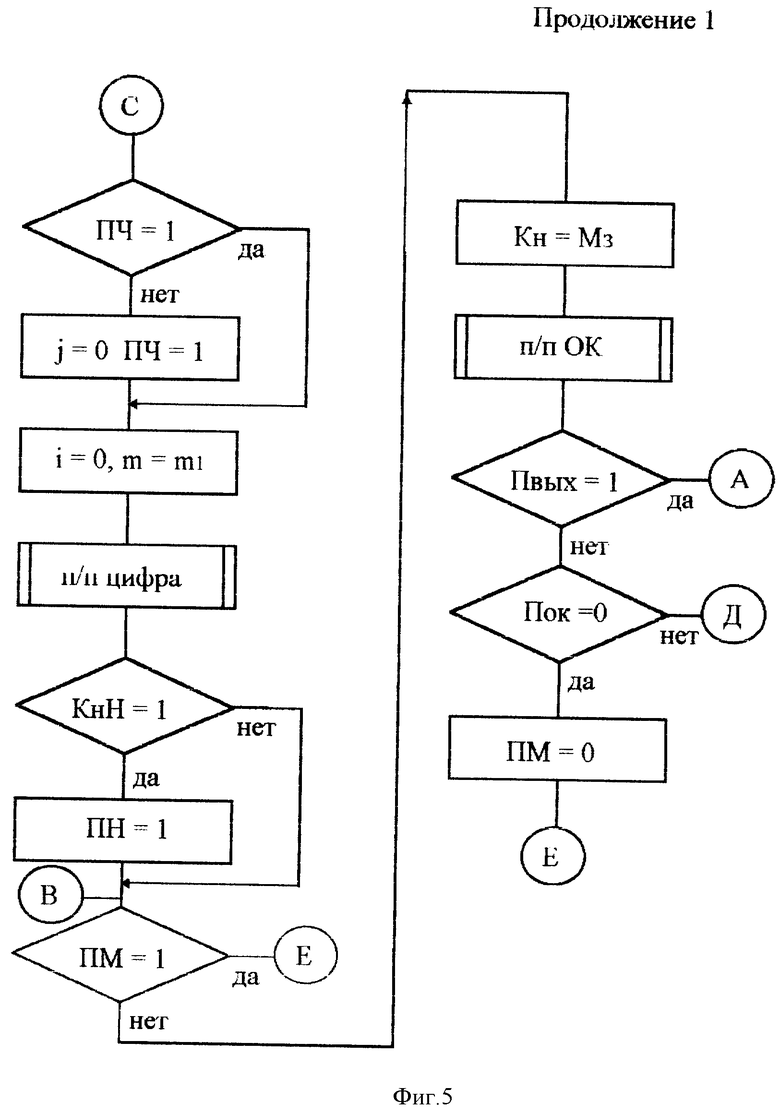
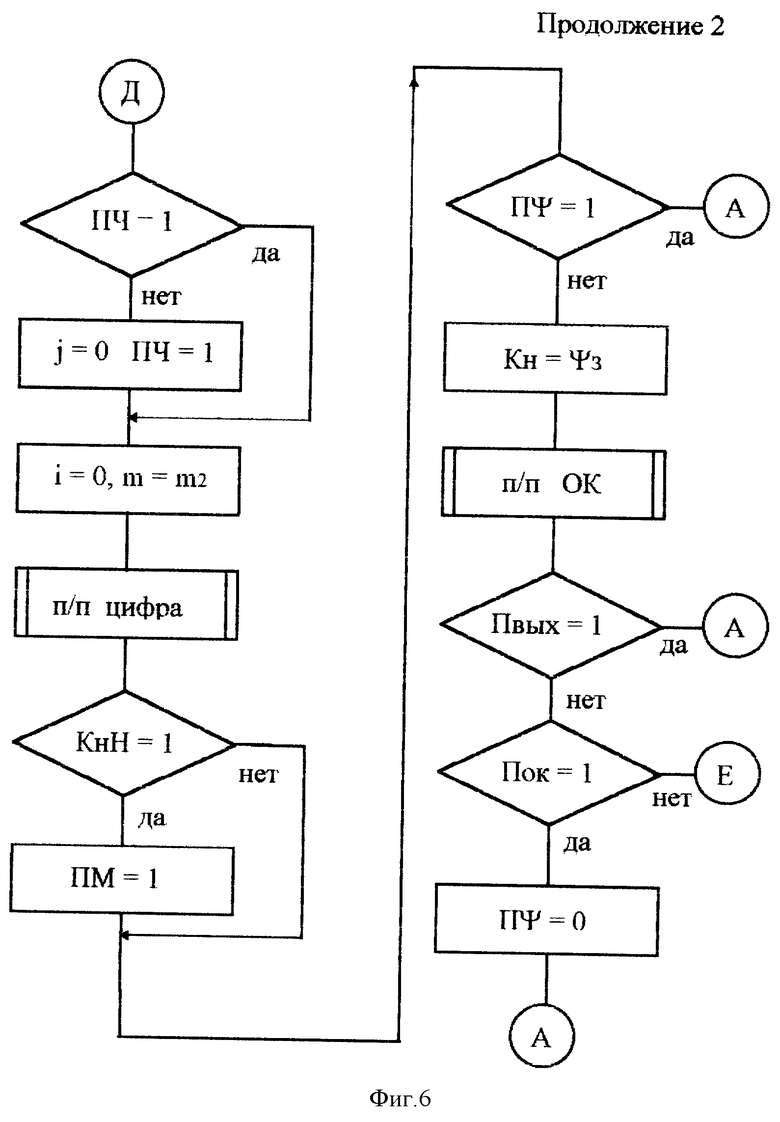
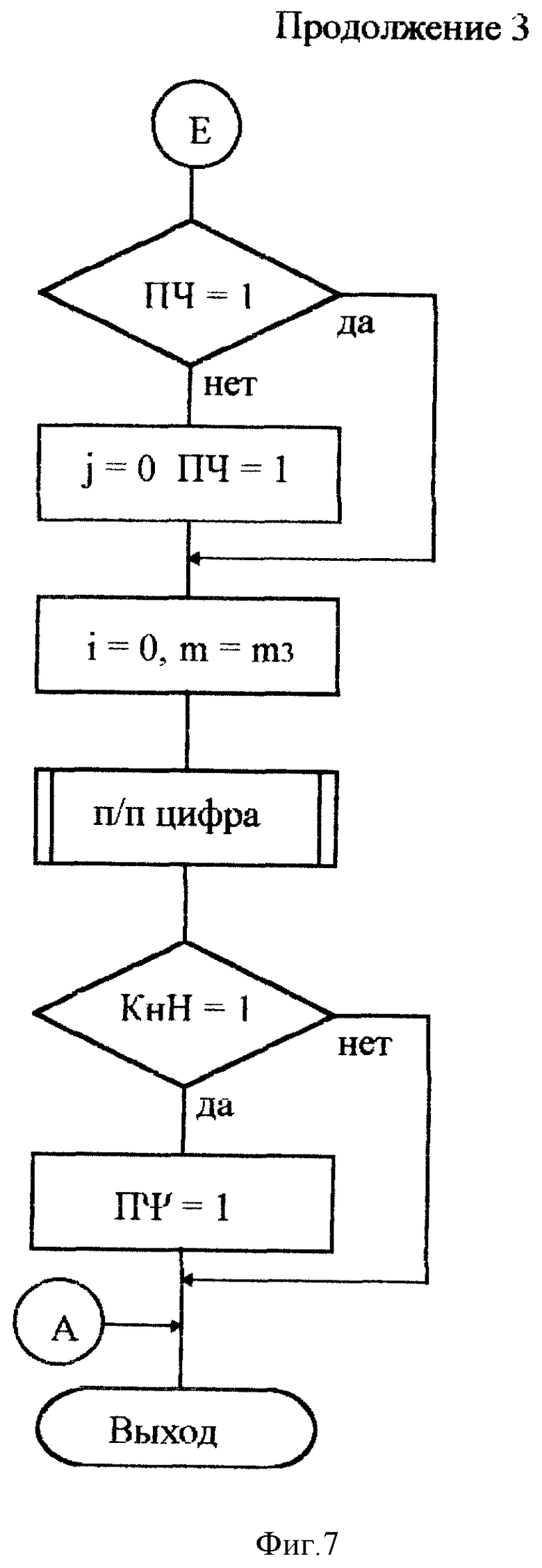
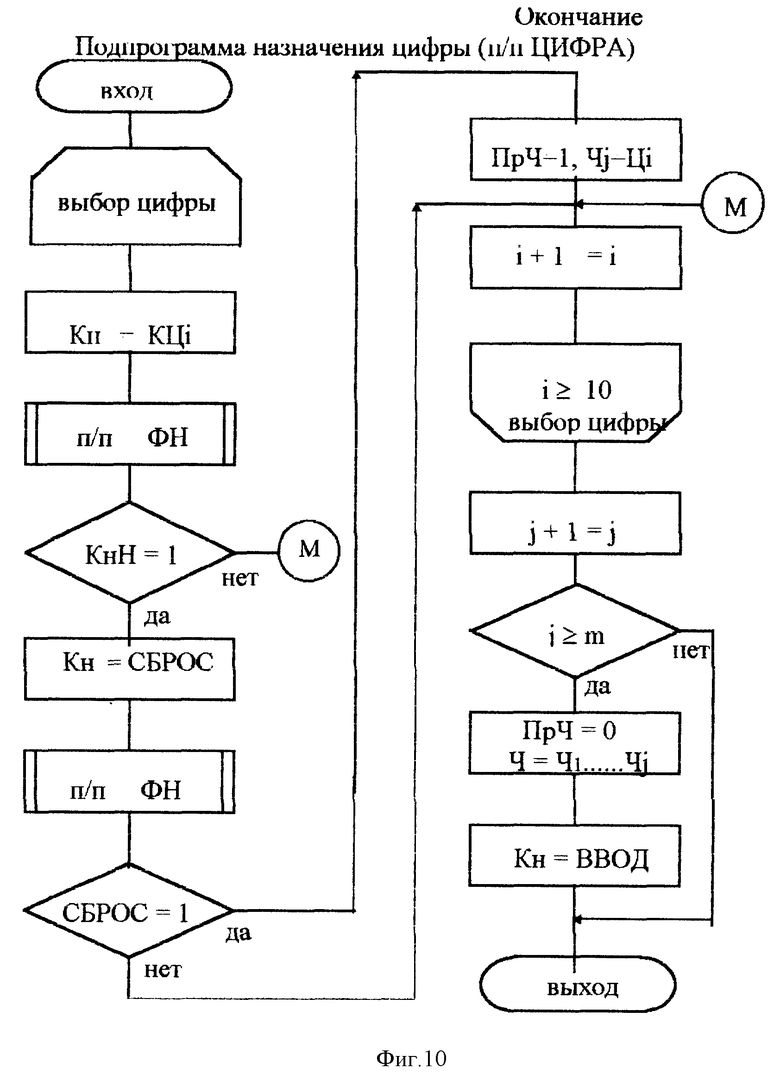
- алгоритм назначения в типовой ситуации выхода в информационный контакт с целью (ТС ВИК) заданных параметров на примере полета самолета Нз, Мз, Ψ3 (высота Нз заданная, число Маха Мз заданное, угол Ψ3 курса заданный), реализованный в БУН 16. Потребителем заданных параметров является БКНО 4 (см. блок-схемы алгоритмов на фиг. 4-10)
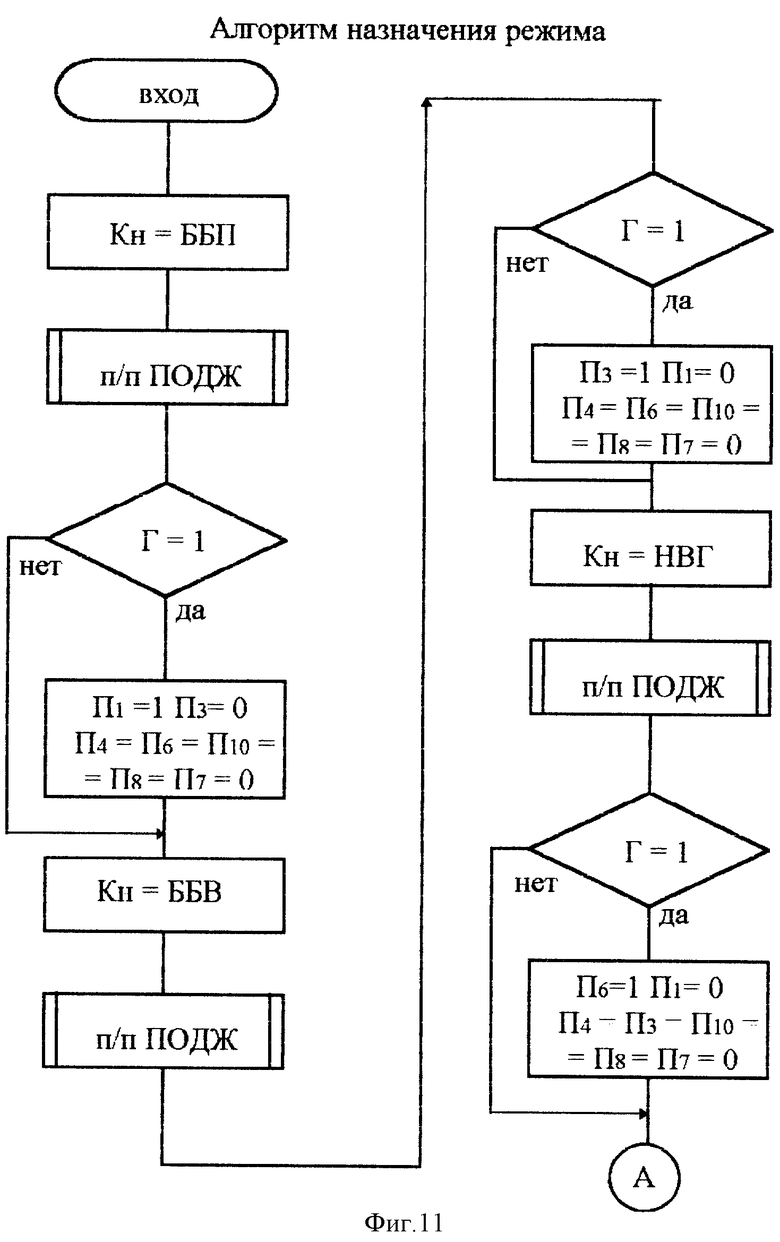
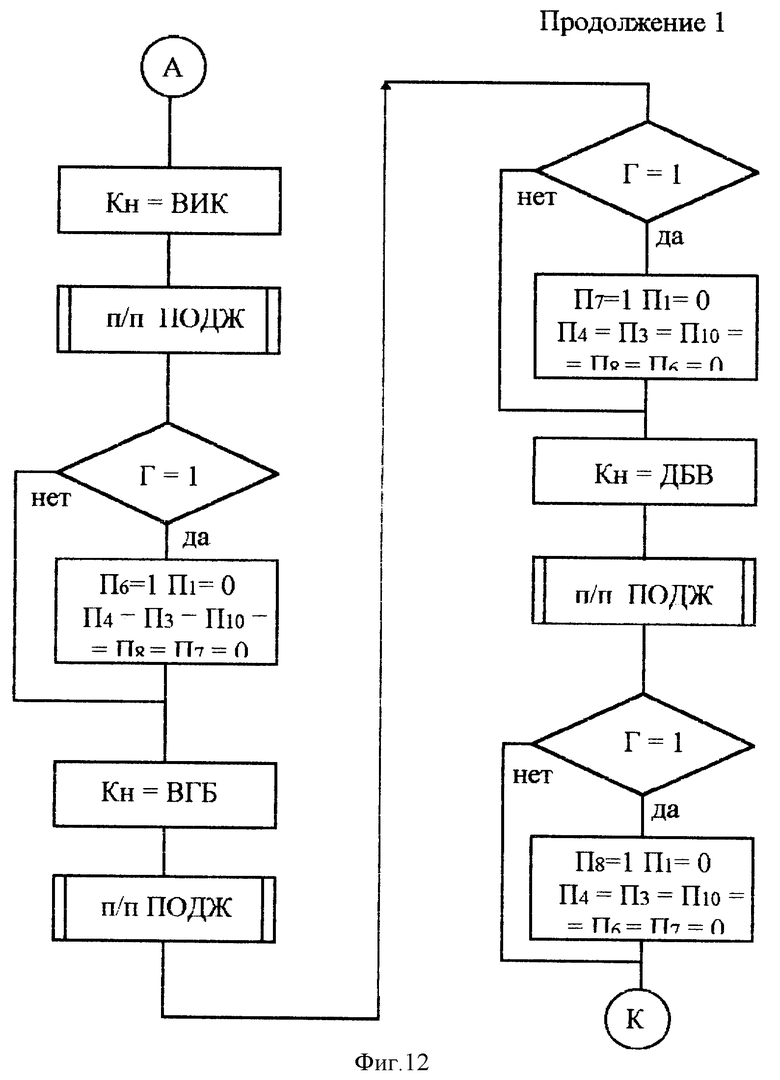
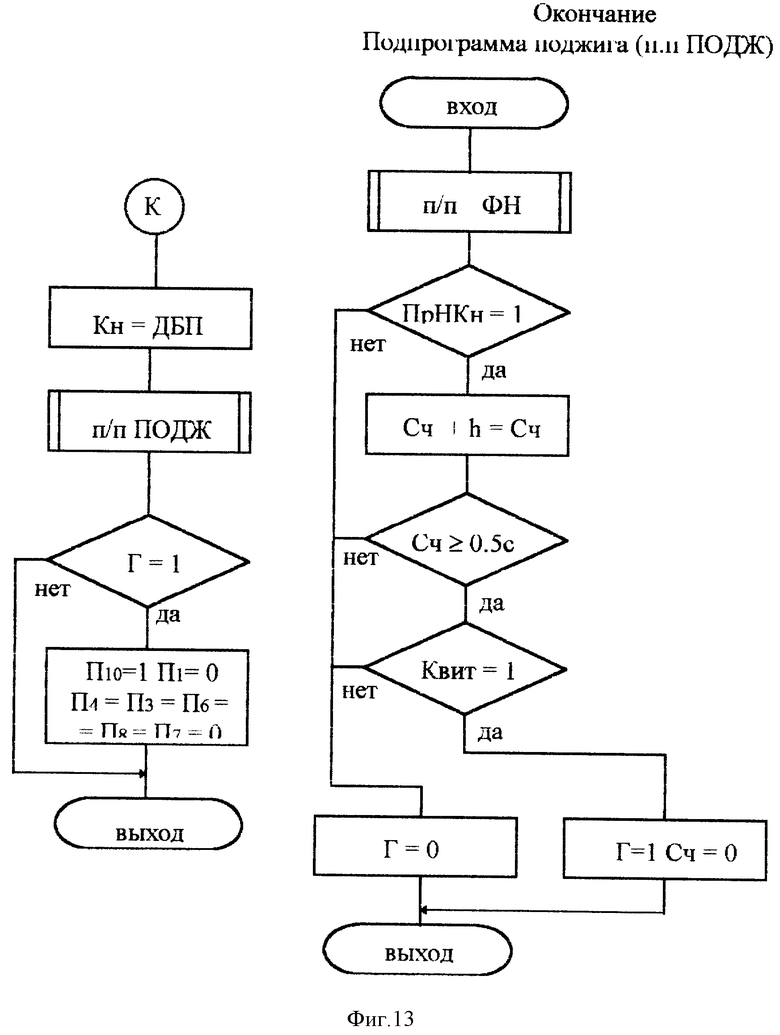
- алгоритм назначения режима, реализованный в БУР 10 и обеспечивающий "поджиг" одной из режимных кнопок на БУР 8 (см. фиг. 11-13);
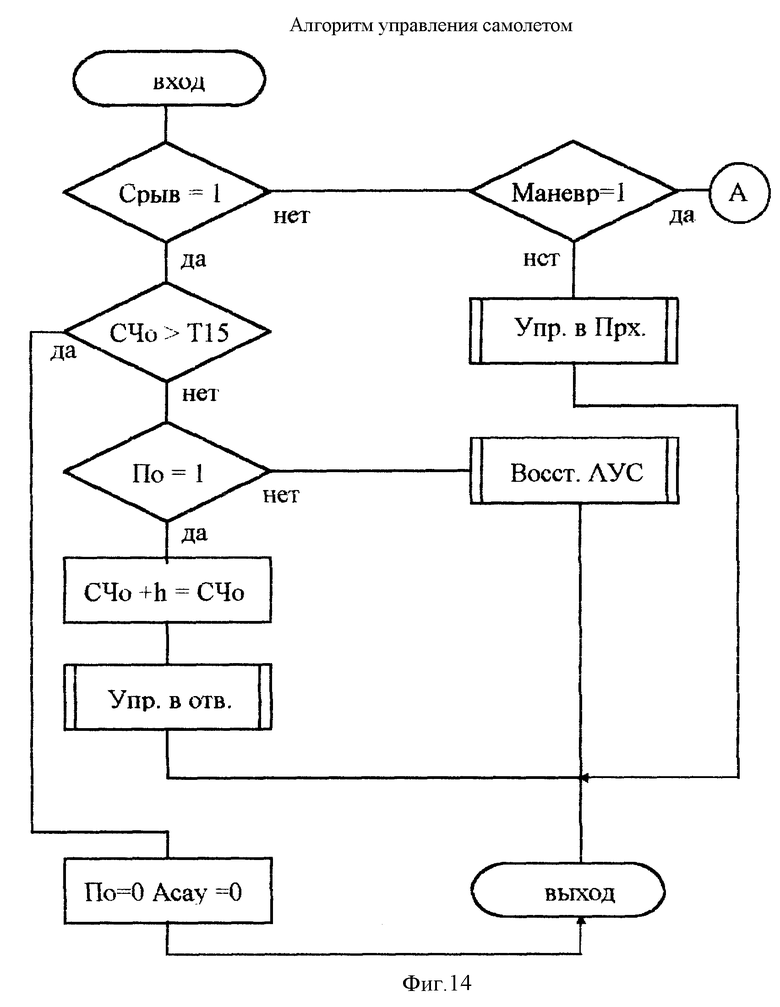
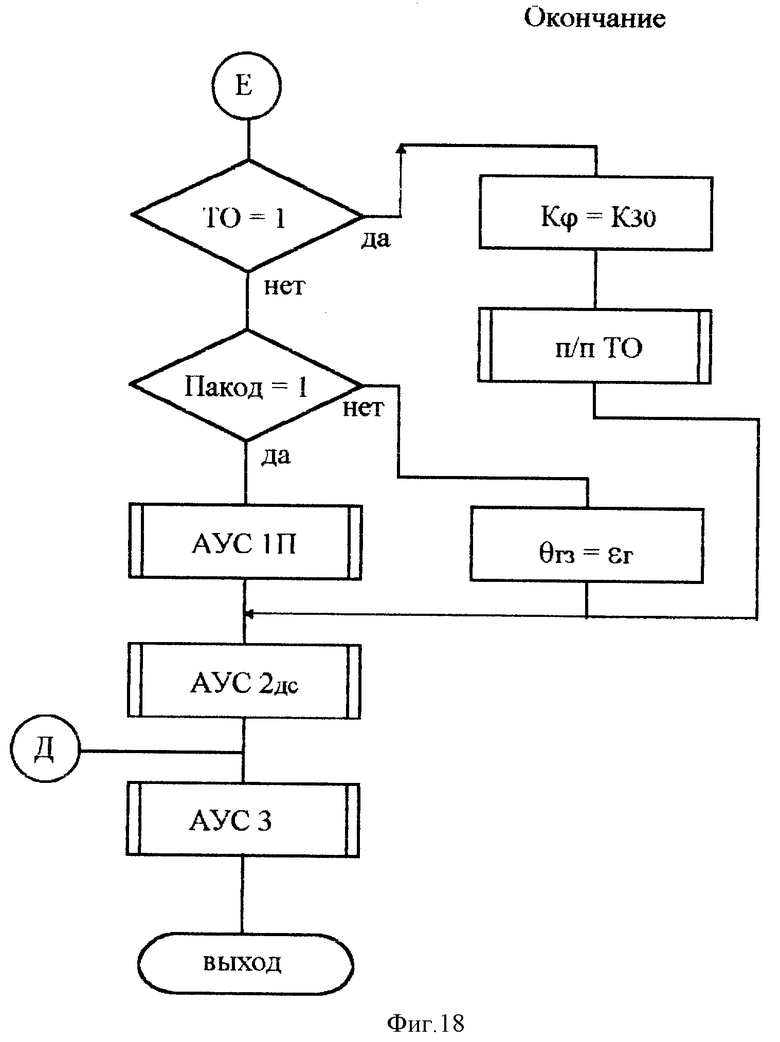
- алгоритм управления, например, самолетом, реализованный в БЦВМ 7 и учитывающий состояние кнопки МАНЕВР на ПОН 14 в ТС дальний бой воздушный (ДБВ) (см. фиг. 14-18).
Таким образом, работа с СУВ истребителя сводится к тому, что летчик, оценив обстановку в предстоящих боевых действиях, нажатием одной из режимных кнопок 19 пульта 8 задания режимов обозначает для себя выбор наиболее подходящей типовой ситуации, в ответ получает наблюдаемый рядом с многофункциональными кнопками 20 пульта 14 оперативной настройки набор напоминаний и предписаний, позволяющих успешно выполнить задание.
При обнаружении пели бортовыми средствами (см. фиг. 4-10) (ВИК) функционируют четыре многофункциональные кнопки. Это:
1) РВД - ручной ввод данных
2) Нз - высота заданная
3) Мз - число Маха заданное
4) Ψз - угол курса заданный
Нажатием кнопки РВД, одной из кнопок заданных параметров и набором группы цифр или одной цифры на цифровом наборном поле ПОН 14 пилот (оператор) вводит заданные параметры в БУН 16 для последующей их передачи в БКНО 4.
На блок-схеме алгоритма, реализованного в БУН 16, обозначено:
Кн - признак выбора конкретной кнопки;
РВД - выбор кнопки РВД;
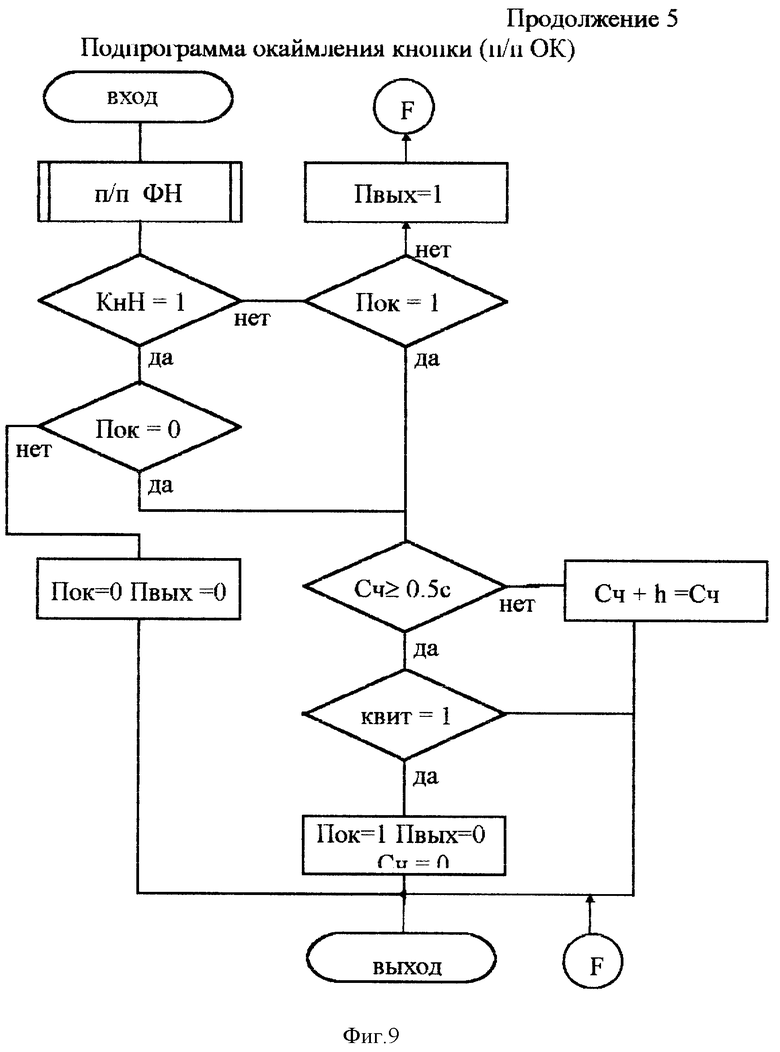
п/п ОК подпрограмма окаймления надписи рядом с кнопкой (далее окаймления кнопки);
Пвых - признак выхода из алгоритма;
Пок - признак окаймления кнопки;
ПН - признак передачи значения заданной высоты из БУН 16;
ПМ - признак передачи значения заданного числа Маха из БУН 16;
ПΨ - признак передачи значения заданного угла курса из БУН 16;
Нз - признак выбора кнопки Нз (заданной высоты);
ПЧ - признак числа;
j - номер цифры в заданном (набираемом на ПОН) числе;
m - количество цифр в заданном числе;
m1 - количество цифр в числе высоты заданной;
m2 - количество цифр в числе Маха заданного;
m3 - количество цифр в числе курса заданного;
i - номер цифры;
п/п цифра - подпрограмма, фиксирующая нажатие конкретной кнопки на цифровом наборном поле;
Мз - признак выбора кнопки Мз;
Ψз - признак выбора кнопки Ψз;
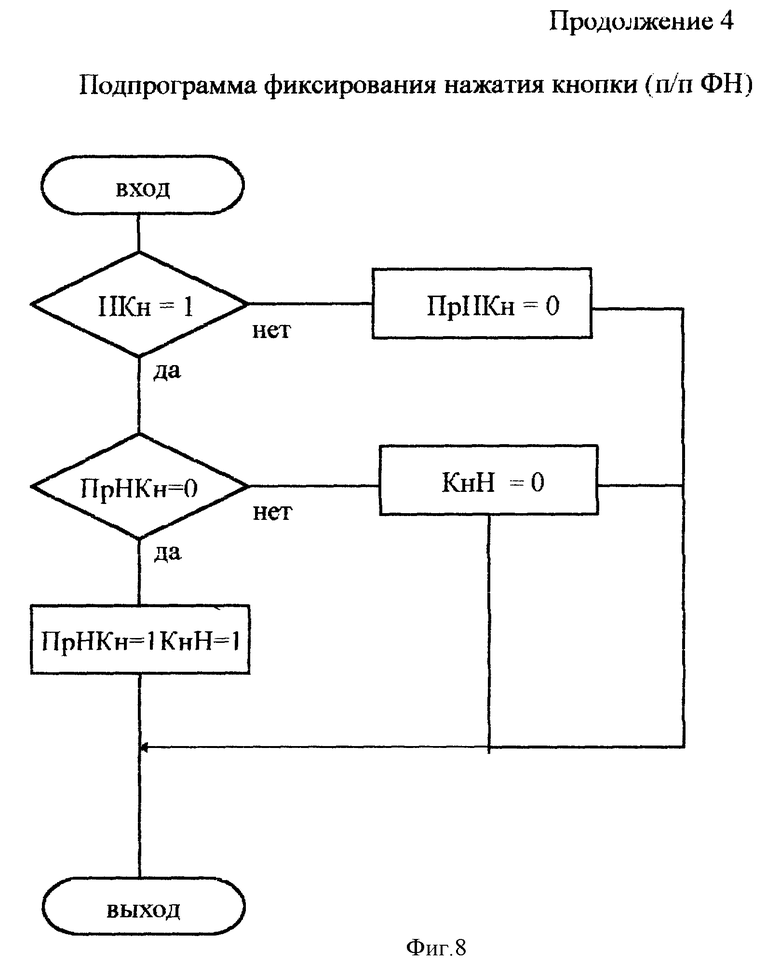
п/п ФН - подпрограмма фиксирования нажатия кнопки;
КнН - признак, что кнопка нажата;
НКн - признак нажатия (прикасания) к кнопке;
ПpHКн - промежуточный признак, фиксирующий факт нажатия кнопки;
Сч - счетчик времени до поступления ответной квитанции;
квит - признак поступления ответной квитанции;
h - шаг счета алгоритма;
КЦi - кнопка на цифровом наборном поле;
СБРОС - кнопка "СБРОС";
Чj - набранная j-ая цифра в числе;
Цi - набранная i-ая цифра;
Ч - набранное число;
ВВОД - кнопка "ВВОД".
Нажатием режимной кнопки на пульте задания режимов ПЗР 8 пилот (оператор) назначает одну из конкретных типовых ситуаций, выбирая тем самым режим работы СУВ. Алгоритм назначения режима (см. фиг. 11 - 13) реализован в блоке управления режимами БУР 10.
В блок-схеме алгоритма назначения режима приняты следующие условные обозначения:
Кн - признак выбора конкретной кнопки;
ББП - выбор кнопки ББП;
п/п ПОДЖ - подпрограмма подсвечивания ("поджига") кнопки;
Г - признак подсвечивания ("горения") режимной кнопки;
П1 - признак назначения режима, обозначенного кнопкой 1 ПЗР (режима ББП);
ББВ - выбор кнопки ББВ;
П3 - признак назначения режима, обозначенного кнопкой 3 ПЗР (режима ББВ);
НВГ - выбор кнопки НВГ;
П4 - признак назначения режима, обозначенного кнопкой 4 ПЗР (режима НВГ);
ВИК - выбор кнопки ВИК;
П6 - признак назначения режима, обозначенного кнопкой 6 ПЗР (режима ВИК);
ВГБ - выбор кнопки ВГБ;
П7 - признак назначения режима, обозначенного кнопкой 7 ПЗР (режима ВГБ);
ДБВ - выбор кнопки ДБВ;
П8 - признак назначения режима, обозначенного кнопкой 8 ПЗР (режима ДБВ);
ДБП - выбор кнопки ДБП;
П10 - признак назначения режима, обозначенного кнопкой 10 ПЗР (режима ДБП);
п/п ФН - подпрограмма фиксирования нажатия кнопки (см. Приложение 2);
ПpHКн - признак (факт) нажатия кнопки;
Сч - счетчик времени;
Квит - признак поступления квитанции.
Алгоритм управления самолетом (см. фиг. 14-18) - диспетчер управления самолетом (АУС) в типовой ситуации ДБВ, который в зависимости от предписаний пилота (оператора) и состояния СУВ подключает частные алгоритмы управления, реализующие различные траектории полета самолета. При нажатой на ПОН кнопке МАНЕВР функционируют алгоритмы управления дуэльной ситуации, реализующие специальные наступательные и оборонительные маневры.
В алгоритме управления самолетом приняты следующие условные обозначения:
Срыв - срыв сопровождения БРЛС или БОЛС;
Маневр - сигнал с кнопки ПОН;
СЧо - счетчик времени выполнения самолетом отворота безопасности;
По - признак отворота безопасности;
h - шаг счета;
Упр. в отв. - алгоритмы управления самолетом (АУС) при отвороте безопасности;
Упр. в Прх. - алгоритмы управления самолетом при перехвате воздушной цели;
Восст. АУС - алгоритмы восстановления управления самолетом при срыве сопровождения;
Асау - признак передачи управляющих сигналов в систему автоматического управления самолетом (САУ);
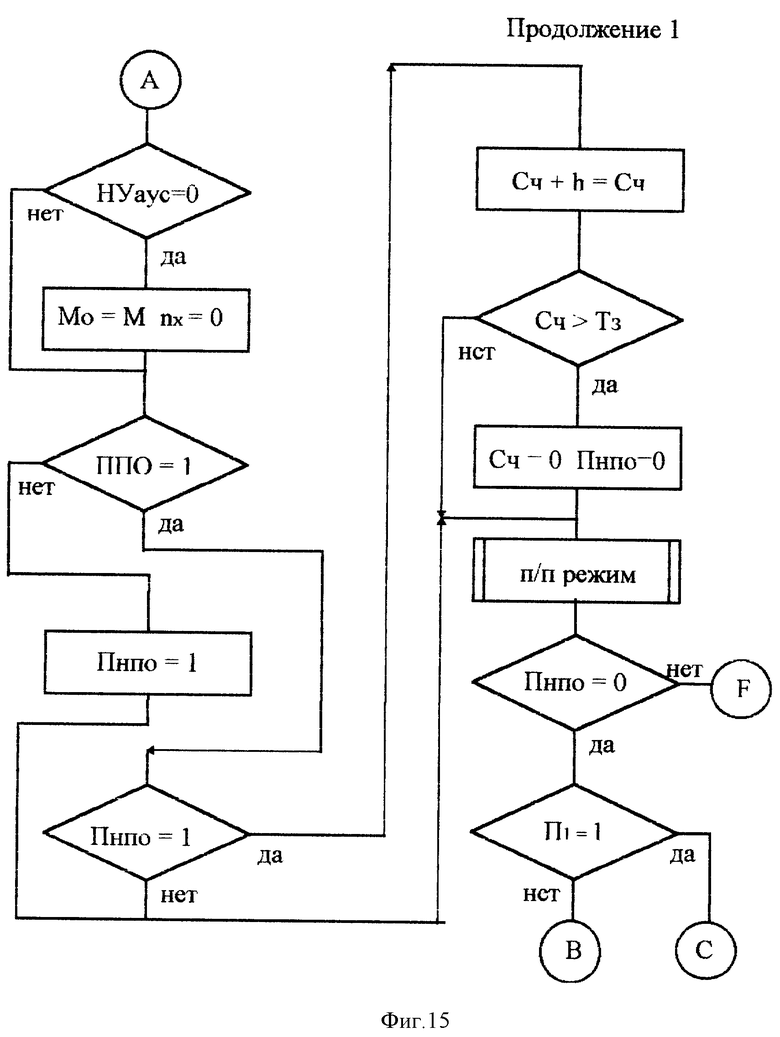
НУаус - признак задания начальных условий в АУС;
Мо - начальное число Маха;
М - число Маха;
nx - продольная перегрузка;
ППО - полное приборное обеспечение;
Пнпо - признак неполного приборного обеспечения;
Сч - счетчик задержки времени переключения с полного на неполное приборное обеспечение;
п/п режим - подпрограмма выбора одного из специальных алгоритмов управления;
П1 - признак задержки перехода с алгоритмов при ППО на алгоритмы при НПО;
П2 - признак задержки перехода с алгоритмов при НПО на алгоритмы при ППО;
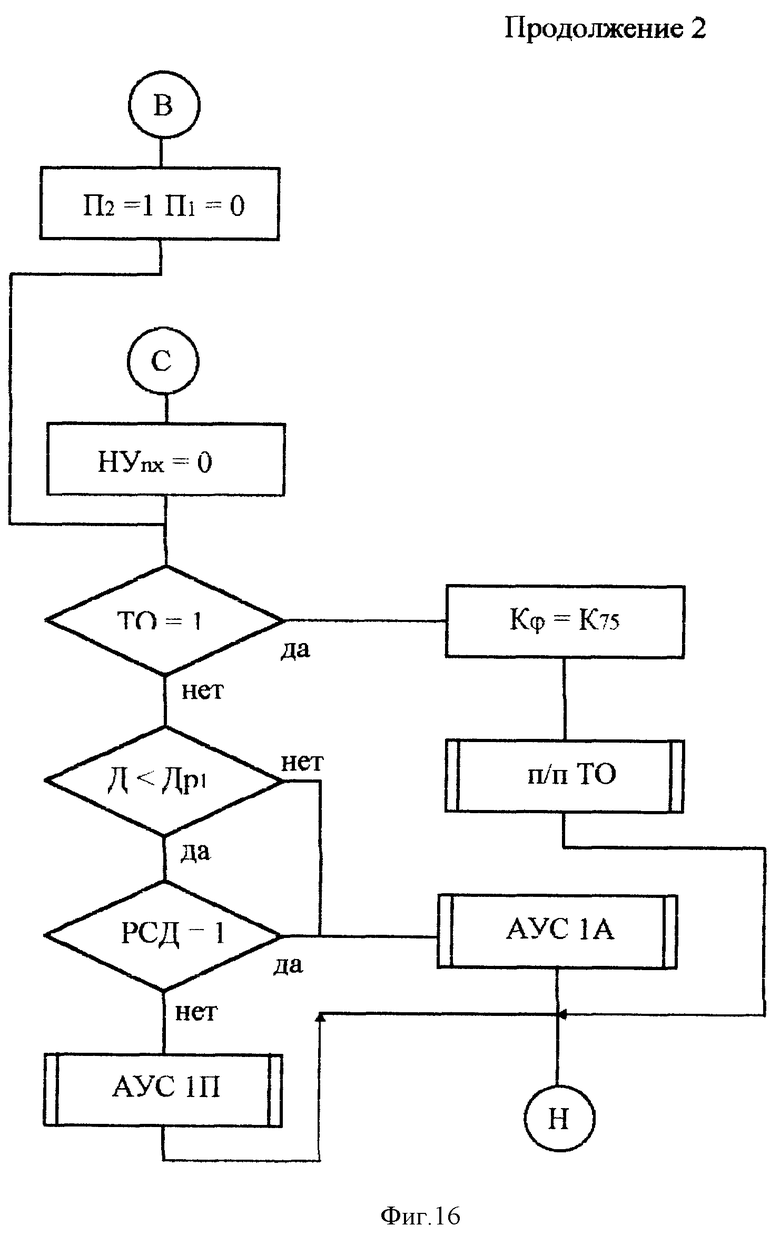
НУnx - признак задания начальных условий в подпрограмму nx;
ТО - тактический отворот (специальный маневр);
Д - дальность до цели;
Др1 - разрешенная дальность пуска;
РСД - признак ракеты средней дальности;
АУС 1П - АУС, реализующий метод наведения по кривой погони в горизонтальной плоскости;
Kϕ - коэффициент, используемый в п/п ТО;
К75 - константа, используемая в п/п ТО;
п/п ТО - подпрограмма, реализующая маневр тактического отворота;
АУС 1А - АУС, реализующий метод наведения по кривой атаки в горизонтальной плоскости;
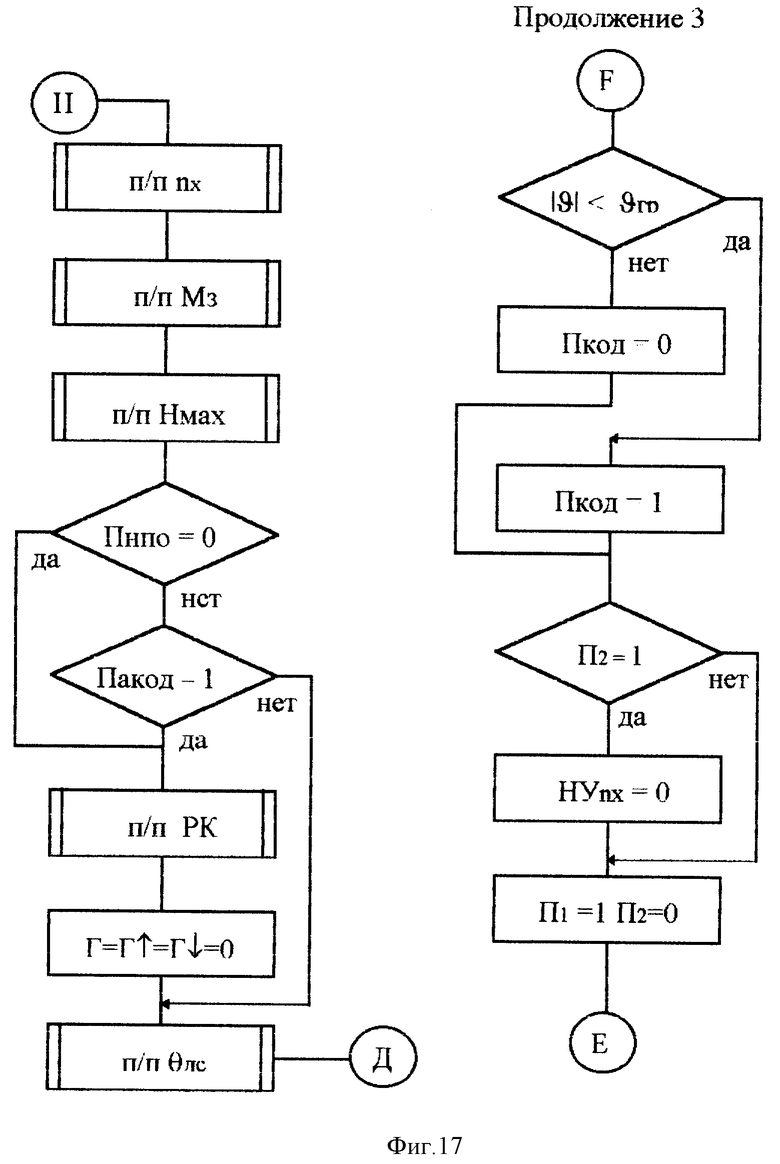
п/п nx - подпрограмма вычисления продольной перегрузки;
п/п Мз - подпрограмма вычисления заданного) числа Маха;
п/п Нмах - подпрограмма вычисления максимальной высоты;
Пакод - признак того, что алгоритм косвенного определения дальности выдает достоверную информацию;
п/п РК - подпрограмма разовых команд;
Г - признак прицельной горки; - горка вверх;
- горка вверх; - горка вниз;
- горка вниз;
п/п Θ дс - подпрограмма вычисления заданного угла наклона траектории в специальном алгоритме дуэльной ситуации;
ϑ - угол тангажа;
ϑгр - граничное значение угла тангажа;
Пкод - признак включения алгоритма косвенного определения дальности;
АУС 2дс - АУС в дуэльной ситуации в вертикальной плоскости;
АУС 3 - алгоритм вычисления управляющих сигналов;
К30 - константа;
Θгз - угол поворота траектории;
εг - угол азимута.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 1988 |
|
RU2024818C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 2010 |
|
RU2439461C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2551267C1 |
| ТРЕНАЖЕР ВОЗДУШНОГО БОЯ | 2005 |
|
RU2297674C2 |
| Система интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника | 2022 |
|
RU2789042C1 |
| Система интеллектуальной поддержки командира группы истребителей сопровождения для этапа полета "Маршрут-1" | 2019 |
|
RU2724573C1 |
| ПУЛЬТ ВЫБОРА СИСТЕМ | 2004 |
|
RU2270141C2 |
| СПОСОБ ЭЛЕКТРОННОГО УПРАВЛЕНИЯ СИСТЕМАМИ САМОЛЕТНОГО ОБОРУДОВАНИЯ ПОСРЕДСТВОМ КУРСОРА | 2004 |
|
RU2263046C1 |
| ЦЕНТРАЛЬНЫЙ СИГНАЛЬНЫЙ ИНДИКАТОР ВОЗНИКНОВЕНИЯ АВАРИЙНОЙ ИЛИ СЛОЖНОЙ СИТУАЦИИ НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2235665C2 |
| Система управления вооружением летательных аппаратов | 2021 |
|
RU2780716C1 |
Изобретение относится к средствам, обеспечивающим поражение целей, и может быть использовано при разработке систем управления вооружением, например истребителей. Технический результат - повышение оперативности действий летчика в экстремальных ситуациях. Сущность изобретения состоит в том, что в известный состав оборудования, включающий бортовые РЛС, оптиколокационную станцию, комплексы аппаратуры наведения и навигационного оборудования, и комплекс радиотелеметрической связи и целераспределения, индикаторы прицельной, навигационной и пилотажной информации, а также вычислительную систему, связывающую перечисленные устройства, введены пульты задания режимов и индикатором режимов, оперативной настройки этой системы на любую из выбираемых летчиком типовых ситуаций с применением вооружения, блоки режимов, управления режимами, управления индикатором режимов, настройки, управления настройкой, управления индикацией пульта оперативной настройки, связанные между собой и через свои оконечные устройства с бортовой цифровой вычислительной машиной. 18 ил.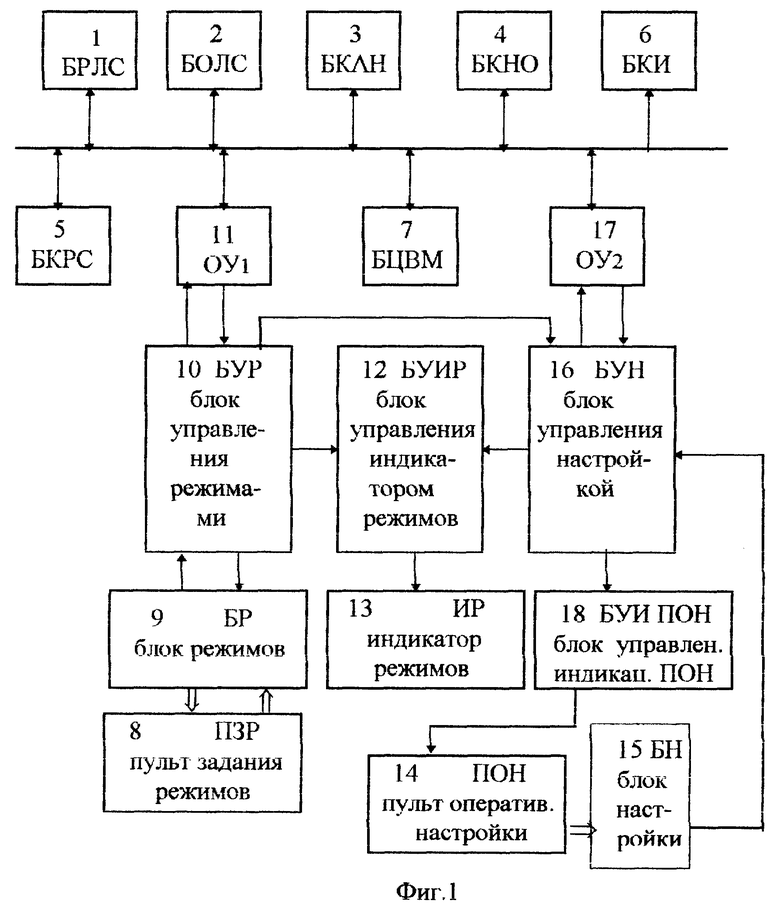
Система управления вооружением летательного аппарата, например истребителя, включающая бортовые радиолокационную и оптиколокационную станции, бортовые комплексы аппаратуры наведения, навигационного оборудования, индикаторы прицельной, навигационной и пилотажной информации и комплекс радиотелеметрической связи и целераспределения в групповом бою, через линию передачи информации подключенные к соответствующим входам-выходам бортовой цифровой вычислительной машины, отличающаяся тем, что в нее введены два оконечных устройства, пульпы задания режимов и оперативной настройки, блоки режимов, управления режимами, управления индикатором режимов, настройки, управления настройкой и управления индикацией пульта оперативной настройки и индикатор режимов, причем пульт задания режимов группой входов соединен с группой выходов, а группой выходов подключен к группе входов блока режимов, выход которого соединен с первым входом блока управления режимами, который первым выходом подключен к входу первого оконечного устройства, вторым выходом соединен с входом блока режимов, третьим выходом подключен к первому входу блока управления индикатором режимов, а вторым входом соединен с выходом первого оконечного устройства, своим входом-выходом через линию передачи информации подключенного к соответствующему входу-выходу бортовой цифровой вычислительной машины, вход индикатора режимов соединен с выходом блока управления индикатором режимов, вторым входом подключенного к первому выходу блока управления настройкой, первым входом соединенного с четвертым выходом блока управления режимами, а вторым и третьим входами подключенного к выходу второго оконечного устройства и выходу блока настройки соответственно, а вторым и третьим выходами соединенного, соответственно, с входом блока управления индикацией пульта оперативной настройки и входом второго оконечного устройства, входом-выходом через линию передачи информации подключенного к соответствующему выходу-входу бортовой цифровой вычислительной машины, при этом блок управления индикацией пульта оперативной настройки выходом соединен со входом пульта оперативной настройки, группой выходов подключенного к группе входов блока настройки.
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 1988 |
|
RU2024818C1 |
| DE 3630701, А1, 19.03.1987 | |||
| АВТОТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2542863C1 |
| Устройство для формирования серий импульсов | 1985 |
|
SU1307548A1 |
| US 4312262, А, 26.01.1982. | |||

