Изобретение относится к области авиационного тренажеростроения и может применяться при подготовке летчиков самолетов истребительной авиации, отработке бортовой аппаратуры и отработке методики обучения летчиков ведению воздушного боя.
Известна система визуализации для стенда моделирования с обзорно-прицельным устройством, описанное как изобретение - Патент №2202829 от 05.06.2001 г. Авторы Купервассер Ю.И. и др. Данное изобретение принимается за прототип. Приведенная система визуализации для стенда моделирования с обзорно-прицельным устройством позволяет производить моделирование ближнего воздушного боя сверхманевренных истребителей с использованием реальных обзорно-прицельных устройств.
Укрупненно, с выделением основных узлов применительно к задачам наземной подготовки летчиков ведению воздушного боя, отработки бортовой аппаратуры, стенд моделирования управления самолетом с системой визуализации и обзорно-прицельным устройством (индикатором "на стекле") включает: органы управления самолетом; вычислитель динамики самолета и цели; вычислительные средства визуализации; средства визуализации; индикатор "на лобовом стекле" (ИЛС).
Однако данный стенд моделирования с системой визуализации и обзорно-прицельным устройством не позволяет в полной мере проводить обучение и тренировки летчиков ведению группового воздушного боя в приближенных к условиям реального полета, когда необходимо ведение как ближнего, так и дальнего воздушного боя с наведением и управлением авиационных управляемых ракет (АУР) на поражение маневрирующего самолета противника, с введением всего многообразия условий и способов ведения воздушного боя.
Целью предлагаемого изобретения является обеспечение необходимыми устройствами для обучения летчиков самолетов-истребителей выполнению боевых задач: отработки прицеливания по стационарным и подвижным наземным и воздушным целям с использованием всех боевых систем самолета, имитацию условий радиоэлектронного противодействия (РЭП), включая как постановку помех противником, так и использование собственных средств радиоэлектронной борьбы (РЭБ), отработки взаимодействия членов экипажа или экипажей в бою с учетом реальной тактической обстановки, отработку экипажем индивидуальных и групповых тактических навыков ведения боевых действий с использованием виртуальных партнеров и противников, комплексную оценку эффективности выполнения боевых задач.
Поставленная цель достигается тем, что в известное устройство Патент №2202829 от 05.06.2001 г. - прототип, содержащим последовательно соединенные органы управления самолетом 1, вычислитель динамики самолета и цели 2, вычислительные средства визуализации 3, средства визуализации 4, индикатор "на лобовом стекле" (ИЛС) 5, дополнительно введены рабочее место летчика самолета-истребителя 6, рабочее место летчика самолета-противника 7, блок бортовых систем самолета-истребителя 8, блок бортовых систем самолета-противника 9, модель движения самолета-истребителя 10, модель движения авиационной управляемой ракеты (АУР) 11, модель движения самолета-противника 12, блок тактической обстановки 13, блок радиолокационной обстановки 14, блок поражающей обстановки 15, блок визуальной обстановки 16, блок объективной оценки обученности 17, блок авиационного катапультного устройства (АКУ) 18, пульт контроля и управления тренировкой 19, первый выход которого соединен с входом блока тактической обстановки 13, выход которого параллельно соединен с первым входом блока радиолокационной обстановки 14, с первым входом модели движения самолета-истребителя 10, с первым входом модели движения АУР 11, с первым входом модели движения самолета-противника 12, третий выход которой параллельно соединен со вторым входом блока визуальной обстановки 16, со вторым входом блока поражающей обстановки 15, со вторым входом блока радиолокационной обстановки 14, третий выход которого связан со вторым входом рабочего места летчика самолета-истребителя 6, первый вход которого соединен с выходом индикатора "на лобовом стекле" 5, а четвертый выход пульта контроля и управления тренировкой 19 соединен с шестым входом рабочего места летчика самолета-истребителя 6, четвертый выход которого соединен со вторым входом блока бортовых систем самолета-истребителя 8, третий выход которого соединен со вторым входом модели движения самолета-истребителя 10, третий выход которой параллельно соединен с четвертым входом блока радиолокационной обстановки 14 и с первым входом блока визуальной обстановки 16, третий выход которого параллельно соединен с входом рабочего места летчика самолета-противника 7 и с третьим входом рабочего места летчика самолета-истребителя 6, пятый выход которого соединен с первым входом блока авиационного катапультного устройства 18, третий выход которого соединен со вторым входом модели движения АУР 11, третий выход которой соединен с первым входом блока поражающей обстановки 15, третий выход которого соединен со входом блока объективной оценки обученности 17, выход которого соединен с третьим входом пульта контроля и управления тренировкой 19, второй выход которого соединен с первым входом блока бортовых систем самолета-истребителя 8, четвертый выход которого соединен со вторым входом блока авиационного катапультного устройства 18, а выход рабочего места летчика самолета-противника 7 соединен с входом блока бортовых систем самолета-противника 9, выход которого соединен со вторым входом модели движения самолета-противника 12.
На фиг.1 представлена структурная схема тренажера воздушного боя. На фиг.1 обозначены:
1 - органы управления самолетом,
2 - вычислитель динамики самолета и цели,
3 - вычислительные средства визуализации,
4 - средства визуализации,
5 - индикатор "на лобовом стекле" (ИЛС),
6 - рабочее место летчика самолета-истребителя,
7 - рабочее место летчика самолета-противника,
8 - блок бортовых систем самолета-истребителя,
9 - блок бортовых систем самолета-противника,
10 - модель движения самолета-истребителя,
11 - модель движения авиационной управляемой ракеты (АУР),
12 - модель движения самолета-противника,
13 - блок тактической обстановки,
14 - блок радиолокационной обстановки,
15 - блок поражающей обстановки,
16 - блок визуальной обстановки,
17 - блок объективной оценки обученности,
18 - блок авиационного катапультного устройства (АКУ),
19 - пульт контроля и управления тренировкой.
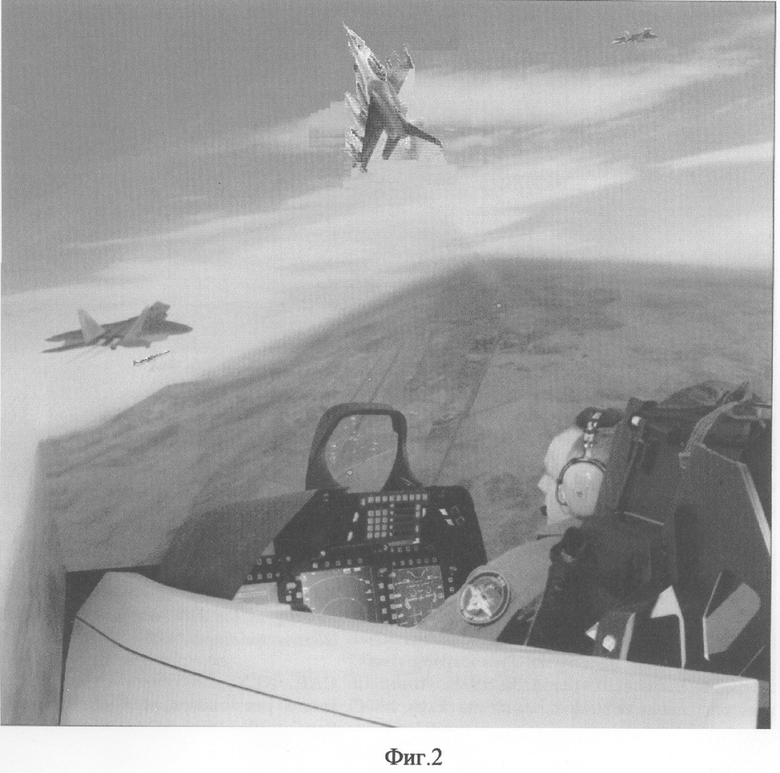
Рабочее место летчика самолета-истребителя 6 представляет геометрически подобную кабину со штатными органами управления самолетом (ручка управления самолетом (РУС), ручка управления двигателями (РУД), педали и др.); с центральными приборными досками и боковыми панелями управления, оснащенными органами управления самолетом и вооружением, штатными или тренажерными приборами наблюдения и отображения информации в части ведения воздушного боя (индикатор "на лобовом стекле" ("ИЛС"), многофункциональные индикаторы (МФИ) и др.).
Рабочее место летчика самолета-истребителя приведено на фиг 2.
Рабочее место летчика самолета-противника 7 состоит или из макета кабины самолета-противника с органами управления и приборами отображения, или фрагмента кабины, а в качестве органов управления используется джойстик.
Вспомогательные рабочие места самолетов-истребителей и самолетов-противников являются дополнительными средствами ведения воздушного боя.
Блок бортовых систем самолета-истребителя 8 включает следующие основные модели: модель топливной системы, модель двигателей, модель радиосвязи, модель пилотажно-навигационной системы, модель бортового цифрового вычислителя, обеспечивающие отработку на тренажере задачу воздушного боя.
Математическое описание блока представляется в виде следующего выражения:
Р={X, Y, D, U, R(D), F(R), N},
где Р - оператор, однозначно выражающий состояние агрегата в момент времени t,
X, Y - множество входных и выходных параметров агрегата,
D={D, D, D} - множество промежуточных параметров,
U={U, U, U} - множество характеристик данных (признаков),
R(D)={R(D), R(D),...R(D)} - множество отношений на множестве элементарных данных (признаков),
N={N, N,...N} - множество экземпляров данных (признаков) в отношениях,
F(R)={F(R), F(R),...F(R)} - множество функциональных зависимостей между отношениями.
Характеристика элементарных данных (признаков) структуры могут быть заданы кортежем вида U = (<вид представления>, <диапазон изменения>, <значение>).
Переход агрегата из одного состояния в другое определяется поступлением входных сигналов, окончанием выполненной операции преобразования структур данных и типом события, возникшего по окончании операции.
Блок бортовых систем самолета-противника 9 состоит из модели системы управления самолетом, модели топливной системы, модели двигательной системы, на вход блока поступают сигналы от органов управления самолетом-противника, на выходе блока получаем управляющее ускорение, поступающее на вход модели движения самолета-противника 12.
Модель движения самолета-истребителя 10 включает:
- блок интегрирования уравнений движения самолета,
- блок вычисления аэродинамического ускорения,
- блок вычисления ускорения от двигателей,
- блок описания параметров атмосферы.
Входной информацией для модели движения являются: начальный вектор состояния в земной системе координат, распределения случайных отклонений плотности атмосферы и случайных отклонений аэродинамических характеристик объекта, тяга двигателей. Выходной информацией модели движения самолета являются текущий вектор состояния самолета в земной системе координат, углы крена, рысканья и тангажа, угловые скорости по крену, рысканью и тангажу, текущая долгота, текущая географическая широта, текущая перегрузка.
Основные уравнения движения самолета-истребителя в векторной форме приведены ниже.
Движение центра масс:

где  - радиус-вектор объекта,
- радиус-вектор объекта,
 - вектор линейной скорости объекта,
- вектор линейной скорости объекта,
 - вектор угловой скорости,
- вектор угловой скорости,
 - вектор тяги двигателей,
- вектор тяги двигателей,
 - вектор аэродинамической силы,
- вектор аэродинамической силы,
m - масса объекта.
Движение вокруг центра масс:
где - вектор угловой скорости объекта,
 - вектор моментов внешних сил,
- вектор моментов внешних сил,
 - тензор моментов инерции.
- тензор моментов инерции.
Интегрирование дифференциальных уравнений, описывающих движение самолета, производится методом Рунге-Кутта 4 порядка.
Модель движения авиационной управляемой ракеты (АУР) 11 в векторной форме выражается в следующем виде:

где - вектор скорости центра масс АУР;
- радиус-вектор центра масс АУР в инерциальной системе координат,
а упр - управляющее ускорение,
а воз - возмущающее ускорение.
Начальными условиями для интегрирования уравнения движения АУР являются значение параметров движения самолета-носителя на момент отделения ракеты от носителя.
Управление авиационной ракетой на начальном этапе автономного полета осуществляется по командам от целеуказателя самолета-носителя по командам радиолинии, а далее управление осуществляется от головки самонаведения АУР.
Модель движения самолета-противника 12 включает:
- блок интегрирования уравнений движения самолета,
- блок вычисления аэродинамического ускорения,
- блок вычисления ускорения от двигателей,
- блок описания параметров атмосферы.
Входной информацией для модели движения являются: начальный вектор состояния в земной системе координат. Выходной информацией модели движения самолета являются текущий вектор состояния самолета в земной системе координат, углы крена, рысканья и тангажа, угловые скорости по крену, рысканью и тангажу, текущая долгота, текущая географическая широта, текущая перегрузка. На выходе модели получаем текущие параметры местоположения самолета-противника, поступающие на вход блока поражающей обстановки 15 и на вход блока визуальной обстановки 16.
Блок тактической обстановки 13 обеспечивает процесс формализации тактической обстановки и формирования сценариев обучения. Он позволяет на основе данных геоинформационных систем и баз данных визуализации в видимом, ИК- и радиодиапозонах сформировать программный комплекс имитации визуального изображения (в том числе и для многофункциональных индикаторов). При этом полноценное использование цифровых карт местности и баз данных позволяет с высокой достоверностью воспроизводить в тренажере участки местности, что способствует подготовке летного состава к реальным задачам боевого применения. При формализации тактической обстановки и формировании сценария тренажа на боевое применение детализируются:
тактика противоборства, формализуемая в виде сценариев, оперативно-тактических моделей и набора тактических решений как для своих сил, так и для противника; траекторное, информационное, огневое управление и взаимодействие в составе тактического звена; управления средствами РЭБ. Кроме того, задаются исходное состояние сил и средств, распределение по степеням боевой готовности; состояние системы управления силами и средствами противовоздушной обороны (ПВО) противника; характеристики физических полей в районе действия сил; метеоусловия (время года, облачность, наличие и интенсивность осадков).
Блок радиолокационной обстановки 14 обеспечивает моделирование бортовой радиолокационной системы (БРЛС), на вход которого из модели движения самолета-истребителя и модели самолета-противника поступают текущие параметры и производится вычисление их относительных параметров:




где ρ,  , Δ - относительные параметры по дальности, скорости и угловой скорости между самолетом-истребителем и самолетом-противника. Вычисленные относительные параметры поступают на вход модели бортовой радиолокационной системы. Процесс совместного функционирования БРЛС и цифровой бортовой вычислительной системы (БВС) выполняется в несколько этапов, включающих: формирование первичных измерений (отметок); завязку траекторий; экстраполяцию относительных фазовых координат (траекторий) всех сопровождаемых целей в промежутках между поступлениями от БРЛС результатов измерений; идентификацию поступающих отметок на их принадлежность тем или иным экстраполируемым траекториям; коррекцию (фильтрацию) экстраполированных фазовых траекторий по результатам идентифицированных измерений; ранжирование целей по степени их важности (опасности); сброс сопровождаемых траекторий. Формирование первичных измерений включает в себя все этапы первичной обработки радиосигналов, начиная от их обнаружения и заканчивая получением отсчетов дальности, скорости сближения и бортовых пеленгов целей в горизонтальной и вертикальной плоскостях. Завязка траекторий - это процесс взятия на сопровождение новых целей, появляющихся в зоне обзора БРЛС. Завязка новой траектории осуществляется по результатам измерений дальности ρ, скорости сближения и бортовых пеленгов обнаруженных целей ϕг и ϕв в горизонтальной и вертикальной плоскостях после проверки их принадлежности всем сопровождаемым целям (траекториям). Экстраполяция представляет собой процесс прогнозирования всех фазовых координат относительного движения целей и истребителя, которые используются для управления самолетом и выдачи команд целеуказания (ЦУ) ракетам. В зависимости от требований к точности сопровождения и вычислительных возможностей БВС коррекция (фильтрация) экстраполированных траекторий по идентифицированным результатам измерений может выполняться по различным законам. Наиболее употребительны для этого алгоритмы оптимальной линейной аналого-дискретной фильтрации, полученные на основе процедур калмановского оценивания.
, Δ - относительные параметры по дальности, скорости и угловой скорости между самолетом-истребителем и самолетом-противника. Вычисленные относительные параметры поступают на вход модели бортовой радиолокационной системы. Процесс совместного функционирования БРЛС и цифровой бортовой вычислительной системы (БВС) выполняется в несколько этапов, включающих: формирование первичных измерений (отметок); завязку траекторий; экстраполяцию относительных фазовых координат (траекторий) всех сопровождаемых целей в промежутках между поступлениями от БРЛС результатов измерений; идентификацию поступающих отметок на их принадлежность тем или иным экстраполируемым траекториям; коррекцию (фильтрацию) экстраполированных фазовых траекторий по результатам идентифицированных измерений; ранжирование целей по степени их важности (опасности); сброс сопровождаемых траекторий. Формирование первичных измерений включает в себя все этапы первичной обработки радиосигналов, начиная от их обнаружения и заканчивая получением отсчетов дальности, скорости сближения и бортовых пеленгов целей в горизонтальной и вертикальной плоскостях. Завязка траекторий - это процесс взятия на сопровождение новых целей, появляющихся в зоне обзора БРЛС. Завязка новой траектории осуществляется по результатам измерений дальности ρ, скорости сближения и бортовых пеленгов обнаруженных целей ϕг и ϕв в горизонтальной и вертикальной плоскостях после проверки их принадлежности всем сопровождаемым целям (траекториям). Экстраполяция представляет собой процесс прогнозирования всех фазовых координат относительного движения целей и истребителя, которые используются для управления самолетом и выдачи команд целеуказания (ЦУ) ракетам. В зависимости от требований к точности сопровождения и вычислительных возможностей БВС коррекция (фильтрация) экстраполированных траекторий по идентифицированным результатам измерений может выполняться по различным законам. Наиболее употребительны для этого алгоритмы оптимальной линейной аналого-дискретной фильтрации, полученные на основе процедур калмановского оценивания.
Блок поражающей обстановки 15 моделирует функционирование боевой части авиационной управляемой ракеты, трансформируемая в поток поражающих элементов (осколочные, стержневое воздействие, зажигательные). Аналитическое описание блока поражающей обстановки имеет следующий вид:

где  - вектор местоположения авиационной управляемой ракеты,
- вектор местоположения авиационной управляемой ракеты,
 - вектор местоположения самолета-противника,
- вектор местоположения самолета-противника,
Р - поражающее действие боевой части,
I - поражающие элементы.
Блок визуальной обстановки 16 обеспечивает имитацию внекабинной обстановки как для летчика самолета-истребителя, так и для летчика самолета-противника.
Блок визуальной обстановки, создающий визуальную обстановку на рабочем месте летчика самолета-истребителя, состоит из трех каналов визуализации:
- канал визуализации передней сферы обзора,
- канал визуализации верхней сферы обзора,
- канал визуализации задней сферы обзора.
Канал визуализации передней сферы обеспечивает коллимированное изображение подстилающей местности, самолетов своего звена, самолетов противников, авиационных ракет, которые летчик наблюдает через лобовое и боковое остекление кабины самолета. Система визуализации (СВ) состоит из генераторов изображения, проекторов, коллиматоров и базы данных сюжетов визуальной обстановки.
Канал визуализации верхней сферы обеспечивает летчика самолета-истребителя изображением самолетов своего звена, самолетов-противников, наблюдаемых через фонарь кабины самолета, он состоит из генератора изображения, проектора, сферического экрана и базы данных сюжетов визуальной обстановки.
Канал визуализации задней сферы обеспечивает летчика изображением в задней сфере самолета, наблюдаемым в зеркало заднего обзора, он состоит из генератора изображения, ЖК-монитора и базы данных сюжетов визуальной обстановки. Система визуальной обстановки рабочего места самолета-противника состоит из сферического экрана, проектора, генератора изображения и базы данных сюжетов визуальной обстановки.
В блоке визуализации производится векторное преобразование из системы координат, в которых были определены изображения подстилающей поверхности Земли, самолетов и ракет, в систему координат генерации изображения в плоскости наблюдателя на рабочем месте оператора следующего вида:

где - вектор положения изображения подстилающей поверхности Земли, самолета и ракет в системе координат плоскости наблюдателя,
 - вектор положения изображения подстилающей поверхности Земли, самолета и ракет в системе координат, принятой в модели движения,
- вектор положения изображения подстилающей поверхности Земли, самолета и ракет в системе координат, принятой в модели движения,
М - матрица преобразования положения изображения подстилающей поверхности Земли, самолетов и ракет в системе координат, принятой в модели движения, в систему координат плоскости наблюдателя.
Блок объективной оценки обученности 17 предназначен для оценки действий летчика-истребителя в воздушном бою (оценки вероятности поражения целей). При оценке действий летчика при моделировании воздушного боя атака маневрирующей цели рассматривается как процесс функционирования трехступенчатой динамической системы.
Первая ступень - пилотируемый летчиком самолет-истребитель, являющийся носителем и стартовой площадкой для авиационной управляемой ракеты, вторая ступень - управляемая ракета, третья ступень - боевая часть, трансформируемая в поток поражающих элементов.
Каждая предыдущая ступень влияет на эффективность решения задачи, стоящей перед следующей ступенью, в результате вероятность поражения воздушного противника является оценкой эффективности всего авиационного комплекса. В целом воздушный бой рассматривается как антогонистическая матричная игра, в которой возможными стратегиями выступают комбинации типовых маневров. В качестве максимизируемого показателя используется вероятность победы истребителя в маневренном воздушном бою W:
W(Xп, Xи, Uc, Gф),
где W - вероятность поражения,
Хп - оценка влияния характеристик противника,
Хи - оценка технических характеристик истребительно-авиационного комплекса (ИАК),
Uc - оценка стратегий управления ИАК,
Gф - оценка влияния случайных факторов.
Объективная оценка выполнения задачи воздушного боя летчиком самолета-истребителя О является функциональная зависимость от W: O=f(W).
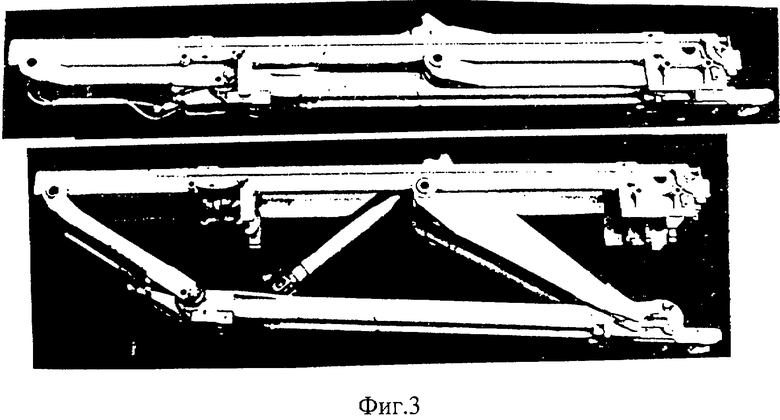
Блок авиационного катапультного устройства 18 обеспечивает имитацию принудительного отделения АУР от самолета-носителя посредством катапультирования, придающего ракете некоторую начальную относительную скорость (линейную Vx и угловую ωz). Для принудительного отделения АУР от внешних подвесок подкрыльевых и подфюзеляжных используются авиационные катапультные устройства (фиг.3), их основное назначение - отталкивание АУР за пределы обтекающего самолета-носителя интерференционного слоя до запуска ее двигателя для обеспечения безопасного отделения, исключающего возможность столкновения ракеты с носителем, а также предотвращения попадания газовой струи ракетного двигателя в воздухосборнике самолета.
При катапультировании реализуется относительно малая линейная скорость отделения, определяющая время нахождения ракеты в возмущенном носителе потоке. Под действием тяги своего двигателя ракета приобретает относительную скорость Vx=13...15 м/с. Поперечная относительная скорость, реализуемая с помощью АКУ, составляет всего 3,5...6 м/с. Кроме того, двигатель ракеты включается с задержкой 0,2...0,5 сек. Это приводит к достаточно большому времени воздействия на ракету дополнительных сил и моментов, обусловленных аэродинамической интерференцией самолета и ракеты. При отделении ракеты ее относительная угловая скорость и относительный угол тангажа (ω, θ) должны быть отрицательными. Следует отметить, что потери ракетой устойчивости недопустимы как по причине срыва боевой работы, так и по причине опасности столкновения нештатно управляемой ракеты с самолетом-носителем или соседними самолетами в боевой группе. Команды на катапультирование АУР поступают как от летчика, так и от бортовой системы управления вооружением в автоматическом режиме. Нештатные ситуации (аварийные ситуации) работы авиационного катапультного устройства на тренажере задаются с пульта контроля и управления тренировки.
Пульт контроля и управления тренировкой 19 обеспечивает всеми необходимыми техническими и программными средствами рабочее место инструктора, который формирует сценарий "полета", создает боевую ситуацию, контролирует ход тренировки. На пульте имеются средства связи с летчиками, находящимися в макете кабины самолета, осуществляется визуальный контроль за его деятельностью, средства ввода отказов в модели бортовых систем самолета-носителя и системы "АКУ-АУР", документируются и сохраняются результаты деятельности летчиков средствами регистрации.
По материалам данной заявки разработан тренажер воздушного боя для Центра боевой подготовки летного состава военно-воздушных сил по заказу военного ведомства России.
Технические решения данной заявки на изобретение позволяют расширить функциональные возможности тренажера.
Источники информации
Система визуализации для стенда моделирования с обзорно-прицельным устройством. Патент №220829, G 09 В 9/00, 9/30, RU, C2. Публ. БИПМ №11 от 20.12.1998 г.
Авиация ПВО России и научно-технический прогресс: Боевые комплексы и системы вчера, сегодня, завтра /Под редакцией Е.А.Федосова. М.: Дрофа, 2001 г.
http://games.1c.ru/lock on/?Type=file & fileid=120 Руководство пилота-симулятора «Lock On. Современная авиация» - М. Фирма «1С, 2003, - 100 с.
Изобретение относится к области авиационного тренажеростроения и может быть использовано для подготовки военных летчиков, отработке бортовой аппаратуры и методики обучения летчиков ведению воздушного боя. Устройство содержит последовательно соединенные органы управления самолетом, вычислитель динамики самолета и цели, вычислительные средства визуализации, средства визуализации, индикатор на лобовом стекле, рабочее место летчика самолета-истребителя, рабочее место летчика самолета-противника, блок бортовых систем самолета-истребителя, блок бортовых систем самолета-противника, модель движения самолета-истребителя, модель движения авиационной управляемой ракеты (АУР), модель движения самолета-противника, блок тактической обстановки, блок радиолокационной обстановки, блок поражающей обстановки, блок визуальной обстановки, блок объективной оценки обученности, блок авиационного катапультного устройства, пульт контроля и управления тренировкой. Технический результат заключается в возможности проведения обучения и тренировки летчиков ведению группового воздушного боя в условиях, приближенным к условиям реального полета. 3 ил.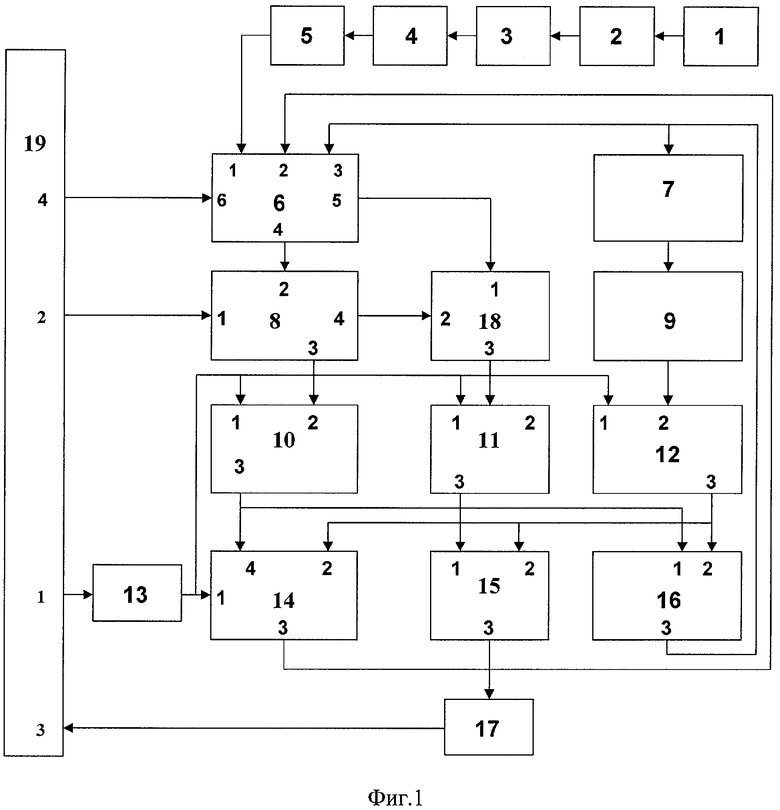
Тренажер воздушного боя, содержащий последовательно соединенные органы управления самолетом, вычислитель динамики самолета и цели, вычислительные средства визуализации, средства визуализации, индикатор "на лобовом стекле", отличающийся тем, что дополнительно введены рабочее место летчика самолета-истребителя, рабочее место летчика самолета-противника, блок бортовых систем самолета-истребителя, блок бортовых систем самолета-противника, модель движения самолета-истребителя, модель движения авиационной управляемой ракеты (АУР), модель движения самолета-противника, блок тактической обстановки, блок радиолокационной обстановки, блок поражающей обстановки, блок визуальной обстановки, блок объективной оценки обученности, блок авиационного катапультного устройства, пульт контроля и управления тренировкой, первый выход которого соединен с входом блока тактической обстановки, выход которого параллельно соединен с первым входом блока радиолокационной обстановки, с первым входом модели движения самолета-истребителя, с первым входом модели движения АУР, с первым входом модели движения самолета-противника, третий выход которой параллельно соединен со вторым входом блока визуальной обстановки, со вторым входом блока поражающей обстановки, со вторым входом блока радиолокационной обстановки, третий выход которого связан со вторым входом рабочего места летчика самолета-истребителя, первый вход которого соединен с выходом индикатора "на лобовом стекле", а четвертый выход пульта контроля и управления тренировкой соединен с шестым входом рабочего места летчика самолета-истребителя, четвертый выход которого соединен со вторым входом блока бортовых систем самолета-истребителя, третий выход которого соединен со вторым входом модели движения самолета-истребителя, третий выход которой параллельно соединен с четвертым входом блока радиолокационной обстановки и с первым входом блока визуальной обстановки, третий выход которого параллельно соединен с входом рабочего места летчика самолета-противника и с третьим входом рабочего места летчика самолета-истребителя, пятый выход которого соединен с первым входом блока авиационного катапультного устройства, третий выход которого соединен со вторым входом модели движения АУР, третий выход которой соединен с первым входом блока поражающей обстановки, третий выход которого соединен со входом блока объективной оценки обученности, выход которого соединен с третьим входом пульта контроля и управления тренировкой, второй выход которого соединен с первым входом блока бортовых систем самолета-истребителя, четвертый выход которого соединен со вторым входом блока авиационного катапультного устройства, а выход рабочего места летчика самолета-противника соединен с входом блока бортовых систем самолета-противника, выход которого соединен со вторым входом модели движения самолета-противника.
| СИСТЕМА ВИЗУАЛИЗАЦИИ ДЛЯ СТЕНДА МОДЕЛИРОВАНИЯ С ОБЗОРНО-ПРИЦЕЛЬНЫМ УСТРОЙСТВОМ | 2001 |
|
RU2202829C2 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| JP 11065416 A, 05.03.1999 | |||
| Поплавок уровнемера для резервуаров, находящихся под высоким давлением | 1978 |
|
SU732677A1 |

