Изобретение может быть использовано для создания помех радиоэлектронным средствам (РЛС, радиолиниям связи и управления и др.).
Известны устройства создания помех, способные вести радиотехническую разведку излучений радиоэлектронных средств (РЭС) противника, измерять параметры (частоту, длительность импульсов, период повторения) и создавать помехи этим РЭС [США. Патент N 3891989 по кл. H 04 K 3/00 от 24.06.75 г., США. Патент N 3896439 по кл. H 04 K 3/00 от 22.07.75 г., США. Патент N 3806926 по кл. H 04 K 3/00 от 23.04.74 г.]. Однако данные устройства не способны вести радиолокационное обнаружение этих РЭС (объектов-носителей РЭС) и вследствие этого как информационные системы имеют следующие недостатки:
невозможность создания прицельных по направлению помех бистатическим и многопозиционным РЛС, пассивным средствам радиотехнической и радиолокационной разведки, приемникам радиолиний связи и управления и др.;
малая дальность разведки РЭС, работающих в режимах повышенной скрытности радиоизлучений (ПСР);
сложность обеспечения разведки местоположения целей и их автосопровождения, когда РЭС работают в режиме кратковременного излучения и др.;
невозможность определения координаты дальности до разведуемого и/или подавляемого РЭС.
Невозможность измерения дальности до цели этими известными устройствами является их недостатком не только как информационных систем, но и не позволяет реализовать в них управление параметрами помех, например мощностью излучения в зависимости от дальности до подавляемого РЭС, что снижает скрытность работы средств помех и затрудняет обеспечение их электромагнитной совместимости с другими средствами, а также не позволяет экономить энергетические ресурсы.
Известны радиолокационные станции [Великобритания. Патент N 4800 по заявке N 1587357 по кл. G 01 S 13/92, 1981 г., Франция. Патент по заявке N 2447041 по кл. G 01 S 15/42, 1980 г.], в которых используются различные типы зондирующих сигналов, в том числе широкополосные, которые в принципе могли бы использоваться для решения задач, возлагаемых на предлагаемое устройство. Однако они как информационные системы станций помех имеют следующие недостатки:
не могут вести радиотехническую разведку излучений РЭС, а следовательно, создавать прицельные по частоте и другим параметрам помехи, из-за чего усложняется задача распознавания целей;
не имеют заградительного режима постановки помех, а следовательно, с учетом предыдущего недостатка не могут быть использованы для создания помех РЭС, частоты которых не заданы априори и могут не совпадать с диапазоном работы этих РЛС;
имеют малую дальность разведки малоразмерных объектов, создаваемых по программе "Стелс";
работая только в радиолокационном режиме, обладают низкой помехозащищенностью, скрытностью и другими недостатками.
Наиболее близким по технической сущности к заявляемой станции радиоэлектронной разведки и подавления является "Станция шумовых помех" [л. 1, с. 109] , содержащая приемную и передающую антенны, разведприемник, систему запоминания частоты, блок перестройки частоты передатчика помех, усилитель мощности и генератор шума, причем выход разведприемника, вход которого соединен с выходом приемной антенны, соединен с входом системы запоминания частоты, выход которой соединен с входом блока перестройки частоты, выход которого соединен с первым входом усилителя мощности, выход которого соединен с передающей антенной, второй вход усилителя мощности соединен с выходом генератора шума.
Известное устройство работает следующим образом. Сигналы подавляемой РЛС, принятые приемной антенной, усиленные в разведприемнике, открытом в режиме разведки, поступают на вход системы запоминания частоты, где на определенное время запоминается несущая частота РЛС. Схема запоминания частоты управляет блоком подстройки частоты передатчика помех, с помощью которого непосредственно сам передатчик настраивается (усилитель мощности) на несущую частоту подавляемой РЛС. В режиме подавления помеховый сигнал с выхода усилителя мощности поступает на вход передающей антенны, излучающей его в направлении подавляемой РЛС.
Недостатки прототипа аналогичны недостаткам, перечисленным для устройств создания помех [США. Патент N 3891989 по кл. H 04 K 3/00 от 24.06.75 г., США. Патент N 3896439 по кл. H 04 K 3/00 от 22.07.75 г., США. Патент N 3806926 по кл. H 04 K 3/00 от 23.04.74 г.], рассмотренным выше.
В основу изобретения поставлена задача создания устройства, в котором реализуется радиотехническая (РТР) и радиолокационная (РЛР) разведки и подавление на основе использования единого шумового сигнала для режимов создания помехи и радиолокационной разведки, устраняющее перечисленные недостатки прототипа.
Это достигается тем, что в известное устройство, содержащее приемную и передающую антенны, приемник, систему запоминания частоты, блок перестройки частоты, генератор шума, усилитель мощности, причем второй выход приемной антенны соединен с первым входом приемника, выход которого соединен с входом системы запоминания частоты, выход которой соединен с вторым входом блока перестройки частоты, второй выход которого соединен с входом генератора шума, выход усилителя мощности соединен с входом передающей антенны, введены дополнительный приемник, первый и второй коммутаторы, направленный ответвитель, многоотводная линия задержки (МЛЗ), n умножителей, система управления, первый, второй и третий сумматоры, модулятор, детектор, рециркулятор, пороговое устройство, реле захвата, первый и второй формирователи импульсов, индикатор, блок генераторов импульсов запуска, первая и вторая дисперсионные ультразвуковые линии задержки (ДУЛЗ), генератор пилообразного напряжения, первый, второй и третий смесители, гетеродин, первый и второй интеграторы, первый и второй умножители напряжения, устройство вычитания, генератор строб-импульса, линия задержки, причем первый выход дополнительного приемника, первый вход которого соединен с первым выходом приемной антенны, второй вход которого соединен с выходом первого формирователя импульсов и выходом третьего сумматора, третий вход которого соединен с первым выходом блока перестройки частоты (БПЧ), четвертый вход которого соединен с четвертым выходом системы управления, пятый вход которого соединен с выходом второго формирователя импульсов, соединен с входом МЛЗ, n выходов которой соединены с первыми входами n умножителей, выход первого сумматора, n входов которого соединены с выходами n умножителей, соединен с входом детектора, выход рециркулятора, вход которого соединен с выходом детектора, соединен с входом порогового устройства, выход реле захвата, вход которого соединен с выходом порогового устройства, соединен с первыми входами первого и второго умножителей напряжения, выход первого умножителя напряжения, второй вход которого соединен с выходом линии задержки, соединен с входом второго интегратора, выход второго умножителя напряжения, второй вход которого соединен с выходом генератора строб-импульса, соединен с входом первого интегратора, выход устройства вычитания, первый и второй входы которого соединены соответственно с выходами первого и второго интеграторов, соединен с вторым входом второго сумматора, а третий вход соединен с шестым выходом системы управления, выход второго сумматора, первый вход которого соединен с первым выходом генератора пилообразного напряжения, соединен с входом генератора строб-импульса, а выход последнего соединен с входом линии задержки и первым входом третьего сумматора, выход третьего сумматора, второй вход которого соединен с выходом линии задержки, соединен с третьим входом первого коммутатора, выход гетеродина, вход которого соединен с вторым выходом генератора пилообразного напряжения, соединен с вторыми входами первого и второго смесителей, выход первого смесителя, первый вход которого соединен с выходом третьего смесителя, соединен с входом первой ДУЛЗ, второй вход третьего смесителя соединен с вторым выходом дополнительного приемника, а его первый вход - с выходом модулятора, выход второго смесителя, первый вход которого соединен с выходом первой ДУЛЗ, соединен с входом второй ДУЛЗ, выход последней соединен с вторыми входами n умножителей, первый выход блока генераторов импульсов запуска соединен с входом генератора тактовых импульсов, вторым входом счетчика импульсов, входом генератора пилообразного напряжения, вторым входом индикатора, выход второго коммутатора, первый вход которого соединен с выходом модулятора, второй - с третьим выходом системы управления, третий - с вторым выходом направленного ответвителя, соединен с входом усилителя мощности, выход второго формирователя импульсов, второй вход которого соединен с вторым выходом блока генераторов импульсов запуска, а первый - с первым выходом системы управления, соединен с вторым входом модулятора, выход счетчика импульсов, первый вход которого соединен с выходом генератора тактовых импульсов, третий - с выходом порогового устройства, соединен с внешними системами целеуказания, выход порогового устройства соединен с первым входом индикатора, выход первого коммутатора, первый вход которого соединен с выходом генератора шума, второй вход - с четвертым выходом системы управления, соединен с входом направленного ответвителя, первый выход которого соединен с первым входом модулятора, третий выход блока генератора импульсов запуска соединен с вторым входом первого формирователя импульсов, первый вход которого соединен с вторым выходом системы управления, четвертый выход системы управления, вход которой соединен с внешними системами целеуказания, соединен с вторым входом приемника, пятый выход системы управления соединен с первым входом блока перестройки частоты.
Заявляемая станция радиоэлектронной разведки и подавления содержит известные и широко применяемые на практике элементы. В частности, генератор тактовых импульсов, 1-й и 2-й формирователи импульсов, генератор строб-импульса, счетчик импульсов, пороговое устройство, генератор пилообразного напряжения, блок генераторов импульсов запуска могут быть реализованы на основе использования стандартных элементов /л. 2, с. 285, 246, 241, 364, 117, 324, 285/. Схемы умножителей напряжения, 2-го и 3-го сумматоров, смесителей, ДУЛЗ, коммутаторов и интеграторов приведены соответственно в /л. 3, с. 317; л. 4, с. 218; л. 5, с. 180; л. 6, с. 408; л. 7, с. 247;, л. 8, с. 99/.
В качестве индикатора может быть использовано устройство, которое приведено в /л. 9, с. 220/.
Введение отличительных признаков позволило использовать сигнальное совмещение режимов радиолокации и создания помех, т.е. использовать шумовой сигнал в качестве зондирующего и помехового, что обеспечивает возможность параллельного ведения радиолокационной разведки и радиоподавления. Использование шумового сигнала в качестве зондирующего обеспечивает как наилучшие возможности по обеспечению высокой точности измерения координат (дальности и скорости), так и высокую помехоустойчивость [л. 10, 11, 12].
Таким образом, введение отличительных признаков позволило повысить эффективность станции помех за счет введения режима радиолокационной разведки путем использования шумового сигнала в качестве зондирующего.
Для пояснения изобретения ниже приводится описание, показывающее в качестве примера вариант осуществления изобретения со ссылкой на прилагаемые чертежи, на которых приведено:
фиг. 1 - схема устройства в общем виде;
фиг. 2 - эпюры, поясняющие работу устройства в режиме радиолокационной разведки (режим поиска сигнала) и создания импульсных помех;
фиг. 3 - эпюры, поясняющие работу устройства в режиме радиолокационной разведки (режим поиска сигнала) и создания квазинепрерывных помех;
фиг. 4 - эпюры, поясняющие работу устройства в режиме радиолокационного сопровождения объекта по дальности и создания квазинепрерывных помех;
фиг. 5 - эпюры, поясняющие принцип работы линии управляемой временной задержки сигнала;
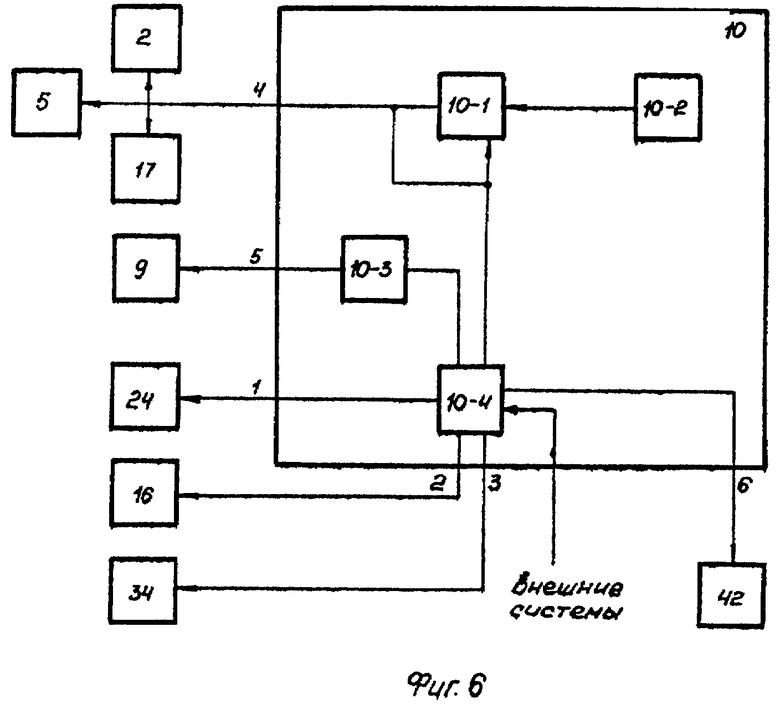
фиг. 6 - схема системы управления;
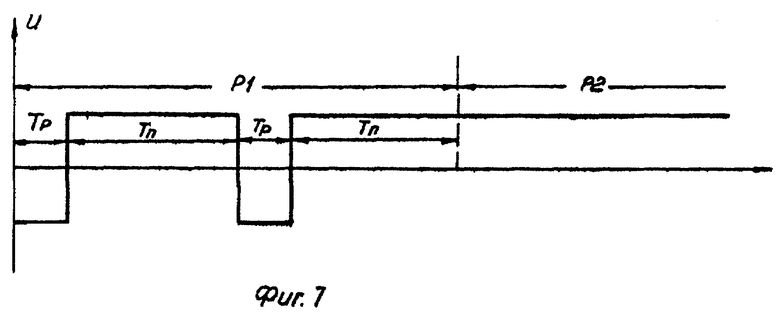
фиг. 7 - эпюра напряжения программного устройства 10-2 системы управления.
На фиг. 1-7 обозначены:
1 - приемная антенна;
2 - дополнительный приемник;
3 - генератор тактовых импульсов (ГТИ);
4 - многоотводная линия задержки (МЛЗ);
5 - приемник;
6 - счетчик импульсов (СИ);
7-1, ..., 7-n - умножители;
8 - система запоминания частоты (СЗЧ);
9 - блок перестройки частоты (БПЧ);
10 - система управления (СУ);
10-1 - коммутатор системы управления;
10-2 - программное устройство;
10-3 - формирователь кода частоты;
10-4 - пульт управления;
11 - реле захвата (РЗ);
12, 13 - первый и второй сумматоры соответственно;
14 - генератор шума (ГШ);
15 - пороговое устройство (ПУ);
16 - первый формирователь импульсов (1ФИ);
17 - первый коммутатор;
18 - блок генераторов импульсов запуска (БГИЗ);
19 - рециркулятор;
20 - детектор;
21 - индикатор;
22 - модулятор;
23 - направленный ответвитель (НО);
24 - второй формирователь импульсов (2ФИ);
25 - вторая дисперсионная ультразвуковая линия задержки (2ДУЛЗ);
26 - генератор пилообразного напряжения (ГПН);
27 - передающая антенна;
28 - третий смеситель;
29 - первый смеситель;
30 - первая дисперсионная ультразвуковая линия задержки (1ДУЛЗ);
31 - второй смеситель;
32 - гетеродин;
33 - усилитель мощности (УМ);
34 - второй коммутатор;
35, 36 - первый и второй умножители напряжения (УН) соответственно;
37, 38 - первый и второй интеграторы соответственно;
39 - третий сумматор;
40 - линия задержки (ЛЗ);
41 - генератор строб-импульса (ГС);
42 - устройство вычитания (УВ).
C1 - напряжение управления, поступающее с четвертого выхода СУ 10;
У0 - напряжение порога порогового устройства;
У1, У2, У3 - импульсы запуска с БГИЗ;
У4 - импульсы коммутации, формируемые первым формирователем импульсов;
У5 - помеховый сигнал;
У6 - сигнал, отраженный от цели на выходе приемной антенны;
У'6, У''6 - незадержанный и задержанный строб-импульсы соответственно на выходе третьего сумматора 39;
У7 - импульсы на выходе второго ФИ;
У8 - импульсный шумовой сигнал на выходе модулятора;
У9 - импульсный шумовой сигнал на выходе дополнительного приемника;
У10-1 ... У10-n - шумовые импульсы на выходе МЛЗ;
У11 - импульсы на выходе второй ДУЛЗ в различные моменты времени;
У12 - сигнал на входе детектора;
У13 - сигнал на выходе рециркулятора;
У14 - сигнал на выходе ПУ;
У15 - сигнал на входе СИ;
У16 - сигнал на выходе устройства вычитания;
У17 - сигнал на выходе ГПН;
У18 - сигнал на выходе третьего сумматора;
T1, T2 - периоды работы устройства в режимах Р1 и Р2 соответственно;
T3 - время задержки сигнала на выходе второй ДУЛЗ относительно сигнала, поступающего на первый вход первого смесителя;
ΔT - диапазон изменения величины задержки ДУЛЗ;
ΔF - девиация частоты ДУЛЗ;
fг - частота гетеродина;
fпр - промежуточная частота.
Согласно фиг. 1 предлагаемое устройство содержит:
приемную антенну 1 - для приема сигналов, отраженных от объекта, и сигналов, излучаемых РЭС объекта, ее первый выход соединен с первым входом дополнительного приемника 2, а второй - с первым входом приемника 5;
дополнительный приемник 2 - для приема и усиления сигналов, отраженных от объекта, его первый выход соединен с входом многоотводной линии задержки 4, второй выход соединен с вторым входом третьего смесителя 28;
генератор тактовых импульсов 3 - для формирования импульсов с частотой повторения 1/Δf , где Δf - ширина спектра излучаемого шумового сигнала, выход ГТИ соединен с первым входом СИ 6;
многоотводную линию задержки 4 - для задержки сигнала, принятого дополнительным приемником 2 на время n/Δf , где n - номер отвода МЛЗ, n выходов МЛЗ соединены с n входами умножителей 7-1...7-n;
приемник 5 - для приема сигналов, излучаемых РЭС объекта, и измерения их несущей частоты, выход приемника соединен с входом СЗЧ 8;
счетчик импульсов 6 - для вычисления дальности до объекта, его выход соединен с внешними системами целеуказания;
умножители 7-1. . .7-n - для умножения принятого отраженного сигнала на радиосигнал, поступающий с выхода второй ДУЛЗ 25, выходы умножителей 7-1... 7-n соединены с n входами первого сумматора 12;
систему запоминания частоты 8 - для запоминания частоты сигналов, излучаемых объектом, выход СЗЧ соединен с вторым входом БПЧ 9;
блок перестройки частоты 9 - для перестройки частоты генератора шума 14 и дополнительного приемника 2, первый выход БПЧ соединен с третьим входом дополнительного приемника 2, а второй - с входом ГШ 14;
систему управления 10 - для управления режимами работы предлагаемого устройства, первый выход СУ соединен с первым входом второго ФИ 24, второй - с первым входом первого ФИ 16, третий - с вторым входом второго коммутатора 34, четвертый - с вторым входом первого коммутатора 17, вторым входом приемника 5, с четвертым входом дополнительного приемника 2, пятый - с первым входом БПЧ 9, шестой - с третьим входом устройства вычитания 42;
реле захвата 11 - для переключения станции из режима поиска объекта по дальности в режим слежения, выход РЗ соединен с первыми входами первого и второго умножителей напряжения 35, 36;
первый сумматор 12 - для суммирования радиосигналов, поступающих с выходов умножителей 7-1...7-n, выход сумматора соединен с входом детектора 20;
второй сумматор 13 - для суммирования напряжений, поступающих с первого выхода ГПН 26 и выхода устройства вычитания 42, выход второго сумматора соединен с входом генератора строб-импульса 41;
генератор шума 14 - для формирования высокочастотного шумового сигнала, выход ГШ соединен с первым входом первого коммутатора 17;
пороговое устройство 15 - для обнаружения сигнала, отраженного от объекта, выход ПУ соединен с третьим входом СИ 6, входом РЗ 11 и первым входом индикатора 21;
первый формирователь импульсов 16 - для формирования импульсов бланкирования передатчика на время приема импульсов, отраженных от объекта, эти импульсы являются открывающими для входных цепей дополнительного приемника 2, выход первого ФИ соединен с третьим входом первого коммутатора 17 и с вторым входом дополнительного приемника 2;
первый коммутатор 17 - для переключения предлагаемого устройства из режима радиотехнической разведки (РТР) и подавления в режим радиолокационной разведки (РЛР) и подавления и наоборот, выход первого коммутатора соединен с входом НО 23;
блок генераторов импульсов запуска 18 - для формирования импульсов запуска и синхронизации, первый выход БГИЗ соединен с входом ГТИ 3, с вторым входом СИ 6, с вторым входом индикатора 21, с входом ГПН 26, второй выход - с вторым входом второго ФИ 24, третий выход - с вторым входом первого ФИ 16;
рециркулятор 19 - для некогерентного накопления пачки импульсов, его выход соединен с входом ПУ 15;
детектор 20 - для детектирования радиосигналов, поступающих с выхода первого сумматора 12, выход детектора соединен с входом рециркулятора 19;
индикатор 21 - для визуального обнаружения оператором сигналов, отраженных от объекта, и определения его координат;
модулятор 22 - для формирования шумового импульса длительностью Tи, выход модулятора соединен с первыми входами третьего смесителя 28 и второго коммутатора 34;
направленный ответвитель 23 - для разделения шумового сигнала, поступающего с выхода первого коммутатора 17 на два выхода, первый выход НО соединен с первым входом модулятора 22, а второй - с третьим входом второго коммутатора 34;
второй формирователь импульсов 24 - для генерирования видеоимпульсов длительностью Tи, выход его соединен с вторым входом модулятора 22 и пятым входом дополнительного приемника 2;
вторую ДУЛЗ 25 - для обратного преобразования частоты и восстановления спектра задержанного сигнала, выход ее соединен с вторыми входами умножителей 7-1...7-n;
генератор пилообразного напряжения 26 - для управления частотой генератора 32 и временным положением строб-импульса, формируемого ГС 42, первый выход ГПН соединен с первым входом второго смесителя 13, второй - с входом гетеродина 32;
передающую антенну 27 - для излучения помехового и зондирующего сигналов в направлении объекта;
третий смеситель 28 - для преобразования сигнала, поступающего с выхода модулятора 22, на промежуточную частоту, выход третьего смесителя соединен с первым входом первого смесителя 29;
первый смеситель 29 - для управления частотой задерживаемого сигнала первой ДУЛЗ 30, с входом которой соединен его выход;
первую ДУЛЗ 30 - для задержки сигнала в соответствии с его частотой, ее выход соединен с первым входом второго смесителя 31;
второй смеситель 31 - для обратного преобразования сигнала на промежуточную частоту fпр, выход второго смесителя соединен с входом второй ДУЛЗ 25;
гетеродин 32 - для управления частотами сигналов, поступающих на первый и второй смесители, с вторыми входами которых соединен его выход;
усилитель мощности 33 - для усиления излучаемого сигнала по мощности, выход УМ соединен с входом передающей антенны 27;
второй коммутатор 34 - для переключения режимов создания импульсных или квазинепрерывных помех в станции, выход второго коммутатора соединен с входом УМ 33;
первый умножитель напряжения 35 - для умножения обнаруженного полезного сигнала на задержанный строб-импульс, выход первого УН соединен с входом второго интегратора 38;
второй умножитель напряжения 36 - для умножения обнаруженного полезного сигнала на незадержанный строб-импульс, выход второго УН соединен с входом первого интегратора 37;
первый и второй интеграторы 37, 38 - для интегрирования по времени сигналов, поступающих с выходов второго и первого УН 36, 35 соответственно, выходы первого и второго интеграторов соединены с первым и вторым входами УВ 42;
третий сумматор 39 - для суммирования задержанного и незадержанного строб-импульсов, выход третьего сумматора соединен с третьим входом первого коммутатора 17 и вторым входом дополнительного приемника 2;
линию задержки 40 - для задержки строб-импульса на величину Tи, выход ЛЗ соединен с вторыми входами первого УН 35 и третьего сумматора 39;
генератор строб-импульса 41 - для формирования строба сопровождения полезного сигнала, выход ГС соединен с вторым входом второго УН 36 и с первым входом третьего сумматора 39;
устройство вычитания 42 - для формирования напряжения, пропорционального временному рассогласованию между полезным сигналом и стробами, выход УВ 42 соединен с вторым входом второго сумматора 13.
Предлагаемое устройство может работать в следующих режимах:
Р1 - радиотехнической разведки и подавления;
Р2 - радиолокационной разведки и подавления;
Р3 - радиотехнической и радиолокационной разведки и подавления.
Разделение режимов Р2 и Р3 на 1 и 2 соответствует созданию импульсных (Р2-1, Р3-1) и квазинепрерывных (Р2-2, Р3-2) помех.
Управление режимами работы устройства осуществляется с помощью СУ 10, схема которой приведена на фиг. 6. Согласно фиг. 6 система управления содержит:
коммутатор 10-1 - для подключения напряжения с программного устройства 10-2 или постоянного напряжения с пульта управления 10-4;
программное устройство 10-2 - для формирования напряжений, управляющих режимами работы устройства;
формирователь кода частоты 10-3 - для формирования напряжения, определяющего частоту БПЧ 9;
пульт управления 10-4 - для ручного переключения режимов работы станции оператором.
Переключение режимов работы станции осуществляется с пульта управления (бл. 10-4) СУ 10. Пульт управления представляет собой набор переключателей, которые через соответствующие реле подают напряжения на блоки станции.
В режиме Р1 в течение времени Tр осуществляется разведка излучений объекта, в течение Tп - его подавление. Это переключение осуществляется с помощью программного устройства 10-2 (л. 2, с. 276), эпюры напряжений которого приведены на фиг. 7. Напряжение программного устройства 10-2 через коммутатор 10-1 с четвертого выхода СУ 10 поступает на оба приемника и на первый коммутатор 17. В течение времени Tр это напряжение отрицательной полярности открывает приемник 5, закрывает дополнительный приемник 2 и первый коммутатор 17. Приемная антенна принимает сигналы, излучаемые РЭС объекта, которые поступают на вход приемника 5.
Техническая реализация приемника 5 рассмотрена в [л. 1, с. 109].
С выхода приемника 5 сигналы поступают на вход СЗЧ 8, где на определенное время запоминается несущая частота РЭС, а с выхода СЗЧ 8 - на вход БПЧ 9, где используется для создания прицельных по частоте помех генератором шума 14. Схема запоминания частоты 8, БПЧ 9 по своему схемному исполнению не отличаются от использованных в прототипе предлагаемой станции [л. 1, с. 109] .
После обнаружения излучения РЭС объекта станция осуществляет ее подавление в течение заданного промежутка времени Tп.
Управление блоком перестройки частоты 9 осуществляется из СЗЧ 8 на основании результатов РТР приемником 5 или из СУ 10 оператором по априорной информации.
При подавлении объекта с четвертого выхода СУ 10 напряжение положительной полярности (+C1) закрывает приемник 5 и открывает первый коммутатор 17. Шумовой сигнал через НО 23 [л. 13, с. 22] и второй коммутатор 34 поступает в УМ 33, где усиливается и излучается передающей антенной 27 (помеха излучается). Дополнительный приемник 2 в режиме Р1 закрыт напряжением, поступающим на его второй вход с второго выхода СУ 10 через первый формирователь импульсов 16.
При необходимости станция может вести только РТР, не излучая помеховый сигнал. Для этого оператор с пульта управления выключает второй коммутатор, при этом напряжение с блока 10-4 через третий выход СУ 10 поступает на второй коммутатор 34.
В режиме Р2 предлагаемое устройство может создавать импульсные (фиг. 2) и квазинепрерывные помехи (фиг. 3), спектр которых задается БПЧ 9 по априорной информации, поступающей с пятого выхода СУ 10. Это напряжение поступает из блока формирователя кода частоты 10-3, который в простейшем случае представляет собой потенциометр, с помощью которого оператор задает амплитуду напряжения, воздействующего на электронный блок БПЧ 9 и устанавливает тем самым определенную частоту. В данном режиме с четвертого выхода СУ 10 поступает напряжение (+C1), которое открывает дополнительный приемник 2 и первый коммутатор 17 и закрывает приемник 5. Принцип функционирования и схема построения дополнительного приемника 2 приведены в [14]. С пульта управления 10-4 через второй выход СУ 10 поступает напряжение, которое запирает первый ФИ 16. Напряжение с третьего выхода СУ 10 подключает с помощью второго коммутатора 34 второй вход УМ 33 к выходу модулятора 22 [л. 13, с. 90]. Второй выход НО 24 в этом случае от входа УМ 33 будет отключен.
Работа устройства в режиме Р2-1 поясняется фиг. 2. Синхронизируемый импульсами, поступающими с выхода БГИЗ 18, второй ФИ 24, работу которого разрешает напряжение с пульта управления 10-4, поступающее через первый выход СУ 10, формирует видеоимпульсы (У7) длительностью Tи, которые, поступая на вход модулятора 22, обеспечивают прохождение шумового сигнала с первого выхода НО 23 на второй коммутатор 34. Одновременно видеоимпульсы (У7) закрывают дополнительный приемник 2 на время излучения зондирующего импульса. Длительность шумового зондирующего импульса (Tи) определяется максимальной реализуемой длительностью обрабатываемых сигналов ДУЛЗ. В настоящее время ДУЛЗ, выполненные на ПАВ, способны обрабатывать сигналы длительностью 150 мкс [15] , поэтому в предлагаемом варианте реализации устройства выбрано Tи = 100 мкс. Шумовые зондирующие радиоимпульсы с второго коммутатора после усиления в УМ 33 излучаются передающей антенной в направлении разведуемого объекта. Одновременно поступая в третий смеситель 28 радиоимпульсы (У8) преобразуются на промежуточную частоту. Для этого на второй вход смесителя 28 поступает напряжение с выхода гетеродина дополнительного приемника 2, выполненного по супергетеродинной схеме.
Первый и второй смесители 29, 31 совместно с первой и второй ДУЛЗ 30, 25 образуют управляемую линию задержки. Управление величиной задержки осуществляется напряжением гетеродина 32.
Обе ДУЛЗ имеют один и тот же линейный закон зависимости задержки от частоты с одинаковой девиацией и максимальной задержкой Тз, но обратный наклон характеристики (фиг. 5).
Частота гетеродина 32 определяет положение входного сигнала первой ДУЛЗ 30 на частотной оси и, таким образом, его задержку Tз, на выходе ДУЛЗ 30 (фиг. 5в). Второй смеситель 31 осуществляет перенос сигнала на исходную частоту fпр. В принципе, уже на выходе второго смесителя 31 мы имеем исходный сигнал, задержка которого плавно регулируется за счет перестройки гетеродина 32. Но входной спектр сигнала искажается за счет дисперсионных свойств ДУЛЗ 30. Для компенсации этих искажений введена ДУЛЗ 25 с обратным наклоном характеристики 2 (фиг. 5б) по отношению к характеристике 1 ДУЛЗ 30. Задержка поступающего на вход ДУЛЗ 25 сигнала на частоте fпр получает строго постоянное приращение ΔTз не зависящее от частоты гетеродина 32 [л. 16, с. 271], которое компенсируется задержкой принятого полезного сигнала МЛЗ 4 [л. 17, с. 92] до первого отвода, т.е. задержка между сигналом, приходящим на вход МЛЗ 4, и сигналом, снимаемым с ее первого выхода, составляет ΔTз .
Изменение величины задержки по закону tз = t - (n - 1)T0, где n - номер периода следования импульсов, обеспечивает наличие на выходе второй ДУЛЗ 25 задерживаемого сигнала в течение всего периода T0. Затем задержка уменьшается сигналом до нуля и на выходе ДУЛЗ 25 появляется импульс следующего периода, после чего все повторяется. МЛЗ 4, умножители 7-1...7-n и первый сумматор 13 образуют оптимальный фильтр принятого шумового импульса, на выходе которого осуществляется его сжатие на величину базы ΔfΔT как показано на фиг. 2. Сжатый сигнал после детектора [л. 5, с. 213] поступает на вход рециркулятора 19 [л. 18, с. 224]. В рециркуляторе осуществляется межпериодное некогерентное накопление пачки импульсов и формируется сигнал У13.
При превышении этим сигналом величины порога У0 в ПУ 15 в результате ограничения сигнала У13 снизу формируется сигнал У14. При поступлении этого сигнала в СИ 6 по результату счета тактовых импульсов У15, поступающих с выхода ГТИ 3, формируется код, соответствующий дальности до объекта, который поступает на внешние системы целеуказания. Сигнал У14 с выхода ПУ 15 подается также на вход индикатора 21, где может обнаруживаться визуально оператором, и на вход реле захвата 11 [л. 19, с. 85]. Работа устройства в режиме Р2-2 (создание квазинепрерывных помех) поясняется фиг. 3, при этом возникает необходимость в автосопровождении объекта по дальности, т.е. излучение помехи должно периодически прерываться на время приема отраженного от объекта сигнала. Для переключения станции в режим автосопровождения по дальности входят: первый и второй умножители напряжения 35, 36, первый и второй интеграторы 37, 38, генератор строб-импульса 41, линия задержки 40 [л. 17, с. 74], второй сумматор 13, УВ 42.
Первоначально оператор станции получает целеуказание от внешних систем о дальности до объекта и на пульте управления 10-4 выставляет с помощью потенциометра напряжение, которое подается с шестого выхода СУ 10 на устройство вычитания 42 [л. 20, с. 155] устанавливая тем самым стробы дальности на необходимую дальность. Функционирование системы автосопровождения объекта по дальности поясняет фиг. 4. В момент времени T01, когда центр "тяжести" (отраженного от объекта) сигнала находится строго между незадержанным и задержанным строб-импульсами, напряжение на выходе УВ 42 равно нулю. При смещении отраженного от объекта сигнала относительно стробов в сторону больших дальностей (момент времени T02) его большая часть попадает в задержанный строб. На выходе УВ 42 появляется отрицательное напряжение, которое, поступая на вход второго сумматора 13, "опускает" напряжение пилы, поступающее с выхода ГПН 26. Генератор строб-импульса выполнен по схеме триггера Шмидта с порогом срабатывания У00. Смещение пилы приводит к более позднему запуску ГС 41, т.е. к смещению строб-импульса в сторону больших дальностей. При смещении отраженного от объекта сигнала относительно стробов в сторону меньших дальностей (момент времени T03) его большая часть попадает в незадержанный строб. На выходе УВ 42 появляется положительное напряжение, которое, поступая на вход второго сумматора 13, "поднимает" напряжение пилы, поступающее с выхода ГПН 26, и смещает строб в сторону меньших дальностей до тех пор, пока центр "тяжести" отраженного от объекта сигнала не окажется между стробами. Таким образом осуществляется автоматическое сопровождение объекта по дальности.
Полученный суммарный строб-импульс, поступающий с выхода третьего сумматора 39 на третий вход первого коммутатора 17, запирает его, бланкируя таким образом излучение помехи на время приема сигнала, отраженного от объекта дополнительным приемником 2, который отпирается этим же суммарным строб-импульсом.
Режим Р3 отличается от режима Р2-2 тем, что полярность напряжения, поступающего с четвертого выхода СУ 10, меняется, обеспечивая периодическое включение устройства в режим Р1, по результатам РТР которого настраивается генератор шума 14 на частоту подаваемого РЭС.
Очевидно, что изобретение не ограничивается вышеописанным примером его реализации. Исходя из него могут быть предусмотрены и другие варианты технической реализации, не выходящие за рамки предмета изобретения. Например, для обеспечения большего диапазона изменения времени задержки на управляемой линии задержки ΔTΣ , чем может позволить одна ДУЛЗ, можно включить несколько (K) линий задержек, частотно-временная характеристика которых приведена на фиг. 5а, последовательно через усилители промежуточной частоты. В этом случае ΔTΣ = kΔT. Могут быть также использованы другие типы управляемых линий задержек, реализуемые не на базе элементов ПАВ, а элементов вычислительной техники с применением аналого-цифровых преобразователей и запоминания сигнала в цифре. Могут также использоваться другие типы систем слежения за временным положением импульсов по дальности [21] и т.п.
Конструкция предлагаемого устройства основана на использовании известных элементов и технических трудностей для реализации не представляет. Уровень развития элементной базы на ПАВ позволяет уже в настоящее время обрабатывать широкополосные сигналы с базой 5•103 [15].
Технико-экономическая оценка эффективности предлагаемого устройства по сравнению с прототипом и другими известными решениями, проведенная с помощью теоретических оценок и расчетов, показала следующее.
Расчет требуемой мощности на выходе УМ 33 и реализуемой чувствительности приемника 2.
Проведем расчет требуемой мощности шумового сигнала на выходе УМ 33 для обеспечения дальности радиолокационной разведки истребителя противника (σц = 10 м2) на дальности R = 200 км
где G1, G2 - коэффициенты усиления прямой и передающей антенн 1, 27 соответственно;
λ - длина волны;
Pm - минимальная мощность отраженного сигнала на входе дополнительного приемника, при котором обеспечивается его обнаружение с заданным качеством
Pm= kTШΔfγLB-1M-1,
где k - постоянная Больцмана;
T - абсолютная температура;
Ш, Δf - коэффициент шума и полоса пропускания дополнительного приемника 2;
γ - коэффициент различимости сигнала, обеспечивающий заданное качество обнаружения;
L - потери на обработку, учитывающие и потери на некогерентное накопление импульсов рециркулятором 20;
B = ΔfΔT - база задержанного шумового импульса;
M - количество импульсов в пачке.
Принимая в качестве примера для расчетов: Ш = 5, Δf = 10 МГц, L = 10, γ = 10, ΔT = 100 мкс, M = 20, λ = 7 см, получим Pm = 5•10-17 Вт, Pn = 1 кВт.
Такая мощность передатчика помех может быть реализована. При использовании в перспективе в качестве УМ 33 гиротронов-усилителей или пучково-плазменных усилителей мощность сигнала на выходе которых может достигать до 120 кВт [22, 23, 24], можно реализовать радиолокационную разведку на дальностях до 600 км и более. Дальность радиолокационной разведки может быть увеличена и за счет увеличения базы обрабатываемого сигнала (B) при развитии техники на ПАВ [15].
Таким образом возможность реализации, приемлемой для задач радиоэлектронного подавления дальности радиолокационного обнаружения в предлагаемом устройстве, сомнений не вызывает.
Известно [10-12], что шумовой сигнал обладает наибольшими потенциальными возможностями по помехоустойчивости и скрытности. Использование шумового сигнала позволяет достигнуть увеличения отношения сигнал-помеха на выходе коррелятора на величину базы сигнала (B). Это позволяет повысить помехозащищенность радиолокационного приема и снизить требования к импульсной мощности передатчика, т. е. повысить скрытность радиолокационного режима. Таким образом повышение эффективности станции помех за счет совмещения режимов радиолокационного обнаружения и создания помех достигнуто.
Литература
1. Вакин С. А. , Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. - М.: Сов. радио, 1968.
2. Ерофеев Ю.Н. Основы импульсной техники. - М.: Высш. школа, 1979.
3. Приемные устройства радиолокационных сигналов, часть 1. Под ред. Седышева Ю.Н. - М.: Воениздат, 1978.
4. Проектирование радиолокационных приемных устройств. Под ред. Соколова М.А. - М.: Высшая школа, 1984.
5. Белкин М. К. и др. Справочник по учебному проектированию приемных устройств. - Киев: Высшая школа, 1988.
6. Фильтры на поверхностных акустических волнах. Расчет, технология и применение. Под ред. Меттьюза Г. - М.: Радио и связь, 1981.
7. Ушаков В.Н., Долженко О.В. Электроника от транзистора до устройства. - М.: Радио и связь, 1982.
8. Мэндл М. 200 избранных схем радиоэлектроники. Пер. с англ. Ицхоки. - М.: Мир, 1980.
9. Хромой Б.П., Моисеев Ю.Г. Электрорадиоизмерения. -М.: Радио и связь, 1985.
10. Ширман Я. Д. Теоретические основы радиолокации. - М.: Сов. радио, 1970.
11. Свистов В. М. Радиолокационные сигналы и их обработка. -М.: Сов. Радио, 1977.
12. Варакин Л.Е. Теория сложных сигналов. - М.: Сов. радио, 1970.
13. Справочник по радиолокации, часть 2. Под ред. Сколника М. - М.: Сов. радио, 1977.
14. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. -М.: Радио и связь, 1984.
15. Речицкий В.И. Радиокомпоненты на поверхностных акустических волнах. - М.: Сов. радио, 1984.
16. Радиоприемные устройства. Под ред. В.И. Сифорова. - М.: Сов. радио, 1974.
17. Речицкий В.И. Акусто-электронные радиокомпоненты. Схемы, топология, конструкции. - М.: Радио и связь, 1987.
18. Лезин Ю.С. Введение в теорию и технику радиотехнических систем. - М. : Радио и связь, 1986.
19. Теоретические основы радиолокации. Под ред. В.Е. Дулевича. - М.: Сов. радио, 1964.
20. А.Г.Алексеенко, Е.А. Коломбет, Г.И. Стародуб. Применение аналоговых интегральных схем. - М.: Радио и связь, 1981.
21. Вопросы статистической теории радиолокации. Под. ред. Тартаковского Г.П. - М.: Сов. радио, 1963.
22. Нусинович Г.С. Гиротроны-источники мощного электромагнитного излучения ММВ. "Зарубежная радиоэлектроника", 11, 1984.
23. Symons R.S et al. IEEE Trans MTT - 29, 3, 1981.
24. Ежеквартальный бюллетень по проблемам научно-технического сотрудничества с зарубежными странами "Эколинк", 1996.9
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНЦИЯ ПОМЕХ | 1993 |
|
RU2054806C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 1994 |
|
RU2054807C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ | 2002 |
|
RU2237907C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2001 |
|
RU2217874C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПРИЦЕЛЬНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2006 |
|
RU2329603C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ОТВЕТНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2002 |
|
RU2237372C2 |
| Многоканальное автоматизированное устройство для противодействия радиолокационной разведке | 2021 |
|
RU2777376C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1994 |
|
RU2083995C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134431C1 |
| Бортовая радиолокационная станция | 2016 |
|
RU2609156C1 |

Изобретение относится к области радиотехники и позволяет осуществлять радиотехническую и радиолокационную разведку объектов и создавать на основании ее результатов прицельные по частоте и направлению помехи радиоэлектронным средствам противника. Данный технический результат достигается тем, что шумовой сигнал, излучаемый станцией, используется как в качестве зондирующего, так и в качестве помехового. Это обеспечивает возможность использования в станции лишь одного передатчика. Для сжатия шумового сигнала в устройство дополнительно введены многоотводная линия задержки, максимальная длительность задержки сигнала которой соответствует длительности обрабатываемого шумового импульса, а также управляемая (в диапазоне, соответствующем диапазонам просматриваемых дальностей) линия задержки. Обе линии предложено реализовать на ПАВ. 7 ил.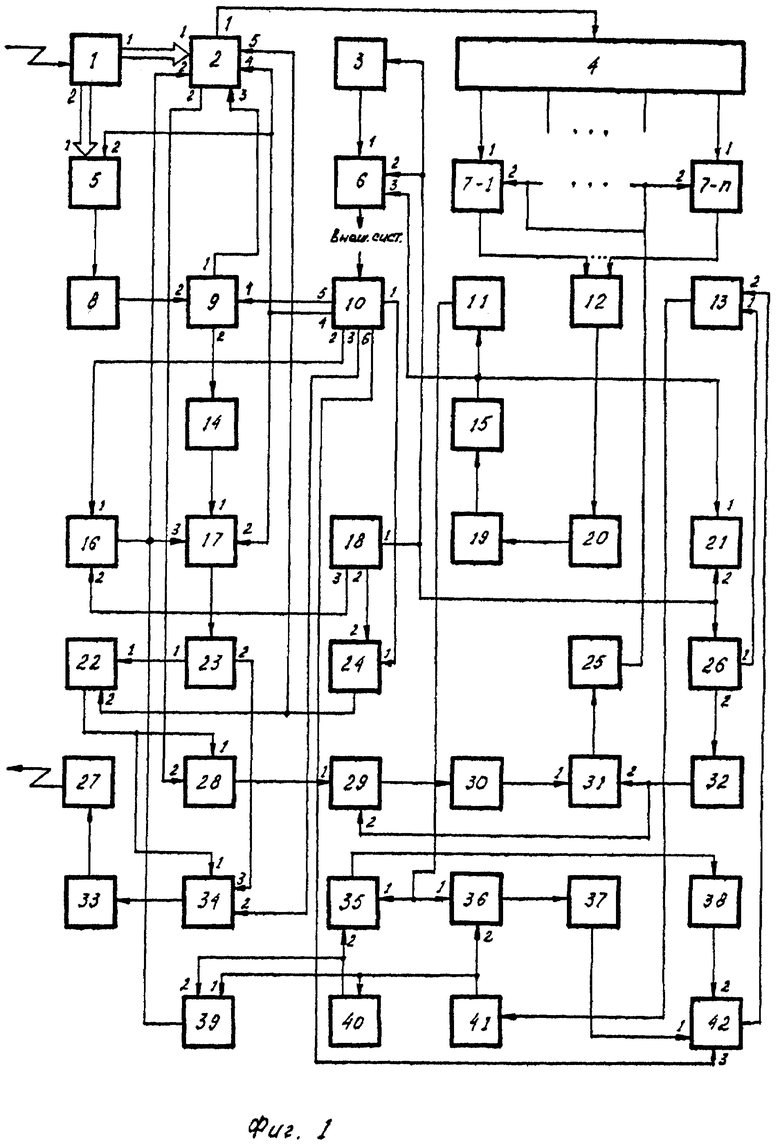
Станция шумовых помех, содержащая приемную и передающую антенны, приемник, систему запоминания частоты, блок перестройки частоты, генератор шума, усилитель мощности, причем второй выход приемной антенны соединен с первым входом приемника, выход которого соединен с входом системы запоминания частоты, выход которой соединен со вторым входом блока перестройки частоты, второй выход которого соединен со входом генератора шума, выход усилителя мощности соединен со входом передающей антенны, отличающаяся тем, что введены дополнительный приемник, первый и второй коммутаторы, направленный ответвитель, многоотводная линия задержки (МЛЗ), n умножителей, система управления, первый, второй и третий сумматоры, модулятор, детектор, рециркулятор, пороговое устройство, реле захвата, первый и второй формирователи импульсов, индикатор, блок генераторов импульсов запуска, первая и вторая дисперсионные ультразвуковые линии задержки (ДУЛЗ), генератор пилообразного напряжения, первый, второй и третий смесители, гетеродин, первый и второй интеграторы, первый и второй умножители напряжения, устройство вычитания, генератор строб-импульса, линия задержки, причем первый выход дополнительного приемника, первый вход которого соединен с первым выходом приемной антенны, второй вход которого соединен с выходом первого формирователя импульсов и выходом третьего сумматора, третий вход которого соединен с первым выходом блока перестройки частоты, четвертый вход которого соединен с четвертым выходом системы управления, пятый вход которого соединен с выходом второго формирователя импульсов, соединен с входом МЛЗ, n выходов которой соединены с первыми входами n умножителей, выход первого сумматора, n входов которого соединены с выходами n умножителей, соединен с входом детектора, выход рециркулятора, вход которого соединен с выходом детектора, соединен с входом порогового устройства, выход реле захвата, вход которого соединен с выходом порогового устройства, соединен с первыми входами первого и второго умножителей напряжения, выход первого умножителя напряжения, второй вход которого соединен с выходом линии задержки, соединен с входом второго интегратора, выход второго умножителя напряжения, второй вход которого соединен с выходом генератора строб-импульса, соединен с входом первого интегратора, выход устройства вычитания, первый и второй входы которого соединены соответственно с выходами первого и второго интеграторов, соединен с вторым входом второго сумматора, а третий вход соединен с шестым выходом системы управления, выход второго сумматора, первый вход которого соединен с первым выходом генератора пилообразного напряжения, соединен с входом генератора строб-импульса, а выход последнего соединен с входом линии задержки и первым входом третьего сумматора, выход третьего сумматора, второй вход которого соединен с выходом линии задержки, соединен с третьим входом первого коммутатора, выход гетеродина, вход которого соединен с вторым выходом генератора пилообразного напряжения, соединен с вторыми входами первого и второго смесителей, выход первого смесителя, первый вход которого соединен с выходом третьего смесителя, соединен с входом первой ДУЛЗ, второй вход третьего смесителя соединен с вторым выходом дополнительного приемника, а его первый вход - с выходом модулятора, выход второго смесителя, первый вход которого соединен с выходом первой ДУЛЗ, соединен с входом второй ДУЛЗ, выход последней соединен с вторыми входами n умножителей, первый выход блока генераторов импульсов запуска соединен с входом генератора тактовых импульсов, вторым входом счетчика импульсов, входом генератора пилообразного напряжения, вторым входом индикатора, выход второго коммутатора, первый вход которого соединен с выходом модулятора, второй - с третьим выходом системы управления, третий - с вторым выходом направленного ответвителя соединен с входом усилителя мощности, выход второго формирователя импульсов, второй вход которого соединен с вторым выходом блока генераторов импульсов запуска, а первый - с первым выходом системы управления, соединен с вторым входом модулятора, выход счетчика импульсов, первый вход которого соединен с выходом генератора тактовых импульсов, третий - с выходом порогового устройства, соединен с внешними системами целеуказания, выход порогового устройства соединен с первым входом индикатора, выход первого коммутатора, первый вход которого соединен с выходом генератора шума, второй вход - с четвертым выходом системы управления, соединен с входом направленного ответвителя, первый выход которого соединен с первым входом модулятора, третий выход блока генератора импульсов запуска соединен со вторым входом первого формирователя импульсов, первый вход которого соединен со вторым выходом системы управления, четвертый выход системы управления, вход которой соединен с внешними системами целеуказания, соединен со вторым входом приемника, пятый выход системы управления соединен с первым входом блока перестройки частоты.
| Вакин С.А., Шустов Л.Н | |||
| Основы радиопротиводействия и радиотехнической разведки | |||
| - М.: Сов | |||
| радио, 1968, с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| US 3896439 A1, 22.07.75 | |||
| RU 94024306 A1, 17.04.96 | |||
| DE 3346155 A1, 18.12.85. | |||
