Изобретение относится к ручному инструменту для проведения сборочно-разборочных работ, а именно для демонтажа пальца кривошипа станка-качалки.
Известно устройство для отвинчивания и тарированного затягивания крепежных элементов (1), содержащее корпус, размещенную в нем с возможностью вращения рабочую головку с центральным гнездом, рукоятку, установленную в корпусе с возможностью поворота и подпружиненную в тангенциальном направлении плоской возвратной пружиной, охватывающий рабочую головку гибкий элемент, один конец которого связан с корпусом посредством пружины, другой связан с рукояткой, и снабженное сменными пружинами и сменной головкой-насадкой.
Известен съемник (2), содержащий полый корпус с радиальными пазами, соединенный с ним, с возможностью осевого перемещения силовой элемент, имеющий коническую поверхность, и предназначенные для взаимодействия с ней штыри-зацепы, размещенные в радиальных пазах с возможностью перемещения, а силовой элемент выполнен в виде охватывающего корпус пуансона с внутренней конической поверхностью, радиальные пазы выполнены на торце корпуса, обращенном к снимаемой детали, штыри-зацепы подпружинены относительно корпуса в радиальном направлении, а на их рабочей поверхности выполнены зубцы, выступающие из пазов корпуса.
Недостатком данных устройств является сложность конструкции, что ограничивает область их применения.
Наиболее близким к предлагаемому рычажному съемнику, выбранному в качестве прототипа, является винтовой съемник (3), содержащий корпус с силовым винтом, смещенным относительно силового винта, а также закрепленным на корпусе опорным рычагом и взаимодействующим с ним регулируемым упором, при этом захват и опорный рычаг закреплены на корпусе шарнирно.
Однако данный винтовой съемник не позволяет осуществлять монтаж и демонтаж в труднодоступных местах, например при съеме пальца кривошипа станка-качалки в тех случаях, когда палец установлен в близкорасположенных к валу редуктора отверстиях (в первом, втором) из-за ограниченного пространства между телом кривошипа и корпусом редуктора, что имеет место на румынских станках-качалках УП-9 (H=280 мм).
Целью изобретения является расширение технологических возможностей с одновременным упрощением конструкции.
Для достижения поставленной цели рычажный съемник для снятия пальца кривошипа станка-качалки содержит рычаг, связанный с конечными и промежуточной опорами, причем шарнирная промежуточная опора выполнена в виде захвата, а конечные снабжены пятами. Одна из конечных опор установлена с возможностью взаимодействия с приводным винтом, а другая - со снимаемым изделием. Захват установлен в ближайшем отверстии кривошипа посредством серьги со специальным болтом, конец рычага снабжен пятой, а приводной винт установлен в отдаленном от пальца кривошипа отверстии. За счет разности плеч между точками приложения сил в рычаге достигается выигрыш в силе для снятия пальца.
На фигуре 1 изображен рычажный съемник.
Рычажный съемник содержит рычаг 1 с пятой 2, которая контактирует со снимаемым изделием (пальцем 3 с гайкой 4 кривошипа 5). Шарнирный промежуточный захват (служащий одной из опор) состоит из серьги 6 со специальным болтом 7. Другая конечная опора с пятой 8 контактирует с приводным винтом 9, соединенным с центрирующей гайкой 10.
В качестве привода может быть использован, например, гидравлический цилиндр.
Рычаг 1 одним концом опирается на головку снимаемого пальца 3, другим - на приводной винт 9 с центрирующей гайкой 10, за счет чего достигается выигрыш в силе для снятия пальца кривошипа станка-качалки.
Работа рычажного съемника осуществляется следующим образом: перед монтажом рычажного съемника необходимо отвернуть гайку 4 пальца 3 и снять шайбу (не указана), расположенную под гайкой 4. Снова завернуть гайку 4 настолько, чтобы торец пальца 3 утопал в гайке 4, образовав углубление под пяту 2 рычага 1, для обеспечения фиксации рычага 1 от продольного смещения. Рычаг 1 завести в серьгу 6, соединить серьгу 6 со специальным болтом 7. Установить в отдаленном от пальца 3 кривошипа 5 отверстии приводной винт 9 с центрирующей гайкой 10.
Рычажный съемник смонтирован. Вращают приводной винт 9 с помощью накидного ключа (не показан), создают усилие на рычаг 1, который в свою очередь опираясь о серьгу 6, оказывает давление на торец снимаемого пальца 3.
Такое выполнение рычажного съемника сокращает время на монтаж и демонтаж пальца кривошипа станка-качалки, улучшает обслуживание и повышает производительность труда при ремонтных работах.
Источники информации:
1. Патент РФ N 2081737 B 25 B 13/06, 23/142
2. Патент РФ N 2081742 B 25 B 27/28
3. Авт.св. СССР N 856784 B 25 B 27/02 прототипн
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ ШКИВ ДЛЯ ФОРСИРОВАНИЯ ШТАНГОВОЙ СКВАЖИННОЙ НАСОСНОЙ УСТАНОВКИ | 1997 |
|
RU2140017C1 |
| УНИВЕРСАЛЬНЫЙ ШКИВ ДЛЯ ФОРСИРОВАНИЯ ШТАНГОВОЙ СКВАЖИННОЙ НАСОСНОЙ УСТАНОВКИ | 1996 |
|
RU2105902C1 |
| ЗАЖИМ ДЛЯ УДЕРЖАНИЯ КОЛОННЫ НАСОСНЫХ ШТАНГ | 1998 |
|
RU2151263C1 |
| УНИВЕРСАЛЬНЫЙ ШКИВ ДЛЯ ФОРСИРОВАНИЯ СКВАЖИННОЙ ШТАНГОВОЙ НАСОСНОЙ УСТАНОВКИ | 2000 |
|
RU2163310C1 |
| ЗАЖИМ ДЛЯ УДЕРЖАНИЯ КОЛОННЫ НАСОСНЫХ ШТАНГ | 1998 |
|
RU2151262C1 |
| УНИВЕРСАЛЬНЫЙ ШКИВ ДЛЯ ФОРСИРОВАНИЯ ШТАНГОВОЙ СКВАЖИННОЙ НАСОСНОЙ УСТАНОВКИ | 1998 |
|
RU2145002C1 |
| ЗАЖИМ ДЛЯ УДЕРЖАНИЯ КОЛОННЫ НАСОСНЫХ ШТАНГ | 1994 |
|
RU2091560C1 |
| СКВАЖИННАЯ ШТАНГОВАЯ НАСОСНАЯ УСТАНОВКА | 1992 |
|
RU2028510C1 |
| СЪЕМНИК | 1990 |
|
RU2009868C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ТРУБ ПРИ ПОДЪЕМЕ ИЗ СКВАЖИНЫ | 1991 |
|
RU2023869C1 |
Изобретение относится к ручному инструменту для проведения сборочно-разборочных работ, а именно для демонтажа пальца кривошипа станка-качалки. Рычажный съемник для снятия пальца кривошипа станка-качалки содержит рычаг, связанный с конечными и промежуточными опорами. Промежуточная опора выполнена шарнирной в виде захвата, а конечные снабжены пятами. Одна из конечных опор установлена с возможностью взаимодействия с приводным винтом, а другая - со снимаемым изделием. Захват выполнен в виде серьги с болтом, установленным в ближайшем от снимаемого пальца отверстии кривошипа, а приводной винт установлен в отдаленном от пальца кривошипа отверстии. В результате расширяются технологические возможности инструмента и упрощается его конструкция. 1 ил.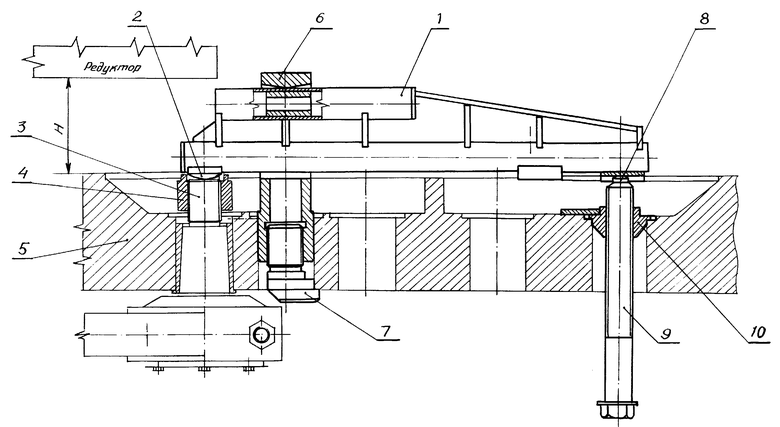
Рычажный съемник для снятия пальца кривошипа станка-качалки, содержащий рычаг, связанный с конечными и промежуточной опорами, причем промежуточная опора выполнена шарнирной в виде захвата, а конечные снабжены пятами, одна из конечных опор установлена с возможностью взаимодействия с приводным винтом, а другая - со снимаемым изделием, отличающийся тем, что захват выполнен в виде серьги с болтом, установленным в ближайшем от снимаемого пальца отверстия кривошипа, а приводной винт установлен в отдаленном от пальца кривошипа отверстии.
| Винтовой съемник | 1976 |
|
SU856784A1 |
| Устройство для выпрессовки пальцевшКВОРНЕй пОВОРОТНыХ КулАКОВ КОлЕСТРАНСпОРТНОгО СРЕдСТВА | 1978 |
|
SU808344A1 |
| Приспособление для демонтажа изделий | 1983 |
|
SU1227451A1 |
| Загрузочное устройство | 1983 |
|
SU1466910A2 |
