(54) ВИНТОВОЙ СЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАЖНЫЙ СЪЕМНИК | 1998 |
|
RU2151053C1 |
| Автомат для изготовления деталей из ленточного материала | 1988 |
|
SU1634352A1 |
| Съемник | 1989 |
|
SU1701513A1 |
| ГИДРАВЛИЧЕСКИЙ СЪЕМНИК | 1996 |
|
RU2130377C1 |
| ГИДРАВЛИЧЕСКИЙ СЪЕМНИК | 1991 |
|
RU2009870C1 |
| Станок для срезания накладок тормозных колодок | 1985 |
|
SU1301585A1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ИЗНОШЕННЫХ ДЕТАЛЕЙ | 2008 |
|
RU2391199C1 |
| Загрузочно-разгрузочное устройство | 1984 |
|
SU1199578A1 |
| СЪЕМНИК | 2004 |
|
RU2374042C2 |
| Устройство для разделения прутковогоМАТЕРиАлА HA зАгОТОВКи | 1978 |
|
SU841804A1 |
I
Изобретение относится к машиностроению, а более конкретно к приспособлениям для проведения сборочноразборочных работ.
Известен винтовой съемник, преимущественно, для демонтажа рычагов, содержащий корпус с силовым винтом и захватом, смещенным относительно силового винта. Винтовой съемник предназначен для демонтажа деталей, д:меющих прямолинейные образукяцие СП.
Недостатком является то, что демонтаж криволинейных деталей данным съемником без изменения или дополнения его конструкции произвести нельзя.
Цель изобретения - расширение технологических возможностей винтового съемника.
Для достижения поставленной цели винтовой съемник снабжен закрепленными на корпусе опорным рычагом и взаимодействующим с ним регулируемым упо2
ром, при этом захват и опорный рычаг закреплены на корпусе шарнирно.
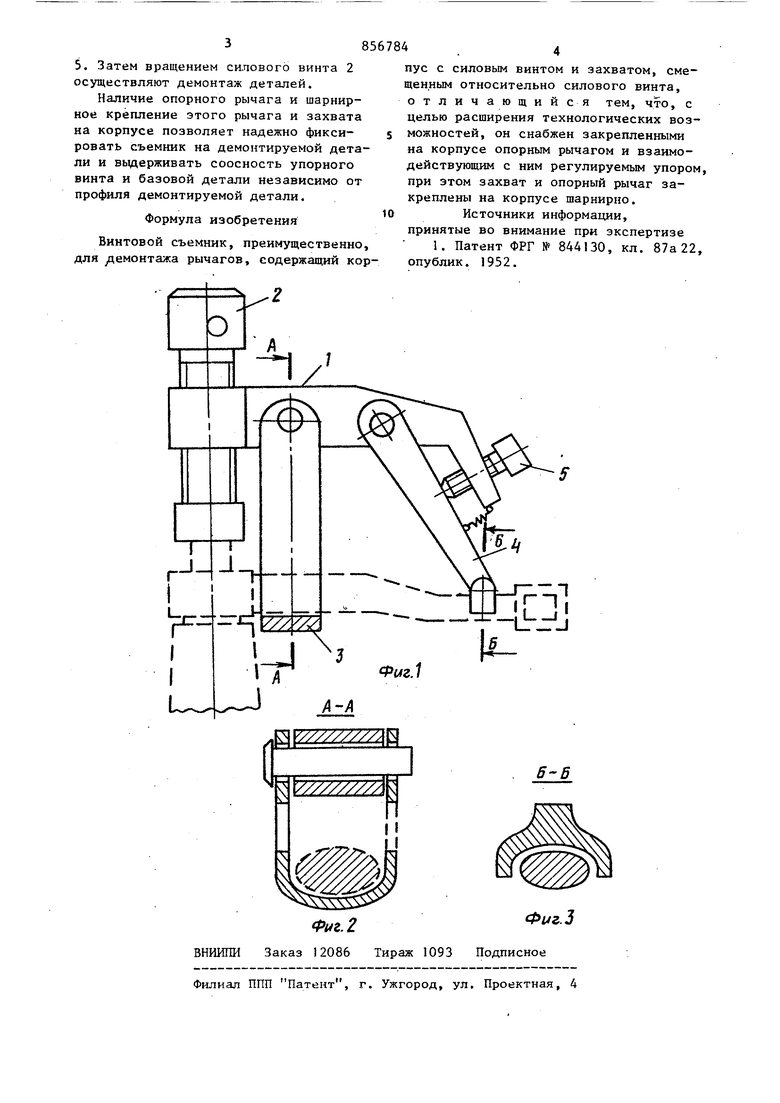
На фиг. 1 изображен винтовой съемник, общий.вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. I.
Винтовой съемник содержит корпус 1 с силовым винтом 2 и захватом 3, смещенным относительно силового винта. Съемник также снабжен закреплен10ными на корпусе опорным рычагом 4 и взаимодействующим с ним регулируемым упором 5. Захват 3 и опорный рычаг 4 закреплены на корпусе 1 шарнирно.
15
Работа винтового съемника осуществляется следующим образом.
Захват 3, предварительно снятый со съемника, подводят под демонтиру емую деталь сопряженного узла ( показан пунктиром; и закрепляют на корпусе I. Силовой винт 2 упирают в базовую деталь. Опорный рычаг 4 упирают в деталь и поджимают регулируемым упором
