Предлагаемое изобретение относится к области авиационной техники, а именно к летательным аппаратам (ЛА) с глиссирующим крылом.
Известны легкие СА Бе-103 и Р-50 (1), содержащие лодку, силовую установку, хвостовое оперение и глиссирующее немеханизированное крыло, выполненное с положительным углом поперечного V таким образом, что поверхности управления самолетом по крену (элероны) расположены на концах консолей и не соприкасаются с водой на всех режимах движения ЛА.
Отсутствие механизации на крыле ухудшает взлетно-технические характеристики ЛА, а именно:
- увеличивает дистанцию разбега, что требует увеличения длины взлетной полосы на суше, а на воде - базирования на более крупных водоемах;
- увеличивает посадочную скорость, что приводит к увеличению перегрузок на конструкцию при посадках и, соответственно, требует увеличения весовых затрат на прочность конструкции, за счет снижения полезной нагрузки или за счет ухудшения летно-технических характеристик ЛА.
Известен принятый за прототип гидросамолет с высокой аэродинамической эффективностью по патенту США (2), содержащий глиссирующее крыло с положительным углом поперечного V, поперечными реданами, расположенными в центральной нижней части крыла, фюзеляж, силовую установку и хвостовое оперение. Механизация крыла выполнена на не омываемом водой участке крыла на всех режимах движения ЛА, и этот участок расположен вблизи от элеронов, а такая механизация частично способствует улучшению взлетно-посадочных характеристик. Механизация крыла в отклоненном положении в воздухе на режимах взлета и посадки, наряду с увеличением коэффициента подъемной силы (Cy), дает одновременно пикирующий момент (Mz), который неблагоприятно складывается на управление самолетом, или же необходима компенсация этого момента известными средствами, такими как переставной стабилизатор и др. В зависимости от величины пикирующего момента соответствуют такие затраты, как весовые, усложнение конструкции и усложнение техники пилотирования ЛА.
Задачей предлагаемого изобретения является устранение неблагоприятных пикирующих моментов от взлетно-посадочной механизации и улучшение взлетно-посадочных характеристик СА.
Технический результат достигается тем, что в СА, содержащем лодку, хвостовое оперение и глиссирующее механизированное крыло с положительным углом поперечного V, щитки или закрылки установлены на омываемом водой участке крыла подвижно-поворотно в отклоненном на рабочий угол положении с возможностью прижатия щитков к крылу, а закрылка - до положения исходного профиля крыла, под воздействием водяных струй и восстановления начального положения их при отсутствии действия водяных струй, при этом размах щитков или закрылков не превышает размаха горизонтального оперения.
При отсутствии контакта с водой щитки или закрылки на режимах взлета и посадки отклонены на рабочий угол и обеспечивают (на уровне выбранной механизации) повышение коэффициента подъемной силы (Cy) в отличие от немеханизированного крыла аналога и частично механизированного крыла прототипа.
Размах щитков или закрылков не должен превышать размах горизонтального оперения (ГО), поскольку на последнем создается пикирующий момент, компенсирующий момент от механизации.
Сущность заявляемого устройства поясняется прилагаемыми чертежами, где:
на фиг. 1 показана боковая проекция СА;
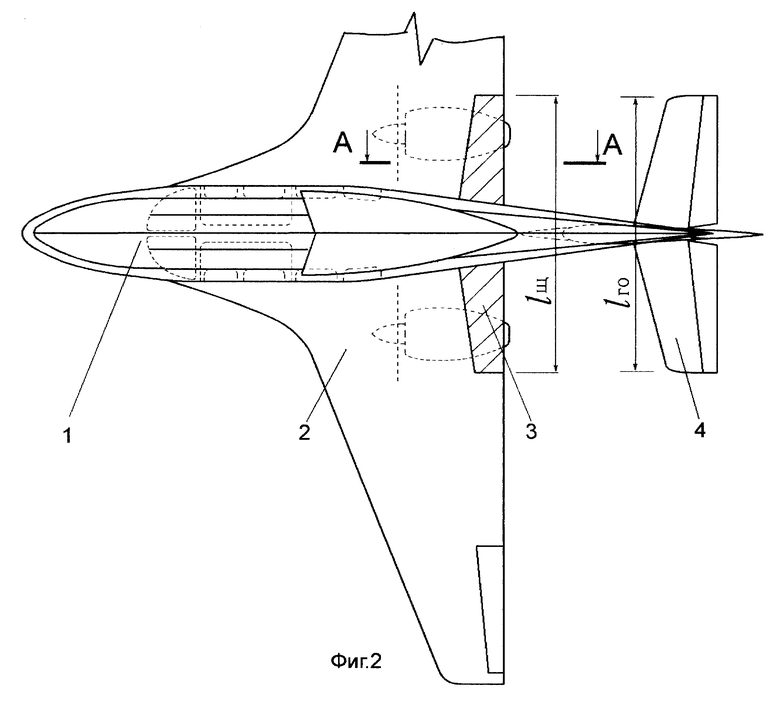
на фиг. 2 показан вид СА снизу;
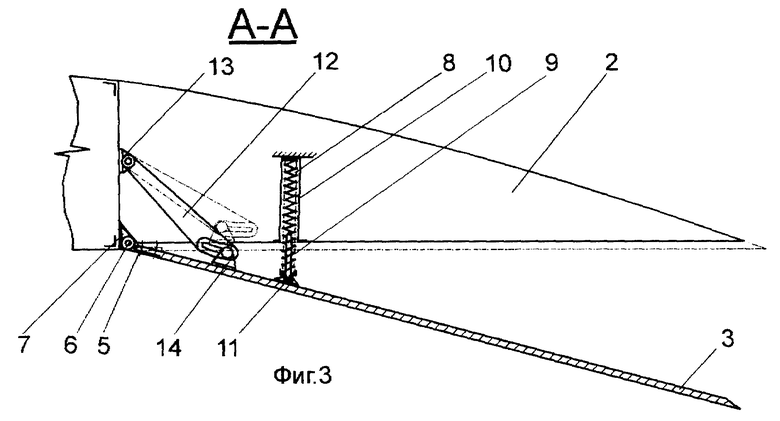
на фиг. 3 изображено сечение А-А при исполнении механизации в виде щитка;
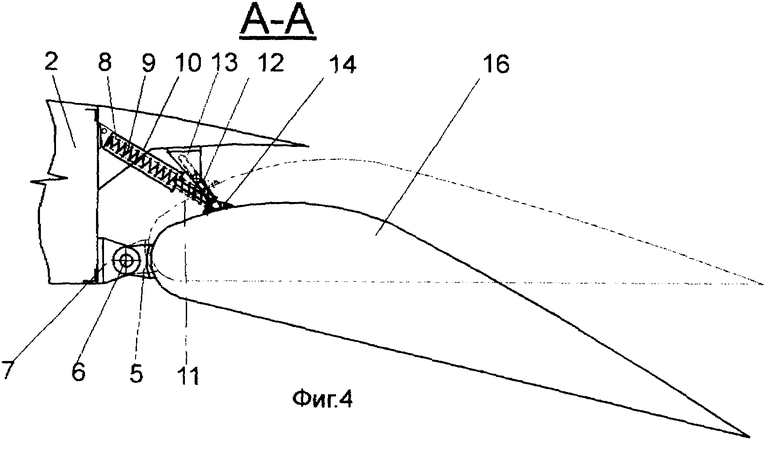
на фиг. 4 показано сечение А-А при исполнении механизации в виде закрылка;
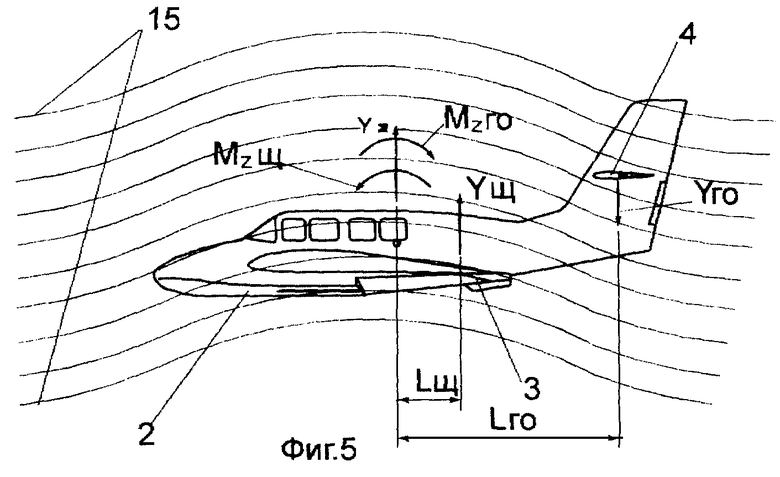
на фиг. 5 показаны "картина обтекания" СА воздушным потоком и распределение моментов;
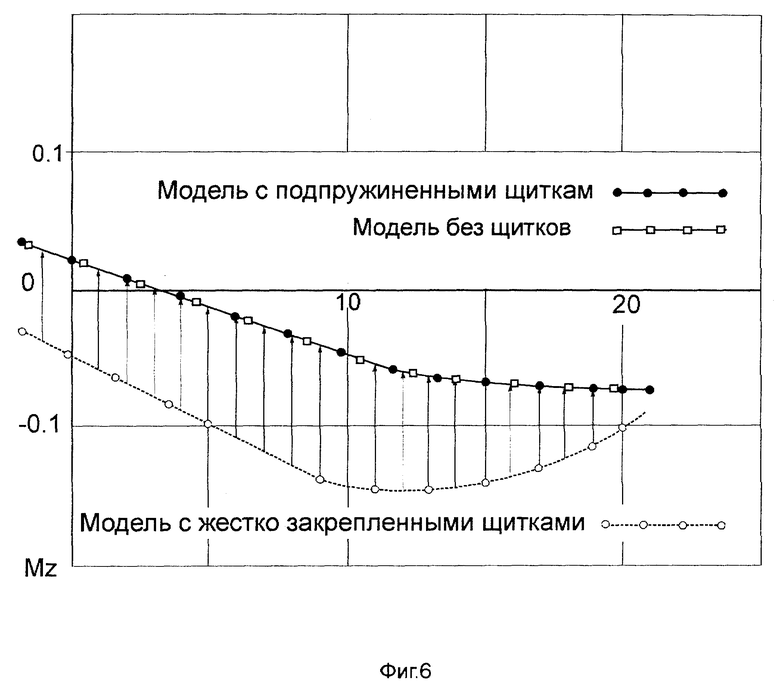
на фиг. 6 приведен график моментов Mz = f( α ).
Самолет-амфибия представляет собой лодку 1 с низкорасположенным глиссирующим крылом 2, выполненным с положительным углом поперечного V, на котором установлены щитки 3, выполненные по размаху не более размаха ГО 4. В передней части щитка 3 закреплены кронштейны 5 (фиг. 3) с осью вращения 6, которая установлена в кронштейне 7, закрепленном на неподвижной части крыла 2. За щитком 3 установлен механизм отклонения 8, состоящий из пружины 9, вставленной в направляющие с одной стороны в виде стакана 10, а с другой - в виде штыря 11, закрепленных соответственно на подвижном щитке 3 и неподвижном крыле 2. Пружина 9 в исходном положении находится с предварительным поджатием и расчитана на выдерживание усилия давления набегающего потока. Характеристика пружины 9 подобрана так, что при движении ЛА по воде при попадании на щиток 3 струй воды, она сжимается до прижатия щитка 3 к крылу 2, на котором расположен ограничитель 12, устанавливающий щиток 3 на рабочем угле. Щиток 3 закреплен подвижно-поворотно через кронштейны 13 к крылу 2 и через кронштейны 14 к щитку 3. Размах щитков (lщ) выбран из условий компенсации пикирующего момента от механизации: при движении ЛА в воздухе (фиг. 5), за счет скошенного вниз потока 15 от щитка 3 на ГО 4 возникает дополнительная аэродинамическая сила ▿ Yго, создающая кабрирующий момент Mzго = ▿ Ylго, который парирует неблагоприятный пикирующий момент Mzщ = Yго•lщ. При lщ > Iго часть скошенного потока выходит за пределы lго и момент Mzщ не будет скомпенсирован полностью, т.е. Mzщ > Mzго.
Устройство работоспособно и обеспечивает решение поставленных задач и в том случае, если вместо щитка 3 на крыле будет установлен закрылок 16 (фиг. 4).
В исходном положении, когда СА находится на стоянке или на плаву, щитки 3 (закрылки 16) удерживаются на рабочем угле при помощи ограничителей 12. При разбеге по воде СА нагрузка на щитки 3 (закрылки 16) увеличивается по мере увеличения скорости, и когда усилие на пружины 9 станет больше установленного, они сжимаются и щитки 3 (закрылки 16) поворачиваются относительно осей 6, и кронштейны 14 скользят по пазам ограничителей 12 до тех пор, пока щитки 3 не примкнут к хвостику крыла, а закрылки 16 не займут положение исходного профиля крыла 2.
При отрыве СА от воды влияние водяных струй на щитки 3 (закрылки 16) прекращается, и пружины 9, возвращаясь в исходное положение, отклоняют щитки 3 (закрылки 16), при этом кронштейны 14 скользят в обратном направлении в пазах ограничителей 12 до остановки щитков 3 (закрылков 16) на рабочий угол.
Работа устройства при посадке на воду аналогична его работе при разбеге по воде. При взлете-посадке с суши устройство не реагирует на давление воздушного потока 15 и щитки 3 (закрылки 16) все время стоят на рабочем угле.
Экспериментальные исследования модели СА Бе-103, крыло которого имеет механизацию в виде заявленных щитков (закрылков), показали, что применение ранее известных взлетно-посадочных щитков на СА с низкорасположенным крылом неприемлемо из-за создания пикирующих моментов и ухудшения характеристик продольной устойчивости при больших углах атаки, что видно из графиков (фиг. 6), а заявленное же устройство позволило полностью устранить неблагоприятные пикирующие моменты и потерю продольной устойчивости вплоть до больших закритических углов атаки (α ≈ 21o), фиг. 6.
Устройство возможно реализовать по существующей технологии и из применяемых материалов.
Источники информации:
1. "Состояние и перспективы развития малых гидросамолетов и амфибий общего назначения" Материалы научно-практического семинара, прошедшего в Гос НИЦ ЦАГИ 21 июня 1995 г. ЦАГИ, Москва, 1996 г. стр. 32, 47.
2. Патент США N4 962 978, кл. B 64 C 1/00, НКИ 244/105, 106.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСАМОЛЕТ | 2001 |
|
RU2223200C2 |
| САМОЛЕТ-АМФИБИЯ С НИЗКОРАСПОЛОЖЕННЫМ КРЫЛОМ | 2002 |
|
RU2231480C2 |
| САМОЛЕТ-АМФИБИЯ | 2004 |
|
RU2272752C1 |
| ЛЕГКИЙ САМОЛЕТ-АМФИБИЯ | 2006 |
|
RU2328413C1 |
| САМОЛЕТ-АМФИБИЯ | 2011 |
|
RU2471677C1 |
| САМОЛЕТ-АМФИБИЯ - ЛЕТНО-СПАСАТЕЛЬНЫЙ КОМПЛЕКС | 2013 |
|
RU2542800C1 |
| САМОЛЕТ-АМФИБИЯ (СА) | 2000 |
|
RU2171208C1 |
| Транспортный самолет-амфибия | 2020 |
|
RU2732523C1 |
| САМОЛЕТ-АМФИБИЯ | 2014 |
|
RU2582196C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА САМОЛЕТА-АМФИБИИ ПРИ ДВИЖЕНИИ ПО ВОДЕ В РЕЖИМЕ ГЛИССИРОВАНИЯ | 2004 |
|
RU2268157C1 |
Изобретение относится к авиационной технике и касается создания летательных аппаратов с глиссирующим крылом. Самолет-амфибия имеет лодку, хвостовое оперение и низкорасположенное глиссирующее крыло с положительным углом поперечного V и механизацией в виде щитков и закрылков. Размах щитков или закрылков не превышает размаха горизонтального оперения. Закрылки или щитки установлены на омываемом водой участке крыла подвижно-поворотно в отклоненном на рабочий угол положении. Щитки имеют возможность прижатия к крылу, а закрылки - до положения исходного профиля крыла под действием водяных струй. Они имеют возможность восстановления их начального положения при отсутствии водяных струй. Технический результат реализации изобретения заключается в устранении неблагоприятных пикирующих моментов от взлетно-посадочной механизации и в улучшении взлетно-посадочных характеристик СА. 6 ил.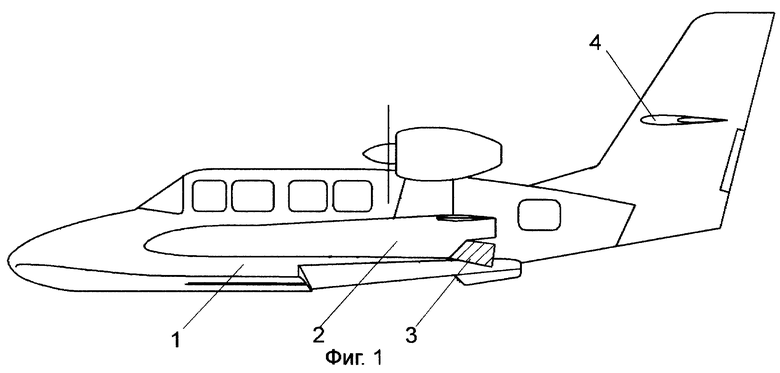
Самолет-амфибия, содержащий лодку, хвостовое оперение, низкорасположенное глиссирующее крыло с положительным углом поперечного V и механизацией в виде щитков и закрылков, отличающийся тем, что щитки или закрылки установлены на омываемом водой участке крыла подвижно-поворотно в отклоненном на рабочий угол положении, с возможностью прижатия щитков к крылу, а закрылков - до положения исходного профиля крыла под действием водяных струй и восстановления их начального положения при отсутствии водяных струй, при этом размах щитков или закрылков не превышает размаха горизонтального оперения.
| US 4962978 A, 16.10.1990 | |||
| Боеприпас усиленного осколочно-фугасного или фугасного действия | 2019 |
|
RU2720141C1 |
| DE 3729988 A1, 16.03.1989. | |||
