Предлагаемое изобретение относится к системам управления самолетов-амфибий, а именно к устройствам управления углом тангажа самолета-амфибии при движении по воде в режиме глиссирования.
Известны системы автоматического управления (САУ) самолетов, которые содержат контур стабилизации угла тангажа (1). Этот контур предназначен для управления траекторией полета самолета. Посредством отклонений руля высоты (РВ) он обеспечивает выдерживание угла тангажа, заданного летчиком или вырабатываемого вычислителем системы траекторного управления. Этот контур предназначен для управления движением самолета в воздухе, заданное значение угла тангажа определяется задачами траекторного управления (главная задача предлагаемой системы управления углом тангажа - повышение безопасности при движении гидросамолета по водной поверхности), предлагаемая система отличается по принципу формирования заданных значений углов тангажа (заданные углы тангажа предполагается определять по принципу удаленности от границ устойчивого глиссирования, а также с учетом возможностей оптимизации длины разбега при взлете с воды).
Известны ограничители предельных режимов (ОПР) (2). В частности, автомат ограничения углов атаки (α) при приближении самолета к αкритич включается в управление и отклоняет РВ «на пикирование», чтобы предотвратить сваливание самолета в штопор. Автомат ограничения углов атаки также используется только в полете (в воздухе); автомат ОПР не решает задачу выдерживания определенного заданного значения угла тангажа, а лишь обеспечивает «непревышение» самолетом заданного предельного значения угла атаки.
Известно также устройство для борьбы с продольными колебаниями самолета-амфибии при движении в контакте с водной поверхностью - демпфер тангажа с оптимизированным для гашения гидродинамических моментов законом управления (3). Такой демпфер включен в систему управления аэродинамического РВ самолета-амфибии Бе-200 и работает в режиме минимизации угловой скорости тангажа (ωz) при движении самолета по волне в режиме глиссирования. При этом за счет уменьшения раскачки самолета-амфибии повышается мореходность (допускается эксплуатация самолета-амфибии при большей высоте волн).
Недостатки этого устройства:
- демпфер тангажа не управляет значением угла тангажа, а только демпфирует раскачку; при этом, если по какой-либо причине угол тангажа выйдет за границы гидродинамической устойчивости (фиг.1, 2), демпфирующая мощность аэродинамического РВ становится несоизмеримо малой в сравнении с гидродинамическими моментами и демпфер становится неэффективным (см. фиг.3, вариант 2);
- при определенных сочетаниях формы водной поверхности демпфер тангажа, который стабилизирует угол тангажа, достигнутый при ωz=0, может затруднить уход самолета со случайно достигнутого околокритического (близкого к границе устойчивости) угла тангажа, т.е. "подготовить" пересечение границы неустойчивости при дальнейшей встрече с неблагоприятной волной.
Как средство автоматического управления самолетом-амфибией при движении по водной поверхности демпфер тангажа самолета-амфибии Бе-200 взят в качестве прототипа предлагаемого изобретения.
При глиссировании самолета-амфибии по водной поверхности существуют граничные значения углов тангажа, выход за которые вызывает потерю продольной либо путевой устойчивости (верхняя и нижняя границы гидродинамической устойчивости). При нормальной эксплуатации «невыход» за эти границы обеспечивается соблюдением рекомендаций Руководства по летной эксплуатации (РЛЭ), например, при установке стабилизатора перед взлетом с воды в положение, соответствующее центровке самолета и взлетному положению механизации крыла, самолет-амфибия глиссирует на оптимальных, с точки зрения удаленности от границ устойчивости, углах тангажа без вмешательства летчика в управление (см. фиг.1) Однако возможны ситуации, связанные с отказами или с «человеческим фактором», когда самолет-амфибия может выйти на углы тангажа, близкие к граничным, например;
- отказ довыпуска механизации на взлете (стабилизатор перед взлетом установлен согласно РЛЭ в расчете на то, что в процессе разбега произойдет довыпуск закрылков из стартового положения 10° во взлетное положение 38°, однако закрылки остались в положении 10°); в этом случае при отсутствии своевременной реакции летчика угол тангажа может опасно приблизиться к верхней границе устойчивости (см фиг.1);
- запаздывание реакции летчика на опускание носа самолета-амфибии после перевода двигателей на взлетный режим при заборе воды с глиссирования; в этом случае вероятен выход на нижнюю границу устойчивости (см. фиг.2).
- при глиссировании на большой волне возможен непроизвольный выход за границы устойчивости (например, при попытках малоопытного летчика компенсировать раскачку самолета-амфибии).
Задачей предлагаемого изобретения является улучшение характеристик безопасности и мореходности самолетов-амфибий.
Поставленная задача достигается тем, что в систему управления углом тангажа самолета-амфибии при движении по воде в режиме глиссирования, содержащую датчик касания воды, блок датчиков параметров движения самолета-амфибии и вычислитель для формирования сигнала автоматического отклонения руля высоты, включен задатчик оптимальных углов тангажа, в блок датчиков параметров движения самолета-амфибии включены датчик скорости относительно воды и датчик текущего угла тангажа, а в состав вычислителя включены блок стабилизации заданного угла тангажа, использующий сигналы от датчика скорости относительно воды, поступающие через задатчик оптимальных углов тангажа, и датчика текущего угла тангажа, и связанный с ним блок плавного подключения к исполнительной части системы управления руля высоты, использующий показания датчика касания воды.
В отличие от прототипа система автоматического управления углом тангажа при движении по воде самолета-амфибии в режиме глиссирования предназначена, прежде всего, для автоматического удержания самолета-амфибии в границах гидродинамической устойчивости. Граничные значениия углов тангажа на глиссировании являются, в определенном смысле, аналогами критических углов атаки в полете, т.е. это устройство является аналогом известных ОПР. Включенный в вычислитель этой системы блок стабилизации заданных углов тангажа обеспечивает не только демпфирование продольных колебаний, но и «уводит» самолет-амфибию с опасных углов, поэтому выход за границы устойчивости может быть отодвинут на более высокий уровень волнения моря. Поскольку предел уровня морского волнения для данного типа самолета-амфибии обычно означает раскачку по углу тангажа, которая вышла за границы устойчивости, система автоматического управления углом тангажа обеспечивает не только повышение безопасности, но и повышение уровня мореходности самолета-амфибии. При этом заданный (оптимальный) угол тангажа можно определять либо как постоянное для данного типа самолета-амфибии, оптимальное с точки зрения удаленности от границ гидродинамической устойчивости значение либо формировать переменное значение в зависимости от скорости и других параметров. Если, например, формировать заданные углы тангажа в задатчике с учетом возможностей минимизации длины разбега, автоматическое управление углом тангажа улучшает и эту эксплуатационную характеристику самолета-амфибии.
Сущность предлагаемого изобретения поясняется чертежами, где:
на фиг.1 показана зависимость угла тангажа самолета-амфибии от скорости при взлете с воды в штилевых условиях;
на фиг.2 показана зависимость угла тангажа самолета-амфибии от скорости при заборе воды с глиссирования;
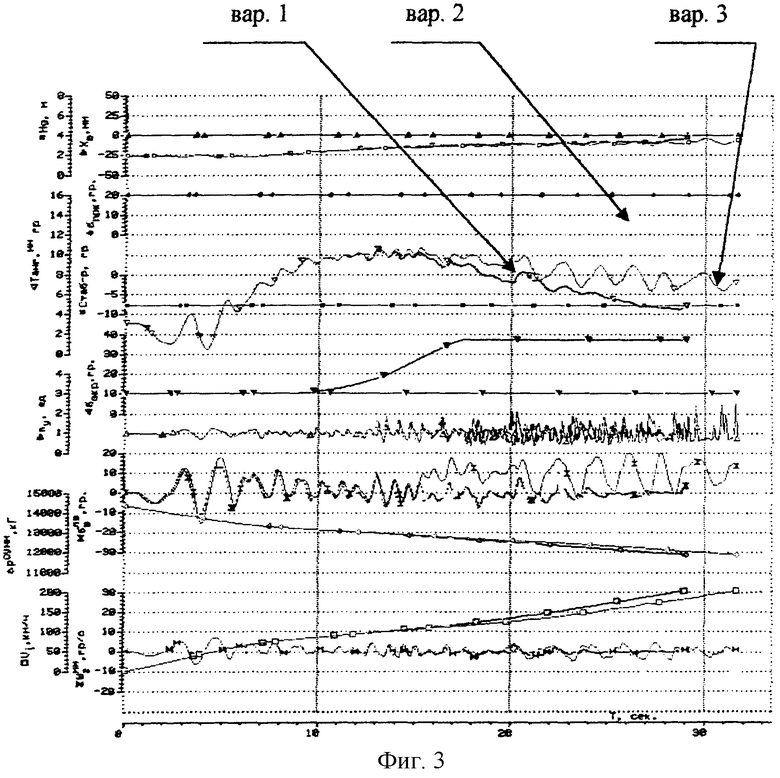
на фиг.3 показана реализуемость и эффективность предлагаемой системы путем математического моделирования для случая отказа довыпуска закрылков при взлете самолета-амфибии с воды:
- вар. 1 - нормальный взлет;
- вар. 2 - взлет с отказом довыпуска закрылков на разбеге (без системы автоматического управления углом тангажа.
- вар. 3 - взлет с отказом довыпуска закрылков на разбеге с системой автоматического управления углом тангажа;
на фиг.4 показана схема предлагаемого изобретения.
Система автоматического управления углом тангажа самолета-амфибии при движении по воде в режиме глиссирования содержит блок датчиков параметров движения самолета-амфибии 1, в который включены датчик текущего угла тангажа 2, датчик скорости относительно воды 3 и датчик ωz 4, задатчик оптимальных углов тангажа 5, датчик касания воды 6, вычислитель 7 с блоком стабилизации заданного угла тангажа 8 и блоком плавного подключения 9.
Система включается в управление на фазах глиссирования самолета-амфибии по водной поверхности, определяемых блоком плавного подключения 9 по сигналу датчика касания воды 6 с учетом скорости, измеренной датчиком скорости относительно воды 3. При этом в задатчике оптимальных углов тангажа 5 с учетом скорости, измеренной датчиком скорости относительно воды 3, определяется оптимальное (по условиям гидродинамической устойчивости, а также с учетом возможностей минимизации длины разбега) значение угла тангажа. Вычислитель 7 с учетом текущих параметров движения самолета-амфибии, измеренных блоком датчиков параметров движения самолета-амфибии 1, выдает сигнал на отклонение РВ, приводящее как к демпфированию продольных колебаний самолета-амфибии, так и к устранению рассогласования между задающим в задатчике 5 оптимальным углом тангажа и измеренным датчиком 2 текущим углом тангажа, что снижает вероятность выхода угла тангажа за границы устойчивого глиссирования и улучшает характеристики безопасности и мореходности самолета-амфибии. При этом блок стабилизации заданного угла тангажа 8 помимо сигналов от задатчика 5 и датчика текущих углов тангажа 2 использует показания датчика ωz 4, а также показания блока датчиков параметров движения самолета-амфибии 1, необходимых для оптимального регулирования углов тангажа. Блок плавного подключения 9 обеспечивает плавное включение сигнала от блока стабилизации заданного угла тангажа 8 при касании самолетом-амфибией водной поверхности и «списывание» сигнала после отрыва.
Эффективность системы автоматического управления углом тангажа при движении по воде самолета-амфибии в режиме глиссирования в случае отказа довыпуска закрылков при взлете с воды исследована на математической модели самолета-амфибии, включающей модель гидродинамических реакций (4). При этом на скорости >115 км/ч задатчик оптимальных углов тангажа 5 выдает постоянное для всех скоростей значение (6 град.). Применяется простой закон управления - рассогласование преобразуется в отклонение руля через коэффициент усиления и сглаживания апериодическим звеном. Расход РВ на компенсацию рассогласования текущего и заданного углов тангажа ограничен + - 10 град.
На фиг.3 показан пример результатов моделирования разбега самолета-амфибии при волне Н3%≈1 м в трех вариантах:
вар. 1 - при нормальном довыпуске закрылков,
вар. 2 - в случае отказа довыпуска без системы управления углом тангажа;
вар. 3 - с отказом довыпуска закрылков и при включенной системе управления углом тангажа.
В последнем варианте работа автомата не допустила выход самолета за границу гидродинамической устойчивости. Т.к. оптимизация закона управления (4) в этом пробном эксперименте практически отсутствовала, можно ожидать, что большая, в сравнении с вариантом 1, раскачка самолета-амфибии в варианте 3 также может быть устранена при выборе лучшего закона управления.
Таким образом, использование системы автоматического управления углом тангажа при движении по воде самолета-амфибии в режиме глиссирования:
- улучшает характеристики безопасности, снижая вероятность выхода углов тангажа самолета-амфибии за границы устойчивости, и тем самым смягчает последствия возможных отказов или ошибок летчика на режимах глиссирования, а также уменьшает нагрузку на летчика на сложных этапах движения по воде, например при заборе воды с глиссирования;
- повышает мореходность самолета-амфибии (предельный уровень морского волнения);
- позволяет без участия летчика оптимизировать углы тангажа самолета-амфибии для уменьшения длины разбега (для тех типов самолетов-амфибий, на которых летчику рекомендуется отклонять РВ на разбеге в зависимости от достигнутой скорости).
Источники информации
1. Автоматизированное управление самолетами и вертолетами. Под ред. С.М.Федорова. М., «Транспорт», 1977 - стр. 84.
2. Бородин В.Т., Рыльский Г.И. Пилотажные комплексы и системы управления самолетов и вертолетов. М., «Машиностроение», 1978 - стр. 31.
3. Петров В.М. Перспективы развития СДУ самолетов-амфибий//Сб.докладов научной конференции по гидроавиации «Геленджик-96». - М.,1996 - стр. 198, 199, 201.
4. Математическое моделирование движения гидросамолета по водной поверхности//Сб.докладов научной конференции по гидроавиации «Геленджик-96». - М., 1996 - стр. 64.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании | 2018 |
|
RU2692740C1 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛЬНОЙ ИНДИКАЦИИ СКОРОСТИ ПРОТИВОПОЖАРНОГО САМОЛЁТА-АМФИБИИ ПРИ ЗАБОРЕ ВОДЫ НА ГЛИССИРОВАНИИ ПО ВОДНОЙ ПОВЕРХНОСТИ | 2013 |
|
RU2541613C2 |
| ДВУХМОТОРНЫЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ НАЗЕМНОГО И ВОДНОГО БАЗИРОВАНИЯ С УКОРОЧЕННЫМ И ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ "ЛАДОГА-9 УВ" | 2001 |
|
RU2196707C2 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВЫХОДА УГЛА ТАНГАЖА САМОЛЕТА ЗА ПРЕДЕЛЫ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА | 2011 |
|
RU2490168C1 |
| ГИДРОСАМОЛЕТ | 2001 |
|
RU2223200C2 |
| СПОСОБ СИГНАЛИЗАЦИИ ПРИВОДНЕНИЯ И ВЗЛЕТА С ВОДНОЙ ПОВЕРХНОСТИ САМОЛЕТА-АМФИБИИ | 2011 |
|
RU2492121C2 |
| ДАЛЬНИЙ ПОИСКОВО-СПАСАТЕЛЬНЫЙ ПОПЛАВКОВЫЙ ГИДРОСАМОЛЕТ-АМФИБИЯ ТРИМАРАННОЙ СХЕМЫ КОМПОНОВКИ "ФРЕГАТ" | 2006 |
|
RU2324627C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| САМОЛЕТ-АМФИБИЯ | 2011 |
|
RU2471677C1 |
| Стартово-подъёмное устройство для скоростных амфибий | 2021 |
|
RU2752041C1 |


Изобретение относится к авиации, в частности к системам управления самолетов-амфибий. Система содержит датчик касания воды, блок датчиков параметров движения самолета-амфибии и вычислитель для формирования сигнала автоматического отклонения руля высоты. В систему управления включен задатчик оптимальных углов тангажа, в блок датчиков параметров движения самолета-амфибии включены датчик скорости относительно воды и датчик текущего угла тангажа. В состав вычислителя включены блок стабилизации заданного угла тангажа и блок плавного подключения. Техническим результатом изобретения является улучшение характеристик безопасности и повышение мореходности. 4 ил.
Система управления углом тангажа самолета-амфибии при движении по воде в режиме глиссирования, содержащая датчик касания воды, блок датчиков параметров движения самолета-амфибии и вычислитель для формирования сигнала автоматического отклонения руля высоты, отличающаяся тем, что в систему автоматического управления углом тангажа самолета-амфибии включен задатчик оптимальных углов тангажа, в блок датчиков параметров движения самолета-амфибии включены датчик скорости относительно воды и датчик текущего угла тангажа, а в состав вычислителя включены блок стабилизации заданного угла тангажа, использующий сигналы от датчика скорости относительно воды, поступающие через задатчик оптимальных углов тангажа, и датчика текущего угла тангажа, и связанный с ним блок плавного подключения к исполнительной части системы управления руля высоты, использующий показания датчика касания воды.
| RU 2002675 C1, 15.11.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЛАСТИ ВОЗМОЖНЫХ КУРСОВ ПРИВОДНЕНИЯ САМОЛЕТА-АМФИБИИ И УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ПОЛОЖЕНИЕМ САМОЛЕТА-АМФИБИИ | 1993 |
|
RU2070142C1 |
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОЙ СХЕМЫ И НАЗЕМНО-ВОЗДУШНАЯ АМФИБИЯ (НВА) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2127202C1 |
| Боеприпас усиленного осколочно-фугасного или фугасного действия | 2019 |
|
RU2720141C1 |

