Изобретение относится к метеорологии, а именно к способам определения параметров пограничного слоя атмосферы, и может быть использовано в интересах службы безопасности взлета и посадки самолетов.
Известен способ радиоакустического зондирования (РАЗ) атмосферы, включающий излучение под некоторым углом к вертикали из одной точки на поверхности земли пакета акустических волн, облучение его из той же точки радиоимпульсами с длиной волны, вдвое большей чем акустическая, прием в той же точке электромагнитных эхо-сигналов и измерение их параметров, по величине которых определяют параметры атмосферы (скорость ветра и температуру воздуха). [1. Каллистратова М.А., Кон А.И. Радиоакустическое зондирование атмосферы. М.: Наука. 1985, 197 с.], рис. 1.8, с.16-18.
В известном способе, реализованном с помощью моностатического расдара ЕМАК, дальность зондирования зависит, во-первых, от величины горизонтального ветра, во-вторых, от мешающего воздействия посторонних электромагнитных сигналов (например, аэродромных радиотехнических средств), в связи с тем, что происходит ветровой вынос звукового пакета из диаграммы направленности радиоантенны и ухудшение соотношения сигнал/шум под воздействием электромагнитных помех. К тому же этот способ сам создает помехи, так как в нем используются короткие прямоугольные радиоимпульсы, обладающие широкой частотной полосой. Таким образом, данный способ не обеспечивает устойчивой дальности зондирования в реальных условиях аэропорта и не удовлетворяет требованиям по электромагнитной совместимости.
Наиболее близким к заявляемому по совокупности признаков является способ радиоакустического наклонного зондирования атмосферы [2. Фабрикант А.Л. А.с. СССР 1290881, МПК G 01 S 13/95 от 24.05.85. 3. Фабрикант А.Л. // Изв.ВУЗов. Радиофизика, 1988, т. 31, no 10, 1160-1163], включающий излучение из одной точки пакета акустических волн, облучение его из той же точки радиоимпульсами с длиной волны, вдвое большей чем акустическая, поиск значений угла места и азимута, при которых эхо-сигналы с максимальной интенсивностью принимают в точке излучения, определяют доплеровский сдвиг частоты эхо-сигнала и по нему находят температуру и компоненты вектора скорости ветра.
Основным фактором, ограничивающим применение способа-прототипа в аэропорту, является невозможность измерения значений скорости ветра на конкретных высотах. В данном способе определяются средние значения скорости ветра (усредненные по толщине атмосферы от поверхности Земли до некоторой высоты). Как показано в [1, с. 164-165], различие между локальным и средним ветром возрастает с ростом высоты зондирования.
Известны способы РАЗ, в которых возможно измерение значений скорости ветра и температуры на конкретных высотах. К таким способам относятся как бистатические, так и моностатические способы РАЗ, но они не дают положительного результата в аэропорту, так как не обеспечивают устойчивой дальности температурно-ветрового зондирования из-за влияния горизонтального ветра. Согласно требованиям ICAO для обеспечения безаварийных взлета и посадки самолетов значения горизонтального ветра должны регистрироваться на конкретных высотах (2, 30, 60, 90,...м). [4. Специализированное совещание по всепогодным полетам. DOC9242, AWO/78.- Монреаль: Изд. ИКАО, 1978, 180 с.]
В основу изобретения поставлена задача создания способа радиоакустического зондирования атмосферы, в котором обеспечивается постоянная дальность температурно-ветрового зондирования, не зависящая от состояния атмосферы, и измерение метеовеличин на конкретных высотных уровнях при излучении радиоимпульсов, форма и длительность которых обеспечивает перекрытие максимальной наклонной дальности и компенсацию ослабления отраженных сигналов с ростом текущей дальности, и зондировании по и против ветра под углом места, вычисляемым из нового математического выражения и обеспечивающим совмещение точки излучения акустических и электромагнитных волн и приема эхо-сигналов, текущая дальность определяется из результатов наклонного зондирования, что исключает необходимость использования коротких фронтов радиоимпульса, разрешающая способность определяется параметрами звукового пакета, причем исключается ее зависимость от формы и длительности радиоимпульса, а следовательно, исключается зависимость характеристик способа от полосы необходимых радиочастот, что позволяет способу работать при повышенных требованиях к электромагнитной совместимости.
Такой технический результат достигается тем, что в способе радиоакустического наклонного зондирования атмосферы, заключающемся в том, что из точки на поверхности земли излучают акустические посылки и облучают их радиоимпульсами с длиной волны, вдвое большей чем акустическая, с разных направлений принимают электромагнитные эхо-сигналы и измеряют их параметры, по которым определяют характеристики атмосферы, согласно изобретению наклонное зондирование производят вдоль осей, имеющих постоянный угол места, в полном азимутальном угле с шагом, равным угловому разрешению по азимуту, причем ширину диаграммы акустического излучения устанавливают равной угловому разрешению по азимуту, а по углу места равной интервалу углов места Θ0 = π/2-α0, где α0 находят из решения уравнения ,
,
для профиля ветра в пограничном слое при различной стратификации атмосферы, излучают акустические посылки с периодом следования Ts ≥ R/cs+τs и длительностью τs = Δr/cs, где cs - приземная скорость звука в воздухе, R = H/sinΘ - наклонная дальность зондирования, H - высота зондирования, Δr - разрешение по наклонной дальности, которое выбирают с учетом оценки Δr ≥ 2λs, где λs - длина звуковой волны в атмосфере,
акустическую посылку составляют из К временных дискретов, где К выбирают из условия перекрытия интервала температур на дистанции зондирования, в k-ом дискрете (k= l, 2. . .К) частоту устанавливают равной Fsk = Fsmin+kΔFs, где Fsmin, ΔFs задают в зависимости от состояния атмосферы, причем звуковую частоту среднего дискрета устанавливают по приземной температуре,
излучают радиоимпульсы с периодом следования Te < 1/(2Fs) и длительностью τe = 2R/ce, где Сe - скорость света, причем τe = 2τф, τф - время нарастания и спада радиоимпульса,
определяют разность доплеровских сдвигов эхо-сигналов в каждой азимутальной плоскости и выбирают ту азимутальную плоскость, для которой разность доплеровских сдвигов достигает максимального значения (Δ Ωдmax), вычисляют скорость локального горизонтального ветра по формуле Vг = λe Δ Ωдmax/(8πsinα) , где λe - длина радиоволны,
определяют расстояние до зондируемого объема по длительности принимаемого эхо-сигнала и по скорости звука с учетом времени распространения.
Основой предлагаемого способа радиоакустического наклонного зондирования является физический эффект, связанный с ветровой деформацией акустического волнового фронта при его распространении в атмосфере. В результате ветрового воздействия сферический волновой фронт принимает форму сплющенной и вытянутой по направлению ветра эллипсоидной поверхности. На этой поверхности акустического волнового фронта имеются две области, обладающие свойством отражать и фокусировать отраженные радиоволны в точку излучения звуковых и ЭМ колебаний. Обе области пересекаются азимутальной плоскостью, в которой лежит локальный горизонтальный вектор ветра. При излучении и приеме радиоимпульсов из одной и той же точки в плоскости локального горизонтального ветра, т.е. по ветру и против ветра, доплеровский сдвиг отраженных радиосигналов оказывается предельно возможным (Ωдmax и Ωдmin) по сравнению с зондированием в других азимутальных плоскостях. В предложенном способе при круговом зондировании выбирают значение азимута, для которого разность доплеровских сдвигов достигает максимума (ΔΩдmax = Ωдmax-Ωдmin) и вычисляют локальный горизонтальный ветер по формуле Vг = λeΔΩдmax/(8πsinα).
В прототипе регистрируют эхо-сигнал с максимальной интенсивностью, по которому находят азимуты и углы места двух точек отражения, в каждой из которых ветер имеет две горизонтальные компоненты. По результатам измерения доплеровского сдвига радиоволн, отраженных от найденных точек, оказывается возможным определить только средние горизонтальные компоненты ветра, т.е. усредненные по толщине атмосферы от поверхности Земли до точек отражения.
Иными словами, в прототипе точку отражения находят как средний квадратический центр области отражения, характеризующий весовое распределение мощности отражения, в то время как в предложенном способе точка отражения является средним арифметическим центром области отражения, который определяется принципом наименьшего пути радиолуча через акустический пакет, непосредственно связанным с дифракцией Брэгга [1, с. 10-11]. При искажении фазового фронта горизонтальным ветром координаты среднеквадратического и среднеарифметического центров могут заметно отличаться. Таким образом, в предложении определяют именно локальный горизонтальный ветер.
Для определения угла места, под которым наиболее вероятно увидеть из точки зондирования точку максимального отражения на поверхности области отражения, проведено численное моделирование с учетом высотного распределения ветра в реальной атмосфере, основные соотношения приведены ниже.
Определение углов места зондирования в предложенном способе.
Действие ветрового потока с вектором скорости  приводит к деформации сферического фронта R0 2=cзв 2t2 звуковой волны, распространяющейся в атмосфере. Здесь
приводит к деформации сферического фронта R0 2=cзв 2t2 звуковой волны, распространяющейся в атмосфере. Здесь  - радиус-вектор поверхности, образованной фронтом звуковой волны. Деформация сферического фронта под действием ветра определяется результирующим вектором
- радиус-вектор поверхности, образованной фронтом звуковой волны. Деформация сферического фронта под действием ветра определяется результирующим вектором  его распространения. В результате поверхность деформированного фронта звуковой волны имеет вид
его распространения. В результате поверхность деформированного фронта звуковой волны имеет вид
R2(cзв+ur)2t2, (1)
где ur - радиальный компонент вектора скорости ветра,  - радиус-вектор.
- радиус-вектор.
Выражение (1) в декартовой системе координат представляет следующее параметрическое уравнение поверхности: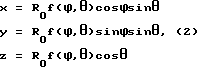
где 
В уравнении (2) применены следующие обозначения: сx, cy, cz и ux, uy, uz - компоненты векторов скорости звука и ветра в декартовой системе координат, ϕ и θ - полярные координаты (0≤ϕ≤2π, 0≤θ≤π/2), угол θ отсчитывается от нормали к поверхности Земли.
Из учета требования совпадения точек приема и излучения электромагнитных колебаний в комбинированной антенне РАЗ нормаль к поверхности фазового фронта звуковой волны в точке M0(x0,y0,z0) проходит через начало координат O(0,0,0). Это условие дает следующую систему уравнений относительно неизвестных величин R0, ϕ0,θ0, определяющих ориентацию антенны: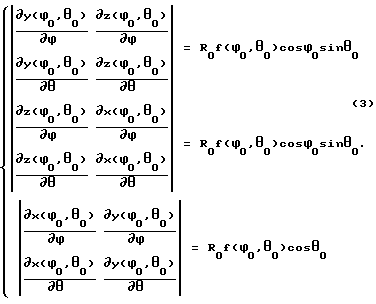
Уравнение (3) определяет условие получения эхо-сигнала в точке излучения звуковых и электромагнитных колебаний. Решение этого уравнения дает значения следующих основных параметров зондирования:
- азимута главной оси диаграммы направленности антенны РАЗ (ϕ0) ;
- угла места той же оси  ;
;
- наклонной дальности R0f(ϕ0,θ0)) .
Сечение фазового фронта звуковой волны в плоскости xz (ϕ = 0) можно описать следующим параметрическим уравнением кривой:
где 
В уравнении (4) величина δ0 представляет угол ориентации вектора скорости ветра относительно оси z.
Возможность совмещения точек излучения и приема электромагнитного сигнала, отраженного окрестностью фазового фронта звуковой волны с центром в точке M0(z0,x0), реализуется при выполнении условия
Решение дифференциально-трансцендентного уравнения (5) при фиксированном значении R0 позволяет определить угол места  точки М0 на фазовом фронте, а также значение наклонной дальности
точки М0 на фазовом фронте, а также значение наклонной дальности
Идеализированный случай, когда скорость ветра равномерно растет с высотой, т. е.  , достоин внимания по причине того, что на практике реальный профиль ветра всегда можно апроксимировать кусочно-линейными функциями с различными значениями k.
, достоин внимания по причине того, что на практике реальный профиль ветра всегда можно апроксимировать кусочно-линейными функциями с различными значениями k.
Для случая горизонтального ветра  уравнение (5) преобразуется к виду
уравнение (5) преобразуется к виду
ctg2θ = kt/2. (7)
Из анализа решения данного уравнения следует, что угол места  "рабочей" точки фазового фронта звуковой волны в определенной мере зависит от величины kt. Это свидетельствует о том, что деформация фазового фронта звуковой волны увеличивается с высотой, так как z ≈ ct и u(z) = kt.
"рабочей" точки фазового фронта звуковой волны в определенной мере зависит от величины kt. Это свидетельствует о том, что деформация фазового фронта звуковой волны увеличивается с высотой, так как z ≈ ct и u(z) = kt.
В реальной атмосфере типовые профили ветра в пограничном слое атмосферы [5. Атмосфера. Справочник. Л.: Гидрометеоиздат, 1991, 509 с. Раздел 9.1. 6. Пановский Г. Н. Планетарный пограничный слой. /Динамика погоды. 1988, с. 351-382] апроксимируется аналитической функцией
где vg - геострофический ветер; χ0 - параметр шероховатости поверхности; а и b - некоторые постоянные. Атмосферным пограничным слоем (планетарным пограничным слоем) называют прилегающий к поверхности Земли слой воздуха, в котором существенно сказывается динамическое и тепловое влияние подстилающей поверхности. Толщина его зависит от метеорологических условий и колеблется от нескольких сотен метров (в ночные часы при слабом ветре) до 2-3 км (в дневные часы при сильном ветре).
Получены решения уравнения (5) для реальных профилей горизонтальной скорости ветра над сушей вечером, ночью, днем, которые позволяют задать углы места точек максимального отражения Θ = (40°-45°)±15°. Этот результат хорошо согласуется с частными случаями, экспериментально проверенными в работах [7. Масуда E. Техника дистанционного исследования атмосферы с использованием звуковых волн //Кихон онке гакайси, 1987. Т.43, nо 6. С.425-430. Перевод Р-14158 от 1.8.88, ГПНТБ, Москва. 8. Takahashi К., Masuda Y., Matuura N., etc. Analysis of acoustic wave fronts in the atmosphere to profile the temperature and wind with a radio acoustic sounding system.// J. Acoust Soc. Am. Vol. 84 (3), Sept. 1988, 1061-1066] и подтвержденными в статье - прототипе [3].
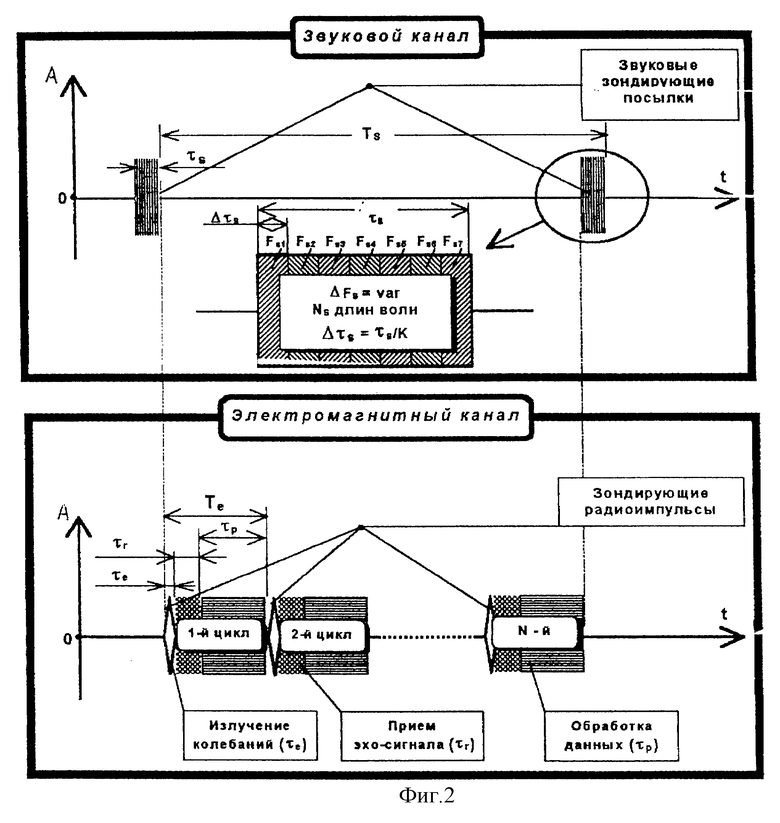
На фиг. 1 представлена структурная схема устройства для реализации предложенного способа с указанием направления зондирующих лучей. Зенитные углы обозначены α. На фиг. 2 приведены временные диаграммы работы при наклонном зондировании под углами места Θ = 90°-α. На фиг.3 представлены эхограммы излучения и приема.
Устройство для реализации предложенного способа, согласно фиг. 1, включает антенное устройство 1 расдара, выполненное в виде двух акустоэлектромагнитных антенн ЕМАК (рис. 1.8 [1]). В антенне ЕМАК параболическое зеркало облучается независимо звуковыми и радиоволнами, причем оптические оси акустического и радиоизлучения совпадают. В устройстве для реализации предложенного способа такие две параболические антенны размещаются на одном механизме пространственной ориентации диаметрально противоположно по азимуту под одинаковым углом места с возможностью механического сканирования вокруг вертикальной оси. Каждая антенна в антенном устройстве 1 имеет ширину диаграммы направленности для акустических волн по углу места Δθ = ±15° и по азимуту Δϕ±8°.
Указанные значения угловых размеров главного лепестка акустической диаграммы направленности определяются из следующих соображений. По углу места антенна должна "видеть" угловой сектор, вычисленный в данной заявке, при котором реализуется наклонное радиоакустическое зондирование, по азимуту ширина диаграммы направленности должна обеспечивать угловое разрешение при измерении направления скорости ветра, требуемое в авиационных стандартах [9. Требования к метеооборудованию, предназначенному для получения метеоинформации, необходимой при обеспечении взлета и посадки воздушных судов на аэродромах ГА. //Труды ГГО. Л.: Гидрометеоиздат, 1989. Т.523. С.2-25].
Для обеспечения зондирования внутри угла места Δθ = ±15° и азимутального угла Δϕ±8° размеры раскрыва зеркал радиоакустического антенного устройства рассчитываются из условия получения именно такой ширины главного лепестка диаграммы излучения для акустических волн. Методику расчета можно взять, например, из [10. Марков Г.Т., Сазонов Д.М. Антенны.- М.: Энергия, 1975, 528 с. ] Учитывая соотношение длин волн по правилу Брэгга, получим диаграмму направленности антенны для радиоволн шире, чем для акустических. Поэтому, хотя под действием горизонтального ветра возмущенный акустической посылкой объем может отклониться от оси главного лепестка электромагнитной диаграммы направленности, но останется в пределах этого лепестка, а не "выдувается". Таким образом возмущенный объем остается в поле зрения радиоантенны, что гарантирует достижение заданной высоты зондирования.
Антенное устройство 1 через антенный коммутатор 2 соединено с радиоприемником 3, формирователем звуковых посылок 4 и радиопередатчиком 5. Механизм пространственной ориентации антенного устройства 1 соединен с блоком ориентации 6, который связан с управляющей ЭВМ 7. ЭВМ 7 соединена с радиоприемником 3, синхронизатором 8, регистратором 9. Синхронизатор 8 соединен с антенным коммутатором 2, радиоприемником 3, формирователем звуковых посылок 4, радиопередатчиком 5.
Описанная схема расдара отличается по составу от известной схемы моностатического расдара ЕМАК [1, рис. 1.8] тем, что в предложении антенное устройство 1 содержит две антенны, которые вместе могут поворачиваться на 180o по азимуту и на ±5o по углу места, в схеме ЕМАК - одна антенна, направляемая под разными углами.
Фиг. 1 не изменится, если антенное устройство 1 будет выполнено в виде кольцевой решетки, состоящей из комбинированных антенн ЕМАК. В этом варианте антенная система остается неподвижной, изменяется алгоритм управления процессом радиоакустического зондирования, о чем будет сказано ниже.
Способ реализуется следующим образом. При наличии двух антенн в антенном устройстве 1 на каждую антенну подают из формирователя звуковых посылок 4 через антенный коммутатор 2 одновременно акустический импульс, а затем в соответствии с временной диаграммой фиг. 2 - электромагнитные импульсы из радиопередатчика 5. Прошедшие на антенну эхо-сигналы поступают через антенный коммутатор в радиоприемник 3, где происходит преобразование радиоимпульса в видеоимпульс, который поступает на вход ЭВМ 7 (персональный компьютер). В ЭВМ сигнал оцифровывается, обрабатывается в соответствии с заложенным матобеспечением и подается на регистратор 9. После подачи N радиоимпульсов регистратор выдает на ЭВМ сигнал о готовности к следующему циклу зондирования. По сигналу готовности ЭВМ выдает сигнал на синхронизатор 8 и блок ориентации 6, который, в свою очередь, включает механизм ориентации, который изменяет положение антенного устройства на один угловой шаг по азимуту, равный азимутальной ширине акустической диаграммы направленности. Синхронизатор 8 выдает сигналы готовности к следующему циклу посылки акустического импульса на блоки 2, 3, 4, 5. Период акустической посылки повторяется. Полуоборот антенной системы по азимуту позволяет провести зондирование во всем пространстве над землей.
При наличии антенной кольцевой решетки можно посылать каждый следующий акустический импульс в каждую следующую пару диаметрально противоположных антенн. В отличие от приведенного выше описания, после окончания очередного периода акустической посылки блок ориентации подает сигнал на устройство электрического переключения очередной пары антенн.
Еще один вариант зондирования при наличии кольцевой антенной решетки - одновременное излучение акустических импульсов, а затем одновременное излучение радиоимпульсов из всех парциальных антенн. В этом варианте к каждой антенне должен быть подсоединен свой радиоприемник. Прием эхо-сигналов осуществляется одновременно и независимо каждой парциальной антенной и подсоединенным к ней парциальным радиоприемником.
Последовательность излучения акустических и радиоимпульсов и приема эхо-сигналов в одной антенне устройства 1 показана на фиг.2. Для акустических посылок находят период следования Ts≥R/cs+τs и длительность τs= Δr/cs, где сs - приземная скорость звука в воздухе, R = H/sinθ - наклонная дальность зондирования, H - высота зондирования, Δr - разрешение по наклонной дальности, выбираемое с учетом оценки Δr≥2λs, где λs - длина звуковой волны в приземном слое. Акустическую посылку составляют из К временных дискретов, где К выбирают из условия перекрытия интервала температур на дистанции зондирования, в k-ом дискрете (k=1,2...К) частоту устанавливают равной Fsk= Fsmin+kΔFs, где Fsmin ΔFs задают в зависимости от состояния атмосферы, причем звуковую частоту среднего дискрета устанавливают по приземной температуре, излучают радиоимпульсы с периодом следования Te < 1/(2Fs) и длительностью τe= 2R/ce, где ce - скорость света, причем τe= 2τф,τф - время нарастания и спада радиоимпульса.
Приведем расчет временной зависимости амплитуды сигналов А (фиг. 2) для следующих исходных данных. Высота зондирования H=500 м равна высоте круга, который делает самолет перед заходом на посадку, несущая частота ЭМ импульсов fe= 1228 МГц (длина радиоволн λe =0,244 м) выбрана в середине интервала частот 1215 и 1240 МГц, свободного на типовом аэродроме. Частота 1215 МГц является верхней границей работы аппаратуры ближней навигации; 1240 МГц - нижняя граница рабочих частот трассовых радиолокаторов [11. Давыдов П. С. , Сосновский А.А., Хаймович И.А. Авиационная радиолокация. Справочник. - М. : Транспорт, 1984, 223 с. 12. Авиационная радионавигация. Справочник. Под ред. А. А. Сосновского. - М.: Транспорт, 1990, 264 с. 13. Авиационная радиосвязь. Справочник. Под редакцией П.В. Олянюка. - М.: Транспорт, 1990, 208 с. ] . Согласно экспериментальным данным [1, рис. 6.1] для волны λe =0,244 м достигнутая высота радиоакустического зондирования не превышает 0,6 км.
Разрешение по высоте выбрано ΔH =30 м, что соответствует требованиям ICAO к измерению сдвига ветра в слоях толщиной 30 м для высот 2, 30, 60 м. Длина акустической волны выбирается из условия Брэгга[1] λs= λe/2 =0,122 м. Интервал температур воздуха зададим равным ±40oC(Т=233 - 313 К). Из уравнения Лапласа находим интервал скоростей звука. cs=20,053•T1/2=(306,09 - 354,7) м/с, и соответствующий интервал звуковых частот Fs= cs/λs =(2507 - 2907) Гц.
При угле азимута θ = 40° радиоакустического зондирования наклонная дальность R = H/sinΘ =778 м. Разрешение по наклонной дальности Δr = ΔH/sinΘ =47 м. Длительность акустического зондирующего импульса τs= Δr/cs =140 мс определим округленно для середины диапазона звуковых скоростей (cs=335,7 м/с). Акустическая посылка содержит Ns=385 длин волн. Для обеспечения необходимого разрешения по дальности, согласно [1, ф-ла (4.26)], должно выполняться условие Ns<[(π/2)λsγT/T]-1/2= 391, где Т=293 К, γT =0,0098 К/м - сухоадиабатический градиент температуры.
В атмосферном приземном слое толщиной 500 м высотный ход температуры обычно не превышает ΔT =7 - 8 К. При Т=273±5 К приращение частоты звука на градус температуры составляет ΔFs/ΔT ≈ 5 Гц/К. Для перекрытия температур во всей толщине слоя акустическую посылку разделяют на К=7 временных дискретов, в которых несущая частота звуковой посылки нарастает с ростом порядкового номера относительно соседней на величину ΔFs =(2 - 10 Гц), причем оператор выставляет 2 Гц при малом высотном ходе температуры (в пасмурную погоду), 10 Гц - при ясной погоде. В среднем дискрете оператор выставляет частоту, соответствующую температуре (и скорости звука) на поверхности земли. Каждый временной дискрет акустического импульса содержит ns=Ns/K=55 длин волн.
За время между соседними акустическими посылками каждая из них должна пройти расстояние, не меньшее чем наклонная дальность зондирования. Период следования акустических пакетов (Ts-τs)≥R/cs. Для наименьшей звуковой частоты получаем Ts ≥2,68 с или Ts=2,7 с.
Длительность радиоимпульса в предложенном методе будем выбирать из условия перекрытия наклонной дальности передним фронтом. Для обеспечения минимальной полосы радиоканала при минимально возможной мощности импульса задний фронт должен быть равен переднему. Таким образом мы приходим к радиоимпульсу треугольной формы длительностью τe= 2R/ce =5,2 мкс.
Для определения необходимой ширины полосы радиотракта обычно определяют величину активной ширины спектра частот импульсного сигнала, в пределах которой содержится 95% всей его энергии. Согласно методике [14. Овчинников Н. И. Основы радиотехники. - М.: Воениздат, МО СССР, 1968, 408 с.], активная ширина спектра выражается формулой (2Δf)A≈ 2ν/τн, в которой коэффициент ν ≈ 0,56 для τф/τн= 0,5. Для пропускания последовательности треугольных радиоимпульсов длительностью 5,2 мкс на уровне активной ширины спектра необходимая полоса частот составит (2Δf)A≈ (2×0,56)τe≈ 0,22 МГц. Можно также оценивать необходимую ширину полосы по ширине главного и первых двух боковых максимумов с обеих сторон от несущей (2Δf)П. Значение (2Δf)П, соответствующее уровню мощности -27 дБ спектральной функции радиосигнала с треугольной огибающей, составляет (2Δf)П= (2×3)/τe≈ 1,2 МГц.
В радиоакустическом зондировании может использоваться как импульсное, так и непрерывное электромагнитное излучение. Самую узкую полосу имеет непрерывное излучение, оно используется в бистатическом способе РАЗ, поскольку в нем излучение и прием осуществляются принципиально из разных точек (и с помощью разных антенн). В предложенном моностатическом способе излучение и прием проводятся из одной точки (и желательно - с помощью одной и той же антенны). Применение протяженного радиоимпульса с нарастающим фронтом указанной выше длительности в предложенном способе позволяет решить сразу несколько задач: 1) обеспечить узкую рабочую полосу радиочастот, 2) развязать по времени режимы излучения и приема одной и той же антенны, 3) скомпенсировать уменьшение уровня мощности отраженного радиоимпульса при увеличении расстояния от антенны до возмущенного объема, 4) короткоимпульсные излучения посторонних станций могут быть легко отфильтрованы и не внесут искажений в работу предложенного способа.
Последние два пункта можно объяснить тем, что при длинном радиоимпульсе чем больше дальность, тем больше время взаимодействия электромагнитного и акустического излучения. Отсюда следует, во-первых, что на малых дальностях, где энергетика зондирующего радиоимпульса велика, время взаимодействия мало, а на больших дальностях время взаимодействия приблизительно равно длительности фронта электромагнитного импульса. Во-вторых, аэродромные РЛС работают с длительностями импульсов значительно короче, чем в предложенном способе, а потому время воздействия на РАЗ этих мешающих коротких импульсов существенно меньше, чем сигналов самой системы зондирования.
Период следования радиоимпульсов Тe находим из условия нормального фазового детектирования отраженных импульсных сигналов: дискретная функция (с доплеровской частотой, равной частоте звука) должна быть представлена более, чем двумя отсчетами за период следования. Поэтому 1/Te > 2Fs, принимаем 1/Тe= 10 кГц, т.е. Тe=100 мкс. Время между соседними радиоимпульсами Te-τe распределяется между временем приема отраженного радиоимпульса τr =5,2 мкс и временем на обработку данных τp =89,6 мкс. В течение времени между двумя соседними акустическими посылками можно излучить N = (Ts-τs)/Te =25600 радиоимпульсов.
Определение текущих значений наклонной дальности и высоты зондирования. В предложенном способе используются два альтернативных алгоритма, что позволяет повысить точность способа. Для пояснений мы будем пользоваться эхограммами излучения и приема (фиг. 3). Эхограммы излучения и приема - зависимости амплитуды сигналов от расстояния или времени показывают пространственное и временное расположение акустической посылки и одного излученного радиоимпульса. Дальность R0 соответствует моменту t0 отпирания приемника сразу после излучения радиоимпульса, < cs > - среднее значение скорости звука на дистанции от поверхности Земли до текущей высоты, Rmax - максимальная наклонная дальность зондирования.
Для определения наклонной дальности по длительности принимаемого эхо-сигнала используем соотношение Rs= tsce-Δr/2 , где ts - интервал времени от заднего фронта отражаемого радиоимпульса до спада принимаемого эхо-сигнала от звуковой посылки. Текущая высота зондирования под углом места Θ равна Hs= Rssinθ.
Для нахождения наклонной дальности по времени распространения звукового пакета используем выражение Rt= (Δt/-τs/2)<cs>, где Δt - измеряемый интервал времени от момента окончания излучения звуковой посылки до текущего момента времени.
Оценим погрешность замены средней скорости звука на приземную при нахождении наклонной дальности по времени распространения звукового пакета.
При квазинепрерывном способе радиоакустического зондирования атмосферы, каким является предложенный способ, теряется возможность измерения дальности по радиолокационному каналу. Тем не менее, остается возможность измерения дальности по акустическому каналу на основании известных моментов начала и конца акустической посылки и приземной скорости звука. Оценим погрешность измерения дальности по акустическому каналу для приземной температуры T1.
За время dt звук проходит со скоростью cs(x)=q[T(x)]1/2, где q=20,053, расстояние dx= q[T(x)] 1/2dt. Отсюда измеряемое время t0 связано с истинным расстоянием x0 соотношением
Погрешность вычисления расстояния x0 по значениям t0 и T1 определим из равенства
Δ = 1-t0q(T1)1/2/x0. (10)
Пусть приземная температура T1=293 К, температура на высоте x0 равна T2= 301 К. Если температура имеет линейный профиль
T(x)=T1+ax, T2=T1+ax0, (11)
то из (9), (11) находим
Подставим (12) в (10), получим погрешность при линейном профиле
Δ = 1-2[(T1T2)1/2-T1]/[(T2-T1). (13)
Оценим количественно погрешность измерения дальности по акустическому каналу при наиболее "неблагоприятных" атмосферных условиях. Приземной температуре T1= 293 К соответствует скорость звука Cs1=qT1 1/2 = 343,2 м/с. Для температуры на высоте 500 м T2=301K скорость звука Cs2=347,9 м/с. Заметим, что положительное различие температур на минимальном и максимальном высотном уровнях, равное 8К, отображает максимальную мощность приземной температурной инверсии, согласно нашим экспериментальным данным для 500-метрового слоя атмосферы. Отсюда, согласно (13) получаем, что погрешность вычисления дальности Δ не превзойдет 0,7%.
В реальном пограничном слое атмосферы профиль температуры может заметно отличаться от линейного. Рассмотрим случай I, когда промежуточные температуры лежат выше, чем при линейном профиле. В реальной атмосфере подобное высотное изменение температуры присуще слоям, лежащим ниже приподнятой температурной инверсии. В качестве конкретного примера можно рассмотреть погрешность вычисления расстояния при температурном профиле в виде параболы
T(x)=T1+ax2, T2=T1+ax0 2. (14)
Из (9) и (14) находим, что t0=X/(q•a1/2), где
Подставим (15) в (10), получим погрешность при квадратичном температурном профиле, лежащем выше линейного,
Δ1= 1-XT1/2/(T2-T1)1/2= 0,449% . (16)
Рассмотрим случай II, когда промежуточные температуры лежат ниже, чем при линейном профиле. В реальной атмосфере подобное высотное изменение температуры характерно, например, для слоя приземной температурной инверсии. В качестве примера рассмотрим погрешность вычисления расстояния при температурном профиле в виде параболы
T-T1=(ах)2/3; T2=T1+(ax0)2/3. (17)
Из (9) и (17) находим с учетом замены переменных (ах)1/3=y, что t0= 3Q/(2qa), где
Подставим (18) в (10), получим погрешность при квадратичном температурном профиле, лежащем выше линейного
Δ2= 1-(3Q/2)T
Сравнивая погрешности, рассчитанные на основании соотношений (13), (16), (19), видим, что измерение расстояния по акустическому каналу при известных времени t0 и приземной температуре T1 можно осуществить в различных атмосферных условиях с достаточно высокой точностью.
Температура воздуха и ее флуктуации существенного влияния на воздушное судно, как правило, не оказывают. С точки зрения потребностей непосредственного обеспечения авиации информацией о температуре, считается допустимым ее измерение с точностью ±1oC [9] . Однако с экономической точки зрения важность точного знания температуры имеет большое значение. Так, согласно анализу, содержащемуся в [15. Безопасность и экономика воздушного транспорта (франц. ) /Goas Jacques// /Meteorologie, 1991, no 36. P. 35-40], увеличение температуры на 1oC для большегрузных самолетов влечет за собой уменьшение полной коммерческой нагрузки, для некоторых типов самолетов на 0,5 т.
Знание высотного распределения температуры над ВПП весьма важно по причине известной связи сдвига ветра со стратификацией температуры [16. Шошин В. М. О связи сдвига ветра со стратификацией температуры //Тр. Укр. регион. НИИ Госкомгидромета, 1985. Т 210. С. 95-99. 17. Jansson P. Low-level vertical windshear and temperature inversions observed at Sundvalls aerodrom/Publ. Zentralast. Meteorol. und Geodyn. Wien. 1981, no 253. P. 197-201]. Информация о характере температурной стратификации часто позволяет самостоятельно, без ветровых измерений, определить пространственно-временное положение зон повышенных сдвигов ветра и на основании динамики термических полей получить кратковременный прогноз появления или распада зон сильных сдвигов ветра.
Поэтому в предложенном методе рассмотрена возможность повышения точности определения температурно-ветрового зондирования путем уточнения средней скорости звука на дистанции зондирования.
Определение средней скорости звука на дистанции зондирования.
По доплеровскому смещению определяют скорости звука в направлениях по и против ветра в некотором слое, где находится область отражения.


Среднее арифметическое этих величин равно скорости звука в слое cs= (c's+c''s)/2. По величине cs из формулы Лапласа определяют температуру воздуха в слое T=(cs/q)2, где q=(kR/mв)/1/2=20,053 - постоянная, слабо зависящая от давления, температуры и влажности воздуха, k - отношение удельных теплоемкостей воздуха при постоянном давлении (Сp) и постоянном объеме (Сv), R - газовая постоянная, mв - молекулярная масса воздуха.
Средняя скорость звука на дистанции зондирования 
Таким образом, предложенный способ благодаря новым операциям, указанным в формуле изобретения, позволяет исключить недостатки прототипа, решает поставленную задачу и обеспечивает достижение необходимого технического результата. Предложенный способ дополнительно обладает следующими полезными эффектами.
1. Наклонное двухлучевое зондирование по и против горизонтального ветра под углами места, принятыми в данном способе, позволяет исключить ограничения дальности зондирования, обусловленные ветровым выносом звукового пакета из диаграммы направленности радиолокатора, причем акустическая и ЭМ диаграммы излучения и приема сравнимы по угловым размерам и не требуют применения больших апертур.
2. Исключается необходимость создавать мощную широкоугольную акустическую посылку, мощный узкий радиолуч и сканировать его.
3 Появляется и реализуется возможность использовать радиоимпульсный сигнал с небольшой частотной полосой и невысокой импульсной мощностью.
Как видим, предложенный способ может быть применен для мониторинга атмосферного пограничного слоя в районе аэропорта непосредственно над ВПП с требуемыми для авиации высотой и разрешением по высоте. В предложенном способе адаптивное наклонное РАЗ может обнаруживать опасные кратковременные сильные сдвиги ветра благодаря сокращению времени измерений за счет исключения времени на поиск направления горизонтального ветра. Это оказалось возможным в результате проведенного математического моделирования и измерения адекватных задаче параметров принимаемого сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОАКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2000 |
|
RU2196345C2 |
| КОМБИНИРОВАННАЯ РАДИО-И АКУСТИЧЕСКАЯ АНТЕННА | 1999 |
|
RU2168818C1 |
| Способ управления частотой электромагнитного излучения при радиоакустическом зондировании атмосферы | 1983 |
|
SU1130809A1 |
| Радиоакустический способ зондирования атмосферы | 1989 |
|
SU1658105A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ВЕТРА И ТЕМПЕРАТУРЫ ВОЗДУХА В АТМОСФЕРНОМ ПОГРАНИЧНОМ СЛОЕ | 2016 |
|
RU2634804C2 |
| Способ определения влажности воздуха радиоакустическим зондированием атмосферы | 1990 |
|
SU1780071A1 |
| Радиоакустический способ измерения температуры и скорости ветра в атмосфере | 1989 |
|
SU1709263A1 |
| Способ радиоакустического зондирования атмосферы | 1980 |
|
SU883837A1 |
| Десантный метеорологический комплект (варианты) | 2023 |
|
RU2811805C1 |
| АКУСТИЧЕСКИЙ ПЕРЕДАТЧИК СИСТЕМ АКУСТИЧЕСКОГО И РАДИОАКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ | 1999 |
|
RU2172002C1 |

Изобретение относится к метеорологии, а именно к способам определения параметров пограничного слоя атмосферы, и может быть использовано в интересах службы безопасности взлета и посадки самолетов. В способе производят круговое по азимуту моностатическое радиоакустическое наклонное зондирование вдоль осей с постоянным углом места, причем ширину диаграммы акустического излучения устанавливают равной угловому разрешению по азимуту и рассчитанной по углу места из решения нового уравнения с учетом профиля ветра в пограничном слое при различной стратификации атмосферы, параметры акустических посылок устанавливают с учетом заданных значений максимальной высоты зондирования, разрешения по высоте и интервала температур, радиоимпульсы имеют треугольную форму, причем длительность фронтов обеспечивает перекрытие максимальной наклонной дальности зондирования. 3 ил.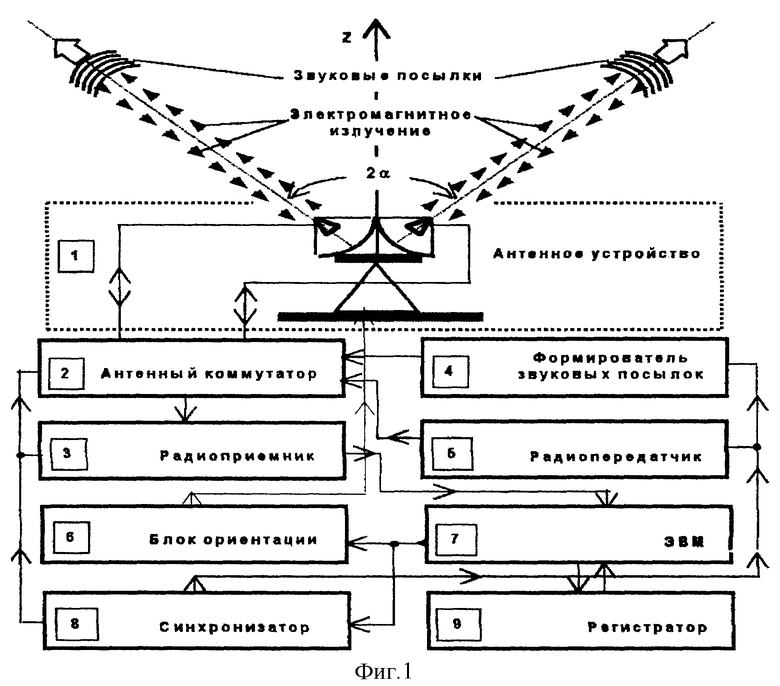
Способ радиоакустического наклонного зондирования атмосферы, заключающийся в том, что из точки на поверхности земли излучают акустические посылки и облучают их радиоимпульсами с длиной волны вдвое большей, чем акустическая, с разных направлений принимают электромагнитные эхо-сигналы и измеряют их параметры, по которым определяют характеристики атмосферы, отличающийся тем, что наклонное зондирование производят вдоль осей имеющих постоянный угол места, в полном азимутальном угле с шагом, равным угловому разрешению по азимуту, причем ширину диаграммы акустического излучения устанавливают равной угловому разрешению по азимуту, а по углу места равной интервалу углов места Θ0 = π/2-α0, где α0 находится из решения уравнения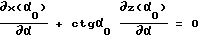
для профиля ветра в пограничном слое при различной стратификации атмосферы, излучают акустические посылки с периодом следования Ts ≥ R/cs+τs и длительностью τs = Δr/cs, где cs - приземная скорость звука в воздухе, R = H/sinΘ - наклонная дальность зондирования, H - высота зондирования, Δr - разрешение по наклонной дальности, которое выбирают с учетом оценки Δr ≥ 2λs, где λs - длина звуковой волны в атмосфере, акустическую посылку составляют из K временных дискретов, где K выбирают из условия перекрытия интервала температур на дистанции зондирования, в k-м дискрете (k = 1, 2 ... K) частоту устанавливают равной Fsk = Fsmin+kΔFs, где Fsmin, ΔFs задают в зависимости от состояния атмосферы, причем звуковую частоту среднего дискрета устанавливают по приземной температуре, излучают радиоимпульсы с периодом следования Te < 1 / (2Fs) и длительностью τe = 2R/ce, где ce - скорость света, причем τe = 2τф, τф - время нарастания и спада радиоимпульса, определяют разность доплеровских сдвигов эхо-сигналов в каждой азимутальной плоскости и выбирают ту азимутальную плоскость, для которой разность доплеровских сдвигов достигает максимального значения (Δ Ωдmax), вычисляют скорость локального горизонтального ветра по формуле Vг = λe Δ Ωдmax/(8πsinα), где λe - длина радиоволны, определяют расстояние до зондируемого объема по длительности принимаемого эхо-сигнала и по скорости звука с учетом времени распространения.
| SU 1290881 A, 24.05.1985 | |||
| КАЛИСТРАТОВА М.А., КОН А.И | |||
| Радиоакустическое зондирование атмосферы | |||
| - М.: Наука, 1985, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| US 4554546, 19.11.1985 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ХУДОЖЕСТВЕННО-ДЕКОРАТИВНОГО ИЗДЕЛИЯ ИЗ ДРЕВЕСИНЫ | 2015 |
|
RU2594554C1 |
| DE 3739049 A1, 24.05.1989. | |||
