Изобретение относится к нанотехнологическому оборудованию, а более конкретно к устройствам, обеспечивающим наблюдение, измерение и модификацию поверхности объектов в многоигольчатом комплексном режиме работы.
Известен сканирующий зондовый микроскоп (СЗМ), содержащий держатель объекта, сопряженный со сканером и устройством подвода, держатель зонда с зондом, а также источник излучения и приемник излучения, оптически сопряженные с зондом [1].
Недостатки указанного устройства заключаются в ограниченных функциональных возможностях, связанных с невозможностью проведения комплексных исследований объектов.
Известен также СЗМ, содержащий держатель объекта, сопряженный со сканером и устройством подвода, держатель зонда с пьезоэлементом, механически сопряженный с зондом, а также источник излучения и приемник излучения, оптически сопряженные с зондом [2].
Недостатки указанного устройства заключаются в ограниченных функциональных возможностях, связанных с невозможностью проведения комплексных исследований объектов. Второй недостаток заключается в недостаточной надежности устройства, которая связана с ограниченным диапазоном Z-перемещения сканера.
Задачей является создание сканирующего зондового микроскопа с многофункциональным анализатором.
Технический результат изобретения заключается в расширении функциональных возможностей и повышении надежности устройства.
Это достигается тем, что в сканирующий зондовый микроскоп, содержащий держатель объекта, сопряженный со сканером и устройством подвода, держатель зонда с пьезомодулем, механически сопряженным с зондом, а также источник излучения и приемник излучения, оптически сопряженные с зондом, введен трехкоординатный привод держателя зонда, зонд выполнен в виде набора модулей, состоящих из упругих элементов и игл, причем каждый модуль имеет резонансную частоту, отличную от других.
На фиг. 1 изображен многоигольчатый СЗМ.
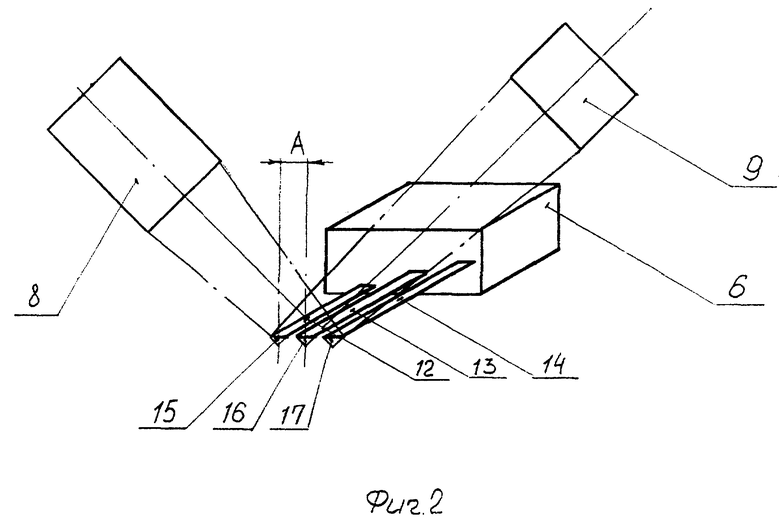
На фиг. 2 - первый вариант выполнения зонда.
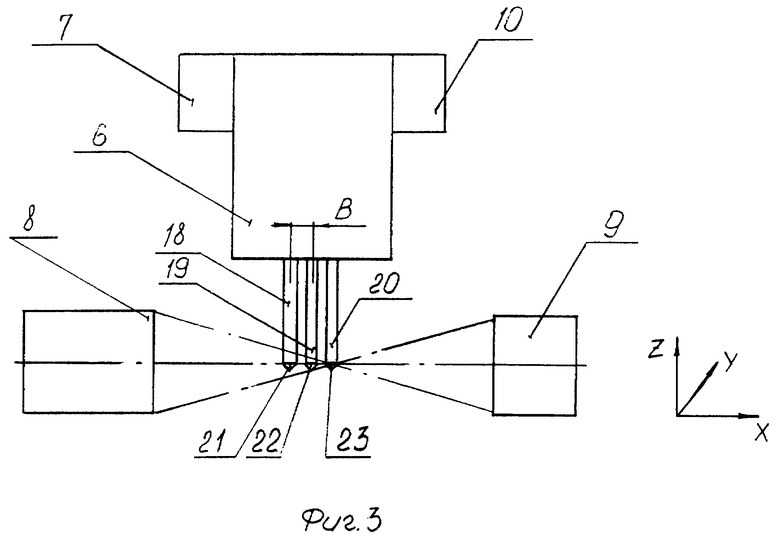
На фиг. 3 - второй вариант выполнения зонда.
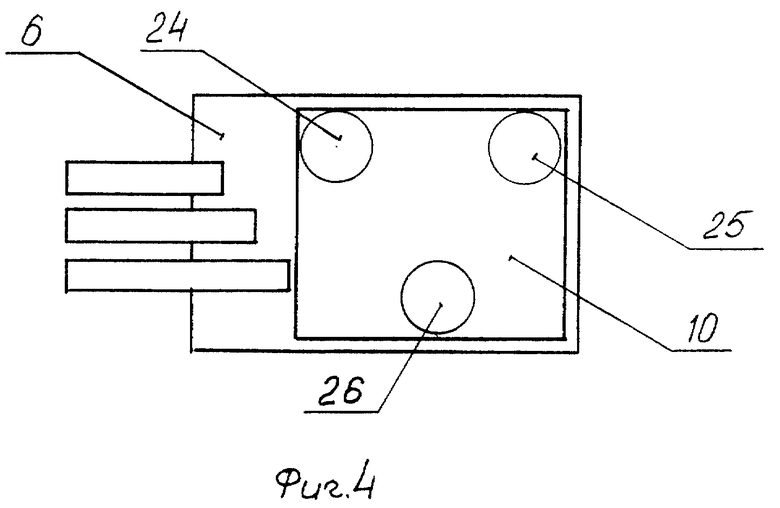
На фиг. 4 - вариант выполнения привода.
Сканирующий зондовый микроскоп содержит держатель объекта 1 (фиг. 1) с объектом 2, закрепленный на сканере 3, сопряженном с устройством подвода 4. Зонд 5 закреплен в держателе 6 зонда, механически сопряжен с пьезомодулем 7 и оптически сопряжен с источником излучения 8 и приемником излучения 9. Держатель 6 соединен также с приводом 10. Объект 2, сканер 3, устройство подвода 4, зонд 5, пьезоэлемент 7, источник излучения 8, приемник излучения 9 и привод 10 подключены к блоку управления 11.
Зонд 5 (фиг. 2) состоит из набора модулей, оптически сопряженных с источником излучения 8 и приемником излучения 9. На фиг. 2 каждый модуль состоит из, например, плоских упругих элементов 12, 13 и 14, соединенных с иглами 15, 16, 17. Размер А может быть в пределах нескольких мкм, что обеспечивает одновременную фокусировку излучения источника 8 (например, LDMII56) с размером пятна порядка 20 мкм на всех упругих элементах. Фотоприемник 9 может быть четырехсекционным (например, ФД-19КК).
Резонансная частота n-го элемента fn отлична от резонансных частот других элементов.
Вариант технологии формирования зонда описан в приложении 1.
Зонд может представлять собой также набор нитевидных упругих элементов 18, 19 и 20, например световодов, с иглами 21, 22 и 23 (фиг. 3), расположенных в проходящем излучения 9. Расстояние В между модулями в данном случае может быть в несколько десятков мкм, что позволит проводить раздельный анализ сигналов. Каждый модуль, как и в первом случае, должен иметь отличную от других резонансную частоту. Иглы 21, 22 и 23 могут быть расположены как по направлению Z, так и по направлению Y, при этом в первом случае объект располагают в плоскости XY, а во втором - XZ. Колебание упругих элементов в обоих случаях происходит в плоскости YZ.
Иглы 15, 16, 17, а также 21, 22, 23 могут быть выполнены из диэлектрика, проводника, магнитного и оптического материала и т.п. для проведения комплексных исследований вещества. Количество упругих элементов и игл может отличаться от трех. Пьезомодуль 7 может состоять как из одного, так и из набора пьезоэлементов, сопряженных с упругими элементами. Следует заметить, что приведенная схема СЗМ позволяет его использовать в вакуумном режиме (см. , например, [1]).
Отличие блока управления 11 от известного не является предметом изобретения, носит количественный характер и более подробно не описан. При необходимости с вариантом исполнения блока 11 можно ознакомиться в приложениях 2, 3.
Привод 10 (фиг. 4) может состоять из трех пьезоприводов 24, 25 и 26 типа ППУ1-ППУ8.
Предлагаемый многоигольчатый сканирующий зондовый микроскоп работает следующим образом. Объект 2 закрепляют на держателе 1. Посредством устройства подвода 4 производят сближение объекта 2 с зондом 5, после чего приводом 10 осуществляют выравнивание игл относительно плоскости объекта 2. Сканирование объекта 2 осуществляют посредством сканера 3.
Применение многозондовых (многоигольчатых) систем, при использовании одного пьезоэлемента, предполагает применение принципов мультичастотного обращения и считывания состояния колебаний отдельных зондов. Обращение происходит резонансным возбуждением колебаний требуемых зондов, которое осуществляется возбуждением вынужденных колебаний, посредством приложения предварительно синтезированного периодического многочастотного сигнала. Этот многочастотный сигнал формируется следующим образом:
- измеряют частотную характеристику зондов приложением разворачиваемого по частоте сигнала к генератору акустических колебаний (пьезоэлементу) и регистрацией амплитудного отклика колебаний многозондовой системы в процессе развертки;
- считывают состояния колебания каждого зонда параллельной системой датчиков - акустоэлектронных преобразователей; электрический сигнал с датчиков анализируется с применением предварительно настроенной многочастотной измерительной системы - многочастотного резонансного анализатора (не показан).
Учитывая, что в вакууме в отсутствие газовых демпферов колебаний добротность каждого упругого элемента порядка 1000, следует надеяться на более прецизионную возможность анализа колебания и получения более высокого, чем на воздухе, разрешения как в режимах амплитудной, так и в особенности фазовой детекции.
Применение принципов частотного выделения сигнала позволяет обойтись без лишних проводников, так как для систем возбуждения колебаний резонансные и вынужденные колебания упругих элементов осуществляются путем подвода акустических колебаний посредством, например, одного пьезоэлемента и многочастотного синтезатора электрического сигнала.
Данная конструкция позволяет проводить комплексные исследования поверхности (туннельные, атомно-силовые, магнитные, оптические и т.п.) в многоигольчатом режиме, проводя временное построчное разделение информации в последовательном и параллельных режимах. Возможен также одно-игольчатый режим работы крайними иглами при наклонном расположении зонда 5. Многоигольчатый режим позволяет также производить контроль электрических параметров элементной базы наноэлектроники. Вышеперечисленное расширяет функциональные возможности СЗМ. Использование привода держателя зонда помимо функции выравнивания позволяет увеличить диапазон Z при сканировании, что помимо расширения функциональных возможностей увеличивает надежность устройства.
Литература
1. Q. Dai et. al. A variable temperaturt ultrahigh vacuum atomic force microscope. Rev. Sci. Instrum. 66 (II), November 1995, p. 5266-5271.
2. S. Wegscheider et. al. Scanning near field optical lithography. Thin Solid Films 264 (1995), p. 264-267.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2012 |
|
RU2510009C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С ОПТИЧЕСКИМ МИКРОСКОПОМ | 2009 |
|
RU2488126C2 |
| ШИРОКОПОЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2001 |
|
RU2210730C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С ЖИДКОСТНОЙ ЯЧЕЙКОЙ | 2001 |
|
RU2210731C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2010 |
|
RU2442131C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С ИНВЕРТИРОВАННЫМ ОПТИЧЕСКИМ МИКРОСКОПОМ | 2001 |
|
RU2180726C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОНТРОЛИРУЕМОЙ СРЕДОЙ ИЗМЕРЕНИЯ | 2008 |
|
RU2401983C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2009 |
|
RU2494406C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МЕХАНИЧЕСКОЙ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2003 |
|
RU2233490C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ СРЕЗАНИЯ ТОНКИХ СЛОЕВ ОБЪЕКТА | 2004 |
|
RU2287129C2 |
Изобретение относится к нанотехнологическому оборудованию, к устройствам, обеспечивающим наблюдение, измерение и модификацию поверхности в многоигольчатом комплексном режиме работы. В сканирующем зондовом микроскопе, содержащем держатель объекта, сопряженный со сканером и устройством подвода, держатель зонда с пьезомодулем, механически сопряженный с зондом, а также источник излучения и приемник излучения, оптически сопряженные с зондом, введен трехкоординатный привод держателя зонда, зонд выполнен в виде набора модулей, состоящих из упругих элементов, причем каждый модуль имеет резонансную частоту, отличную от других. Подобное выполнение сканирующего микроскопа позволяет расширить функциональные возможности и повысить его надежность. 4 ил.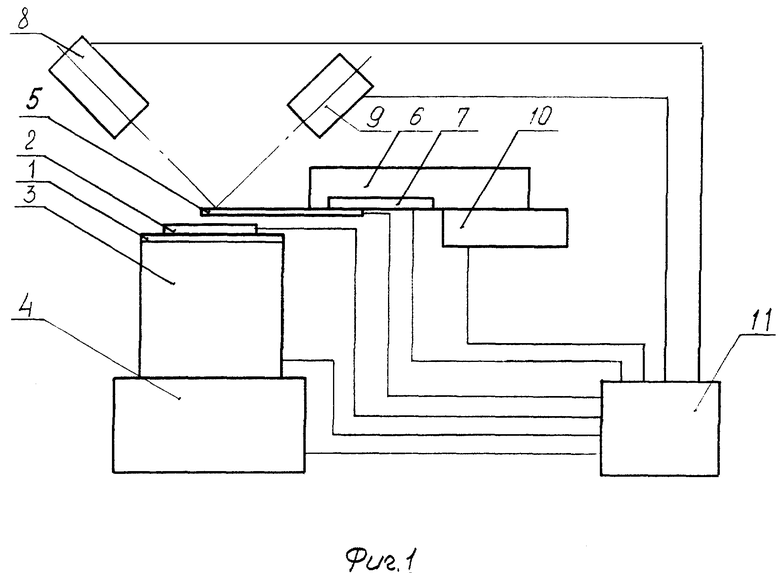
Сканирующий зондовый микроскоп, содержащий держатель объекта, сопряженный со сканером и устройством подвода, держатель зонда с пьезомодулем, механически сопряженный с зондом, а также источник излучения и приемник излучения, оптически сопряженные с зондом, отличающийся тем, что в него введен трехкоординатный привод держателя зонда, зонд выполнен в виде набора модулей, состоящих из упругих элементов и игл, причем каждый модуль имеет резонансную частоту, отличную от других.
| DE 4405292 С1, 22.06.1995 | |||
| МНОГОЗОНДОВЫЙ КАНТИЛЕВЕР ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 1996 |
|
RU2124251C1 |
| US 5468959 21.11.1995 | |||
| US 5753912 А, 19.05.1998. | |||

