Изобретение относится к нанотехнологическому оборудованию, а более конкретно к устройствам, обеспечивающим измерение и модификацию поверхности площадью до 1 мм2 в режиме непрерывного сканирования, например в туннельном, близкопольном оптическом и атомно-силовом режимах. Благодаря большому полю сканирования возможно использование устройства в условиях низких температур.
Известен малогабаритный низкотемпературный сканирующий туннельный микроскоп [1] , содержащий несущий фланец, грубый привод сближения зонда и объекта по координате Z, сопряженный с держателем объекта, и держатель зонда, установленный на точном X, Y, Z приводе. При этом грубый привод выполнен из двух сопряженных упругих элементов с различной жесткостью.
Недостатки указанного устройства заключаются в противоречии, связанном с использованием упругих элементов в держателе привода, что, с одной стороны, обеспечивает подвод, а с другой - ограничивает его диапазон при условии малогабаритности.
Это приводит к сужению функциональных возможностей при использовании разнотолщинных объектов и зондов различной длины, а также усложняет первоначальную их установку. Кроме этого, использование упругих элементов уменьшает резонансные частоты конструкции, что приводит к увеличению погрешности измерения.
Следует также заметить, что применение трубчатого пьезосканера уменьшает диапазон X, Y, Z перемещений, что также ограничивает функциональные возможности устройства и снижает его надежность, особенно в условиях низких температур, где пьезомодуль пьезокерамики и, соответственно, величины перемещений уменьшаются примерно в 7 раз [2]. Трубчатый пьезосканер также имеет отклонение перемещающегося конца по окружности, что снижает его разрешающую способность.
Известен также низкотемпературный сканирующий зондовый микроскоп, содержащий держатель объекта, закрепленный на первом трехкоординатном пьезоприводе (X, Y, Z). При этом привод по координате, перпендикулярной плоскости объекта (Z), выполнен в виде набора дисковых с отверстием в середине пьезоэлементов. Привод по двум координатам, параллельным плоскости объекта (X, Y), выполнен в виде таких же пьезоэлементов, но кольцевые электроды из серебра, при этом, разрезаны на восемь 90o-ных изолированных друг от друга секторов. Микроскоп содержит также держатель зонда, сопряженный со вторым трехкоординатным приводом (X, Y, Z), состоящим из трех инерционных пьезоприводов [3] .
Это устройство выбрано в качестве прототипа предложенного решения.
Недостатки указанного устройства. Первый недостаток связан с ограниченным перемещением первого трехкоординатного привода, вызванным применением в нем пьезоэлементов расширения-сжатия. Величина этих перемещений при питающих напряжениях ~300 В и условии сохранения малогабаритности составляет величину порядка нескольких мкм. Это, соответственно, приводит к сужению функциональных возможностей устройства, что особенно сказывается при низких температурах [2].
Второй недостаток связан с низкой надежностью инерционных пьезоприводов, которая определяется поддержанием постоянных коэффициентов трения между их перемещающимися частями, что является трудновыполнимой задачей.
Задачей изобретения является создание прибора с увеличенным диапазоном сканирования, позволяющим, в частности, использовать его в условиях сверхнизких, до 4.2 К, температур.
Технический результат изобретения заключается в расширении функциональных возможностей и повышении его надежности.
Это достигается тем, что в широкопольном сканирующем зондовом микроскопе, содержащем держатель объекта с первым приводом, как минимум, по одной координате, перпендикулярной плоскости объекта, держатель зонда со вторым приводом, как минимум, по двум координатам, параллельным плоскости объекта, а также третий привод перемещения зонда относительно объекта по координате, перпендикулярной плоскости объекта, первый привод по одной координате содержит первый фланец с, как минимум, одним дисковым пьезобиморфом, закрепленным на нем по периферии, причем держатель объекта закреплен на дисковом пьезобиморфе в центральной его части, второй привод по двум координатам содержит второй фланец и рамку, а также, как минимум, один первый П-образный пьезобиморф с четырьмя наружными электродами, расположенными на его ножках, закрепленный одной ножкой на втором фланце, а другой - на рамке, а также, как минимум, один второй П-образный пьезобиморф с четырьмя наружными электродами, расположенными на его концах, закрепленный одной ножкой на рамке, а другой - на держателе зонда, причем плоскости П-образных пьезобиморфов взоимно перпендикулярны, а третий привод перемещения зонда относительно объекта по координате, перпендикулярной плоскости объекта, содержит плоскую пружину, соединенную с первым и вторым фланцами, а также толкатель, сопряженный со вторым фланцем с возможностью перемещения относительно него по координате, перпендикулярной плоскости объекта, и установленный с возможностью взаимодействия с первым фланцем.
Вариант установки дисковых пьезобиморфов заключается в выполнении, как минимум, одного места его крепления в виде шарнира.
Вариант установки П-образных пьезобиморфов заключается в, как минимум, одном шарнирном их креплении с рамкой и с держателем зонда.
На фиг.1 изображен широкопольный сканирующий зондовый микроскоп (ШСЗМ).
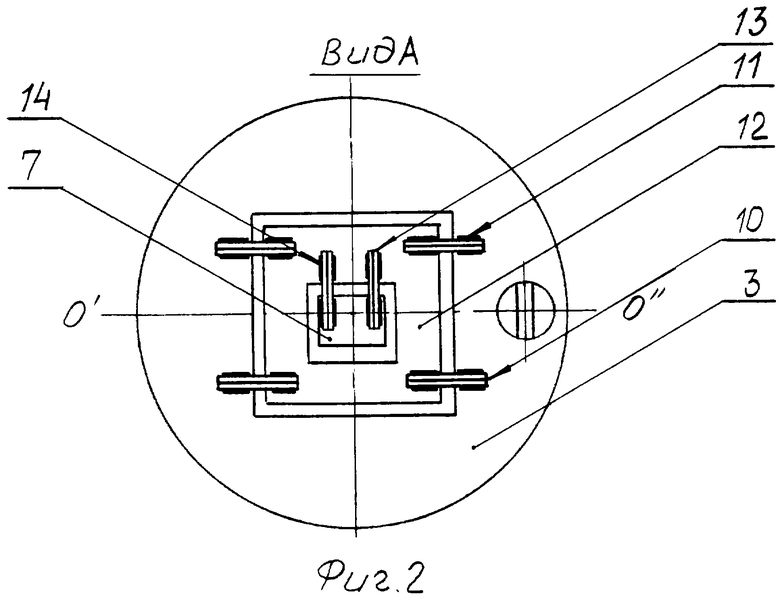
На фиг.2 - вид А по фиг.1.
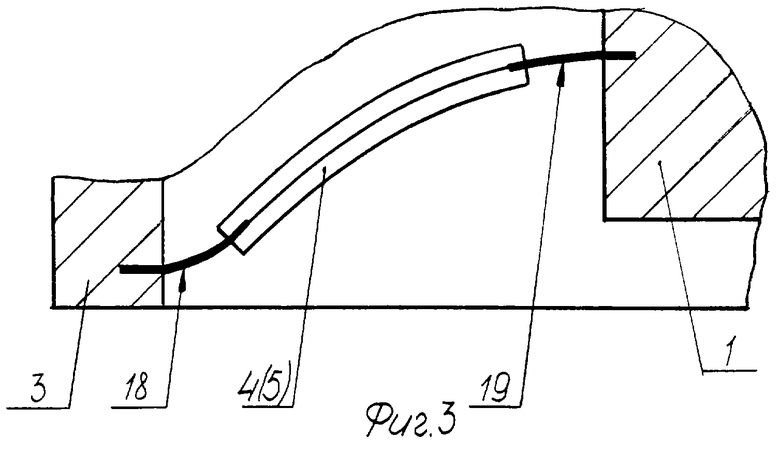
На фиг.3 - шарнирное, в виде плоских пружин закрепление дисковых пьезобиморфов.
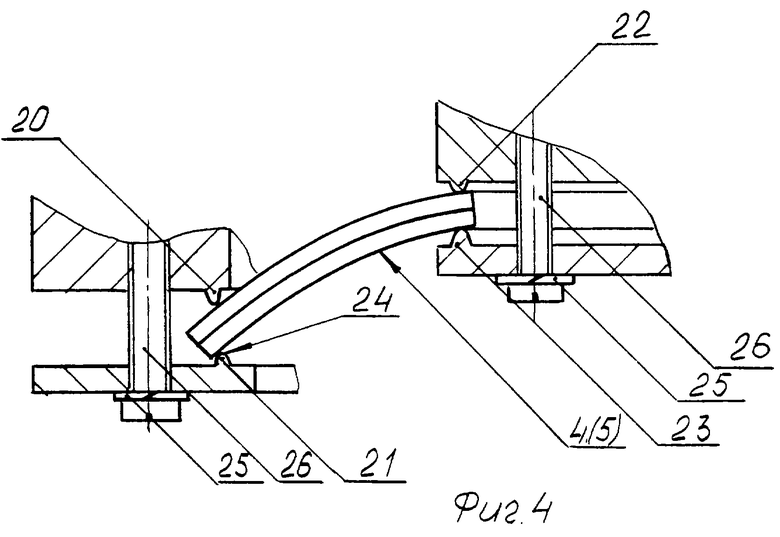
На фиг.4 - шарнирное, в виде кольцевых зубьев закрепление дисковых пьезобиморфов.
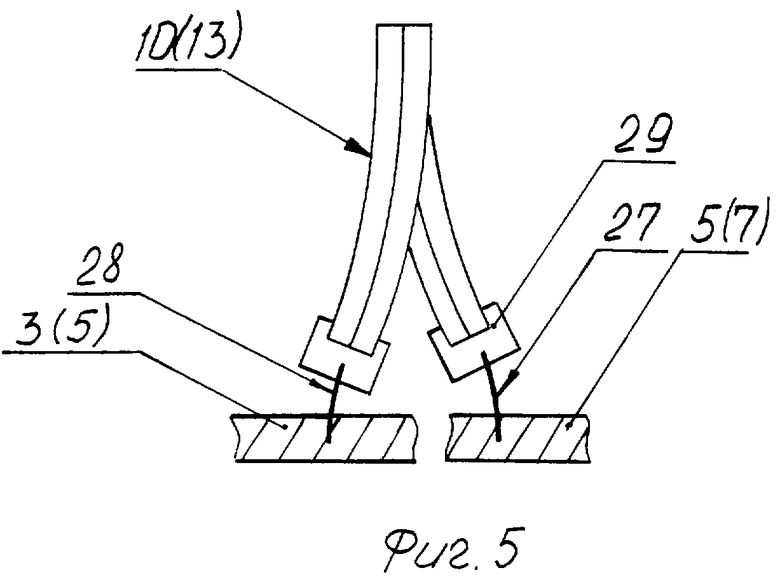
На фиг.5 - шарнирное, в виде плоских пружин закрепление П-образных пьезобиморфов.
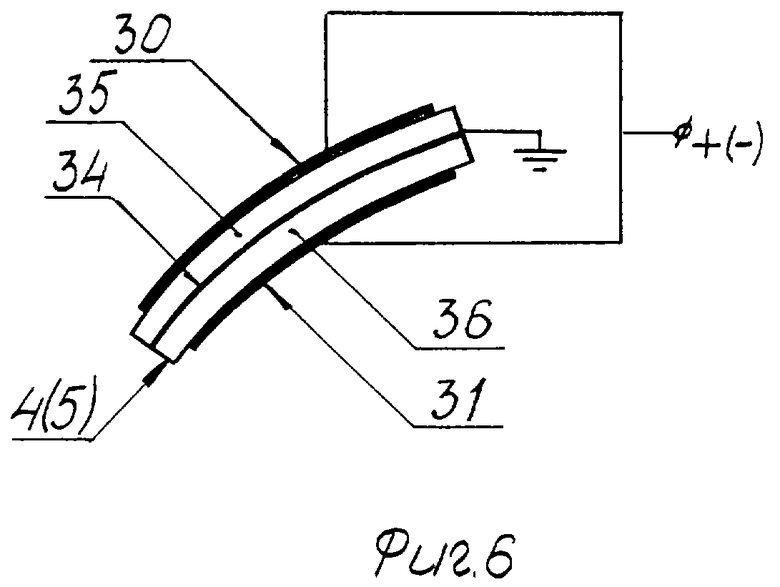
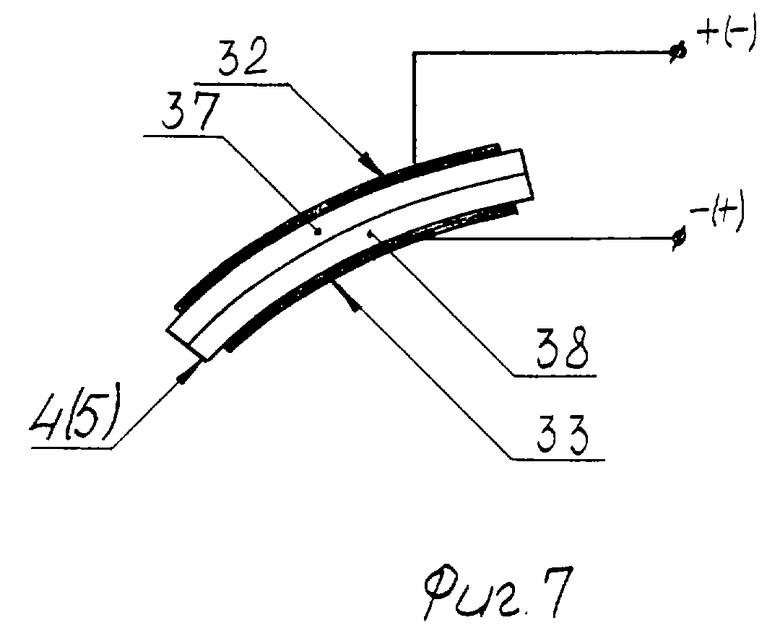
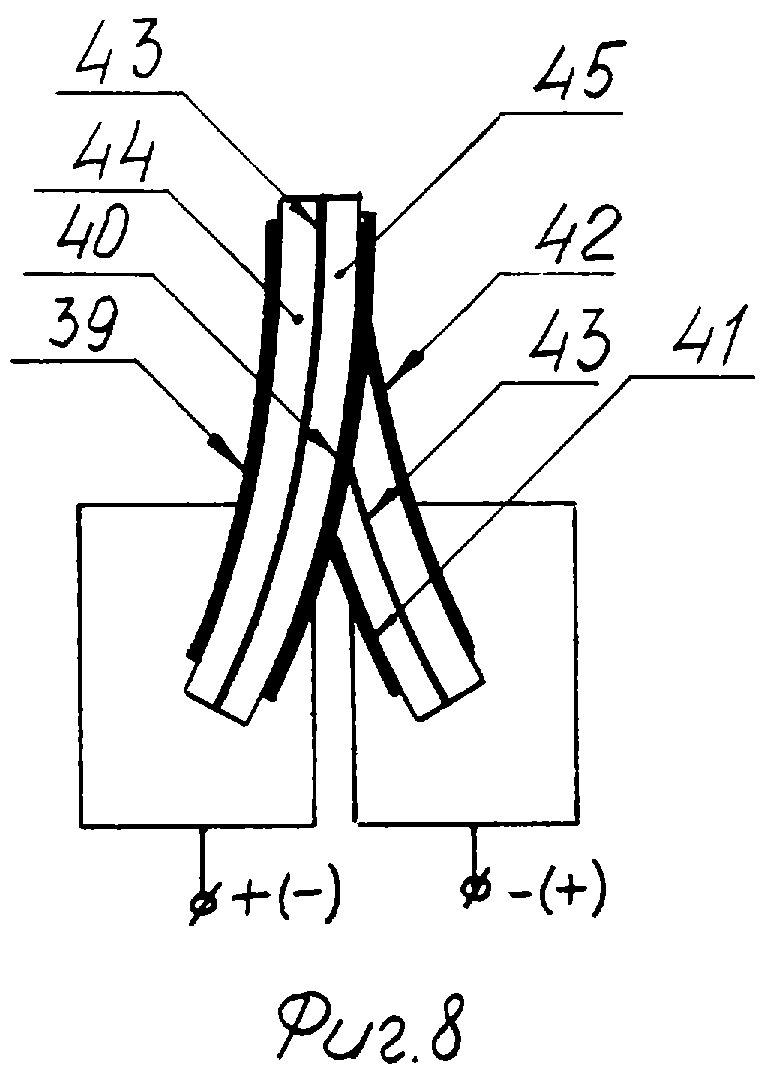
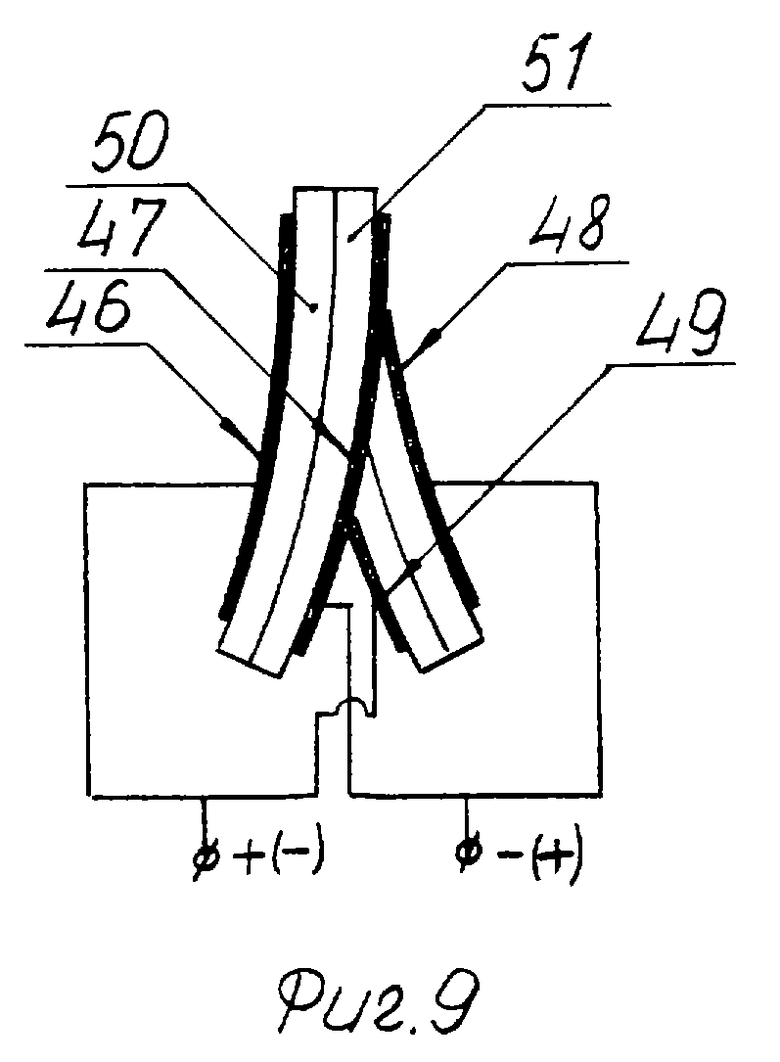
На фиг.6, 7, 8 и 9 - подключение пьезобиморфов к блоку управления.
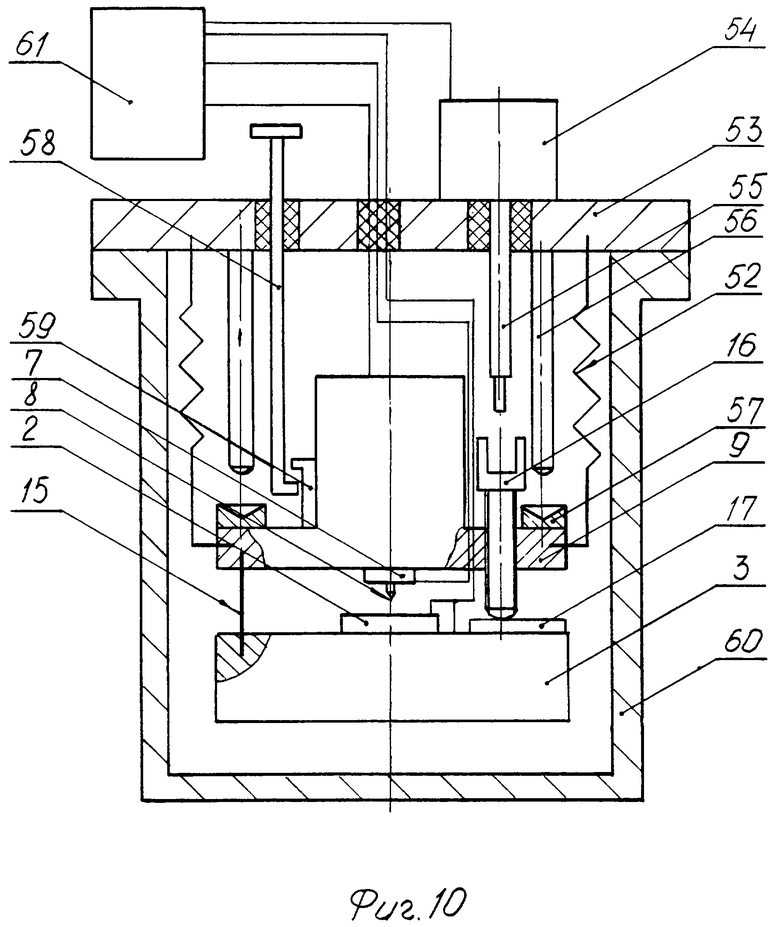
На фиг.10 - ШСЗМ в составе криогенной установки.
ШСЗМ содержит держатель объекта 1 (фиг.1) с объектом 2, закрепленный на первом приводе по одной координате Z, перпендикулярной плоскости объекта X, Y, выполненном в виде первого фланца 3 с, например, двумя дисковыми пьезобиморфами 4 и 5 с наружными электродами 6 (пьезобиморфы см. в [4]). Причем пьезобиморфы 4 и 5 закреплены на фланце 3 по периферии, при этом на центральной их части закреплен держатель 1. ШСЗМ содержит также держатель зонда 7 с зондом 8, закрепленный на втором приводе по двум координатам X, Y, параллельным плоскости объекта, выполненном в виде второго фланца 9, на котором закреплены, например, четыре первых П-образных пьезобиморфа 10 (прямоугольные пьезобиморфы см. в [5]) с четырьмя наружными электродами 11 (см. также фиг.2), расположенными на ножках каждого пьезобиморфа. При этом каждый П-образный пьезобиморф 10 (для перемещения по координате Y) закреплен одной ножкой на втором фланце 9, а другой ножкой - на рамке 12. Второй привод содержит, также, например, два вторых П-образных пьезобиморфа 13 (для перемещения по координате X) с четырьмя наружными электродами 14, расположенными на ножках каждого. При этом каждый П-образный пьезобиморф 13 закреплен одной ножкой на рамке 12, а другой на держателе зонда 7.
Следует заметить, что количество П-образных пьезобиморфов по координатам X, Y может отличаться от указанного на фиг.1 и 2. В предельном случае их может быть по одному на каждую координату, хотя в этом случае система будет иметь низкие резонансные частоты и низкую надежность.
Возможен также вариант закрепления третьего пьезобиморфа на держателе 7 и рамке 12 с противоположной стороны от пьезобиморфов 13 относительно оси O'-O''. С одной стороны, это повышает резонансные частоты системы и надежность, но с другой, усложняет держатель 7, что не всегда целесообразно.
Следует заметить, что, вообще говоря, зонд 8 может быть закреплен на держателе 1, а объект 2 - на держателе 7, т.к. в зондовой микроскопии рассматривается их взаимное перемещение.
Первый 3 и второй 9 фланцы соединены посредством третьего привода перемещения зонда 8 относительно объекта 2 по координате Z, перпендикулярной плоскости объекта 2. Третий привод содержит плоскую пружину 15, закрепленную на первом 3 и втором 9 фланцах, а также, например, винтовой толкатель 16, сопряженный со вторым фланцем 9 посредством резьбы (~0.3 мм/об) с возможностью перемещения относительно него по координате Z и установленный с возможностью взаимодействия с упором 17.
Шарнирное закрепление дисковых пьезобиморфов 4 и 5 может быть выполнено, например, путем использования материалов фланца 3 и держателя 1 с коэффициентом упругости меньшим, чем у пьезокерамики пьезобиморфов 4 и 5, либо путем использования вкладышей из этих материалов в местах крепления. Однако наиболее эффективным будет использование упругих шарниров в виде плоских пружин 18, 19 (фиг.3), закрепленных во фланце 3, держателе 1, и пьезобиморфе посредством клея, припоя, механического зажима (не показан) и т.п.
Эффективным также будет зажим пьезобиморфов 4 и 5 посредством кольцевых зубьев 20, 21, 22 и 23 (фиг.4) со скругленными кромками 24. Зажим между этими зубьями целесообразно выполнять механически равномерно по всей окружности, соблюдая условие неизменности величины силы зажима при термоциклировании. Самый простой способ - это использование пружинных шайб 25 под прижимными винтами 26.
Шарнирное закрепление П-образных пьезобиморфов может быть осуществлено способами, описанными выше, однако, использование упругих шарниров, выполненных в виде плоских пружин 27 и 28 (фиг.5), часто бывает наиболее предпочтительным.
Пружины 27 и 28 закреплены на ножках пьезобиморфов 10 (13) посредством переходников 29, а их противоположные части закреплены во фланце 3 и рамке 5 (соответственно в рамке 5 и держателе 7).
Подключение электродов 30, 31, 32 и 33 на дисковых пьезобиморфах 4 и 5 осуществляют в зависимости от наличия внутреннего электрода 34 (фиг.6) и его отсутствия (фиг.7). При этом пластины 35 и 36 поляризованы в одном направлении, а пластины 37 и 38 - в противоположном.
Подключение электродов 39, 40, 41 и 42 на П-образных пьезобиморфах при наличии внутреннего электрода 43 осуществляют, как показано на фиг.8. При этом пластины 44 и 45 поляризованы в одном направлении.
Подключение электродов 46, 47, 48 и 49 при отсутствии внутреннего электрода осуществляют, как показано на фиг.9. При этом пластины 50 и 51 поляризованы в противоположных направлениях.
Установку ШСЗМ в криостате (фиг. 10) осуществляют путем подвешивания фланца 9 посредством пружин 52 на платформе 53, на которой закреплен также двигатель 54, например ШД ПБМТ-200-265, со штоком-отверткой 55, установленным с возможностью взаимодействия с винтом 16. На платформе 53 закреплены также упоры 56, расположенные с возможностью взаимодействия с ловителями 57, и тяга 58, установленная с возможностью взаимодействия с захватом 59. Платформа 53 вместе с ШСЗМ помещена в криостат 60 (см. подробнее [1, 3, 10]). Двигатель 54, пьезобиморфы 10 и 13, зонд 8 и объект 2 подключены к блоку управления и контроля 61, который в материалах заявки не описан, с аналогичными блоками можно ознакомиться в [6, 7, 11].
Устройство работает следующим образом. Закрепляют объект 2 на держателе 1, а зонд 8 - в держателе 7 (способ закрепления не указан, см. подробнее [8] ). В случае криогенного использования микроскопа его подвешивают на пружины 52 и опускают в криостат 60. Посредством тяги 58 и захвата 59 производят подъем микроскопа вверх и, используя ловители 57 и упоры 56, осуществляют его ориентацию относительно штока 55.
Включают двигатель 54 и производят предварительное сближение объекта 2 с зондом 8. После достижения необходимого расстояния между ними (см. подробнее [8, 9]) двигатель 56 останавливают и производят путем его вращения в обратную сторону кинематическое размыкание штока 55 и винта 16. Далее опускают тягу 58 и вывешивают микроскоп на пружинах 52. После этого производят сканирование зонда 8 относительно объекта 2 и анализ или модификацию его поверхности (см. подробнее [9]).
Использование дисковых пьезобиморфов позволяет увеличить диапазон перемещения по координате Z до нескольких десятков микрон, что особенно важно в условиях сверхнизких температур для исследования шероховатой (до нескольких мкм) поверхности, это расширяет функциональные возможности приборов.
Использование П-образных пьезобиморфов позволяет довести режим сканирования до 1000 мкм по каждой координате, что также значительно расширяет функциональные возможности прибора, особенно в условиях сверхнизких температур.
Использование третьего привода, содержащего плоскую пружину с толкателем, повышает надежность прибора.
Применение шарнирного закрепления дискового пьезобиморфа увеличивает диапазон его перемещения за счет уменьшения влияния зажима. Это, соответственно, увеличивает величину перемещения объекта в режиме подвода и сканирования и расширяет функциональные возможности прибора.
Следует заметить, что по конструктивным соображениям (надежности, габаритов и т.п.) возможно закрепление дискового пьезобиморфа либо по периферии, либо в центре, это также приведет к увеличению его перемещения, сохранив баланс, например, с надежностью или габаритами. Применение более одного дискового пьезобиморфа уменьшает нефункциональные перемещения в плоскости X, Y держателя объекта.
Применение шарнирного закрепления П-образного пьезобиморфа помимо того, что также увеличивает диапазон его перемещения, приводит еще и к уменьшению перемещения по координате Z держателя зонда. Это приводит к расширению функциональных возможностей прибора.
Следует также заметить, что по конструктивным соображениям возможно шарнирное закрепление только одной ножки П-образного пьезобиморфа. При этом возникает паразитное перемещение по Z. Но, используя привод Z на дисковых пьезобиморфах, иногда целесообразно пойти на этот шаг. Например, для уменьшения массы подвижных элементов привода.
Следует также заметить, что шарнирное закрепление пьезобиморфов увеличивает надежность их работы за счет уменьшения усиления в зоне их контакта с элементами зажима.
Источники информации
1. Альтфедер И. Д., Володин А.П., Хайкин М.С. Малогабаритный низкотемпературный сканирующий туннельный микроскоп. ПТЭ. 1989 г., 5, с. 188-190.
2. Володин А. П., Панич А.Е. Применение пьезокерамических материалов в низкотемпературных сканирующих туннельных микроскопах. ПТЭ. 1989 г., 5, с. 190-193.
3. Хлюстиков И. Н., Эдельман B.C. Криогенная высоковакуумная установка для проведения сканирующей туннельной микроскопии. ПТЭ. 1996 г., 1, с. 158-165.
4. Изделия акустоэлектроники и пьезокерамики/ под ред. Парфенова. "Деловой мир", 1992 г., 167 с.
5. Catalog Physic Instruments, NanoPositioning. 1998.
6. Патент US 5874668, G 01 B 5/28, 1999.
7. Зондовая микроскопия для биологии и медицины. В.А. Быков и др. Сенсорные системы. 1998 г., т. 12, 1, с. 99-121.
8. Сканирующая туннельная и атомно-силовая микроскопия в электрохимии поверхности. А.И. Данилов. Успехи химии 64 (8), 1995 г., с. 818-833.
9. Сканирующая туннельная микроскопия. B.C. Эдельман. ПТЭ. 1989 г., 5, с. 25-49.
10. Патент US 5410910, G 01 B 5/28, 1995.
11. А.с. СССР 1550457, G 03 B 26/04, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЗИЦИОНЕР ТРЕХКООРДИНАТНЫЙ | 2005 |
|
RU2297078C1 |
| МНОГОЗОНДОВЫЙ ДАТЧИК КОНСОЛЬНОГО ТИПА ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2003 |
|
RU2249263C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
| УСТРОЙСТВО НАГРЕВА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2001 |
|
RU2218562C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МОДУЛЬ ЗАПОМИНАЮЩЕГО УСТРОЙСТВА СВЕРХВЫСОКОЙ (ТЕРАБИТНОЙ) ЕМКОСТИ | 2002 |
|
RU2242054C2 |
| ОПТИЧЕСКИЙ ЗОНД НА ОСНОВЕ КВАРЦЕВОГО РЕЗОНАТОРА ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2002 |
|
RU2221287C2 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
Изобретение относится к нанотехнологическому оборудованию, а более конкретно к устройствам, обеспечивающим измерение в режиме непрерывного сканирования в условиях низких температур. Сущность изобретения: в широкопольном сканирующем зондовом микроскопе, содержащем держатель объекта с первым приводом, держатель зонда со вторым приводом, а также третий привод перемещения зонда относительно объекта, первый привод по одной координате содержит первый фланец с как минимум одним дисковым пьезобиморфом, закрепленным на нем по периферии, причем держатель объекта закреплен на дисковом пьезобиморфе в центральной его части, второй привод по двум координатам содержит второй фланец и рамку, а также, как минимум, один первый П-образный пьезобиморф с четырьмя наружными электродами, расположенными на его ножках, закрепленный одной ножкой на втором фланце, а другой на рамке, а также как минимум один второй П-образный пьезобиморф с четырьмя наружными электродами, расположенными на его концах, закрепленный одной ножкой на рамке, а другой на держателе зонда, причем плоскости П-образных пьезобиморфов взаимно перпендикулярны, а третий привод перемещения зонда относительно объекта по координате, перпендикулярной плоскости объекта, содержит плоскую пружину, соединенную с первым и вторым фланцами, а также толкатель, сопряженный со вторым фланцем с возможностью перемещения относительно него по координате, перпендикулярной плоскости объекта, и установленный с возможностью взаимодействия с первым фланцем. Технический результат: возможность измерения в условиях сверхнизких температур. 2 з.п. ф-лы, 10 ил.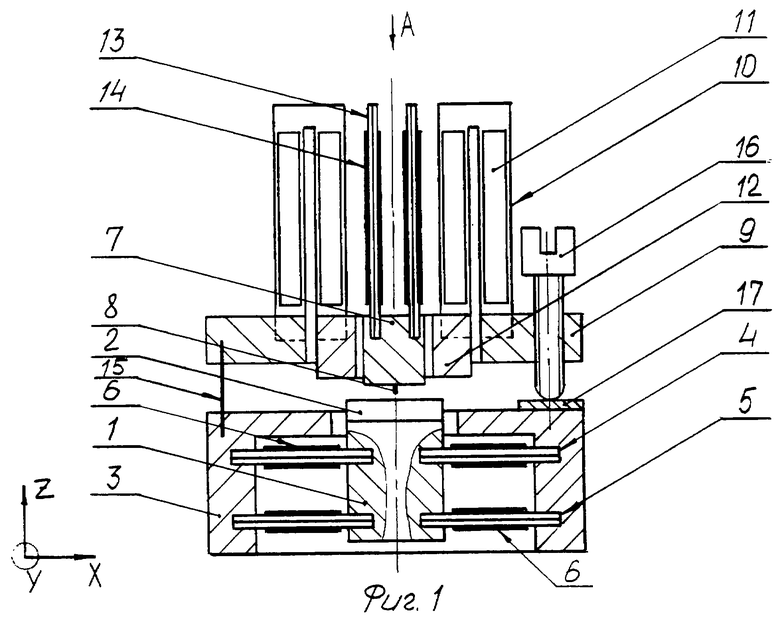
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| ХЛЮСТИКОВ И.Н., ЭДЕЛЬМАН В.С | |||
| Криогенная высоковакуумная установка для проведения сканирующей туннельной микроскопии | |||
| ПТЭ | |||
| Предохранительное устройство для паровых котлов, работающих на нефти | 1922 |
|
SU1996A1 |
| US 5874668 А, 23.02.1999. | |||

