Это изобретение относится к способам и устройству для контроля местоположения волокон для оптических волноводов или других прозрачных нитей. В общем случае, изобретение относится к способам и устройству для измерения расстояния до объекта или до части поверхности объекта.
В патентах США N 5.185.636, 5.283.628, 5.309.221, 3.982.816, 4,067.651, 4.280.827, журнале Applied Optics., Vo. 19, p. 2031-2033 (1980) и Европатенте N 608.538 описана техника контроля различных свойств волокон для оптических волноводов при их вытягивании из заготовок, включая контроль дефектов, в том числе для некруглых волокон.
Некоторые известные устройства схематично представлены на фиг. 1-3.
Предлагаемое изобретение повышает эффективность контролирующих систем вышеуказанного типа в части отслеживания положения волокна и управления положением волокна при его вытягивании. Такая информация о положении необходима для удержания волокна в центральном положении и для контроля его натяжения при измерении временной частоты стоячих волн вдоль волокна.
Существующие мониторы (устройства контроля) положения волокна формируют изображение волокна на детекторе и/или контролируют край волокна. Поскольку пространство в вытяжном устройстве ограничено, то использование дополнительного монитора местоположения наряду с монитором известного типа, контролирующим диаметр волокна, дефекты волокна и качество его покрытия, нежелательно.
Кроме того, существующие мониторы положения не способны обнаруживать очень малые колебания, и, следовательно, информация о натяжении волокна может быть потеряна, когда стоячие волны в волокне становятся слишком малыми. Далее, существующие мониторы, формирующие изображение волокна на детекторе, чувствительны к перемещениям волокна вперед и назад, которые выводят его из фокуса детектора. А именно, возможность отслеживать параллельные перемещения уменьшается при отклонении волокна от фокуса детектора. Такое снижение точности из-за расфокусировки ограничивает применение существующих мониторов для определения натяжения волокна.
С учетом сказанного, в основу изобретения положена задача создать усовершенствованные способы и устройство для контроля (измерения) расстояния до объекта, представляющего собой, например, волокно для оптических волноводов. Далее, более конкретная задача изобретения заключается в создании такого монитора положения волокна, который при минимальном дополнительном усложнении может быть совмещен с монитором описанного выше типа, контролирующим диаметр, дефекты и покрытие.
Для решения этих и других задач, изобретение в соответствии с определенными выше целями, представляет собой систему для определения расстояния до поверхности, содержащую:
средства (29, 31, 131) для детектирования света (68, 69) в множестве пространственно распределенных положений (L1, L2);
средства (23, 123) освещения для направления пучка (25, 125) света на поверхность (17, 113) таким образом, что по меньшей мере часть пучка рассеивается, т. е. диффузно отражается от поверхности (17, 13) на детекторы (рассеянный свет);
средства (50, 150), расположенные между поверхностью (17, 113) и детекторами (29, 31, 131) и предназначенные для пространственной модуляции рассеянного света, причем такая модуляция характеризуется пространственной частотой ωM;
средства (201, 202, 203, 204, 205, 206) определения пространственной частоты ωD пространственно модулированного рассеянного света на детекторах (29, 31, 131), причем расстояние между средствами (50, 150) пространственной модуляции и поверхностью (17, 113) есть функция ωD.
Средства для определения пространственной частоты ωD пространственно модулированного рассеянного света на детекторах могут быть различными. Например, эти средства могут подсчитывать интерференционные максимумы, минимумы и/или нулевые значения либо непосредственно на основе пространственных данных, определенных детектором, либо на основе таких данных, которые сглажены или отфильтрованы в цифровой форме. При анализе интерференционной картины пространственная частота ωD равна количеству интерференционных полос, деленному на характеристический размер детектора, например его длину. В предпочтительном варианте воплощения изобретения пространственную частоту ωD определяют в области пространственных частот путем выполнения преобразования, предпочтительно преобразования Фурье, для пространственных данных, сформированных средствами детектирования. При желании могут быть использованы другие методики анализа в области пространственных частот, такие как методика элементарных волн.
В некоторых предпочтительных вариантах воплощения изобретения система между поверхностью (17, 113) и средством (50, 150) пространственной модуляции включает систему линз (26, 27, 127) с положительной оптической силой. При расположении детектора (29, 31, 131) в задней фокальной плоскости системы линз расстояние между средством (50, 150) пространственной модуляции и поверхностью (17, 113) оказывается линейной функцией от ωD.
В другом предпочтительном варианте воплощения изобретения измеренное расстояние между волокном для оптических волноводов и измерителем используют в качестве одного из параметров в системе контроля вытягивания волокна из заготовки. Также предпочтительно, когда система контроля определяет диаметр волокна и толщину герметичного покрытия и отслеживает дефекты волокна.
На фиг. 1 показана схематическая диаграмма, иллюстрирующая основные элементы системы типа системы Воткинса для измерения диаметров волокон, использующей интерференционную картину в дальней зоне.
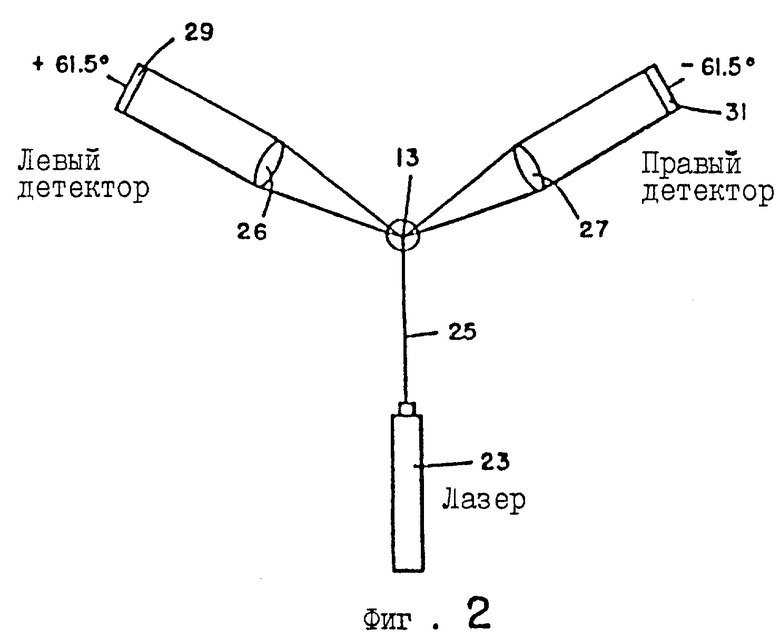
На фиг. 2 показана схема, показывающая элементы системы контроля и управления для волокна, в которой может быть использовано предлагаемое изобретение.
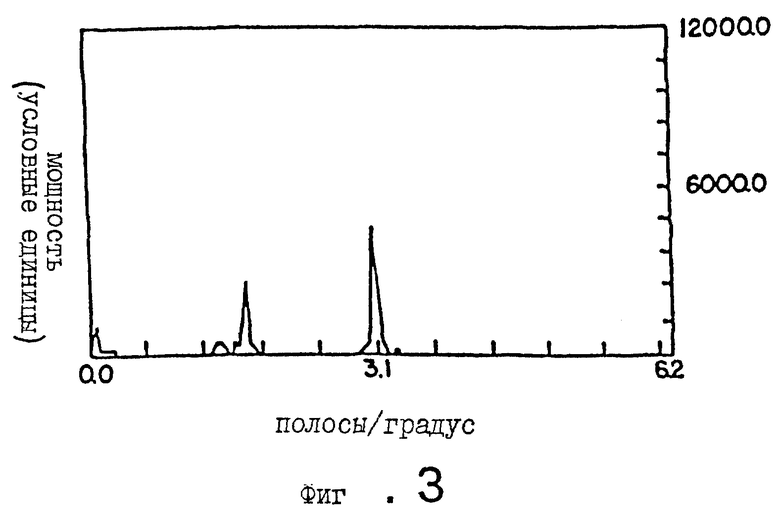
На фиг. 3 показан частотный спектр расчетной интерференционной картины в дальней зоне для пустотелого волокна диаметром 125 мм с центральным отверстием диаметром 5 мкм.
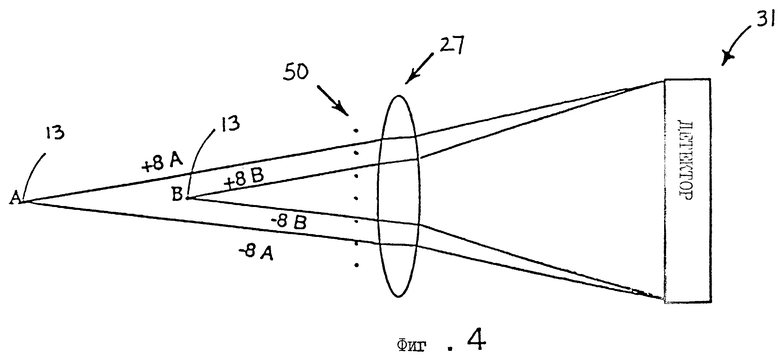
На фиг. 4 показана схема устройства согласно изобретению.
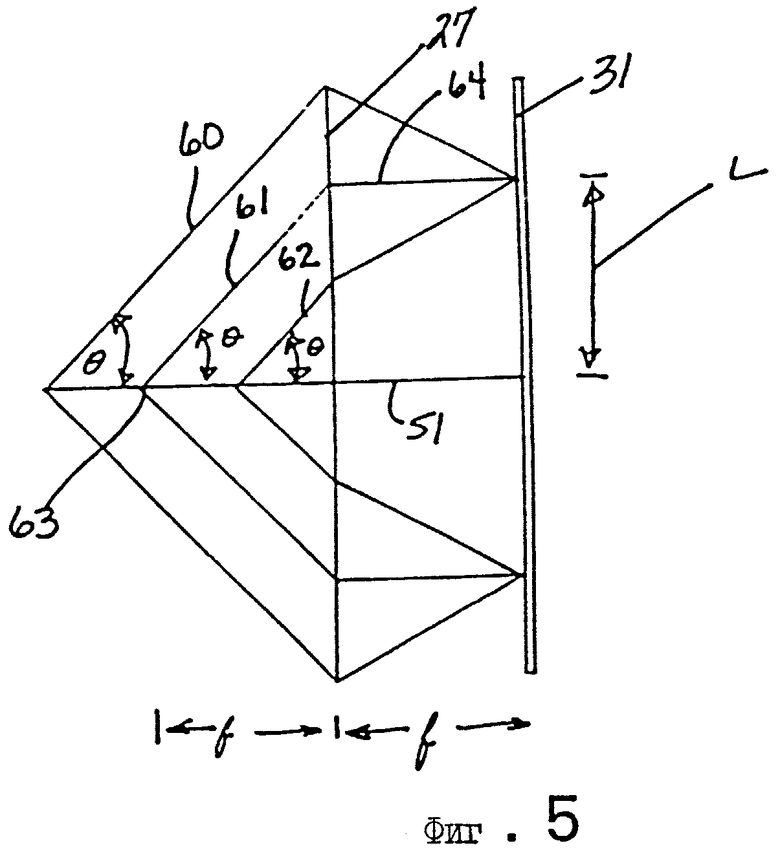
На фиг. 5 показана схема, иллюстрирующая эффекты, имеющие место при размещении детектора 31 в задней фокальной плоскости системы линз 27.
На фиг. 6 показана схема, иллюстрирующая геометрические соотношения, использованные при определении связи между ωM дифракционной решетки 50 Ронки и ωD детектора 31.
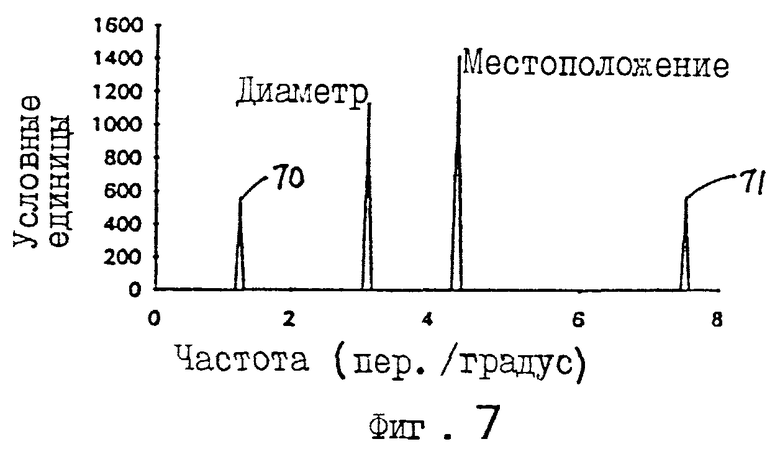
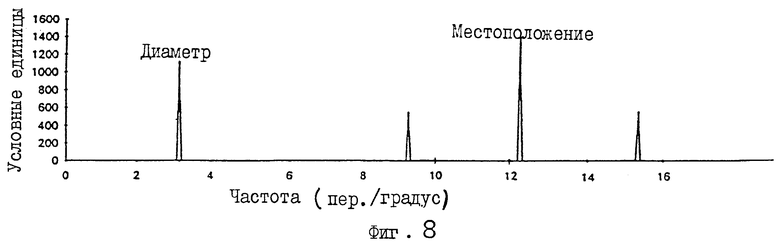
На фиг. 7 и 8 приведены диаграммы пространственного частотного спектра бездефектного волокна для оптических волноводов, положение и диаметр которого контролируют, используя устройство согласно фиг. 4. Положение волокна одинаково на обоих чертежах; ωM - приблизительно 4 периода/мм на фиг. 7 и приблизительно 12,3 периода/мм на фиг. 8.
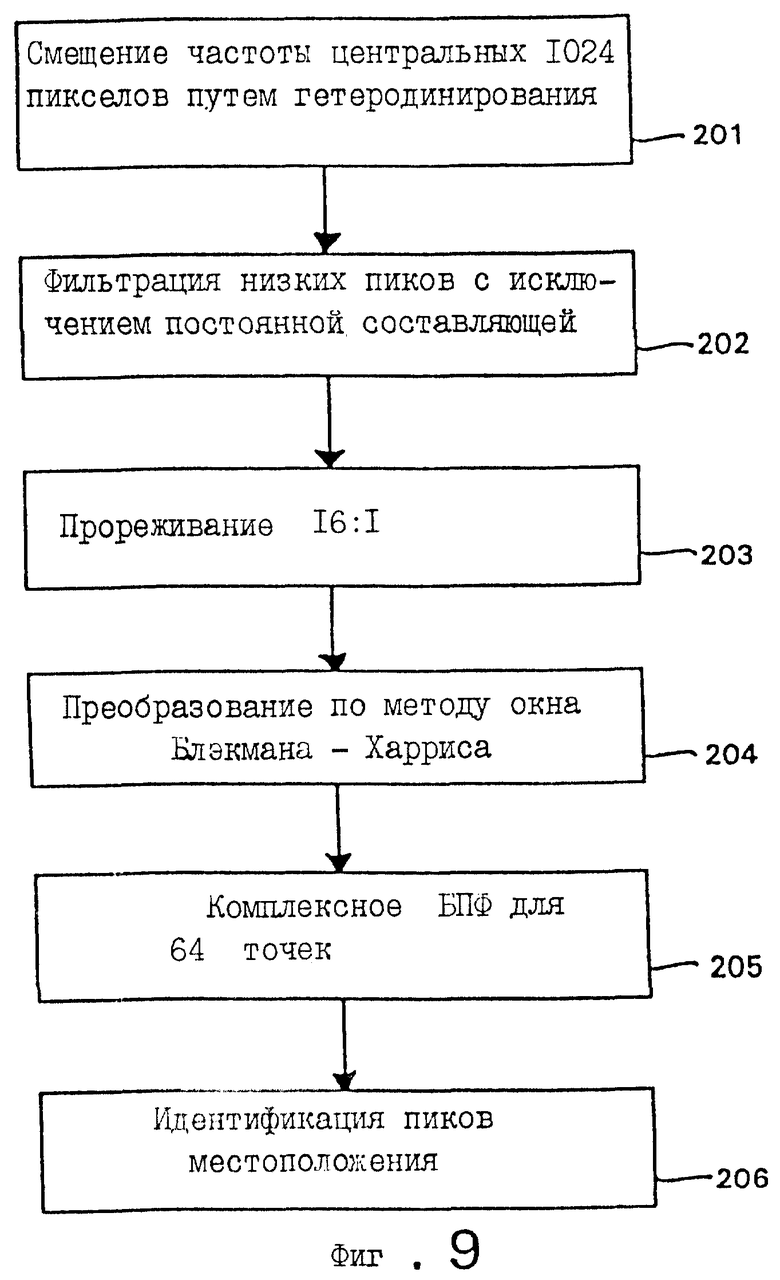
На фиг. 9 представлена блок-схема, показывающая предпочтительную процедуру генерирования спектра пространственных частот для использования согласно изобретению.
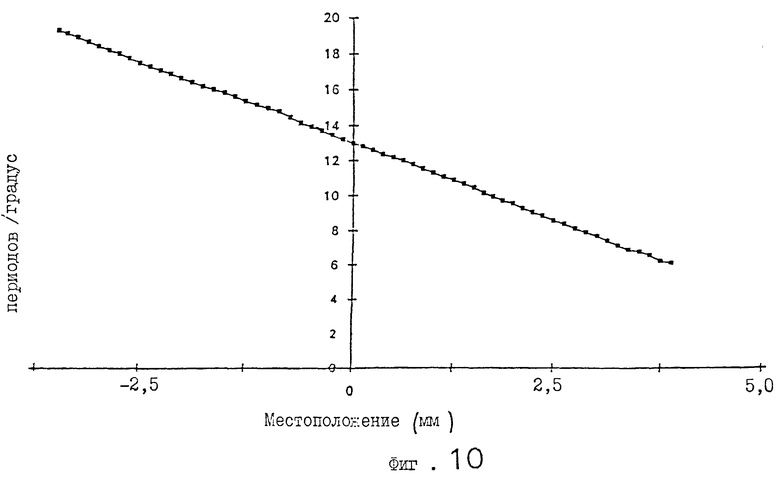
Фиг. 10 иллюстрирует линейность характеристики при использовании предпочтительного варианта воплощения изобретения.
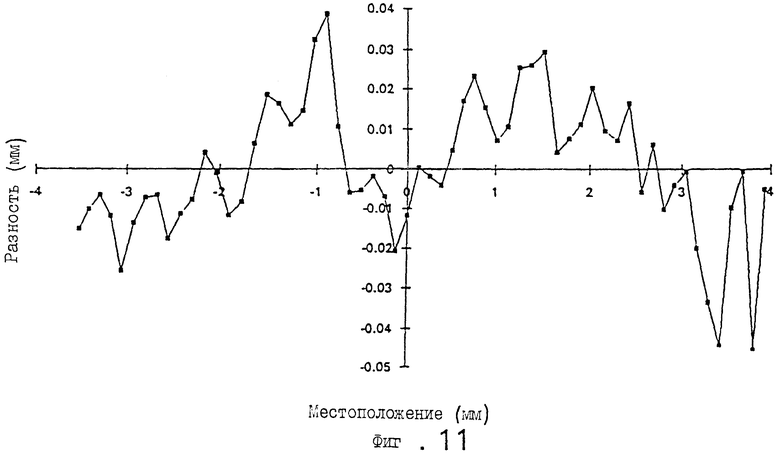
Фиг. 11 иллюстрирует точность, характерную для предпочтительного варианта воплощения изобретения.
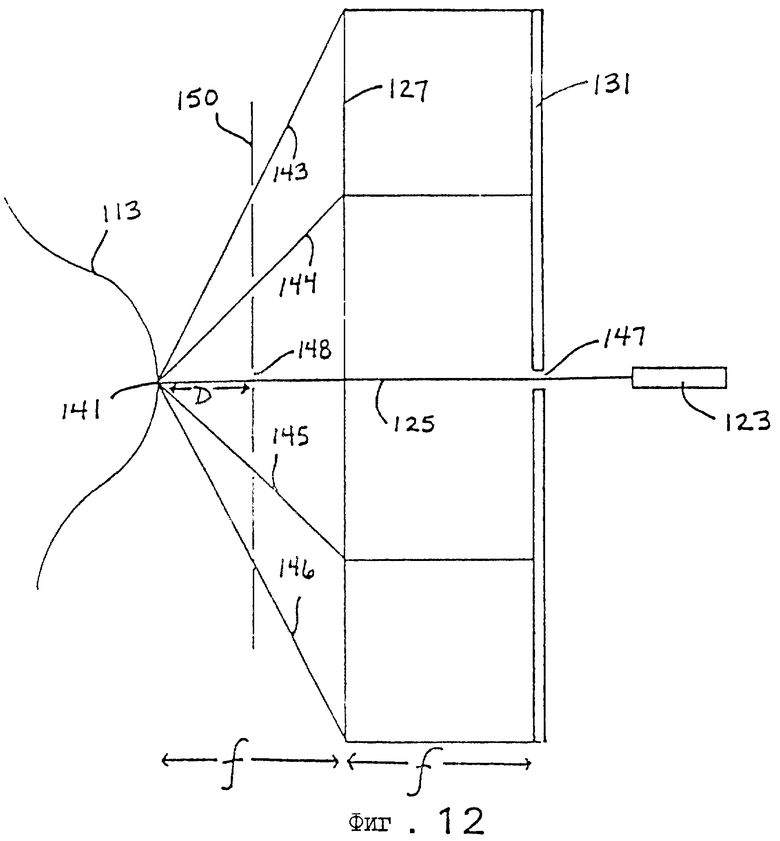
На фиг. 12 показано использование изобретения для определения расстояния D до диффузно отражающей поверхности 113.
На фиг. 4 показаны элементы системы контроля положения волокна согласно изобретению. Волокно 13 показано в двух положениях, отмеченных точками A и B (см. фиг. 4). Свет от волокна проходит сквозь средство 50 пространственной модуляции, систему линз 27 и воспринимается детектором 31. Детектор 31 может соответствовать типу по патенту США N 5.309.221.
Средство 50 пространственной модуляции имеет пространственную частоту ωM и пространственно модулирует этой пространственной частотой проходящий сквозь него свет. Средство пространственной модуляции может иметь вид маски или подобного приспособления, характеризуемого периодическим изменением светопропускания, фазы или других оптических параметров.
Предпочтительно выполнение средства 50 пространственной модуляции в виде дифракционной решетки Ронки. Последующее описание построено с учетом использования именно такой дифракционной решетки, однако при желании могут быть использованы и другие средства пространственной модуляции.
Как известно, решетка Ронки состоит из чередующихся непрозрачных и прозрачных полос, которые могут быть получены, например, нанесением узких полосок хрома на стеклянную пластину. Все прозрачные и все непрозрачные полосы имеют одинаковую ширину, однако ширина первых и ширина вторых не должна быть одинаковой. Соответственно, наряду с пространственной частотой ωM (равной единице, деленной на расстояние между, например, прозрачными полосами), дифракционная решетка Ронки характеризуется также коэффициентом заполнения, т.е. отношением ширины непрозрачной полосы к сумме ширин непрозрачной и прозрачной полос.
Предпочтительный коэффициент заполнения дифракционных решеток Ронки, используемых согласно изобретению, составляет примерно 0,15, т.е. около 15% площади решетки непрозрачны. Такой коэффициент заполнения предпочтителен, ибо обеспечивает относительно высокий уровень освещенности детектора 31, исключая тем самым проблемы с недостатком света на нем. При желании, при осуществлении изобретения, конечно, могут быть использованы и другие значения коэффициента заполнения.
Дифракционные решетки Ронки путем простой установки со стороны волокна в каждую из систем линз 26 и 27 можно легко встроить в показанный на фиг. 2 монитор, контролирующий диаметр, дефекты и покрытие. Эти решетки доступны по приемлемой цене.
Система линз 27 является возможным элементом системы, который, как объяснено ниже, линеаризует выходной сигнал системы контроля расстояния. При осуществлении изобретения могут быть использованы системы линз, подобные описанным в патенте США N 5.309.221.
Систему линз 27, имеющую положительную оптическую силу, предпочтительно располагают между дифракционной решеткой Ронки и детектором на расстоянии от него, равном фокусному расстоянию f этой системы линз. Иначе говоря, детектор находится в фокальной плоскости системы линз, а именно в ее задней фокальной плоскости. Фокальная плоскость системы линз имеет важное свойство, заключающееся в том, что параллельные лучи в пространстве объекта пересекают эту плоскость на одинаковом радиальном расстоянии от оптической оси системы.
Это свойство схематически иллюстрировано на фиг. 5, где 51 - оптическая ось системы, a L - радиальное расстояние от нее. Для линейного детектора 31 расстояние L является просто расстоянием от его центра, при условии расположения центра детектора на оптической оси. Как показано на этой фигуре, все параллельные пучки 60, 61 и 62 света отражены системой линз 27 так, что они попадают на детектор 31 на расстоянии L.
Луч 61 исходит из переднего фокуса 63 системы линз, соответственно, после преломления системой линз этот луч идет параллельно оптической оси, что показано позицией 64 на фиг. 5. Используя этот луч, можно легко определить для детектора расстояние L, соответствующее всем лучам, пересекающим оптическую ось под углом θ. Более конкретно, как видно на фиг.5, L определяют по формуле
L = f tgθ, (1)
где, как указано выше, f - фокусное расстояние системы линз.
Равенство (1) и фиг. 5 могут быть интерпретированы так: детектор заданной длины в задней фокальной плоскости положительной системы линз будет фиксировать одно и то же угловое расхождение света, приходящего от волокна, независимо от расстояния волокна до детектора. Этот эффект показан на фиг. 4 для детектора, длина которого соответствует угловому расхождению 16o относительно оптической оси системы линз. Как показано на этой фигуре, детектор 31 фиксирует свет в пределах угла ±8 независимо от того, расположено ли волокно 13 в положении A или в положении B.
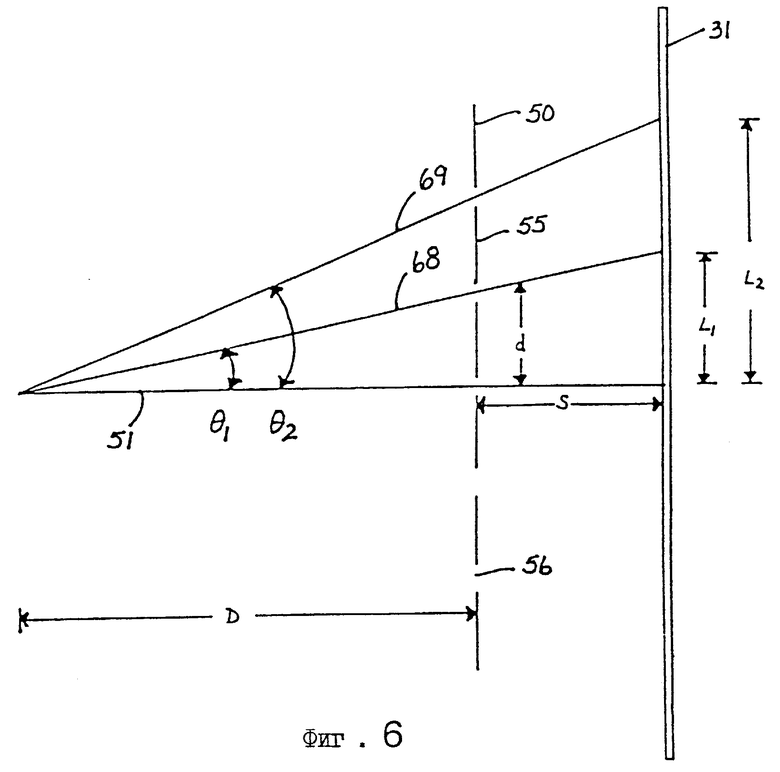
Работа системы измерения расстояния согласно изобретению схематически показана на фиг. 6, где 50 - дифракционная решетка Ронки, имеющая непрозрачные 55 и прозрачные 56 полосы, ориентированные перпендикулярно плоскости фигуры. Прозрачные полосы 56 расположены одна от другой на расстоянии d, равном 1/ωM. Дифракционная решетка Ронки удалена от детектора 31 на расстояние S.
Предположим, что волокно расположено на расстоянии D от дифракционной решетки Ронки. Лучи 68 и 69 от этого волокна попадут на детектор 31 на высотах L1 и L2 соответственно, определенных по формулам:
tgθ1 = L1/(D+S),
tgθ2 = L2/(D+S).
Тангенсы углов θ1 и θ2 удовлетворяют следующим условиям:
tgθ1 = d/D,
tgθ2 = 2d/D. (2)
Отсюда следуют такие соотношения:
L1/(D+S)=d/D,
L2(D+S)=2d/D.
Из этих соотношений следует такое выражение для луча, проходящего через n-ную прозрачную полосу:
Ln(D+S)=nd/D.
Расстояние между (n+1) и n-ным освещенными участками детектора 31 таково:
Ln+1-Ln=d(D+S)/D,
и при выражении через ωD и ωM примет вид
1/ωD = (D+S)/(ωM•D).
Решив относительно D, получаем:
D = SωD/(ωM-ωD), (3)
что показывает, что D является функцией ωD и поэтому может быть вычислено путем определения ωD света от волокна, который достигает детектора 31 после пространственной модуляции дифракционной решеткой Ронки 50.
Заметим, что это измерение D, по меньшей мере в первом приближении, не зависит от поперечного расположения волокна. Это можно понять, представив, что решетку 50 передвигают вверх на расстояние d (см. фиг. 6). Очевидно, что лучи 68 и 69 будут попадать на детектор 31 на расстояниях L1 и L2 соответственно и вышеприведенный анализ не изменяется. Конечно, если волокно передвигают достаточно далеко от оси, работа системы будет ухудшаться, когда число освещенных участков детектора 31 уменьшится. В конце концов система перестанет функционировать, когда волокно передвинут за пределы поля видимости системы.
В уравнении (3) зависимость D от ωD нелинейна. Включение системы линз между дифракционной решеткой Ронки и детектором, находящимся в задней фокальной плоскости указанной системы, обеспечивает линейность следующим образом.
Из уравнения (2) ясно, что θn для n-ной прозрачной полосы можно определить по формуле
tgθn = nd/D.
С другой стороны согласно уравнению (1), θn соответствует следующему отношению:
tgθn = Ln/f.
Соответственно, Ln может быть записано:
Ln=nfd/D,
так что Ln+1-Ln определяется выражением
Ln+1-Ln=fd/D,
и при выражении через ωD и ωM получим следующую формулу для D:
D = fωD/ωM. (4)
Таким образом, когда систему линз располагают на расстоянии f перед детектором, а дифракционную решетку Ронки - перед системой линз, то расстояние волокна от дифракционной решетки Ронки становится линейной функцией ωD. Заметим, что дифракционная решетка Ронки может быть расположена за системой линз, и система еще будет работать, но соотношение между D и ωD в общем случае не будет линейным. Соответственно, размещение дифракционной решетки Ронки перед системой линз предпочтительнее. Следует также заметить, что поскольку уравнение (1) точно только для параксиальных лучей, уравнение (4) точно только для них же.
На фиг. 7 показан пространственный спектр для системы типа, показанного на фиг.4, для волокна диаметром около 125 мкм, дифракционной решетки Ронки с величиной ωM/ около 4 периодов/мм и расстоянием D до волокна, приблизительно равным фокусному расстоянию f системы линз 27. Как видно на этой фигуре, спектр включает составляющую наружного диаметра (О.D.) с пространственной частотой ωOD, равной примерно 3,1 периода/градус, и составляющую положения с пространственной частотой ωD, равной примерно 4,3 периода/градус.
Спектр также включает две другие составляющие, обозначенные поз. 70 и 71 на фиг.7. Эти составляющие являются результатом смешивания между составляющими положения и наружного диаметра и их пространственные частоты равны сумме и разности пространственных частот составляющих положения и наружного диаметра, то есть примерно 7,4 периода/градус (4,3+3,1) и примерно 1,2 периода/градус (4,3-3,1) для фиг.7.
Эти смешанные составляющие повышают вероятность ошибок при измерении диаметра и вероятность ложного детектирования отверстий при ошибочной идентификации смешанной составляющей, как составляющей наружного диаметра или составляющей дефекта. Согласно предпочтительному варианту воплощения изобретения, этих проблем можно избежать, выбрав ωM такой величины, что ωOD становится существенно меньше, чем, во-первых, ωD и, во-вторых, ωD-ωOD, для ожидаемых расположений волокон и их диаметров.
Например, дифракционная решетка Ронки с пространственной частотой 12,3 периода/мм предпочтительна, если ожидаемые расстояния от волокон до решетки Ронки будут приблизительно равны фокусному расстоянию системы линз 27, а волокна - иметь диаметр менее примерно 200 мкм. Как показано на фиг. 8, смешанные составляющие для такой решетки, в частности низкочастотная смешанная составляющая, намного выше составляющей наружного диаметра.
Следует заметить, что при выборе такой повышенной величины ωM составляющая положения может исчезнуть ("выпасть") при определенном расположении волокна. Не рассматривая глубоко теорию этого явления, отметим, что оно возникает из-за дифракционных эффектов, когда ширина прозрачной и непрозрачной полос решетки Ронки уменьшается при возрастании пространственной частоты. Также известно, что использование низкого коэффициента заполнения усугубляет эту проблему.
Было установлено, что при предложенной выше предпочтительной величине ωM 12,3 периодов/мм "выпадения" не препятствуют контролю положения волокна при вытягивании. Конечно, в данном изобретении можно использовать и величины ωM, отличные от 12,3 периода/мм. Конкретные величины ωM для использования в любых специальных системах дистанционного контроля могут быть легко определены опытным специалистом на основании этого описания.
Спектр пространственной частоты на фиг. 7 и 8 может быть рассчитан с использованием дискретного преобразования Фурье, как это показано в пат. США N 5.309.221. Такой подход предпочитают, когда требуется высокая точность. Иной путь, который обеспечивает несколько более низкую точность, но требует меньшего времени подсчета, проиллюстрирован на фиг. 9. Этот способ будет описан на примере детектора, который имеет 2048 пикселов (элементов изображения). Должно быть ясно, что специалистом в данной области этот способ может быть легко адаптирован к детекторам, имеющим различное количество пикселов.
Первой операцией является выбор 1024 центральных пикселов из исходных 2048 пикселов, чтобы уменьшить время расчета при одновременном обеспечении достаточной разрешающей способности. Как показано в блоке 201 на фиг. 9, информативность каждого из 1024 центральных пикселов может быть повышена комплексной модуляцией согласно формуле
exp(-i•n•x•2•π/2048),
где i - квадратный корень из - 1, n - число элементов изображения, и x - желаемая величина модуляции, выбранная таким образом, что смещенная пространственная частота пика положения несколько превышает нуль. Например, если минимум ωD ожидается выше 12,0 периода/градус, то предпочтительное значение x при 16o-ном детекторе составляет 192, что будет смещать 12 периодов/градус в сторону нуля. В общем, предпочтительно использовать величины x, которые делимы на 4.
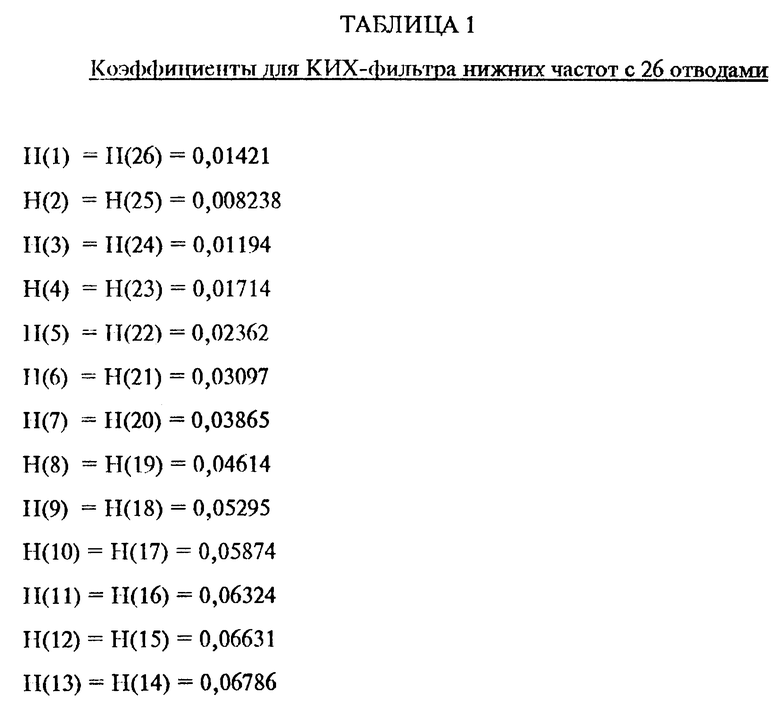
Как показано в блоке 202, следующей операцией является фильтрация модулированных сигналов в имеющем 26 ответвлений фильтре нижних частот с конечной импульсной характеристикой (КИХ). Фильтр применяют для исключения любых помех, генерируемых при прореживании в блоке 203.
Фильтр имеет ноль передачи на частоте постоянной составляющей, которая была смещена модуляцией в блоке 201. Предпочтительные коэффициенты для фильтра приведены далее в таблице 1. При этих коэффициентах среднее затухание фильтра составляет -30 дБ.
Как показано в блоке 203, следующей операцией является прореживание 1024 пикселов в соотношении 16:1. Это нужно для уменьшения времени расчета с использованием комплексного быстрого преобразования Фурье (БПФ) с одновременным сохранением достаточной разрешающей способности. На этом этапе 1024 пиксела сводят до 64 псевдопикселов.
Затем, для уменьшения утечки и зашумления сигнала и определении таким путем пространственной частоты пика местоположения с достаточной точностью, псевдопикселы обрабатывают методом окна в блоке 204. Псевдопикселы предпочтительно обрабатывать методом окна Блэкмана-Харриса по формуле
где n - индекс псевдопиксела в пределах от 0 до 63.
Как показано в блоке 205, следующей операцией является выполнение комплексного БПФ для 64 точек для преобразования значений псевдопикселов в значения пространственных частот. Комплексное БПФ может быть выполнено с использованием средств, описанных в статье Cooley, Lewis, and Welch, The Fast Fourier Trangform and its Applications, IBM Research Paper RC 1743, Feb. 9, 1967 (см. также Rabiner and Gold, Theory and Application of Digital Signal Processing, Prentice-Hall, New York, 1975, page 367 и Cooley et al., IEEE Transactions in Education, March 1969, pages 27-34). При желании могут быть использованы и другие средства. Для экономии времени частотные коэффициенты, полученные при комплексном БПФ, оставляют в квадратичной форме.
Комплексное БПФ используют потому, что он дает 64 частотных коэффициента для 64 псевдопикселов. Кроме того, гетеродинированные пики будут циклически колебаться от 0 до 63 вместо отражения за нулевую частоту. Значение этого показано ниже.
Из-за присутствия составляющей диаметра составляющая местоположения имеет две смешанные составляющие, которые для волокна диаметром 125 мкм расположены по обе стороны от составляющей местоположения в пределах около 3,1 периода/градус (см. выше). Если составляющая местоположения после выполнения операций 202-204 перемещается от примерно 13,7 периода/градус к 1,7 периода/градус, то тогда смешанные составляющие снизятся соответственно до примерно - 1,4 цикла/градус и примерно 4,8 периода/градус.
Для комплексного БПФ более низкочастотная смешанная составляющая циклически колеблется около 6,6 периода/градус. Если БПФ использовано, то эта составляющая соответствует примерно 1,4 периода/градус и таким образом пересекается с пиком местоположения примерно при 1,7 периода/градус.
Как показано в блоке 206, последней операцией способа является определение величины ωD. Для негерметично покрытого волокна вне описанных выше зон "выпадения" пик местоположения максимален. Соответственно, вначале зону пика местоположения выделяют по найденному максимуму пика пространственной частоты. Затем величину этого наибольшего пика и величины пиков по обе его стороны параболически сглаживают. Пик местоположения соответствует пространственной частоте, на которой параболическая кривая имеет максимум.
Для герметично покрытого волокна и поляризованного света одна из смешанных составляющих может быть больше, чем пик местоположения для определенных положений волокна. Поэтому для исключения смешанных составляющих пик местоположения находят, ограничивая зону поиска наибольшего пика, например, примерно ниже уровня 2,3 периода/градус для числовых величин, о которых говорилось выше.
На фиг. 10 и 11 показаны результаты применения способа согласно фиг.9 при определении местоположения волокна для оптических волноводов. Данные, приведенные на этих фигурах, получены с использованием устройства, показанного на фиг. 4. Примененная решетка Ронки имела ωM, равную 12,3 периода/мм, и коэффициент заполнения 15%. В течение длительного промежутка времени никакой сдвиг в системе не наблюдался.
На оси ординат на фиг. 10 показаны величины ωD, полученные на детекторе 31 с использованием способа согласно фиг. 9, а на оси абсцисс - фактическое местоположение волокна, измеренное с использованием испытательного приспособления, которое позволяло сегменту волокна перемещаться в пределах нескольких микронов. Ось ординат на фиг. 11 показывает разность фактических местоположений и ωD-положений, а ось абсцисс - также фактические местоположения. (Заметим, что система будет нормально настроена, если использовать кривую на фиг. 10).
Линейность способа с использованием ωD ясно видна из фиг. 10 и 11. Когда волокно перемещается ближе к детектору; т.е. вправо по фиг. 10, величина ωD линейно уменьшается. Как видно из фиг. 11, погрешность для точек в диапазоне свыше ± 150 мил (±3,8 мм) не превышает 50 мкм. Измерение разрешающей способности системы было выполнено с определением локального наклона по трем точкам, который и служил далее критерием оценки. Было обнаружено, что разрешающая способность в пределах диапазона ± 150 мил (± 3,8 мм) незначительно колеблется, но во всех случаях оказывается не хуже 10 мкм. Эти погрешности и разрешающая способность более чем достаточны для контроля местоположения волокна и управления им при протягивании волокна и для определения и управления изменением натяжения волокна, исходя из наблюдаемого положения. При желании, используя, как показано выше, средства анализа по пат. США N 5.309.221, можно достигнуть и большей точности.
Предшествующие процедуры контроля местоположения волокна предпочтительно комбинируют с процедурой измерения его диаметра, определения дефектов и контроля герметичности покрытия по процедурам в вышеуказанном Европатепте N 608.538 и патентах США NN 5.185.636 и 5.309.221. Процедуры предпочтительно комбинируют также со средствами измерения диаметров некруглых волокон согласно пат. США N 5.283.628. Как показано на фиг.2, в этом случае преимущественно используют два детектора и, соответственно, дважды измеряют положение волокна, применяя способ и устройство согласно изобретению для каждого детектора. Используя эти два измерения, можно легко определить точное положение волокна в плоскости, определяемой лазерным лучом 25, используя информацию о положении решеток Ронки, установленных перед линзовыми системами 26, 27 в этой системе общего управления, или/и с помощью калибровки.
Более общее применение способов и устройства согласно изобретению показано на фиг. 12. Здесь показана система для определения расстояния D от решетки Ронки 150 до точки 141 на рассеивающей, например диффузно отражающей, поверхности 113. Система содержит систему линз 127 и расположенный в ее задней фокальной плоскости детектор 131. Как было показано выше, система линз не обязательна и может быть при желании исключена. Точка 141 на поверхности 113 показана находящейся в передней фокальной плоскости системы линз для облегчения построения лучей света 143-146. Конечно, на реальной поверхности точка, расстояние до которой должно быть определено, не обязательно будет в этом положении.
Источник 123 испускает пучок 125 света, который проходит через отверстие 147 в детекторе 131, систему линз 127 и прозрачную полосу 148 в решетке Ронки 150. При желании источник 123 света можно располагать выше или ниже детектора 131, и в этом случае детектор может быть без отверстия. Источник 123 может генерировать обычный, a не когерентный монохроматический пучок света, хотя лазер также может быть использован. Практически важно, чтобы используемый источник 123 создавал на поверхности 113 малое световое пятно. Тогда тень от решетки Ронки 150 на детекторе 131 будет достаточно контрастна.
Система согласно фиг. 12 работает в соответствии с описанными выше принципами, и поэтому расстояние D определяют по уравнению (4). Система имеет много преимуществ в сравнении с существующими системами определения расстояния до поверхности с высокой точностью. В частности, система имеет много преимуществ перед лазерными триангуляционными системами, которые использовали в прошлом для таких измерений.
Эти преимущества таковы: (1) нечувствительность к таким характеристикам поверхности, как цвет или текстура, лишь бы эта поверхность частично отражала свет; (2) нечувствительность к внешней подсветке при условии, что модуляция, обеспечиваемая решеткой Ронки, не полностью "размывается" внешним светом на детекторе; (3) стабильность, заключающаяся в том, что результат определения местоположения не зависит от аналогового измерения и (4) меньшего угла расхождения между исходным пучком и детектируемым светом.
Лазерные триангуляционные системы сами по себе не обладают свойствами (1) - (3), но могут быть модифицированы для придания им этих свойств, однако при этом их стоимость и сложность возрастают. Свойство же (4) не может быть им придано, ибо триангуляция возможна лишь при значительных (по меньшей мере около 15o) углах расхождения лучей, направляемых на поверхность и улавливаемых детектором, причем чувствительность лазерной триангуляционной системы возрастает с ростом этого угла.
Потребность в значительном угле расхождения является серьезным недостатком лазерных триангуляционных систем, особенно в случаях контроля вогнутых поверхностей с малыми радиусами кривизны, подобно поверхности отверстия. Предложенное изобретение свободно от этих недостатков, ибо угол между лучом и детектором может быть небольшим, например ±4o и даже меньше.
При осуществлении способа согласно изобретению предпочтительно применять цифровые компьютерные системы с подходящими программами для различных вычислений и идентификации. Программы могут быть написаны на различных известных языках программирования, предпочтительно на языке C, который, в частности, хорошо подходит для описанных выше вычислений. Другими языками могут быть: FORTRAN, BASIC, PASCAL, C++ и им подобные.
Компьютерные системы могут включать универсальный компьютер и периферийные устройства, выпускаемые, например: Digital Equipment Corporation, IBM, Hewlett-Packard - или им подобные. В другом случае при осуществлении изобретения может быть использована специализированная система, например, включающая множество цифровых микропроцессоров.
Предпочтительно, чтобы процессорная часть компьютерной системы имела следующие характеристики: быстродействие - 50 млн. операций с плавающей запятой в секунду, длина слова с плавающей запятой - 32 бита, по меньшей мере 4 Мб памяти и по меньшей мере 40 Мб на жестком диске. Система должна включать средство для ввода данных с фотодетекторной матрицы и средство для ввода результатов определения местоположения как в электронной форме для управления процессом, так и в визуальной форме для наблюдения оператором и техническим персоналом. Выход может быть также снабжен дисководом, принтером или подобным устройством для дальнейшего анализа и/или последующего вывода на дисплей.
Для контроля положения волокна направляют излучение на волокно, пространственно модулируют рассеянный от волокна свет, детектируют модулированный свет и определяют пространственную частоту ωD детектированного света, которая указывает на местоположение волокна. Для управления положением волокна дополнительно генерируют управляющий сигнал, исходя из значения пространственной частоты ωD. Устройство для измерения расстояния до поверхности содержит средства освещения, средство для пространственной модуляции рассеянного света, выполненное, например, в виде решетки Ронки, средства детектирования и средства для определения пространственной частоты ωD. Повышена точность измерений. 3 с. и 11 з. п. ф-лы, 12 ил., 1 табл.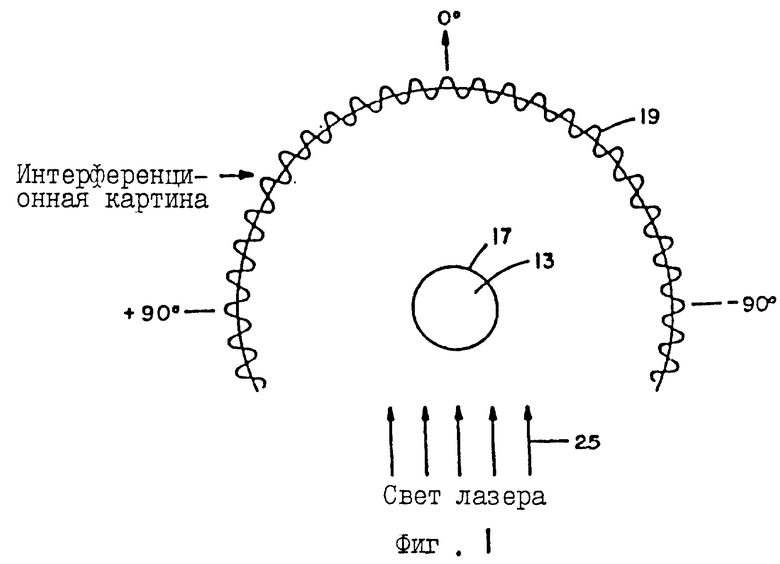
12. Устройство для измерения расстояния до поверхности, отличающееся тем, что оно содержит средства для детектирования света во множестве пространственно распределенных положений, средства освещения для направления пучка света на поверхность так, что по меньшей мере часть пучка рассеивается поверхностью на средства детектирования (рассеянный свет), средства, установленные между поверхностью и средствами детектирования, для пространственной модуляции рассеянного света, причем эта модуляция рассеянного света характеризуется пространственной частотой ωм, средства для определения пространственной частоты ωD пространственно модулированного рассеянного света на средствах детектирования, причем расстояние между средствами пространственной модуляции и поверхностью является функцией от ωD.
13. Устройство по п.12, отличающееся тем, что в качестве средств пространственной модуляции использована дифракционная решетка Ронки.
| Интерферометрический способ измерения расстояния или плосткостности | 1978 |
|
SU724921A1 |
| Способ контроля диаметра оптического волокна | 1982 |
|
SU1054679A1 |
| US 4273446 A, 16.01.1981 | |||
| А.Ф | |||
| Котюк "Введение в технику измерений оптико-физических параметров световодных систем", Радио и связь, 1987, стр.42 - 43. | |||
