Изобретение относится к области проектирования беспилотных летательных аппаратов, имеющих системы управления движением с аэродинамическими органами управления (рулями) и функционирующих в аномальных условиях эксплуатации.
Оно может быть использовано в беспилотных летательных аппаратах, работающих в условиях повышенной вероятности отказов аэродинамических органов управления.
Под отказом аэродинамического органа управления понимается либо его фиксация в каком-то определенном положении независимо от сигнала управления, либо его поломка. Фиксация руля может быть вызвана, например, обрывом линии связи между усилителем и рулевым приводом. Поломка руля может возникнуть из-за его механического повреждения. Под отказоустойчивостью (или живучестью) понимается способность системы к сохранению некоторых определяющих функций, с возможной полной или частичной потерей других функций, характеризующих работоспособное состояние системы (Рябинин И.А. Основные проблемы живучести технических систем. - Л., Военно-морская академия, 1983 г., 27 с.).
Известны системы управления движением беспилотного летательного аппарата, использующие рули типа поворотного оперения. Наиболее близкой по технической сущности к заявляемому устройству является система управления движением беспилотного летательного аппарата US N 3807666 (B 64 C 13/18, 30.04.1974), выбранная в качестве прототипа.
Рули относятся к аэродинамическим органам управления движением летательного аппарата. Руль представляет собой металлическую пластину определенной формы, прикрепленную одним своим концом к оси рулевого привода. Привод служит для поворота руля относительно нейтрального положения. Сигнал для управления приводом подается с автопилота (или бортового цифрового вычислительного комплекса), на который возложены функции по управлению движением беспилотного летательного аппарата и стабилизации его положения в пространстве. Сигнал с автопилота на рулевой привод проходит через усилитель для доведения его до необходимой мощности.
Система управления движением, расположенная на беспилотном летательном аппарате 1 (см. фиг. 1), содержит последовательно соединенные усилитель 2, рулевой привод 3 и аэродинамический орган управления 4. Сигнал для поворота летательного аппарата на определенный угол в одной из плоскостей стабилизации подается с соответствующего выхода автопилота 5. Автопилот предназначен для стабилизации аппарата в пространстве по трем каналам: рысканию, тангажу и крену. Система управления движением включает в себя все три канала. Для простоты изложения и определенности примем для рассмотрения один из каналов системы управления движением - канал тангажа.
На вход системы управления движением аппарата по каналу тангажа, а именно на вход усилителя 2, подается сигнал с выхода автопилота 5, предназначенный для разворота аппарата по углу тангажа. Сигнал усиливается по мощности в усилителе 2 и поступает на рулевой привод 3. Рулевой привод, будучи механически связан с аэродинамическим органом управления 4, разворачивает его на заданный угол. Ось руля проходит через корпус беспилотного летательного аппарата 1. Отклонение руля на определенный угол заставляет беспилотный летательный аппарат 1 развернуться в сторону отклонения руля.
Данной традиционной системе управления движением беспилотного летательного аппарата присущи следующие существенные недостатки, обусловленные ее низкой отказоустойчивостью, в частности, к механическим повреждениям:
1. Воздействие механического повреждения на рулевой орган проявляется в виде частичной или полной потери управляющей поверхности руля. Изменение площади поврежденного руля, например руля высоты, сказывается на появлении возмущающих моментов по крену, рысканию и тангажу. Последний момент, как правило, не может быть скомпенсирован действием другого неподвижного руля, обеспечивающего управление по данному каналу управления беспилотным летательным аппаратом. Парирование возмущающего момента по крену не всегда обеспечивается системой стабилизации летательного аппарата из-за изменения аэродинамических характеристик поврежденного руля.
2. Кроме того, появление возмущения по одному из каналов стабилизации беспилотного летательного аппарата (в данном случае тангажа) приводит к развороту ракеты в той плоскости стабилизации, в которой нарушен орган управления. Будучи нескомпенсированной, ошибка управления беспилотным летательным аппаратом в данном канале еще более увеличивается, что приводит к эффекту положительной обратной связи. В результате чего, например, беспилотный летательный аппарат, летающий низко над морской поверхностью, приводняется, не выполняя при этом поставленной задачи.
3. При решении задачи о повышении живучести рулевых органов управления движением беспилотного летательного аппарата возникает необходимость в решении технического противоречия. Суть противоречия заключается в следующем. С одной стороны, руль должен присутствовать для того, чтобы управлять движением беспилотного летательного аппарата. С другой стороны, руля быть не должно, поскольку наличие руля служит предпосылкой его возможных механических повреждений и поломок.
Технический результат заключается в повышении вероятности удержания беспилотного летательного аппарата на кинематической траектории полета путем парирования изменения аэродинамических характеристик руля, которое возникло из-за его повреждения.
Указанный результат достигается посредством подключения дополнительно в каждый канал управления системы к выходу усилителя через первый вход логического элемента И и его выход последовательного соединения дополнительного рулевого привода и газодинамического органа управления. При этом к выходу логического элемента И подсоединен вход дополнительного рулевого привода, выход которого связан со входом газодинамического органа управления. Вход блока идентификации повреждения аэродинамического органа подключен к этому органу, а выход блока идентификации связан со входом автопилота. Второй выход автопилота соединен со вторым входом логического элемента И.
Разрешение указанного противоречия достигается посредством введения в каждый канал управления системы дополнительного рулевого привода и газодинамического (струйного) органа управления. При этом, струя, с одной стороны, выполняет функции органа управления движением, а, с другой стороны, струя не подвержена разрушениям от механических повреждений. Достоинства и недостатки системы струйного управления движением и стабилизации беспилотного летательного аппарата приведены в работе [2, п.5.3. "Способы соединения управляющих моментов", стр. 50-51].
Изменение поверхности аэродинамического органа управления вследствие его повреждения фиксируется, а величина оставшейся неповрежденной площади крыла измеряется с помощью вводимого блока идентификации повреждения. А именно, в каждом канале системы управления движением беспилотного летательного аппарата дополнительно установлены последовательно соединенные рулевой привод и газодинамический орган управления. Блок идентификации повреждения аэродинамического органа управления механически связан с этим органом и непрерывно вырабатывает электрический сигнал о величине неподвижной площади руля, который поступает на тот вход автопилота, каковому соответствует данный канал управления.
В автопилоте производится сравнение неповрежденной площади руля с определенным пороговым значением. При выходе величины оставшейся неповрежденной площади руля за пределы порога устойчивости летательного аппарата автопилот вырабатывает команду на переход к резервному блоку управления. Команда на включение в действие резервного блока системы управления движением подается с дополнительного выхода автопилота через логический элемент И, причем на другой вход указанного элемента поступает сигнал с выхода усилителя.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых блоков - дополнительного рулевого привода с газодинамическим органом управления, логического элемента И и блока идентификации повреждения аэродинамического органа управления. Таким образом, заявляемое устройство соответствует критерию "новизны".
Сравнение заявляемого решения с другими техническими решениями показывает, что введение в заявляемое устройство блока идентификации повреждения аэродинамического органа управления, необходимого для измерения неповрежденной площади этого органа, а также дополнительных последовательно соединенных рулевого привода с газодинамическим органом управления, наряду с логическим элементом И, посредством которого автопилот включает резервный блок управления движением, обеспечивает повышение вероятности удержания беспилотного летательного аппарата на кинематически заданной траектории в пределах допустимых ошибок при повреждении аэродинамических рулевых органов управления. Это позволяет сделать вывод о соответствии технического решения критерию "изобретательский уровень".
Изобретение иллюстрируется фигурами.
На фиг. 1 представлена структурная схема канала управления в одной из плоскостей стабилизации для существующей системы управления движением беспилотного летательного аппарата.
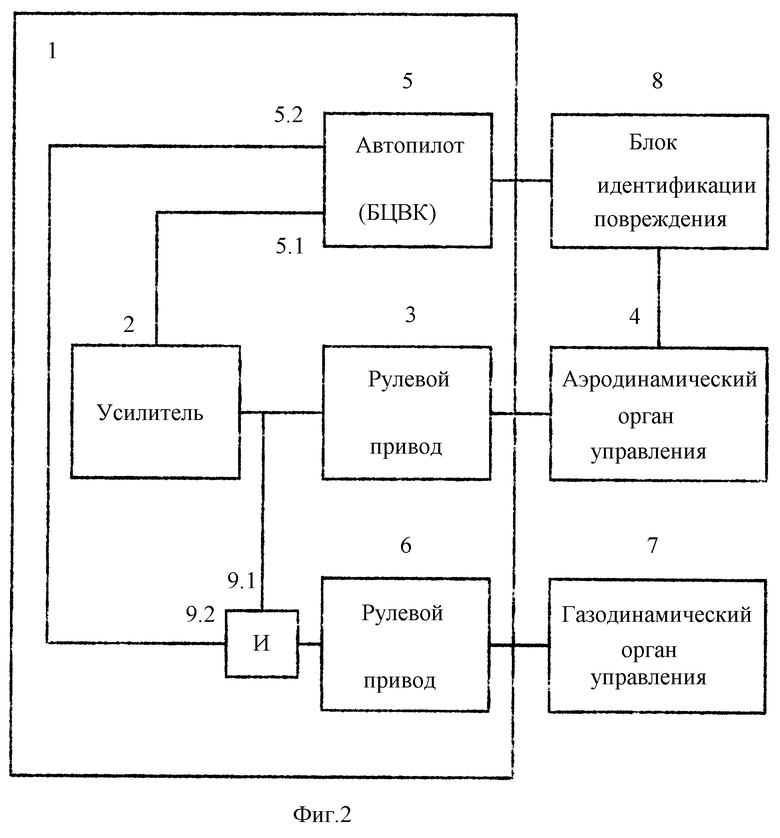
На фиг. 2 представлена структурная схема канала управления в одной из плоскостей стабилизации для заявляемой системы управления движением беспилотного летательного аппарата.
Заявляемое устройство - система управления движением беспилотного летательного аппарата - содержит (на фиг. 2 показан один из идентичных по построению каналов управления движением) беспилотный летательный аппарат 1, усилитель 2, рулевой привод 3, механически связанный с аэродинамическим органом управления 4, рулевой привод 6, механически связанный с газодинамическим органом управления 7, вход блока идентификации повреждения 8 аэродинамического органа управления 4 механически связан с аэродинамическим органом управления 4, а выход блока 8 электрически связан со входом автопилота 5. Первый вход логического элемента И 9 связан с выходом усилителя 2, а второй его вход - с дополнительным выходом автопилота 5, выход логического элемента 9 соединен со входом рулевого привода 6.
Последовательное соединение усилителя 2, рулевого привода 3 и аэродинамического органа управления 4 образуют в совокупности с автопилотом 5 основную систему управления движением беспилотного летательного аппарата 1. С другой стороны, последовательное соединение усилителя 2, логического элемента 9, рулевого привода 6 и газодинамического органа управления 7 образуют в совокупности с блоком идентификации повреждения 8 аэродинамического органа управления 4 и автопилотом 5 резервную систему управления движением беспилотного летательного аппарата 1.
Устройство работает следующим образом. Предположим, что в процессе полета беспилотного летательного аппарата происходит отказ аэродинамического органа управления 4 (руля). Отказ обусловлен, например, механическим повреждением руля, выраженный в том, что часть руля отламывается.
Сокращение площади руля приводит к изменению его основной аэродинамической характеристики - частной производной коэффициента подъемной силы летательного аппарата по углу отклонения концевого руля [2, с 176].

где c
Kδ0 - коэффициент интерференции;
n - относительная эффективность органа управления;
SII -площадь неповрежденного аэродинамического органа управления - консолей рулей;
S - характерная площадь летательного аппарата; относительная площадь руля;
относительная площадь руля;
kт - коэффициент торможения потока в области задних несущих поверхностей (рулей).
Тогда подъемная сила, создаваемая рулем, равна
(Y1)II = c
где qII=kт•q - средний скоростной напор в области рулей.
Уменьшение площади одного из рулей приводит к соответствующему уменьшению его нормальной силы и развиваемого этой силой момента тангажа. В результате чего нарушаются продольная и поперечная балансировки летательного аппарата, что, в свою очередь, приводит к неуправляемому развороту беспилотного летательного аппарата по тангажу и крену. Следует иметь в виду, что незначительное сокращение площади руля может сохранить беспилотный летательный аппарат в пределах его областей продольной и поперечной устойчивости.
Однако существует такое граничное сокращение площади руля, которое выводит летательный аппарат за пределы областей его устойчивости. Потеря устойчивости в случае полета, например, беспилотного летательного аппарата на малой высоте над земной или морской поверхностью может привести к удару летательного аппарата о нее. Удар влечет за собой потерю летательного аппарата и, как следствие, невыполнение поставленной задачи.
Блок идентификации повреждения 8 измеряет величину неповрежденной площади аэродинамического руля 4 и в виде электрического сигнала передает ее на тот вход автопилота 5, который соответствует каналу управления беспилотным летательным аппаратом по тангажу.
Автопилот 5 определяет характер отказа аэродинамического органа управления: обрыв цепи в системе управления или повреждение руля. Обрыв цепи фиксируется в автопилоте 5 при исправном аэродинамическом руле, о чем свидетельствует сигнал с блока идентификации повреждения аэродинамического органа управления 8 и отсутствие реакции летательного аппарата 1 на сигнал управления рулем 4.
Факт повреждения аэродинамического органа управления 4 фиксируется блоком идентификации повреждения 8. Автопилот 5 определяет: выводит ли полученное повреждение руля 4 беспилотный летательный аппарат 1 за пределы границы областей продольной и поперечной устойчивости. В случае существенного повреждения руля 4 автопилот 5 подает команду на второй вход логического элемента И 9 для подключения сигнала с выхода усилителя 2 к резервному блоку системы управления движением.
Таким образом, включение резервного газодинамического блока 7 управления движением беспилотного летательного аппарата позволяет парировать уменьшение площади аэродинамического руля 4 подачей определенной боковой силы газодинамического руля 7. Благодаря этому резервированию летательный аппарат работает в пределах областей устойчивости и сохраняет свойства управляемости, что позволяет удерживать аппарат на кинетически заданной траектории в пределах допустимых ошибок.
Для заявляемого устройства вероятность удержания беспилотного летательного аппарата на кинематически заданной траектории полета с отказом аэродинамического органа управления значительно выше, чем у прототипа, что является существенным преимуществом, позволяющим резко увеличить безопасность полета беспилотных летательных аппаратов и обеспечить гарантированное выполнение летательным аппаратом поставленной задачи.
С целью оценки эффективности предлагаемого изобретения было проведено цифровое моделирование полета беспилотного летательного аппарата методом статистических испытаний. В процессе полета аппарата производилось повреждение одного или сразу нескольких из четырех аэродинамических органов управления. В среднем неповрежденная площадь каждого из аэродинамических рулей составляла порядка 80-90%. После измерения оставшейся неповрежденной площади аэродинамических рулей производилось их резервирование посредством подключения газодинамических органов. Причем газодинамические органы во время дальнейшего полета летательного аппарата уже не повреждались.
Введение предлагаемой системы управления движением беспилотного летательного аппарата позволило увеличить вероятность подлета летательного аппарата к цели с 0.7 до 0.9. Если же величину неповрежденной площади каждого из аэродинамических рулей снизить с 0.9 до 0.5, то эффективность предлагаемой системы управления увеличится еще более.
Заявляемое устройство реализовано на уровне технического предложения и может найти применение как в пилотируемых, так и беспилотных летательных аппаратах, для которых критичны отказы рулевых органов управления.
Изобретение относится к автоматическим системам управления. Его использование при управлении движением беспилотных летательных аппаратов позволяет получить технический эффект в виде повышения вероятности удержания беспилотного летательного аппарата на кинематической траектории полета. Эта система управления в каждом канале управления в одной из плоскостей стабилизации содержит автопилот, усилитель, рулевой привод, аэродинамический орган управления, а также логический элемент И. Технический результат достигается благодаря тому, что в каждый канал управления введены соединенные последовательно дополнительный рулевой привод и газодинамический орган управления, а также блок идентификации повреждения. При обнаружении повреждения аэродинамического органа управления блоком идентификации повреждения происходит подключение дополнительного рулевого привода и газодинамического органа управления, таким образом, осуществляется удержание беспилотного летательного аппарата на кинематической траектории полета. 2 ил.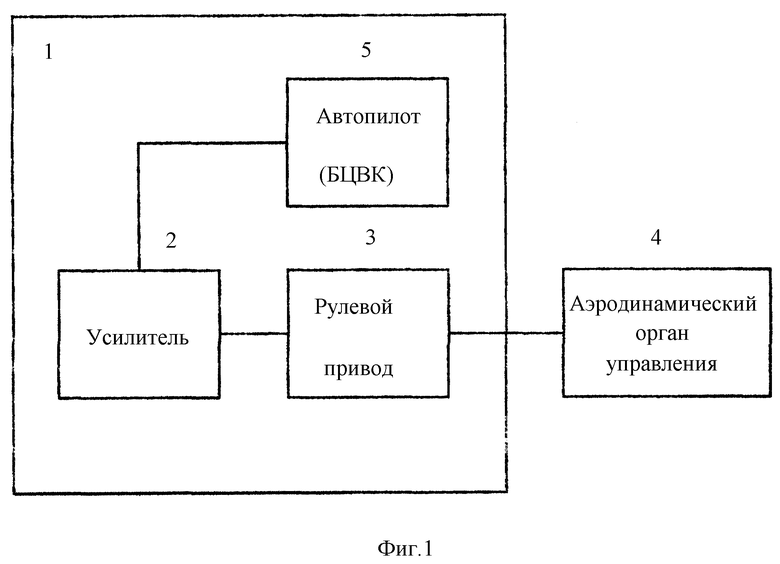
Система управления движением летательного аппарата, каждый канал управления которой в одной из плоскостей стабилизации содержит автопилот, первый выход которого через усилитель соединен со входом рулевого привода, при этом выход рулевого привода соединен со входом аэродинамического органа управления, а также логический элемент И, отличающийся тем, что в каждый канал управления введены соединенные последовательно дополнительный рулевой привод и газодинамический орган управления, а также блок идентификации повреждения, вход которого соединен с выходом аэродинамического органа управления, а выход соединен со входом автопилота, второй выход которого и выход усилителя подключены к первому и второму входам логического элемента И, выход логического элемента И соединен со входом дополнительного рулевого привода.
| US 3807666 A, 30.04.1974 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| SU 1098172 A1, 20.01.1996 | |||
| US 3847328 A, 12.11.1974 | |||
| ЛЕБЕДЕВ А.А., ЧЕРНОБРОВКИН Л.С | |||
| Динамика полета беспилотных летательных аппаратов | |||
| Учебное пособие для вузов | |||
| - М.: Машиностроение, 1973, с.47-51, 512-525. | |||

